UNIVERSITÉ ABDELHAMID IBN
BADIS-MOSTAGANEM
FACULTÉ DES SCIENCES EXACTES ET SCIENCES DE LA
NATURE ET
DE LAVIE
DÉPARTEMENT DE MATHÉMATIQUES

Mémoire de licence
Spécialité Contrôle et Analyse de
Système
Thème
Résolution Numérique Des Equations
Différentielles
Ordinaires Linéaires
Présenté par
BAALI Fakhreddine
RAiIS Omar
Soutenu le 11 /06/2013
Devant le jury
Mr BAHRI Sidi Mohamed Examinateur U. MOSTAGANEM.
Mme BENSIKADDOUR Dj Encadreur U. MOSTAGANEM.
Table des matières
|
1
|
Introduction
Rappels et notations
|
1
2
|
|
1.1
|
Généralités
|
2
|
|
1.2
|
Équations différentielles du premier ordre
|
2
|
|
|
1.2.1 Classification des équations
différentielles du premier ordre
|
2
|
|
|
1.2.2 Les équations différentielles
linéaires du premier ordre
|
3
|
|
1.3
|
Équations différentielles linéaires
d'ordre n
|
6
|
|
|
1.3.1 Cas d'une équation non homogène
|
6
|
|
|
1.3.2 Cas d'une équation homogène
|
7
|
|
1.4
|
Problème avec conditions initiales
|
8
|
|
2
|
La solution numérique des équations
différentielles
|
10
|
|
2.1
|
Méthode d'Euler
|
10
|
|
2.2
|
Méthode Runge-Kutta
|
12
|
|
|
2.2.1 Méthode Runge-Kutta d'ordre 1 (RK1)
|
12
|
|
|
2.2.2 Méthode Runge-Kutta d'ordre 2 (RK2)
|
13
|
|
|
2.2.3 Méthode Runge-Kutta d'ordre 4 (RK4)
|
13
|
|
2.3
|
La convergence des méthodes numériques
|
14
|
|
|
2.3.1 L'erreur locale et l'erreur globale
|
14
|
|
|
2.3.2 Définition de la convergence
|
15
|
TABLE DES MATIÈRES 3
3 Programmation sur Matlab 17
3.1 La méthode d'Euler 17
3.2 La méthode de Runge-Kutta 18
3.3 L'application 19
Conclusion 21
Bibliographie 22
INTRODUCTION
Les équations différentielles constituent l'un
des domaines les plus importants de l'analyse grâce à leurs
nombreuses applications. Elles permettent de modéliser
mathématiquement plusieurs phénomènes physiques et
biologiques et d'étudier des problèmes de population, de
métrologie...
Dans ce mémoire on présente un rapide survol de
quelques méthodes de résolution des équations
différentielles ordinaires linéaires en illustrant quelques
exemples. Il n'est pas toujours possible de résoudre les
équations différentielles et trouver leurs solutions analytiques,
pour tels problèmes on applique des méthodes numériques
pour déterminer des solutions approchées aux équations
différentielles du type problème de Cauchy qui ce formule de la
manière suivante :
~
y'(t) = f(t, y(t)), Vt E
[t0, t0 + T ] (0.0.1)
y(t0) =
y0 où f(t, y(t)) est une fonction de
Rn+4 dans Rn et y0 E
Rn est une condition intiale. La
résolution du problème de cauchy consiste
à trouver une fonction unique y(t) qui soit une solution de
(0.0.1) dérivable sur un intervalle fini [t0, t0 + T]
c R.
On a divisé le mémoire en trois chapitres :
1. Dans le premier on rappelle les définitions, les
différents types et des méthodes de base de résolution
d'équations différentielles ordinaires.
2. Le second chapitre est consacré à la
présentation des méthodes d'approximation pour la
résolution numérique d'équations différentielles
linéaires.
3. Le troisième chapitre consiste à illustrer
ces méthodes par des exemples à l'aide de logiciel de calcul
numérique Matlab.
