Commande de l'éclairage public et mesure de la température à base de pic18f4550( Télécharger le fichier original )par Soufiane SMAIL Université Mohamed Khider Biskra- Algérie- Département de Génie Electrique - Master 2013 |

.ÉÑÇäáÇÇ ÇÞíÅæ áíÛÔÊ ÊÇÞæ ìáÚ ÉÑØíÓáÇæ Commande de l'éclairage public et mesure de la température à base de PIC18F4550 viii Sommaire SOMMAIRE INTRODUCTION GENERALE. 1 I. 1 Introduction. . 2 I. 2 Les dispositifs de commande. . 2 I. 2.1 Allumage manuel. . 2 I. 2.2 Cellule photosensible avec ou sans réglage de sensibilité. . 2 I. 2.3 Horloge simple. 3 I. 2.4 Calculateur astronomique. 4 I. 2.5 Les commandes centralisées. 5 I. 2.6 Commande par voie hertzienne. 5 I. 3 Les modes de fonctionnement. 5 I. 3.1 Fonctionnement permanent. 5 I. 3.2 Fonctionnement semi-permanent (coupure nocturne). . 5 I. 3.3 Fonctionnement par régulation / réduction de puissance (régulation de tension). 6 I. 4 Conclusion. 6 Chapitre II : Présentation du PIC 18F4550II. 1 Introduction. 7 II. 2 Définition d'un microcontrôleur. . 7 II. 3 Définition d'un PIC. 7 II. 4 Les différentes familles de PIC. 7 II. 5 Identification des PIC. 8 II. 6 Le choix d'un PIC. 8 II. 7 Caractéristiques principales du pic 18F4550. 9 II. 8 Brochage du PIC18F4550. 10 II. 9 Les horloges système du PIC18F4550. 10 II. 10 Le Reset. 11 II. 11 Les Ports d'entrées / sorties. 12 II. 11.1 Généralités sur les ports. . 12 II. 11.2 Les principaux registres liés aux ports. . 12 II. 12 Architecture interne du PIC18F4550. 13 II. 12.1 Organisation de la mémoire. 15 Commande de l'éclairage public et mesure de la température à base de PIC18F4550 ix Sommaire II. 12.1.1 Mémoire de programme. . 15 II. 12.1.2 Mémoire de données. 15 II. 12.2 Les timers. 16 II. 12.3 Unité arithmétique et logique UAL et registre de travail W. . 16 II. 12.4 Les convertisseurs analogiques / numériques. . 16 II. 12.4.1 Registre ADCON0. 17 II. 12.4.2 Registre ADCON1. 18 II. 12.4.3 Registre ADCON2. 19 II.14 Conclusion. 20 III. 1 Introduction. 21 III. 2 Etapes de développement du programme. . 21 III. 3 Présentation du MikroC. 22 III. 3. 1 Création d'un projet. 22 III. 3. 2 Quelques notions de programmation en C sous MikroC. 24 III. 3. 3 Les instructions de MikroC. 24 III. 3. 4 Les bibliothèques du MikroC. 26 III. 3. 5 Bus I2C. 27 III. 3. 5. 1 Présentation de Bus I2C. . 27 III. 3. 5. 2 Principe de fonctionnement du bus I2C. . 27 III. 3. 5. 3 Bus I2C et MikroC. . 28 III. 3. 6 Le convertisseur analogique numérique et MikroC. 30 III. 4 Présentation du logiciel ISIS. 30 III. 4.1 Simulation par ISIS. 32 III. 5 Transfert du programme vers PIC. 33 III. 5.1 Comment utiliser PICPgm. 33 III. 5.2 Programmateur proposé. 33 III. 6 Organigramme de programme. 35 III. 7 Conclusion. 41 Chapitre IV : Conceptions et réalisation de systèmeIV. 1 Introduction. 42 IV. 2 Etude théorique. 42 Commande de l'éclairage public et mesure de la température à base de PIC18F4550 x Sommaire IV. 2.1 Les équations de l'algorithme utilisé dans les calculs. 42 IV. 2.1.1 Les coordonnées géographiques. 42 IV. 2.1.2 Les fuseaux horaires. 43 IV. 2.1.3 Crépuscule. 44 IV. 2.1.4 Les équations. 44 IV. 2 Les différents blocs de la carte. 45 IV. 2.1 L'Alimentation. 46 IV. 2.1.1 Principe du montage. 46 IV. 2.2 Le capteur de lumière (LDR). 47 IV. 2.2.1 Définition. 47 IV. 2.2.2 Principe de fonctionnement. 47 IV. 2.2.3 Principe du montage. 48 IV. 2.3 Le capteur de Température. 49 IV. 2.3.1 Le capteur LM35. 49 IV. 2.3.2 Brochage du LM35. 49 IV. 2.4 Interface commande puissance. 49 IV. 2.5 L'interface utilisateur. 50 IV. 2.5.1 L'afficheur LCD. 51 IV. 2.5.2 Le clavier (les boutons poussoirs et les LED). . 53 IV. 2.6 Horloge. 54 IV. 2.6.1 Description du composant. . 54 IV. 2.6.2 Brochage du DS1307. . 55 IV. 2.6.3 Schéma du module RTC. . 56 IV. 2.7 Unité de contrôle. 56 IV. 3 Fonctionnement de système. 58 IV. 4 Consommation d'énergie. 60 IV. 5 Conclusion. 60 CONCLUSION GENERALE. 61 Bibliographie. 62 Annexe. 64 Commande de l'éclairage public et mesure de la température à base de PIC18F4550 A Introduction généraleINTRODUCTION GENERALEL'éclairage public est l'un des besoins les plus importants dans notre vie quotidienne, qui varie dans la forme, l'objectif et les utilisations, outre il est représenté une part conséquente de la consommation d'énergie. Avec la libéralisation du marché de l'électricité et l'augmentation importante des coûts de l'énergie facturée aux communes, l'éclairage public est devenu un enjeu majeur. Dans de nombreuses communes, l'énergie consommée par l'éclairage public représente la plus grande proportion de leur facture d'électricité annuelle. Généralement la raison principale est l'utilisation d'anciens systèmes de commande. La commande peut agir sur la durée d'allumage et la quantité de lumière nécessaire. Donc dans le cas d'un mauvais fonctionnement de ces systèmes, il aura une incidence directe sur la consommation d'énergie, ce dernier est constitué une charge financière qui peut grever de manière sensible le budget des communes. Bien sûr, il y a beaucoup de facteurs qui influent sur la consommation d'énergie, mais les plus influents sont les systèmes de commande de l'éclairage public. Alors la question qui se pose « Quelles sont les solutions possibles pour la commande optimal de l'éclairage public ? ». Dans ce travail l'intérêt majeur est attribuée à la recherche trouvée d'une solution automatisée pour la commande de l'éclairage public, cette solution sera représenté dans un système embarquée (un système électronique et informatique autonome spécialisé dans une tâche bien précise) est basé sur un microcontrôleur (PIC18F4550). En outre, il ya des fonctions supplémentaires comme mesure de température et affichage de certaines informations comme la date et l'heure. Ce mémoire comporte quatre chapitres : Le Premier chapitre est axé sur les Considérations Générales où nous avons donné les différents types de système utilisé dans la commande de l'éclairage public. Le deuxième chapitre est axé sur le microcontrôleur PIC18F4550, que nous avons étudié toutes ses caractéristiques et ses description détaillées. Le troisième chapitre présente les logiciels utilisés pour la programmation de notre microcontrôleur PIC18F4550 et la simulation. La conception et la réalisation pratique de notre carte, fait l'objectif du quatrième chapitre Enfin, notre mémoire est clôturé par une conclusion générale.
Chapitre ILes différents types de commande Chapitre 1 Les différents types de commande Commande de l'éclairage public et mesure de la température à base de PIC18F4550 2 I. 1 IntroductionL'éclairage public représente une part conséquente de la consommation d'énergie. Il ya beaucoup de façons de réduire la consommation d'énergie, tels que la qualité des lampes sont utilisées et les types utilisés de la commande d'éclairage ... Etc. Dans ce chapitre, nous allons identifier certains types d'appareils utilisés dans la commande de l'éclairage public. I. 2 Les dispositifs de commandeLa commande d'éclairage public est l'organe qui contrôle la mise en service et la mise hors service des appareils d'éclairage qui lui sont raccordés par les réseaux d'alimentation. L'éclairage public, dans la très grande majorité des cas, doit fonctionner quand la lumière naturelle n'est pas suffisante pour assurer une vision suffisante nécessaire à la sécurité et au confort de tous les usagers des espaces publics (conducteurs, cyclistes, piétons ... ) Il est donc indispensable que l'éclairage soit en fonction dès la tombée de la nuit lorsque la lumière naturelle devient insuffisante, jusqu'au lever du jour, quand elle est à nouveau suffisante. La maîtrise de l'énergie au niveau du système de commande peut se faire en agissant sur la maîtrise des temps de fonctionnement et sur la maîtrise de la puissance absorbée par les installations [1]. Les différents types de commande généralement rencontrés sont les suivants : I. 2.1 Allumage manuelC'est le plus rudimentaire des modes de commande. L'éclairage est déclenché par un simple interrupteur manoeuvré à la demande. Obsolète - à proscrire principalement parce que très ancien et de ce fait réalisé en dehors des actuelles règles de l'art. En particulier, il se rencontre parfois sans organe de protection (ni fusibles, ni disjoncteur) [1]. I. 2.2 Cellule photosensible avec ou sans réglage de sensibilitéC'est le système communément appelé « lumandar (Fig. I.1) ». L'appellation générique est « commande par cellule photoélectrique» ou « interrupteur crépusculaire ». Le principe réside par la commande de la fermeture du contacteur de commande, pilotée par l'état de sortie d'une cellule photoélectrique. Il existe différentes technologies, mais toutes sont plus ou moins sensibles à dérive au fil du temps (vieillissement) ou en fonction de la température. De ce fait, on assistera à une variation importante des temps annuels de fonctionnement. Ce dispositif nécessitera donc un réglage périodique faute de quoi les heures d'allumage et d'extinction ne sont pas optimales [1].
Chapitre 1 Les différents types de commande Commande de l'éclairage public et mesure de la température à base de PIC18F4550 3 Fig. I.1 : Le lumandar I. 2.3 Horloge simpleUne horloge «classique» (Fig. I.2) est installée et commande l'allumage et l'extinction. Ceci se rencontre parfois lors de diagnostics dans les armoires de commande de l'EP de certains anciens lotissements privés ou résidences où les lotisseurs ont largement minimisé les investissements, mais où l'énergie est prise en charge par la collectivité, ce qui est cela dit, parfaitement illégal si la voirie n'a pas été intégrée dans le domaine public (délit dit « de concussion »). Inconvénient majeur : les heures de bascule de l'horloge doivent être régulièrement modifiées. Cette contrainte fait que le responsable, pour espacer ses interventions dans l'armoire de commande, a tendance à anticiper largement l'allumage quand les jours raccourcissent et omet parfois de retarder celui-ci quand les jours allongent. L'éclairage fonctionne alors parfois longuement en plein jour, ce qui se traduit par des temps annuels d'allumage supérieurs à 5 000 heures. A proscrire [1].
Chapitre 1 Les différents types de commande Commande de l'éclairage public et mesure de la température à base de PIC18F4550 4 Fig. I.2 : L'horloge classique I. 2.4 Calculateur astronomiqueÉgalement appelé horloge astronomique (Fig. I.3). C'est un système datant des années 90. Il est composé d'un boîtier modulaire placé dans le coffret de commande de l'éclairage avec une antenne intérieure est parfois disponible pour une remise à l'heure journalière automatique, afin de pallier la dérive minime du quartz de l'appareil. Il n'y a pas de capteur externe. Cet appareil calcule l'heure d'allumage et d'extinction en fonction des éléments initialisés à l'installation qui sont principalement la date et l'heure et la longitude et latitude du site (coordonnées géographiques). Un algorithme de calcul permet de connaître chaque jour l'heure exacte de l'aurore et de l'aube et ainsi de commander plus précisément l'allumage et l'extinction [1], [2].