Chapitre 1
Rappels et notations
1.1 Généralités
Une équation différentielle est une relation
entre la variable x, une fonction inconnue y = y(x)
et ses dérivées y',y'', ..., y(n)
y(n) = f (x, y',
y'', ..., y(fl_1)) : (1.1.1)
L'entier n s'appelle ordre de l'équation
différentielle (1.1.1).
Intégrer l'équation différentielle (1.1.1),
c'est trouver toutes les fonctions y qui vérifie la relation (1.1.1), le
graphe de la fonction y est appelé courbe intégrale de
l'équation différentielle (1.1.1). Intégrer
l'équation (1.1.1) revient à trouver toutes les courbes
intégrales.
1.2 Équations différentielles du premier
ordre
1.2.1 Classification des équations
différentielles du premier ordre
Définition 1.2.1 Une équation
différentielle du premier ordre est de la forme :
y' = f(x,y) (1.2.1)
On distingue trois classes principales d'équations
différentielles du premier ordre :
1. Équations dont on peut séparer les
variables.
2. Équations homogènes (où y' ne
dépend que du rapport y/x).
3. Équations linéaires.
1.2 Équations différentielles du premier
ordre 3
Ces dernières peuvent être à
coéfficients constants ou non, sans second membre (équations
homogènes) ou avec second membre. Ce sont les équations
différentielles les plus utilisées dans toutes les branches de la
physique (mécanique, électricité,...).
1.2.2 Les équations différentielles
linéaires du premier ordre
Définition 1.2.2 Une équation
différentielle linéaire du premier ordre est une équation
de la forme
y' (x) + a(x)y (x) = b(x), (1.2.2)
où a et b sont deux fonctions de la variable
réelle x continues sur le même intervalle I C II1. On
appelle solution de (1.2.2) toute fonction y dérivable sur I qui
vérifie (1.2.2).
Lorsque le second membre b (x) est nul, on dit que
l'équation différentielle (1.2.2) est sans second
membre.
Résolution d'une équation
différentielle linéaires sans second membre
Proposition 1.2.1 Soit a(x) est une fonction
continue sur un intervalle ouvert I de II1; la
solution générale de l'équation différentielle sans
second membre
y' + a(x)y = 0 (1.2.3)
est
y = k exp(--A(x))
où A(x) est une primitive de a(x) et
k est une constante réelle. Preuve Si y
ne s'annule pas sur I on peut séparer les variables
y'
y
= --a(x). (1.2.4)
Z
ln(jyj) =
I
--a(x)dx
En intégrant les deux membres de (1.2.4), on
obtient
1.2 Équations différentielles du premier
ordre 4
|
fOn déduit que si A =
I
|
a(x)dx est une primitive de
a(x) sur I alors
|
ln(jyj) = --A(x) + c, (c
2 II1).
D'où
jyj = e(A(x)+c) =
y =
ece~A(x).
En posant k = #177;ec, la
solution de l'équation différentielle ( 1.2.3) devient
|
y = ke~A(x) =
ke
|
Z~
I
|
a(x)dx
, (k 2 II1). (1.2.5)
|
y =
k(x)e_A(x),
Exemple 1.2.1 Soit l'équation
différentielle du premier ordre sans second membre suivante:
y' + y sinx = 0.
La solution générale de cette équation est
:
y = k ecos x, (k 2
II1).
Résolution d'une équation
différentielle non homogène avec second membre
Théorème 1.2.1 La solution générale de
l'équation avec second membre (1.2.2) est
où A(x) est une primitive de
a(x).
Preuve Pour résoudre l'équation
différentielle (1.2.2) , on procède de la manière suivante
: Etape 1 Résolution de l'équation
homogène (1.2.3) (sans second membre).