Fig. I.3 : Calculateur astronomique Chapitre 1 Les différents types de commande Commande de l'éclairage public et mesure de la température à base de PIC18F4550 5 I. 2.5 Les commandes centraliséesLes commandes centralisées reprennent, bien entendu, les fonctions essentielles des organes de commande d'éclairage public. On peut utiliser un interrupteur crépusculaire couplé avec une horloge de précision ou une horloge astronomique radio pilotée. Ces dispositifs permettent, soit par système radio, soit par système de téléphonie de type GSM, de piloter une commande d'éclairage public équipée des modules de réception. Les commandes centralisées ont pour objectif d'optimiser les durées de fonctionnement et surtout de synchroniser l'ensemble des points d'allumage d'une collectivité. De plus, il peut permettre de moduler l'éclairage public dans certaines zones [3]. I. 2.6 Commande par voie hertzienneCe principe repose sur l'émission d'ordres d'allumage / extinction depuis un émetteur au niveau de la commande centrale, lui-même opérant généralement grâce à un calculateur astronomique couplé à une cellule photoélectrique. Les ordres émis sont reçus par des récepteurs au niveau de chaque point de livraison d'énergie électrique [1]. I. 3 Les modes de fonctionnementAssociés à ces commandes différents modes de fonctionnement sont possibles favorisant plus ou moins la maitrise de l'énergie [1] : - Fonctionnement permanent - Fonctionnement semi-permanent - Fonctionnement par régulation / réduction de puissance I. 3.1 Fonctionnement permanentC'est le régime de fonctionnement le plus répandu : allumage le soir, extinction le matin. Un interrupteur crépusculaire suffit à assurer ce type de fonctionnement. Quand le dispositif d'allumage / extinction est correctement réglé, ce type de fonctionnement engendre un temps annuel d'utilisation de l'ordre de 4100 heures. I. 3.2 Fonctionnement semi-permanent (coupure nocturne)C'est le plus rudimentaire des moyens de maîtrise de l'énergie, mais c'est aussi le plus efficace ! Très bien accepté en zone rurale, il l'est cependant moins en zone urbaine . C'est aussi le moyen de lutte le plus radical contre la pollution lumineuse. Le coût d'une horloge simple étant très faible, le retour sur investissement est très court quel que soit le nombre d'appareils . Chapitre 1 Les différents types de commande Commande de l'éclairage public et mesure de la température à base de PIC18F4550 6 L'économie énergétique permise par ce type de dispositif est de plus de 8% par heure d'extinction. Les limites du recours à ce dispositif sont liées à l'inconfort en absence d'éclairage . L'insécurité (sur la route ou pour les biens et les personnes) en absence d'éclairage est aussi un motif souvent invoqué, mais également source de débat . La coupure nocturne double le nombre d'allumages des lampes sous pleine puissance. Les lampes s'usent plus vite lors de ces allumages. Il n'est donc pas recommandé d'effectuer une coupure nocturne trop courte. I. 3.3 Fonctionnement par régulation / réduction de puissance (régulation de tension)Il s'agit à proprement parlé d'une réduction de l'éclairement à certaines heures de la nuit . Cette régulation de tension à l'armoire apporte un nombre important d'avantages à savoir : -la réduction de la dépense énergétique grâce à la limitation de la puissance aux heures creuses. -L'annulation des surtensions permettant à la source de travailler à un rendement maximal. -Le maintien d'un éclairage de nuit contrairement à la coupure nocturne vue précédemment en répondant au souhait de maintien de l'éclairage toute la nuit. - La préservation de la durée de vie des lampes en éliminant les surtensions et en assurant pour certains modèles des rampes progressives de montée en tension qui permettent de limiter les surintensités appelées sur le réseau lors de l'allumage des installations. I. 4 ConclusionDans ce chapitre, nous avons offert un aperçu de l'éclairage public et les différents types de commande. L'objectif de ce chapitre est de simplifier la compréhension du principe de commande de l'éclairage public pour tirer parti dès les idées à la construction de notre projet.
Chapitre IIPrésentation du PIC 18F4550 Chapitre II Présentation du PIC 18F4550 Commande de l'éclairage public et mesure de la température à base de PIC18F4550 7 II. 1 IntroductionLes microcontrôleurs sont très utilisés dans le monde de l'industrie, notamment dans les systèmes embarqués. On pourra donc les retrouver dans l'aéronautique, l'aérospatial, l'automobile, l'électronique grand publique. Leur polyvalence, et leur taille les rendent intéressants pour des modules de traitement de données numériques et aussi analogiques. Ils sont certes peu puissant comparés à des processeurs dédiés, mais ils les compensent par leur prix mais surtout leur taille : un microcontrôleur peut être comparé à une carte mère d'ordinateur. Dans ce chapitre nous présentons une description détaillée sur microcontrôleur (PICs de Microchip). II. 2 Définition d'un microcontrôleurUn microcontrôleur, est un composant électronique qui rassemble tous les éléments d'un "mini-ordinateur" et qui se présente sous la forme d'un circuit intégré. Un microcontrôleur permet de réaliser des systèmes et montages électroniques programmés. Cela veut dire que l'on pourra, avec le même montage, réaliser des fonctions très différentes qui dépendront du programme qui aura été programmé dans le microprocesseur [4]. II. 3 Définition d'un PICUn PIC (Programmable Interface Contrôler) est une unité de traitement de l'information de type microprocesseur à laquelle on a ajouté des périphériques internes permettant de faciliter l'interfaçage avec le monde extérieur sans nécessiter l'ajout de composants externes. Les PICs sont des composant dits RISC (Reduced Instructions Set Computer), ou encore composant à jeu d'instruction réduit. Le microcontrôleur se trouve, dans plusieurs appareils telle que : les téléphones portables, machines à laver, télévisions vidéos ... etc. [5]. II. 4 Les différentes familles de PICLes PICs sont subdivisés en 3 grandes familles [5] : - La famille Base-Line, qui utilise des mots d'instructions de 12 bits. - la famille Mid-Range, qui utilise des mots de 14 bits (et dont font partie les 16F84 et 16F876) - la , qui utilise des mots de 16 bits. Chapitre II Présentation du PIC 18F4550 Commande de l'éclairage public et mesure de la température à base de PIC18F4550 8 II. 5 Identification des PIC :Un PIC est généralement identifié par une référence de la forme suivante : xx(L)XXyy-zz [6] xx : famille du composant, actuellement « 12, 14, 16, 17 et 18 ». L : tolérance plus importante de la plage de tension XX : type de mémoire programme C : EPROM ou EEPROM CR : PROM F : Flash yy : Identificateur. zz : vitesse maximale du quartz de pilotage.
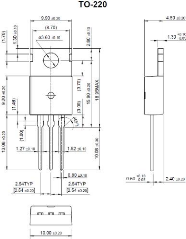
Fig. II.1 exemple de l'identification PIC18F4550 II. 6 Le choix d'un PICLe choix d'un PIC est directement lié à l'application envisagée [5] : Il faut dans un premier temps déterminer le nombre d'entrées/sorties nécessaires pour l'application. Ce nombre d'entrées/sorties nous donne une idée sur la famille du PIC. Il faut ensuite déterminer si l'application nécessite un convertisseur Analogique/ Numérique ce qui va centrer un peu plus vers le choix du PIC. La rapidité d'exécution est un élément important, il faut consulter les DATA-BOOK pour vérifier la compatibilité entre la vitesse maximale du PIC choisi et la vitesse max nécessaire au montage. La taille de la RAM interne et la présence ou nom d'une EEPROM pour mémoriser des données est également important pour l'application souhaitée. La longueur de programme de l'application détermine la taille de la mémoire programme du PIC recherché. Afin de choisir un PIC adéquat à notre projet, nous avons pensé à l'utilisation du PIC PIC18F4550. Chapitre II Présentation du PIC 18F4550 Commande de l'éclairage public et mesure de la température à base de PIC18F4550 9 II. 7 Caractéristiques principales du pic 18F4550Les caractéristiques principales du 18F4550 sont résumées comme suit :
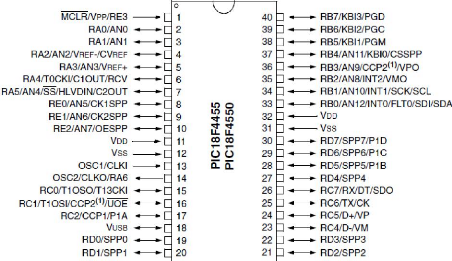
II. 8 Brochage du PIC18F4550
II. 9 Les horloges système du PIC18F4550
II. 10 Le Reset
II. 11.1 Généralités sur les ports
II. 11.2 Les principaux registres liés aux ports
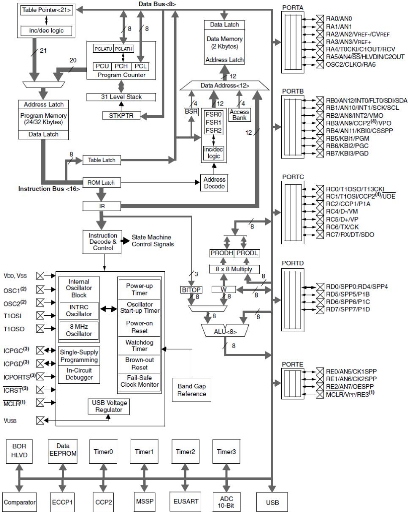
II. 12 Architecture interne du PIC18F4550
II. 12.1 Organisation de la mémoire
II. 12.1.1 Mémoire de programme
II. 12.1.2 Mémoire de données
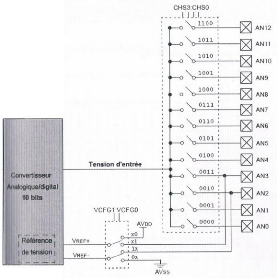
Sont des positions mémoire que l'utilisateur peut utiliser pour stocker ses variables et ces données. On remarque donc que, indépendamment de leur nature, les positions de la RAM sont toujours appelé registres. Le plan mémoire est découpé en 16 zones (bank) identiques de 256 octets. La sélection de la zone est réalisée par 4 bits du registre BSR (Bank Select Register). Les registres internes pour les fonctions spéciales (registres généraux et configuration des périphériques ? SFR qui signifie Special Function Registers) se situent aux adresses hautes [5], [9]. ? Mémoire EEPROM (Electrically Erasable Programmable Read Only Memory) Le PIC possède une zone EEPROM de 256 octets accessibles en lecture et en écriture par le programme. On peut y sauvegarder des valeurs, qui seront conservées même si l'alimentation est éteinte, et les récupérer lors de la mise sous tension. Leur accès est spécifique et requiert l'utilisation de registres dédiés. La lecture et l'écriture ne peut Commande de l'éclairage public et mesure de la température à base de PIC18F4550 11 s'exécuter que selon des séquences particulières [5]II. 12.2 Les timersLe timer est un élément important dans un PIC. En effet, cette ressource permettra de réaliser de nombreuses fonctions, telle que la temporisation, la génération de signaux PWM (appelée également Modulation de Largeur g d'Impulsion, MLI), ou encore les modes Compare ou Capture. Selon le type de PIC rencontré, on trouvera un certain nombre de timers qui seront pour certains associés à des ressources internes du PIC. Un timer est en fait un compteur incrémentant au rythme d'une horloge, et ceci en ayant la possibilité de pré positionner une valeur de départ. Certains timers pourront fonctionner en mode 8 bits, 16 bits ou 32 bits. Dans le PIC18F4550 il existe quatre timers (un timer de 8 bit et le reste de 16 bits) [10]. II. 12.3 Unité arithmétique et logique UAL et registre de travail WL'UAL (ou ALU en anglais) sera chargée d'effectuer toutes les opérations logiques et arithmétiques de base, C'est une ALU à 8 bits qui réalise les opérations arithmétique et logique entre l'accumulateur W et n'importe quel autre registre 'F' ou constante K. L'accumulateur W est un registre de travail 8 bits, il n'a pas d'adresse comme les autres SFR. Pour les instructions à deux opérandes, c'est toujours lui qui contient un des deux opérandes. Pour les instructions à un opérande, celui-ci peut être soit W soit n'importe quel registre F. Le résultat de l'opération peut être placé soit dans le registre de travail W soit dans le registre F [5]. II. 12.4 Les convertisseurs analogiques / numériquesPour utiliser un convertisseur analogique / numérique, il existe trois registres internes nommés ADCON0, ADCON1 et ADCON2, qui permettront de configurer et de sélectionner les différentes entrées analogiques (ADC pour Analog to DIgItal Converter) du PIC utilisé. Le paramétrage de ces trois registres conduit à choisir la façon dont se comporteront le ou les convertisseurs utilisés. Les entrées du PIC en relation avec le convertisseur analogique/ digital interne sont les broches AN0 à AN12. Les entrées analogiques (RA0 à RA5) transitent via le PORT A du PIC, les entrées AN5 à AN7 font partie du PORT E et les entrées AN8 à AN12 font partie du port B. Comme vous le voyez sur le schéma général, les bits CHS0 à CHS3 du registre ADCON0 permettent de sélectionner un canal (AN0 à AN12) qui sera en relation avec le convertisseur. Les bits VCFG0 et VCFG1 du registre ADCON1 permettent quant à eux de définir les références de tension (AN2 ou Vss pour Vref- et AN3 ou Vdd pour Vref +). Les bits PCFG0 à PCFG3 du même registre permettent de configurer chaque broche ANO à AN12 soit en entrée analogique soit en entrée / sortie logique. Le troisième registre ADCON2 permettra de sélectionner une Chapitre II Présentation du PIC 18F4550 Commande de l'éclairage public et mesure de la température à base de PIC18F4550 17 horloge pour le convertisseur analogique (bits ADCS0 à ADCS2), ainsi qu'un temps d'acquisition avant conversion (temps nommé TAD : bits ACQT0 à ACQT2), allant de 0 TAD à 20 TAD (soit 0 top d'horloge à 20 tops d'horloge), puis indiquera grâce au bit ADFM le format de la valeur de la conversion en sortie. Lorsqu'une conversion est lancée, un bit nommé GO/DONE du registre ADCON0 est forcée à «1». Dès que la conversion en cours est terminée, ce bit repasse à « 0 ». On réalise donc une boucle d'attente tant que la conversion n'est pas échue. Notez également que le bit ADON du même registre permet d'alimenter le convertisseur en 5 V : si ce bit est à « 0 », alors le convertisseur ne consomme aucun courant. Le résultat de la conversion sera stocké dans deux registres 8 bits nommes ADRESH et ADRESL. Le résultat étant sur 10 bits, il faudra choisir (ajustement à droite ou ajustement à gauche) les 10 bits parmi les 16 contenus dans ces deux registres, le bit ADFM du registre de configuration ADCON2 aura ce rôle (fig. II.5) [10].
Fig. II.5 Synoptique général du CAN pour le PIC18F4550 II. 12.4.1 Registre ADCON0Ce registre permettra [10] : ? de sélectionner un canal parmi 12 (bits CHSO-CHS3) ; ? d'alimenter le module convertisseur (bit ADON) ; ? d'avertir l'utilisateur lorsqu'une conversion en est cours (bit GO/DONE) ou de lancer une conversion. Commande de l'éclairage public et mesure de la température à base de PIC18F4550 18 Chapitre II Présentation du PIC 18F4550 La figure (fig. II.6) résume ces différentes fonctionnalités. Les bits CHS0 à CHS2 permettent de sélectionner le canal à choisir pour la conversion (exemple : 0101 ? canal 5, soit l'entrée AN5 du PIC). Le bit 1 (GO / DONE) permet de lancer une conversion ou bien de savoir si une conversion est en cours d'exécution (0 = fin de conversion). . Le bit 0 ADON permet l'alimentation du convertisseur : si ce bit est à 0, le convertisseur n'est pas alimenté.
bit 7 bit 0 bit 7-6 inutilisé: lire come `0' bit 5-2 CHS3:CHS0: bits de sélection de canal 0000 = Canal 0 (AN0) 0001 = Canal 1 (AN1) 0010 = Canal 2 (AN2) 0011 = Canal 3 (AN3) 0100 = Canal 4 (AN4) 0101 = Canal 5 (AN5) 0110 = Canal 6 (AN6) 0111 = Canal 7 (AN7) 1000 = Canal 8 (AN8) 1001 = Canal 9 (AN9) 1010 = Canal 10 (AN10) 1011 = Canal 11 (AN11) 1100 = Canal 12 (AN12) 1101 = non implémenté 1110 = non implémenté 1111 = non implémenté bit 1 GO/DONE: bit d'état conversion Quand ADON = 1: - 1 = A/D conversion en cours - 0 = A/D conversion terminée bit 0 ADON: bit de mise en service - 1 = A/D Module convertisseur en service - 0 = A/D Module convertisseur hors service Fig. II.6 Registre ADCON0 II. 12.4.2 Registre ADCON1Ce registre (fig. II.7) permettra [10] : ? de définir les tensions de référence V- et V+, ces tensions pourront être l'entrée AN2 ou AN3, ou bien le +Vdd et le Vss de l'alimentation (bits VCFG1 et VCFG0) ; ? de configurer toutes les broches du port A soit en entrée logique soit en entrée analogique avec des options pour la tension de référence (bits PCFG0-PCFG3). Chapitre II Présentation du PIC 18F4550
bit 7 bit 0 bit 7-6 inutilisé: lire come `0' bit 5 VCFG1: bits de configuration de la référence de tension Vref - - 1 = Vref - (AN2) - 0 = AVss bit 4 VCFG0 : bit de configuration de la référence de tension Vref + - 1 = Vref + (AN3) - 0 = AVdd Bit 3-0 PCFG3 :PCFG0 :bit de configuration des entrées du convertisseur bit 1 GO/DONE: bit d'état conversion Quand ADON = 1: - 1 = A/D conversion en cours - 0 = A/D conversion terminée bit 0 ADON: bit de mise en service - 1 = A/D Module convertisseur en service - 0 = A/D Module convertisseur hors service
A = entrée Analogique D = entrée / sortie Digitale Commande de l'éclairage public et mesure de la température à base de PIC18F4550 19 Fig. II.7 Registre ADCON1 II. 12.4.3 Registre ADCON2Ce registre (fig. II.8) permettra [10] : ? de définir le format de donnée pour la valeur issue de la conversion analogique/numérique (bits ADFM) ; ? de configurer le choix de l'horloge utilisée par le convertisseur (bits ADCS0 à ADCS2) ; ? de configurer un temps d'attente avant la conversion et d'obtenir ainsi une à éventuelle stabilisation de la tension à mesurer (bits ACQT0 à ACQT2). Chapitre II Présentation du PIC 18F4550
bit 7 bit 0 bit 7 ADFM: bit de configuration du format de sortie 1 = justification à droite 0 = justification gauche bit 6 Inutilisé bit 5-3 ACQT2:ACQT0: bits de sélection des temps d'acquisition 111 = 20 TAD 110 = 16 TAD 101 = 12 TAD 100 = 8 TAD 011 = 6 TAD 010 = 4 TAD 001 = 2 TAD 000 = 0 TAD bit 2-0 ADCS2:ADCS0: bits de sélection de l'horloge pour la conversion 111 = FRC (Horloge provenant de l'oscillateur RC interne) 110 = FOSC/64 101 = FOSC/16 100 = FOSC/4 011 = FRC (Horloge provenant de l'oscillateur RC interne) 010 = FOSC/32 001 = FOSC/8 000 = FOSC/2 Fig. II.8 Registre ADCON2 II.14 ConclusionCe chapitre est un portail pour notre réalisation et conception matérielle.Ca nous a permis de maitriser les options de notre PIC et ses caractéristiques afin de les exploiter d'une manière correcte.
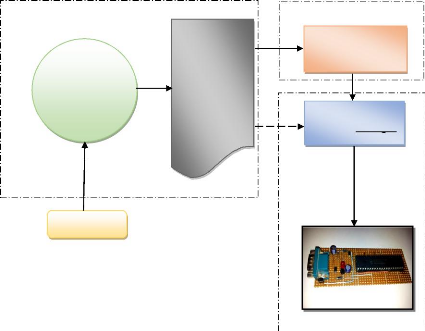
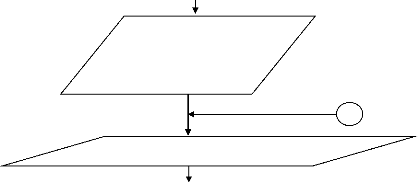
Chapitre IIIProgrammation de PIC18F4550 Chapitre III Programmation de PIC18F4550 III. 1 IntroductionLa programmation des microcontrôleurs PIC est supportée par plusieurs langages de programmation tel que : MikroC for PIC, MPLAB, MikroBasic PRO for PIC, HI-TECH C for PIC, flowcode...etc. Dans notre projet nous avons opté pour le compilateur de MIKRO C qui est un compilateur en langage C (langage évolué) et qui permet d'intégrer certaines routines en assembleur. Ce choix est à la fois un choix personnel et un choix technologique parce que il est basé sur le langage C et est facile et en douceur. III. 2 Etapes de développement du programmeL'élaboration d'un programme est un travail qui se fait en plusieurs étapes (Fig. III.1) : La première étape : L'algorithme La deuxième étape : Ecriture du programme La troisième étape : Simulation du programme La quatrième étape : Transfert du programme vers PIC
(1) (2) Compilateur Algorithme MikroC :100000001C EF08F0FFFFF FFF1FC000F0 000E016EA5 Fichier *.hex (3) Programmeur de PIC Logiciel de Logiciel de Fig. III.1 : Etapes de développement du programme
Chapitre III Programmation de PIC18F4550 III. 3 Présentation du MikroC :Le « MikroC » est un compilateur pour PIC Conçu par la société « Mikroelektronika », le compilateur C nouvelle génération "MikroC" pour microcontrôleurs PIC bénéficie d'une prise en main très facile. Il comporte plusieurs outils intégrés (mode simulateur, terminal de communication, gestionnaire 7 segments, analyseur statistique, correcteur d'erreur, explorateur de code...) ; Il a une capacité à pouvoir gérer la plupart des périphériques rencontrés dans l'industrie (Bus I2C, 1Wire, SPI, RS485, Bus CAN, cartes compact Flash, signaux PWM, afficheurs LCD et 7 segments...) de ce fait il est un des outils de développement incontournable et puissant [9]. Il est conçu pour fournir les solutions les plus faciles que possibles pour des applications se développant pour les systèmes à microcontrôleur. Il contient un large ensemble de bibliothèques de matériel, de composant et la documentation complète [11].
Fig. III.2 : Interface du logiciel MikroC III. 3. 1 Création d'un projetLe processus de création d'un nouveau projet est vraiment très simple. Sélectionnez New Project (Nouveau Projet) de puis le menu Project (Projet), comme indiqué sur (Fig. III.3).
Chapitre III Programmation de PIC18F4550 Fig. III.3 : Création d'un projet Une nouvelle fenêtre apparaîtra. Comme indiqué sur (Fig. III.4), il y a plusieurs champs à renseigner comme le nom du projet, l'emplacement du projet, sa description, l'horloge et les options du composant. Le tableau device flags (options composant) est utilisé pour la configuration des paramètres du microcontrôleur.