Etape 2 On applique la méthode de
variation de la constante
En posant k k(x), la solution (1.2.5) de
l'équation différentielle (1.2.3) devient
1.2 Équations différentielles du premier
ordre 5
k
y = k exp(-- ln(x)) =
x
,
(xE1I8*).
et on a
y' = k'(x)e-A(x) --
A'(x)k(x)e-A(x) =
k'(x)e-A(x) --
a(x)k(x)e-A(x)
En remplaçant y et yi dans
l'equation (1.2.2), on obtient :
k'(x)e-A(x) --
a(x)k(x)e-A(x) + a(x)k(x)e-A(x) =
b(x)
D'où
k'(x)e-A(x) = b(x) =)
k'(x) = b(x)eA(x) (1.2.6)
En intégrant les deux membres de l'équation
(1.2.6), on trouve
Donc la solutions générale de
l'équation (1.2.2) est
|
Zy = e-A(x)
I
|
b(x)eA(x)dx
|
Exemple 1.2.2 On considère l'équation
différentielle suivante
|
1 y' +
x
|
y = 3x, (x E
1[8*) .
(1.2.7)
|
Etape 1 : On commence par la résolution de
l'équation homogène
1
y = 0, (x E
1[8*) .
(1.2.8)
y' +
x
On écrit l'équation
différentielle (1.2.8) sous la forme
dy y
dx
= --. (1.2.9)
x
En intégrant les deux membres de (1.2.9), on
obtient
1.3 Équations différentielles
linéaires d'ordre n 6
Etape 2 : La méthode de variation de la
constante. On pose k - k(x), comme
, (xEIIB*)
k(x)
y(x) = x
est une solution de l'équation
différentielle (1.2.7), alors
|
x k'(x) -
k(x)
+
x2
|
1 k (x) x x
|
= 3x
|
ce qui implique
k'(x) =
3x2.
on intègre cette dernière
équation, on trouve
k(x) = x3 + c, (c E
I[8)
Donc la solution générale de
l'équation (1.2.7) est
x3 + c
y=
, où c est une constante réelle et (x
E II8*) .
x
1.3 Équations différentielles
linéaires d'ordre n
1.3.1 Cas d'une équation non homogène
Une équation différentielle
linéaire d'ordre n, (n E N) à
coéfficients fonctions continues à valeurs réelles est de
la forme suivante
y(n) + an-1
(x)y(n-1) + ... + ai (x)y(i) +
... + a1 (x)y(1) + a0 (x)y =
r (x) (1.3.1)
où y(i), 1 < i
< n sont les dérivées d'ordre i de la
fonction y par rapport à x, et ai , 1 <
i < n sont des fonctions continues à valeurs
réelles.
Une solution de cette équation est une fonction
y (x) , n fois dérivable sur un intervalle ouvert I de
IL
Cependant pour trouver cette solution, on commence
tout d'abord par la résolution de l'équation homogène
associée pour trouver la solution dite homogène ou
complémentaire puis on utilise une méthode analogue à la
méthode de variation de la constante définie
précédement (1.2.1).
1.3 Équations différentielles linéaires
d'ordre n 7
1.3.2 Cas d'une équation homogène
L'équation homogène associée
à l'équation différentielle (1.3.1) est
y(n) +
an-1 (x)
y(n-1) + ... +
ai (x)
y(i) + ... + a1
(x) y(1) +
a0 (x) y = 0
(1.3.2)
Proposition 1.3.1 Toute combinaison linéaire
de fonctions solutions de l'équation différentielle
homogène (1.3.2) est aussi une solution de cette
équation.
Preuve Si les fonctions y1,
y2, ...yn sont toutes solutions de
(1.3.2) linéairement indépendantes, alors
|
8
<>>>>>>>
>>>>>>>:
|
(n)
y1 +
an-1 (x)
y(n-1)
1 + ... + ai
(x) y(i)1 + ...
+ a1 (x) y(1)
1 + a0 (x)
y1 = 0
y2 +
an-1 (x)
y(n-1)
(n) 2 + ... + ai
(x) y(i)2
+ ... + a1 (x)
y(1)
2 + a0 (x)
y2 = 0
:
:
:
yn +
an-1 (x)
y(n-1) (n) n+
... + ai (x)
y(i)n + ... +
a1 (x) y(1)
n + a0 (x)
yn = 0
|
(1.3.3)
|
Xn i=1
(n)
(n-1)
(i)
En multipliant chaque ligne i du système (1.3.3)
par une constante Ci,1 < i < n , on
obtient
i=1 i=1
n
n
!Ciyi +
an-1 (x)
XCiyi! + ... +
ai (x) XCiyi
+
!Ciyi + a0
(x) XCiyi!