Fig. III.4 : Les configurations de projet Après ça, une nouvelle fenêtre (Fig. III.5) vide s'affiche pour écrire notre programme
Chapitre III Programmation de PIC18F4550 Fig. III.5 : Fenêtre de saisie de programme III. 3. 2 Quelques notions de programmation en C sous MikroC :La saisie d'un programme en `C' répond pratiquement toujours à la même structure. On peut noter que [12] : - Le symbole «#» est suivi d'une directive. - Le symbole «//» est suivi d'un commentaire, ou bien «/*» indiquant le début d'un commentaire et «*/» indiquant sa fin. - Chaque ligne d'instruction se termine par un «;». - Le début d'une séquence est précédé du symbole «{». - La fin d'une séquence est suivie du symbole «}». - La notation des nombres peut se faire en décimal de façon normale ou en hexadécimal avec le préfixe «0x» ou encore en binaire avec le préfixe«0b». III. 3. 3 Les instructions de MikroCNous allons identifier uniquement les fonctions et les instructions les plus importantes que nous avons utilisées dans notre programme. a. La boucle `for' :Elle permet de contrôler le nombre de fois à exécuter un bloc d'instructions. Dans la syntaxe de cette boucle on trouve : la valeur initiale du compteur, ça valeur finale est la valeur avec laquelle il doit être incrémenté (ou décrémenté) chaque fois que le bloc d'instructions est exécuté [10].
for (i=0 ;i=10 ;i++) //i est le compteur { portd = portd++; // incrémenté PORTD } Chapitre III Programmation de PIC18F4550 Peut-on utiliser la boucle 'for' comme une boucle infinie comme suit : for ( ;; )// boucle infinie { portd = portd++; // incrémenté PORTD } B. Opérateur de condition `if / else'Cet opérateur permet d'exécuter une partie du programme sous certaines conditions. La syntaxe de cet opérateur est la suivante [10] : if (condition) { séquences d'instructions à exécuter si la condition est vérifiée } else { séquences d'instructions à exécuter si la condition n'est pas vérifiée } C. Instruction goto :La directive goto permet de brancher directement à n'importe quel endroit de la fonction courante idéntifiée par une étiquette. Une étiquette est un idéntificateur suivi du signe »:». Exemple : Start1 : for ( ;; )// boucle infinie { portd = portd++; // incrémenté PORTD DELAY_ms(500); // attendre une demi-seconde If (portc.f1==0) goto Start2 ; } Start2 : for ( ;; )// boucle infinie { portd = portd--; // décrémenté PORTD DELAY_ms(500); // attendre une demi-seconde If (portc.f0==0) goto Start1 ; }
Chapitre III Programmation de PIC18F4550 III. 3. 4 Les bibliothèques du MikroCMikroC fournit quelques bibliothèques et nous avons utilisé uniquement les bibliothèques suivantes : Tableau. III.1 : Les bibliothèques du MikroC Bibliothèque Les fonctions La description
Chapitre III Programmation de PIC18F4550 III. 3. 5 Bus I2CIII. 3. 5. 1 Présentation de Bus I2CLe bus" I2C a été inventé pour simplifier la communication entre des composants divers dont le sigle signifie Inter Integrated Circuit ce qui donne IIC et par contraction I2C.Le protocole est initialement proposé par Philips1980 mais adopté de nos jours par de très nombreux fabricants. C'est un bus de communication de type série [13]. Chez certains constructeurs, ce bus est parfois nommé sous le nom de TWI (Two Wire Interface). Ce bus n'utilise que 3 fils : - un signal de données (SDA9) - un signal d'horloge (SCL) - un signal de référence électrique (masse) III. 3. 5. 2 Principe de fonctionnement du bus I2CPour les composants voulant communiquer en I2C il suffit de lier ces 3 fils. Le fonctionnement du bus I2C est assez simple malgré que son protocole puisse sembler complexe. La communication I2C repose sur l'échange entre un maître et des esclaves par adressage. C'est-à-dire que chaque composant dit esclave possède une adresse spécifique sur 7bits. C'est le composant maître qui gère la communication. Il envoie les signaux de données et le signal d'horloge. Généralement le maître est un composant dit microcontrôleur. Le rôle du signal d'horloge SCL est de rythmer l'envoi des données. Chaque bit du signal de données SDA sera envoyé à chaque changement d'état du SCL (Fig. III.6).
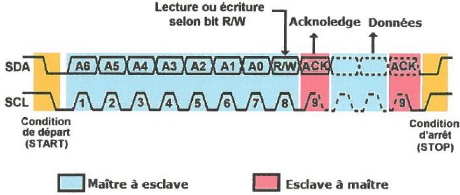
Fig. III.6 : le chronogramme des lignes SDA et SCL Au début d'une communication, il faut s'assurer que le SDA et SCL sont en état de repos, soit un niveau logique 1 (Fig. III.7). Ensuite le maître envoie sur le bus I2C, l'adresse de l'esclave avec qui il veut communiquer. On dit qu'il envoie les bits d'adressage. Suite à cela le maître indique le mode d'action (R/W) c'est adire le maître indique s'il veut écrire ou lire les données de l'esclave (0 pour écriture, 1 pour la lecture).
Chapitre III Programmation de PIC18F4550
(0 pour écriture, 1 pour la lecture) Commande de l'éclairage public et mesure de la température à base de PIC18F4550 28 Fig. III.7 : le chronogramme de communication I2C L'esclave possédant l'adresse indiqué répond par un « Acknowledge » (ACK). C'est un bit dit d'acquittement pour indiquer qu'il a bien reçu les instructions du maître. Ce bit est symbolisé par un forçage de l'esclave à mettre la ligne SDA à un niveau logique 0. L'acquittement reçu par le maître, celui-ci envoyé alors les données à l'esclave qui acquittera à nouveau pour confirmer la réception. Le maître peut alors envoyer autant de donnée qu'il veut sur un même esclave qui acquittera à chaque opération. Pour finir, un maître peut communiquer avec plusieurs esclaves à condition de paramétrer les adresses de tous les esclaves. Il devra alors indiquer, à chaque changement d'esclave, l'adresse du nouveau esclave avec qui il veut communiquer [13]. III. 3. 5. 3 Bus I2C et MikroCMikroC fournit une bibliothèque prête du bus I2C (Tableaux 3.1), nous utilisons cette bibliothèque pour communiquer entre le maitre (PIC18F4550) et l'esclave (DS1307). L'exemple suivant montre comment écrire des fonctions de lire et d'écrire en l'esclave DS1307 avec les commentaires. a. Fonction d'écriture
Chapitre III Programmation de PIC18F4550 Un exemple de l'utilisation de cette fonction :
b. Fonction de lecture
Un exemple de l'utilisation de cette fonction : minute=read_ds1307(1); // lire minute hour=read_ds1307(2); // lire heur dminute=Bcd2Dec(minute);dhours=Bcd2Dec(hour);// Conversions de BCD à décimal
Chapitre III Programmation de PIC18F4550 Commande de l'éclairage public et mesure de la température à base de PIC18F4550 23 III. 3. 6 Le convertisseur analogique numérique et MikroCNous avons utilisés le convertisseur analogique numérique (CAN) intégré au PIC, ce CAN se trouve sur le port A et le port E, on doit l'initialiser en entrées analogiques et pour cela on utilise la fonction suivante : val = Adc_Read(0) ; // lire la valeur analogique du canal 0 Le CAN de PIC18F4550 est de 10 bits donc les valeurs de val entre 0 et 1023 (0=val=1023) pour que la valeur 0 représente tension 0 volt et la valeur 1023 représente la tension maximum d'entrée (tension de référence Vreff+). La tension analogique donnée par : Vanlogique = pas × val Le pas donnée par : pas = Vreff / 1023 Exemple : Pour lire la tension analogique de sortie du capteur de température LM35 (l'explication de LM35 en chapitre 4) avec tension de référence (Vreff+ = 1068 mV) nous allons écrire les instructions suivantes : int val, tempinC ; ADCON1 = 0b00011001 ; // Configure les entrée analogique et Vref du port A TRISA = 0xFF ; // PORTA comme entrée val = ADC_Read(0) ; // lire la valeur analogique du canal 0 val = val*0.001068;// La tension analogique du capteur tempinC = val/0.01 ; // 0.01 est facteur relatif de sensibilité du capteur //0,01 volt dans tous les degrés Celsius III. 4 Présentation du logiciel ISIS de Proteus :Isis est un éditeur de schémas qui intègre un simulateur analogique / logique ou mixte. Toutes les opérations se passent dans cet environnement, aussi bien la configuration des différentes sources que le placement des sondes et le tracé des courbes [14]. Dans cette section nous allons commencer par la présentation de la fenêtre du logiciel ISIS (Fig. III.8).
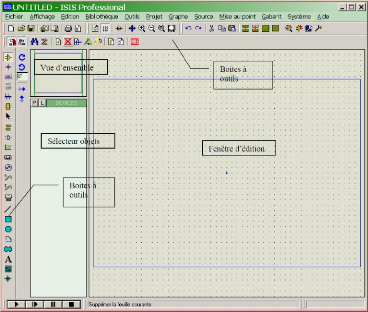
Chapitre III Programmation de PIC18F4550 Fig. III.8 : Interface du logiciel ISIS a-Fenêtre d'ensemble (Vue d'ensemble) :Le cadre en bleu délimite l'espace de travail tel qu'il a été défini par la commande 'Définir taille des feuilles' du menu 'système' Le cadre en vert délimite La zone de travail, c'est à dire la partie du schéma visible dans la fenêtre principale. - Vous pouvez déplacer cette zone de travail en pointant la souris sur la zone désirée de la fenêtre d'ensemble et en effectuant un clic gauche. - Vous pouvez redéfinir la zone de travail dans la fenêtre d'ensemble en appuyant sur la touche majuscule 'shift 'du clavier, associée au déplacement de la souris en maintenant appuyé le bouton gauche. [15] b-Fenêtre d'édition :La surface la plus grande de l'écran s'appelle "Fenêtre d'édition" et se comporte comme une fenêtre de dessin. C'est là que vous placez et câblez les composants [14]. c-La boite à outils :Elle est composée d'un ensemble d'icônes dont les fonctions seront détaillées ultérieurement et d'un sélecteur d'objet utilisé pour choisir les boîtiers, le style des pastilles, des traces, des traversées, etc. [15]
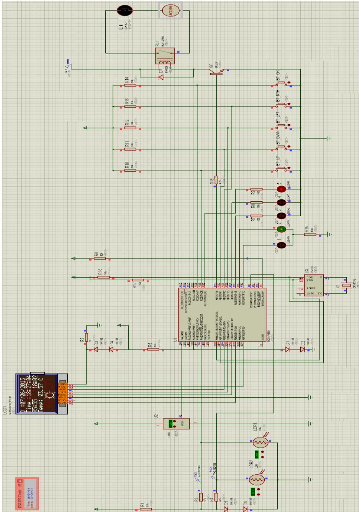
Chapitre III Programmation de PIC18F4550 III. 4.1 Simulation par ISISPour le dessin du schéma électrique de notre projet on utilisée le logiciel ISIS pour le simuler comme indique la figure (Fig. III.9).
Fig. III.9 : Le logiciel ISIS 7 en mode simulation du projet
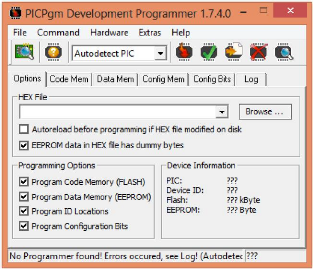
Chapitre III Programmation de PIC18F4550 III. 5 Transfert du programme vers PICIl existe de nombreux logiciels utilisés dans transfert du programme vers PIC comme IC-PROG, PICPgm, JDM for PIC etc. Dans notre cas nous allons utilisons PICPgm parce que il est plus simple et très facile, la figure suivante (Fig. III.10) représente l'interface du logiciel PICPgm.
Fig. III.10 : Interface du logiciel PICPgm III. 5.1 Comment utiliser PICPgm ?L'utilisation du logiciel est plus simple, premièrement nous devons configurer les ports de l'ordinateur et le type de programmateur utilisé et connecter le programmateur par l'ordinateur. Deuxième étape est sélectionné le fichier de programme *.hex par bouton « Browse » et la
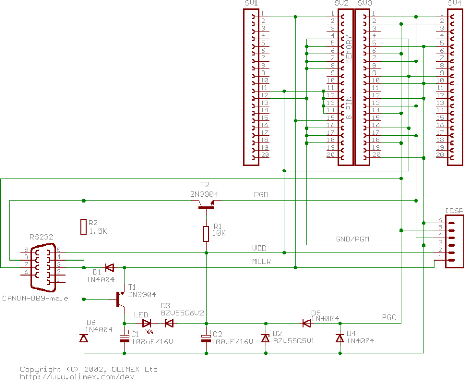
III. 5.2 Programmateur proposé :Il existe plusieurs programmateurs de PIC, nous construisons un programmeur JDM trié simple « à bas deux transistors, une résistance, six diodes et deux condensateurs » (Fig. III.11) qui peut programmer le PIC12, PIC16 et les microcontrôleurs PIC18 et certaines familles populaires EEPROM 24C. Le circuit est connecté au PC via un port série et aucune alimentation externe n'est nécessaire.
Chapitre III Programmation de PIC18F4550 Fig. III.11 : le schéma du Programmateur de PIC [16]
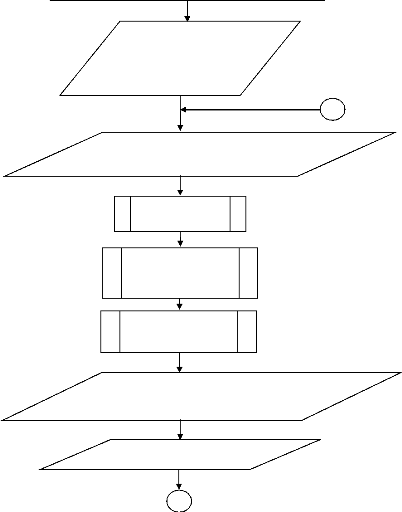
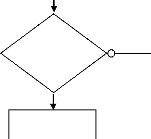
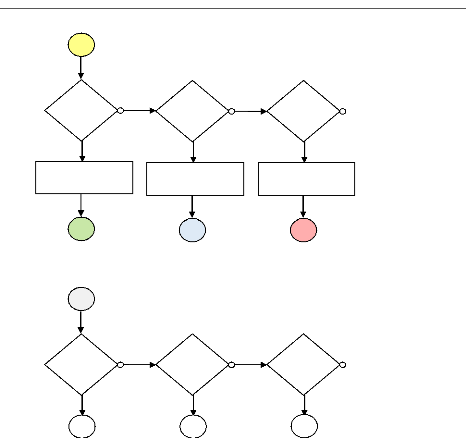
Chapitre III Programmation de PIC18F4550 III. 6 Organigramme de programme :
Début Déclarations des variables Initialisations des portes Initialisation de bus I2C Initialisation de l'afficheur LCD Lire les paramètres enregistrés dans la mémoire de système « EEPROM » (Latitude, Longitude, fuseau horaire, sensibilités des capteurs, Modes)
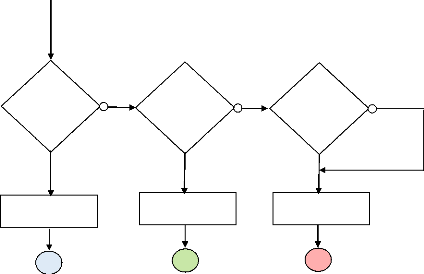
Oui Modes = 2 Oui Oui No Modes No Modes No = 1= 0 Aller au mode 3 Aller au mode 2 Aller au mode 1 1 3 2
Chapitre III Programmation de PIC18F4550
1
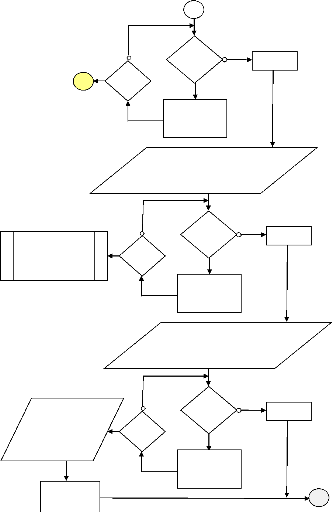
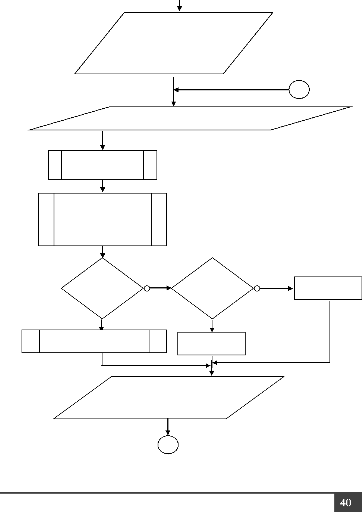
4 Afficher les données sur LCD (la date et le temps, le temps du lever et du coucher du soleil, la température) BT_OK (Lire l'état de bouton OK) Calculer la température Calculer le temps du lever et du coucher du soleil et le temps du crépuscule civil du matin et du soir CRC (Commande d'un R1 Lire la date et le temps de model RTC par bus I2C Secondes, minutes, heures, jours, moins, années. - LED_Rouge?1 - LED_Verte?0 - LED_Bleu?0 - Effacer l'écran LCD Chapitre III Programmation de PIC18F4550 Commande de l'éclairage public et mesure de la température à base de PIC18F4550
BT_UP (Lire l'état de bouton haut) BT_DW (Lire l'état de bouton bas) BT_UP =0 Oui - m--m+1 - Un délai de 1 seconde m--0 R No Un délai de No m= 3 - Effacer l'écran LCD - Afficher (À propos de l'appareil) Oui m--0 No S m= 3 Oui - m--m+1 - Un délai de 1 seconde No BT_OK = 0 4 Oui No No BT_RT= 0 m--0 m= 3 Oui Oui Réglage des BT_RT (Lire l'état de bouton droit) BT_LT (Lire l'état de bouton gauche) - m--m+1 - Un délai de 1 seconde Commande de l'éclairage public et mesure de la température à base de PIC18F4550
Chapitre III Programmation de PIC18F4550
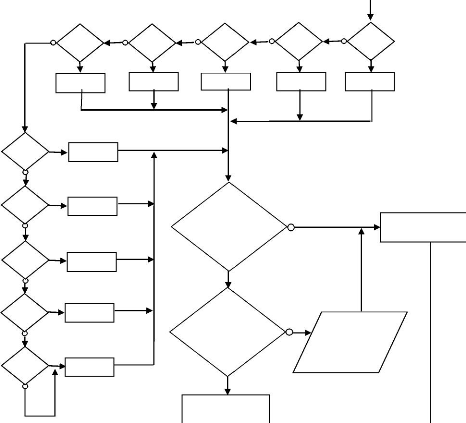
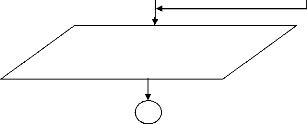
Début CRC CRC (Commande d'un Relais en utilisant des Capteurs optiques)
No ntc=20 ntc=50 ntc=10 ntc=30 ntc=40 No No No No No No Oui Oui Oui Oui Oui nc?0.45 ntc=60 nc?0.25 nc?0.20 nc?0.30 nc?0.35 nc?0.40 Oui nc?0.55 ntc=70 Oui No Relais?1 Allumer l'éclairage VLDR2 = nc VLDR1 = nc nc?0.65 ntc=80 Oui Oui Oui No nc?0.70 ntc=90 No No Oui Afficher Erreur No nc?0.75 ntc=100 Oui Relais?0 Éteindre l'éclairage
Fin CRC Lire le paramètre ntc (sensibilités des capteurs) de la mémoire de système « EEPROM » Lire les tensions (VLDR1 et VLDR2) de des capteurs optiques en utilisant le convertisseur analogique numérique (ADC) Commande de l'éclairage public et mesure de la température à base de PIC18F4550 22
Calculer la température
Lire la date et le temps de model RTC par bus I2C - LED_Rouge?0 - LED_Verte?1 - LED_Bleu?0 - Effacer l'écran LCD R2 Calculer le temps du lever soleil et le temps du (T3) et du soir (T4)
Chapitre III Programmation de PIC18F4550
2 Relais?0 Éteindre l'éclairage
Temps = T3 Et Temps = T4 No Oui Relais?1 Allumer l'éclairage
Afficher les données sur LCD BT_OK (Lire l'état de bouton OK) 4 Chapitre III Programmation de PIC18F4550
3 Commande de l'éclairage public et mesure de la température à base de PIC18F4550
Commande de l'éclairage public et mesure de la température à base de PIC18F4550 Calculer le temps du lever soleil et le temps du (T3) et du soir (T4) No Temps < T3 No Et Temps = T4 Relais?0 Éteindre l'éclairage T3<Temps < T1 Ou T2<Temps < T4 Oui CRC (Commande d'un relais en CRC utilisant des capteurs optiques) Oui Relais?1 Allumer l'éclairage Afficher les données sur LCD BT_OK (Lire l'état de bouton OK) 4 Calculer la température R3 Lire la date et le temps de model RTC par bus I2C - LED_Rouge?0 - LED_Verte?0 - LED_Bleu?1 - Effacer l'écran LCD
R Modes =0 Modes =2 No Modes No =1 Oui Oui Oui R1 R2 R3 Chapitre III Programmation de PIC18F4550 S Modes =0 Modes =2 No Modes No =1 Oui Oui Oui Aller au mode 2 2 Aller au mode 3 3 Aller au mode 1 1 III. 7 Conclusion :Afin d'atteindre l'objectif principal du projet, nous avons étudié en détail les trois étapes (programmation, simulation, transfert), après avoir écrit le programme et la vérification de son fonctionnement par le logiciel de simulation. Nous avons envoyé le programme vers le PIC18F4550 pour que nous nous utilisions dans la réalisation pratique de notre système.
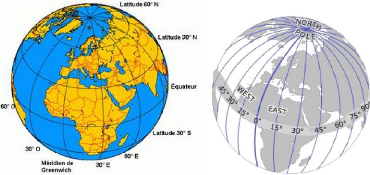
Chapitre IVConceptions et réalisation de système Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 24 IV. 1 IntroductionDans ce chapitre nous présentons une description détaillée de la solution adoptée pour répondre aux spécifications de notre cahier de charge et en abordant la conception détaillée de chaque partie du système afin d'obtenir une schématisation complète et précise. IV. 2 Etude théoriqueNotre système de commande est basé sur trois idées, la première idée se base sur des capteurs optiques, la deuxième idée se base sur le calcul de l'heure du lever et du coucher du soleil, la troisième idée se base sur les deux (temps et des capteurs). L'idée principale de notre appareil est basé sur la lecture des états des capteurs optique et calculer l'heure du lever et coucher du Soleil, ce dernier est le noyau de l'appareil. L'heure du lever et du coucher du Soleil varie en fonction du jour et de l'endroit. Nous ne parlerons pas trop de détails des calculs astronomiques, mais nous aborderons seulement quelques concepts importants comme les coordonnées terrestres et les équations utilisés dans les calculs. IV. 2.1 Les équations de l'algorithme utilisé dans les calculsPlusieurs algorithmes de calcul l'heure du lever et du coucher du soleil sont disponibles sur l'internet. Nous allons utiliser un de ces algorithmes tel qu'il est simple et précis en termes de résultats et facile à mettre en oeuvre en termes de programmation. Avant de commencer à écrire l'algorithme, nous devrions connaître certains termes importants. IV. 2.1.1 Les coordonnées géographiquesPar coordonnées géographiques (ou encore « repères géographiques ») d'un lieu, on entend la latitude, la longitude et le niveau de la mer. Pour se repérer à la surface de la planète. Ce sont les coordonnées angulaires qui permettent le repérage d'un point sur la terre. La position d'un point M à la surface de la Terre peut être définie par sa latitude Ø, angle de sa normale à l'ellipsoïde terrestre avec le plan de l'équateur, et par sa longitude X, angle dièdre du méridien du point et d'une méridienne origine [17], [18]. a. La longitude Angle dièdre formé, en un point donné de la surface terrestre, par le méridien du lieu avec le méridien de Greenwich, et compté de 0 à #177; 180°, 12 h à partir de cette origine, positivement vers l'ouest, négativement vers l'est [18]. Chapitre IV Conceptions et réalisation de système b. La latitude Angle formé, en un point donné de la surface terrestre, par la verticale du lieu avec le plan de l'équateur, et compté de 0 à #177; 90° à partir de l'équateur, positivement vers le nord, négativement vers le sud [18].