= 0
(1)
+ a1
(x)
i=1
n
i=1
|
Donc
|
Xn i=1
|
Ciyi est solution de
(1.3.2).
|
Définition 1.3.1 La solution
générale de l'équation homogène est une combinaison
linéaire des n formes solutions
y1, ... , yn
toutes linéairement indépendantes
yh = c1y1 + ... +
cnyn
Lorsque les fonctions y1,
... , yn sont toutes linéairement
indépendantes, on dit que l'ensemble {y1, ... ,
yn} forme une base de solutions de
l'équation (1.3.2).
1.4 Problème avec conditions initiales
8
Remarque 1.3.1 Si les fonctions ai ;
1 < i < n sont toutes constantes sur 1[8,
l'équation (1.3.1) est dite équation différentielle
d'ordre n à coéfficients constants avec second
membres.
y(n) +
an-1y(n-1) + ::: +
aiy(i) + ::: +
a1y(1) + a0y = r (x)
(1.3.4)
Définition 1.3.2 On définit le
polynôme caractéristique de l'équation (1.3.4) par
P(À) = An +
an-1Àn-1 + ::: + a1io + a0
(1.3.5)
Théorème 1.3.1 ([2]) Lorsque
le polynôme caractéristique p(À) a des
racines A1; :::; Àk d'ordre de multiplicité
respectif r1; :::; rk l'ensemble des solutions de
l'équation différetielle (1.3.2) est le (C-espace vectoriel de
dimension m ayant pour base les fonctions
yj;q (x) =
tqeA3x ; 1 < j < k ; 0
< q < rj - 1.
1.4 Problème avec conditions initiales
En général, les problèmes physiques font
intervenir des conditions initiales sur la fonction y et ses
dérivées y'; y'';
:::; y(n) afin d'obtenir un certain comportement de la solution y de
l'équation différentielle (1.3.1). Dans cette section on
s'intéresse à la résolution des équations
différentielles (homogènes ou non-homogènes) d'ordre n et
de n conditions initiales de type
{
y(n) + an-1
(x) y(n-1) + ::: + ai
(x) y(i) + ::: + a1
(x) y(1) + a0 (x) y = r
(x)
y (0) = k0
y' (0) = k1
.
.
.
y(n-1) = kn-1
(1.4.1)
Théorème 1.4.1 ([2],
[1])"Existence et unicité de la solution" Si les
fonctions an-1; :::; a1; a0 sont toutes
continues sur un intervalle ouvert I C 1[8, alors le problème
(1.4.1) a une solution unique.
1.4 Problème avec conditions initiales
9
Exemple 1.4.1 On résout le
problème:
|
y'' - 4y
8
y(0)
<
: y'(0)
|
=
=
=
|
0
1
2
|
(a)
(b)
(c)
|
(1.4.2)
|
où (a) est une équation
différentielle linéaire d'ordre deux à coefficients
constants sans second membre, (b) et (c) sont deux conditions
initiales.
L'équation caractéristique associée à
(a) est
r2 - 4 = 0 (1.4.3)
elle admet deux racines r1 = 2 et r2 =
-2. L'ensemble des solutions de l'équation (a) est
l'ensemble des fonctions y définies sur par:
y(x) = c1e2x +
c2e_2x, c1, c2 E .
Comme y vérifie les conditions initiales (b) et
(c) , alors :
J
c1 + c2 = 1
c1 - c2 = 1
d'où
J c1 = 1 c2 = 0 :
Donc l'ensemble des solutions du système (1.4.2)
est la fonction y définie sur par y(x) = e2x.
T
h = N
Chapitre 2
La solution numérique des équations
différentielles
L'objet de ce travail se porte sur la rèsolution
numérique des équations différentielles linéaires.
En effet pour résoudre ce problème plusieurs méthodes
numériques sont possibles parmis les quelles on présente la
méthode d'Euler et celle de Runge-Kutta.