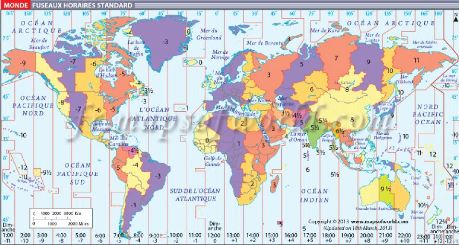
Fig. IV.1 : Les coordonnées géographiques (latitude et longitude) IV. 2.1.2 Les fuseaux horairesLes fuseaux (Fig. IV.2) horaires sont des divisions géographiques du globe terrestre tous les 15° de longitude, commençant à Greenwich en Angleterre, créées pour aider les gens à déterminer l'heure qu'il est partout dans le monde. [19]
Fig. IV.2 : Carte du monde des fuseaux horaires [20]
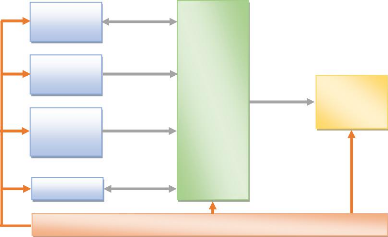
Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 22 IV. 2.1.3 CrépusculeLe crépuscule est l'intervalle de temps au soir entre le coucher du Soleil et le moment où le Soleil se situe à un certain nombre de degrés sous l'horizon. Le matin, le crépuscule est l'intervalle de temps entre le moment où le Soleil est encore à un certain nombre de degrés sous l'horizon et le lever du Soleil. Les phases du crépuscule généralement divisé en trois phases (crépuscule civil, crépuscule nautique, crépuscule astronomique). Dans le cas du crépuscule civil, le centre du disque solaire doit se trouver à 6° sous l'horizon. Pour obtenir ce qu'on appelle le crépuscule nautique, le Soleil doit se situer à 12° sous l'horizon. Pour le crépuscule astronomique, il faut 18°, mais parfois 15° suffisent aussi car à ce moment-là, il fait pratiquement déjà nuit. [21], [22] ? Crépuscule civil Le crépuscule civil est la période où le centre du Soleil est situé à moins de 6° sous la ligne d'horizon. Il subsiste encore suffisamment de lumière pour que la plupart des activités ne nécessitent pas de sources de lumières artificielles [22]. IV. 2.1.4 Les équationsLes entrées de cet algorithme sont comme suit : le jour (day), le mois (month) et l'année (year), latitude (latitude) et longitude (longitude), le fuseau horaire (localOffset). [23] Calculer le jour de l'année N1 = floor(275 * month / 9) N2 = floor((month + 9) / 12) N3 = (1 + floor((year - 4 * floor(year / 4) + 2) / 3)) N = N1 - (N2 * N3) + day - 30 Convertir la longitude vers une valeur de l'heure et calculer un temps approximatif lngHour = longitude / 15 Si l'heure du lever du soleil est nécessaire : t = N + ((6 - lngHour) / 24) Si l'heure du coucher du soleil est nécessaire : t = N + ((18 - lngHour) / 24) Calculer l'anomalie moyenne du Soleil M = (0.9856 * t) - 3.289 Déterminer la vraie longitude du Soleil L = M + (1.916 * sin(M)) + (0.020 * sin(2 * M)) + 282.634 Calculer l'ascension droite du Soleil RA = atan(0.91764 * tan(L)) La valeur de l'ascension droite doit être dans le même quadrant que L Lquadrant = (floor( L/90)) * 90 Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 24 RAquadrant = (floor(RA/90)) * 90 RA = RA + (Lquadrant - RAquadrant) La valeur de l'ascension droite doit être convertie en heures RA = RA / 15 Calculer la déclinaison du Soleil sinDec = 0.39782 * sin(L) cosDec = cos(asin(sinDec)) Calculer l'angle horaire local du Soleil zenith = 90 cosH = (cos(zenith) - (sinDec * sin(latitude))) / (cosDec * cos(latitude)) Finalement calcul de H et de les convertir en heures Si l'heure du lever du soleil est nécessaire : H = 360 - acos(cosH) Si l'heure du coucher du soleil est nécessaire : H = acos(cosH) H = H / 15 Calculer le temps moyen local T = H + RA - (0.06571 * t) - 6.622 Calculer le Temps universel coordonné UTC UT = T - lngHour UT potentiellement doit être ajusté dans l'intervalle [0,24) en ajoutant / soustrayant 24 Convertir la valeur UT à fuseau horaire local de latitude / longitude localT = UT + localOffset Convertir la valeur localT à heures et minutes heures = floor(localT) minutes = floor(localT - heure)*60 Remarque : la suite des calculs est la même que pour le crépuscule civil, il suffit de remplacer zenith = 90 dans la formule ci-dessus par respectivement zenith = 96. En fait, la lumière au début du crépuscule civil est peu clair, après quelques minutes il devient une bonne lumière, donc pour obtenir de bons résultats il va utiliser une valeur entre temps de crépuscule civil et l'heure de lever du soleil (zenith = 93). IV. 2 Les différents blocs de la carteDans notre système de commande il y a plusieurs unités comme l'indique la figure ci-dessous (Fig. IV.3), de telle sorte que chaque unité joue un certain rôle, nous allons décrire chaque unité séparément en détail. Chapitre IV Conceptions et réalisation de système
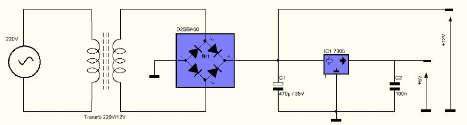
Les capteurs de lumière Le capteur de Température L'interface utilisateur Horloge L'Alimentation L'unité de contrôle Interface Commande de l'éclairage public et mesure de la température à base de PIC18F4550 24 Fig. IV.3 : Les différents blocs de système IV. 2.1 L'AlimentationPour alimenter chaque bloc. Nous devons donner une tension stable 5 et 12 volts (pas stable), pour cela nous vous proposerons le montage suivant :
Fig. IV.4 : schéma de l'alimentation classique IV. 2.1.1 Principe du montage Un transformateur nous fournit une tension alternative de 12v qui est redressée par le pont de diodes et filtrée par le condensateur C1. Ensuite cette tension est régulée à 5v par un régulateur de tension de type LM7805 qui nous fournit une tension positive de 5V avec un courant maximum de 1A, la capacité sert à filtrer les bruits, ses valeur sont données par le constructeur du régulateur. Chapitre IV Conceptions et réalisation de système IV. 2.2 Le capteur de lumière (LDR) IV. 2.2.1 DéfinitionUne photorésistance (Fig. IV.5) est un composant électronique dont la résistivité varie en fonction de la quantité de lumière incidente. On peut également la nommer résistance photo-dépendante (light-dependent resistor (LDR)) ou cellule photoconductrice [24].
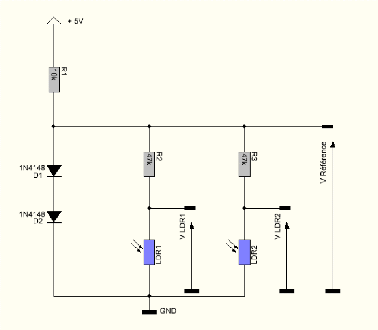
Commande de l'éclairage public et mesure de la température à base de PIC18F4550 24 Fig. IV.5 : Symbole et Capteur LDR IV. 2.2.2 Principe de fonctionnement Une photorésistance est composée d'un semi-conducteur à haute résistivité. Si la lumière incidente est de fréquence suffisamment élevée, les photons absorbés par le semi-conducteur donneront aux électrons liés assez d'énergie pour sauter dans la bande de conduction, les électrons libres (avec leurs trous d'électron) ainsi produits abaissant la résistance de l'ensemble [24]. Dans notre carte nous avons utilisée deux capteurs de lumières (LDR 1 et LDR 2), Le premier capteur (LDR 1) qui est considéré comme un capteur principal, et la seconde (LDR 2) fonctionne comme un capteur de réserve et complémentaire du premier capteur. LDR est un capteur passif donc nous nous devons utiliser une interface entre le capteur et le PIC18F4550 pour présenter la variation de lumière (ou d'ombre) sous la forme d'un signal électrique. La figure suivant (Fig. IV.6) représente un circuit simple composé de trois résistances et deux diodes.
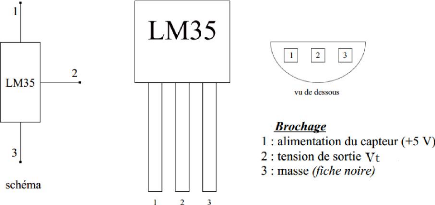
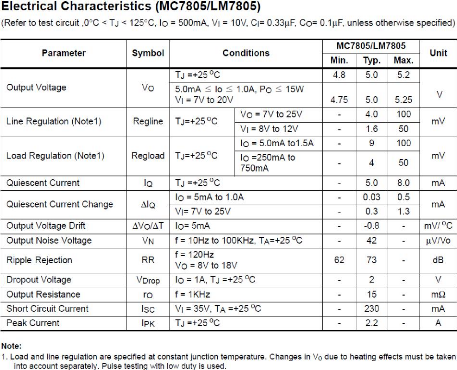
Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 24 Fig. IV.6 : schéma de l'interface des capteurs de lumières IV. 2.2.3 Principe du montage Le principe de ce circuit est très simple il est basé sur le diviseur de tension (Un circuit électronique constitué de deux résistances en série qui permet de diviser une tension d'entrée). Dans ce cas, nous allons utiliser deux circuits de diviseurs de tension. La tension de sortie du diviseur de tension (V LDR1 et V LDR2) donnée par : V LDR1 = VRéférence x LDR1 / (LDR1 + R2) V LDR2 = VRéférence x LDR2 / (LDR2 + R3) Si LDR1 = Valeur maximum ? V LDR1 VRéférence Si LDR1 = Valeur minimum ? V LDR1 0 Si LDR2 = Valeur maximum ? V LDR2 VRéférence Si LDR2 = Valeur minimum ? V LDR2 0 La tension de référence (VRéférence) est égale à la tension entre les deux diodes et la masse (GND) donnée par : VRéférence = VD1 + VD2 VD1, VD2 : La tension de seuil de la diode (0.62V dans le cas 1N4148) Le rôle de la résistance R1 est de limiter la circulation de courant dans le circuit et pour diminuer le courant dans les deux diodes (D1, D2 : Imax = 200mA pour 1N4148). Chapitre IV Conceptions et réalisation de système IV. 2.3 Le capteur de TempératureLe capteur de température est un dispositif qui permet de transformer une grandeur physique (Température) en une grandeur électrique (tension ou courant).Comme le capteur de lumière il existe deux type du capteur (actif et passif), dans notre cas nous allons utiliser un capteur du type actif (Circuit intégré LM35). IV. 2.3.1 Le capteur LM35Le capteur LM35 est un capteur de température où la tension de sortie est linéairement proportionnelle à la température en Celsius centigrade. Ce capteur ne nécessite pas de calibrage externe pour fournir une précision de #177; °C sur
une gamme de température de -55°C à IV. 2.3.2 Brochage du LM35Le capteur LM35 est commercialisé dans boiter 3 broches classiques, comme illustré dans la figure IV.7
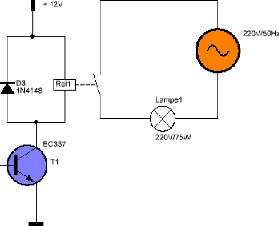
Commande de l'éclairage public et mesure de la température à base de PIC18F4550 24 Fig. IV.7 : Brochage du LM35 IV. 2.4 Interface commande puissanceDans tous les pic la tension max de sortie est égal a 5V, cette tension n'est pas suffisante pour alimenter une lampe de haute tension (220V), pour cette raison on a utilisé une interface entre la lampe et le pic, il est basé sur un relais piloté via un transistor de commande comme illustré dans la figure IV.8
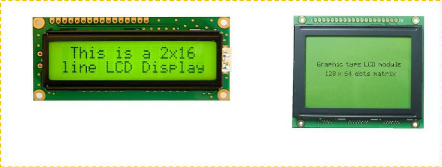
Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 45 Fig. IV.8 : schéma de l'interface de puissance Le transistor permet de commander le relais en tout ou rien à partir du signal V Relais. Le relais Rel1 comprend entre ses bornes un bobinage que l'on peut assimiler à une inductance L en série avec une résistance R. La diode D3 est une diode de roue libre qui assure la continuité du courant dans l'inductance du relais au blocage du transistor. Sans la diode D3 une surtension destructrice pour le transistor se produirait. Le transistor BC337 fonctionne en régime de commutation quand son courant base est soit très faible (Transistor bloqué) soit très intense (Transistor saturé). Les deux cas donnée par : Si V Relais = 0 ? le transistor est bloqué ? l'interrupteur est ouvert Si V Relais = 5 ? le transistor est saturé ? l'interrupteur est fermé IV. 2.5 L'interface utilisateurL'interface utilisateur est le médiateur entre l'utilisateur et le microcontrôleur PIC18F4550 dans notre carte, Il est constitué de deux parties (l'afficheur LCD, Le clavier «les boutons poussoirs et les LED »). Ces trois parties capables de saisir les données et de lire les informations. Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 45 IV. 2.5.1 L'afficheur LCDA- PrésentationLes afficheurs à cristaux liquides, appelés afficheurs LCD (Liquid Crystal Display), sont des modules compacts intelligents et nécessitent peu de composants externes pour un bon fonctionnement. Ils consomment relativement peu (de 1 à 5 mA). Plusieurs afficheurs sont disponibles sur le marché et diffèrent les uns des autres, par leurs dimensions, et aussi par leurs caractéristiques techniques et leur tension de service. Il y a généralement deux types d'afficheurs LCD (Fig. IV.9) [26] : - Les afficheurs LCD alphanumériques qui affichent des caractères ASCII - Les afficheurs LCD graphiques qui permettent d'afficher des images
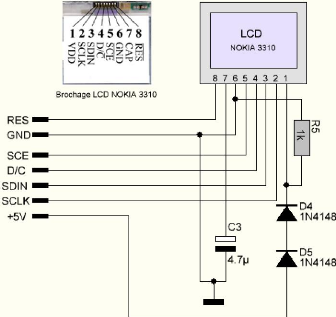
Afficheur LCD 2 X 16 caractères Afficheur LCD graphique Fig. IV.9 : Types d'afficheurs Pour afficher les informations (date, heure, heure de lever et de coucher du soleil, la température, états des capteurs...etc.), nous devons au moins cinq lignes de 16 caractères. Nous vous proposons d'utiliser un LCD de téléphone portable NOKIA 3310 qui les surpasse sur tous les points : - Il est graphique (84x48 pixels) - Il permet d'afficher jusqu'à 6 lignes de 14 caractères (8x5) - On peut créer sa propre police de caractères - Il est facile à piloter (liaison série synchrone à 5 fils) - Son contraste est époustouflant - Il ne consomme que 110ìA sous 3,3V - Il dispose d'une vaste bibliothèque prête sur l'internet, compatible avec MikroC - Des prix vraiment pas chers Chapitre IV Conceptions et réalisation de système B- BrochageDerrière l'écran à cristaux liquides de téléphone portable NOKIA 3310, on trouve une série de 8 broches (Fig. IV.10) qu'ils exercent les rôles suivantes :
Commande de l'éclairage public et mesure de la température à base de PIC18F4550 44 Fig. IV.10 : Brochage et schéma d'interface de LCD Nokia 3310 Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 44 IV. 2.5.2 Le clavier (les boutons poussoirs et les LED)
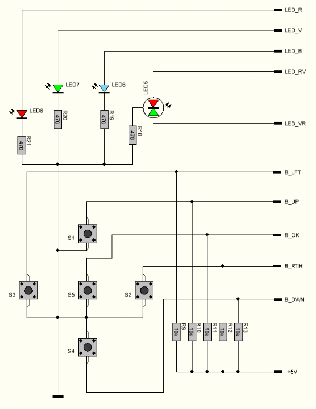
Une diode LED (Light-Emitting Diode) est un composant électronique particulier utilisé comme source de lumière. Pour chacune des LEDs, l'utilisation d'une résistance pour limiter le courant est indispensable. La tension aux bornes d'une LED standard est de l'ordre de 2.5V tandis que le courant peut varier entre 1 mA et 20mA. Dans notre projet nous avons utilisé quatre LEDs, chaque LED présente un mode de fonctionnement avec quatre résistances pour limiter le courant et réduire la tension (Fig. IV.11).
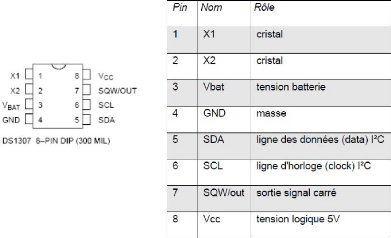
Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 42 Fig. IV.11 : schéma du clavier IV. 2.6 HorlogePour ce système de commande on a besoin de connaître en tout moment la date et l'heure actuelle, afin de déterminer les horaires de coupure de l'éclairage ou ré-exécuter. Ceci est fait par une horloge temps réel. L'horloge temps réel utilisé est le DS1307 de Dallas. IV. 2.6.1 Description du composantC'est un RTC, c'est-à-dire une horloge à temps réel qui va fournir les secondes, minutes et heures, mais aussi les jours, mois et heures grâce à un cristal de quartz. Une pile externe lui permet toujours être fonctionnelle même en cas de coupure de l'alimentation. La figure (IV.13) représente le schéma du module RTC DS1307. Le module DS1307 se contrôle par I2C, il est considéré comme esclave d'adresse 1101000 (0x68 en hexadécimal). Il contient 62 octets de ram, sur c'est 62 octets de ram, 7 contiennent la Chapitre IV Conceptions et réalisation de système date et l'heure (incrémenté automatiquement) que chaque octet représente un registre, plus un octet pour la configuration du DS1307, l'organisation de ces registres dans cet ordre : Tableau. IV.1 : Organisation des registres de RTC [27]
Les 56 octets restant sont utilisés comme mémoire RAM externe, on pourra y stocker des données d'usage (des variables par exemples).Les valeurs (jours, mois, années, ...) sont stocké en BCD (décimal codé binaire). L'avantage d'un tel composant est qu'il ne se décale pas dans le temps. Son système reste parfaitement précis. De plus il tient compte des années bissextiles jusqu'en 2100. IV. 2.6.2 Brochage du DS1307L'horloge temps réel DS1307 est commercialisé dans un boiter de 8 broches classiques, comme illustré dans la figure IV.12
Fig. IV.12 : Brochage du DS1307 [28]
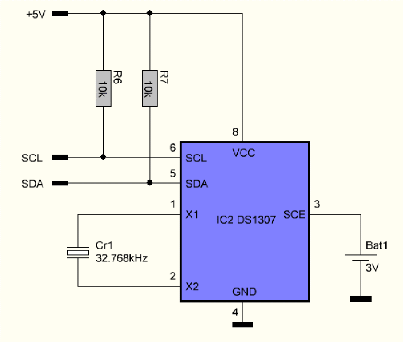
Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 44 IV. 2.6.3 Schéma du module RTC
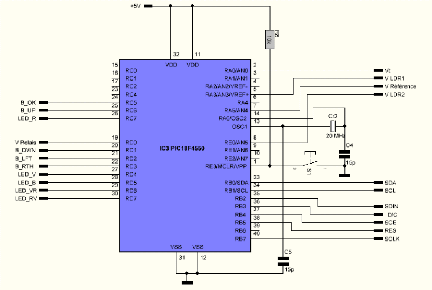
Fig. IV.13 : schéma du module RTC IV. 2.7 Unité de contrôleL'unité de contrôle est basé sur le PIC18F4550 le schéma de cet unité est représenté en figure (fig. IV.14) les ports du PIC serons configurés comme suit : Le port A : le bit RA0 est configuré comme entrée analogique du capture de température, le bit RA5 configuré comme entrée analogique du capture de lumière, le bit RA3 configuré comme entrée de la tension de référence VREF+ du convertisseur analogique/numérique, et les deux bits RA6/OS, RA7/OSC1 comme entrée de l'oscillateur HS 20MHZ. Le port B : est configuré comme sortie, les deux bits (RB0/SDA, RB1/SCL) utilisés pour communiquer avec l'horloge temps réel (DS1307) par bus I2C, et les six bits restant vers l'afficheur LCD. Le port C : nous utilisons trois bits comme suite les bits RC5 et RC6 sont configuré comme entrée numérique dès les boutons poussoir, le bit RC7 est configuré comme sortie vers LED rouge. Chapitre IV Conceptions et réalisation de système Le port D : le bit RD0 est configuré comme sortie vers l'interface commande puissance. Les trois bits (RD1, RD2, RD3) sont configuré comme entrée numérique utilisés pour les boutons poussoir, et les quatre bits restant sont configuré comme sorties vers les LED. Le port E : le bit RE0 est configuré comme entrée analogique de la capture de lumière, le bit RE3 est configuré comme entrée du signal reset du bouton poussoir S1.
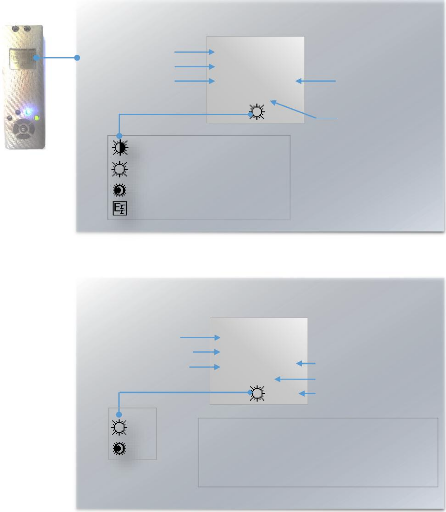
Commande de l'éclairage public et mesure de la température à base de PIC18F4550 44 Fig. IV.14 : schéma de l'unité de contrôle Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 44 IV. 3 Fonctionnement de système
Fig. IV.15 : Conceptions et fonctionnement de système Dans notre système de commande ils existent trois modes de fonctionnement de base. Le mode souhaité est sélectionné par le bouton de commande « Ok », pour chaque mode clignoter une LED (LED rouge pour le premier mode, le vert pour le deuxième mode et le bleu pour le troisième mode), et une LED rouge-vert clignoter en vert si l'appareil fonctionne correctement et en rouge si il y'a un problème dans le capteur de lumière. Le premier mode est basé sur les capteurs de lumière, ces derniers envoient un signal électrique vers le PIC, ce signal est limité entre 0 et Vreff de telle sorte que vreff =1.2V, la Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 44 valeur minimale(0) représente la lumière et la valeur maximal (vreff) représente l'obscurité. La valeur de crépuscule existe entre les deux valeurs précédentes et définie par l'utilisateur. Dans le cas crépuscule de jour le PIC envoie un signal a l'interface de puissance à travers le port D (le bit RD0) , égale a 0 logique pour stopper le flux de courant dans le relais et donc couper l'éclairage, dans le cas de crépuscule de soir il envoie un signal égale a 1 logique pour allumer l'éclairage. Le rôle du second capteur est de vérifier le bon fonctionnement du premier capteur. Le deuxième mode est basé sur le calcul des temps du crépuscule à travers les coordonnées géographiques de l'endroit, et le microcontrôleur à chaque jour calcule les temps du crépuscule (le crépuscule civil). Lorsque l'horloge de l'appareil est égale au temps du crépuscule, le microcontrôleur envoie un signal à l'interface de puissance pour allumer ou éteindre l'éclairage, l'état de l'atmosphère ici ne prend pas en compte parce que dans ce cas les capteurs de lumière sont désactivés. Le troisième mode fonctionne comme le deuxième mode, selon le temps, mais il prend en compte l'état de l'atmosphère, dans ce cas le microcontrôleur calcule deux périodes de temps (la première période du coucher du soleil jusqu'à le temps du crépuscule civil de soir et la deuxième période du crépuscule civil du matin jusqu'à le temps du lever du soleil) et activer les capteurs de lumière dans ces périodes de temps pour confirmer la suffisance de la lumière. Si la lumière n'est pas suffisante pour l'éclairage dans la première période, le microcontrôleur envoie un signal à l'interface de puissance pour allumer l'éclairage, si non (lumière suffisante) le microcontrôleur envoie un signal pour éteindre l'éclairage, après cette période(la période de nuit), le microcontrôleur envoie toujours un signal pour allumer l'éclairage jusqu'à la deuxième période, dans cette période le microcontrôleur vérifie la suffisance de la lumière par les capteurs, si la lumière est suffisante et clair ,il envoie un signal a l'interface de puissance pour couper l'éclairage, si non (n'est pas suffisante) le microcontrôleur envoie un signal pour allumer l'éclairage, après cette période le microcontrôleur envoie un signal pour couper l'éclairage jusqu'à revenir au première période et répétez le même processus. L'horloge de l'appareil est basée sur RTC (horloge temps réel), pour que le microcontrôleur à chaque seconde il donne le temps et la date de RTC et enregistre également toutes les valeurs des informations (longitude, latitude, fuseaux horaires, pourcentage des sensibilités des capteurs de lumières) sur son mémoire interne (EEPROM). Dans notre système le microcontrôleur ne communique pas seulement avec des capteurs optiques, mais aussi avec un capteur de température pour afficher la température en degré sur l'afficheur LCD. Chapitre IV Conceptions et réalisation de système Commande de l'éclairage public et mesure de la température à base de PIC18F4550 45 IV. 4 Consommation d'énergieLe tableau (Tableau. IV.2) présente une comparaison entre les résultats pratiques obtenus à partir de notre système avec les résultats du site web [29] (un site qui se spécialise dans le calcul des heures de lever et de coucher du soleil) concernant les temps du lever et du coucher du soleil et aussi le nombre d'heures de fonctionnement pour deux modes pendant quelques jours et pour l'an 2014 de la ville de Biskra. Tableau. IV.2 : le nombre d'heures de fonctionnement de système
Le tableau (Tableau. IV.3) présente la consommation d'énergie d'un poste de puissance de 2kwh pour deux modes. Tableau. IV.3 : Exemple de consommation d'énergie d'un poste
IV. 5 ConclusionDans ce chapitre, nous avons donné quelques concepts théoriques et nous avons expliqué chaque composant principale du notre montage et par la suite le principe de fonctionnement de notre carte. Commande de l'éclairage public et mesure de la température à base de PIC18F4550 61 Conclusion généraleCONCLUSION GENERALECette étude nous donne un ensemble de solutions possibles pour une commande optimale dans l'éclairage public et pour la réduction du coût de la consommation d'énergie, où nous avons traité trios solutions pour la commande du temps d'allumer ou d'éteindre l'éclairage. Nous avons utilisé la première solution pour résoudre le problème des capteurs optique, souvent sa principale conséquence est la continuité de fonctionnement de l'éclairage dans la matinée, pour éviter ce problème nous avons proposé initialement de poser deux capteurs au lieu d'un seul capteur, alors que le processus ne sera pas exécuté uniquement lorsque les lectures luminescentes dans les deux capteurs sont égaux. Cette solution donne des résultats acceptables en particulier lorsqu'on installe les capteurs éloignés les uns des autres, mais la probabilité de défaillance des deux capteurs reste inévitable. De là, nous devons passer au deuxième solution, qui ne comptera pas sur les capteurs optiques, mais nous basons sur le facteur temps, on calcule le temps du crépuscule civil du matin et du soir pour un lieu particulier, où l'allumage de l'éclairage est commandé uniquement par ce temps, les résultats de ce processus est très précis, mais l'état de l'atmosphère n'est pas prise en compte ,contrairement à la solution précédente, a partir d'ici, nous avons introduit la troisième solution, qui combine entre la première et la deuxième solution où le temps de marche ou d'arrêt de l'éclairage suivie ou précédé par une période de temps limitée, utilisant les capteurs optiques, les résultats de cette dernière sont très exactes et le processus prend en compte l'état de l'atmosphère en deux périodes de temps limitées ,même dans l'existence du défaillance au niveau des capteurs optique, ça n'afflue que dans une période de temps limitée Toutes ces solutions ont été mises en oeuvre au sein d'un système unique et laisser le choix entre ces solutions. Ces solutions restent ouvertes et évolutives par des nouvelles idées, comme l'ajout d'une propriété d'organisation opérationnelle de l'éclairage on basant sur le trafic dès les routes en nuit et ainsi réduire et d'augmenter la quantité de lumière dans ces routes, ou d'ajouter un système d'échange des données à distance entre eux, ou entre les principaux centres de commande. Bibliographie . Commande de l'éclairage public et mesure de la température à base de PIC18F4550 62 Bibliographie
[7]: ( ww1.microchip.com/downloads/en/devicedoc/39632e.pdf): «PIC18F2455/2550/4455/4550 Data Sheet», 16/03/2013
Bibliographie . Commande de l'éclairage public et mesure de la température à base de PIC18F4550 63 [15] : ( www.siea.fr/), "SAISIE DE SCHEMA ISIS 6", p3, 1/04/2013 / 16 :33
[23]: ( williams.best.vwh.net/sunrise_sunset_algorithm.htm), "Sunrise/Sunset Algorithm", 10/01/2013 / 15:21
AnnexeRéalisation pratique Annexe . Commande de l'éclairage public et mesure de la température à base de PIC18F4550 64 1- Caractéristiques du LM7805
? Dimensions physiques
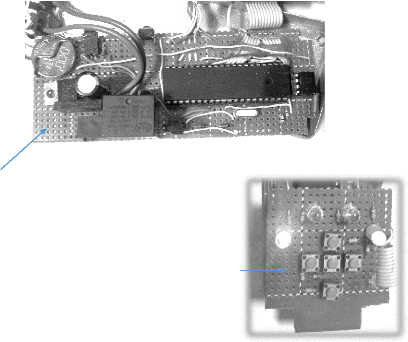
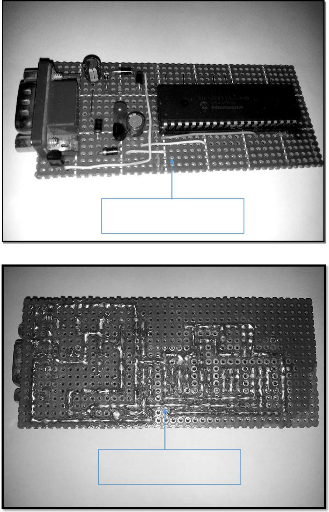
Annexe . La carte de commande sur plaque d'essai perforée. "Côté composant" Le clavier (les boutons poussoirs et les LEDs) sur plaque d'essai perforée. "Côté composant" Commande de l'éclairage public et mesure de la température à base de PIC18F4550 65 2- Carte de commande
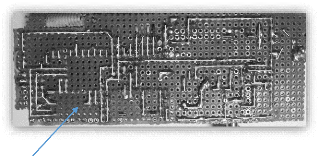
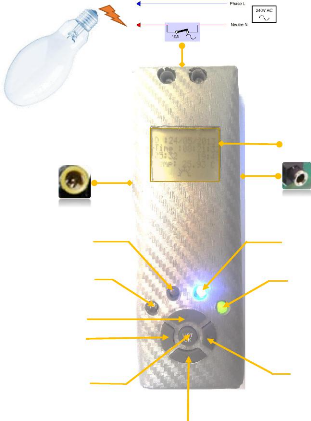
La carte de commande sur plaque d'essai perforée. "Côté cuivre" Annexe . Commande de l'éclairage public et mesure de la température à base de PIC18F4550 66 3- La forme et le design du dispositif final avec la description
Embase alimentation bloc secteur d'un transformateur 240VAC/12VAC ou d'une alimentation continue 12VDC 1A Affichage LCD L'entrée des capteurs optique bouton-haut bouton- gauche bouton- droit bouton- central (Ok) LED vert pour 2eme mode de fonctionnement LED rouge pour 1er mode de fonctionnement LED bleu pour 3eme mode de fonctionnement LED rouge et vert Rouge : Le dispositif ne fonctionne pas correctement, il y a erreur dans le capteur optique Vert : Le dispositif fonctionné correctement bouton-bas - bouton-haut : Utilisé pour changer les valeurs saisies (augmenter). - bouton-bas : Utilisé pour changer les valeurs saisies (diminuer). - bouton-gauche : Utilisé pour naviguer entre les valeurs dans la page des paramètres. - bouton- droit : Utilisé pour naviguer entre les valeurs dans la page des paramètres. - bouton- droit + bouton-gauche : Utilisés sur l'accès à la page des paramètres ou retour à la page d'accueil. - bouton- haut + bouton-bas : Utilisés pour l'accès à la page « À propos de l'appareil ». - bouton- central (Ok) : Utilisé pour choisir le mode de fonctionnement de l'appareil de la page d'accueil ou enregistrer les modifications de la page des paramètres. Annexe .
La page d'accueil Informations La date L'heure Heure de lever du soleil Jour / Le ciel nuageux Jour Nuit Il y a erreur dans le capteur optique D : 24/05/2013 Time : 08 :22 :32 05 :32 19 :40 Heure de coucher du soleil Température en degrés Celsius 10% Jour Nuit Page des paramètres Réglage Jour/mois/année Heures : minutes : seconde Latitude(N : Nord, S : Sud) Remarque : longitude et latitude en degrés décimaux Exemple : longitude de la ville de Biskra est 5°43`59"E (5 degrés, 43 minutes et 59 secondes Est) En degrés décimaux 5 + (43 / 60) + (59 / 3600) = 5.7333 24/05/2013 08 :22 :32 34.85N 005.73E LOCAL +01 Longitude(E : Est, W : Ouest) +/- Fuseau horaire La sensibilité des capteurs optiques Commande de l'éclairage public et mesure de la température à base de PIC18F4550 67 ? Affichage LCD Annexe . 4- Programmateur de PIC
Programmateur de PIC sur plaque d'essai perforée. "Côté cuivre " Programmateur de PIC sur plaque d'essai perforée. "Côté composant"
Annexe . Contact me Please feel free to contact Soufiane if you have any questions, comments, or suggestions. At sofiane ism@yahoo.fr or sofisma@live.fr Or contact me on my Facebook : Sofisma Mix Commande de l'éclairage public et mesure de la température à base de PIC18F4550 69
| 
Changeons ce systeme injuste, Soyez votre propre syndic 
"Il existe une chose plus puissante que toutes les armées du monde, c'est une idée dont l'heure est venue" | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||