2.1 Méthode d'Euler
En mathématiques, la méthode d'Euler, du
mathématicien Leonhard Euler, est une procédure numérique
pour résoudre par approximation des équations
différentielles du premier ordre avec une condition initiale. C'est la
plus ancienne et la plus simple des méthodes de résolution
numérique des équations différentielles.
Définition 2.1.1 La méthode
d'Euler est une méthode numérique élémentaire de
résolution d'équations différentielles du premier ordre
avec condition initiale (problème de Cauchy)
~
y'(x) = f(x, y(x)), Vx E I
(2.1.1)
y(x0) = a où I est un intervalle de de longueur T et
y une fonction réelle définie sur I, a E est
une constante donnée (condition initiale).
On subdivise l'intervalle I en N intervalles
[xn, xn+1], avec n = 0, 1, ..., N - 1 et on
définit le pas h par
2.1 Méthode d'Euler 11
La méthode d'Euler pour la résolution des
problèmes de Cauchy (2.1.1) consiste à calculer les
quantités ym E II1 qui représentent des
approximations de y(xn), définies ci-dessous. La
méthode explicite Pour 0 Ç n
Ç N - 1, on pose
y(xm+1) = y (xn) + hf(xn, y
(xn)). (2.1.2)
La formule (2.1.2) est appelée schéma
d'Euler. Exemple 2.1.1 Soit le
problème de Cauchy
|
~y (x) = -2xy, Vx E I = [0, 0.5] y0 =
1
|
.
|
(2.1.3)
|
La solution analytique du système (2.1.3) est y =
e_x2, x E II1.
On subdivise l'intervalle I en 10 intervalles, donc le pas h
= 0, 05. Comme xn+1 = x + h, alors en appliquant la formule (2.1.2) on
obtient le tableau suivant :
|
x
|
0
|
0.05
|
0.10
|
0.15
|
0.20
|
0.25
|
0.30
|
0.35
|
0.40
|
0.45
|
0.50
|
|
y
|
1.0000
|
1.0000
|
0.9950
|
0.9850
|
0.9703
|
0.9509
|
0.9271
|
0.8993
|
0.8678
|
0.8331
|
0.7956
|
|
y
|
1.0000
|
0.9975
|
0.9900
|
0.9778
|
0.9608
|
0.9394
|
0.9139
|
0.8847
|
0.8521
|
0.8867
|
0.7788
|
avec y est la solution approchée, et y
n est la solution exacte du problème de Cauchy
(2.1.3).
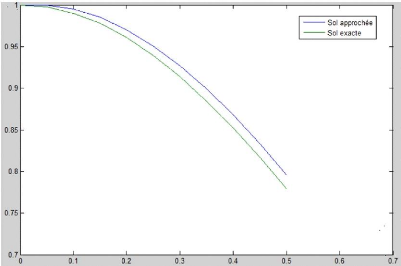
Remarque 2.1.1 On remaque que les
solutions obtenues s'écartent au für et à mesure de la
solution exacte, voir figure 1.
2.2 Méthode Runge-Kutta 12
Cette méthode est équivalente à la
méthode d'Euler, on l'applique généralement pour
résoudre les équations différentielles du
1er ordre.
Figure 1
2.2 Méthode Runge-Kutta
Les méthodes de Runge-Kutta (RK) d'ordre 1,2 ou 4 sont
des méthodes d'approximation de solutions des équations
différentielles, elles ont été nommées en l'hommeur
des mathématiciens Carl Range et Martin Wilhelm Kutta (1901).
C'est méthode reposent sur le principe de
l'intération, c'est à dire qu'une première estimation de
la solution est utilisée pour calculer une seconde estimation, plus
précise, et ainsi de suite, ce sont des méthodes à pas
unique, directement dérivées de la méthode d'Euler.
2.2.1 Méthode Runge-Kutta d'ordre 1 (RK1)
2.2 Méthode Runge-Kutta 13
On considére le problème de Cauchy suivant :
J y/ = f(t; y) (2.2.1)
l y(t0) = y0
La méthode RK1 utilise la formule (2.1.2) pour
résoudre le système (2.2.1).
2.2.2 Méthode Runge-Kutta d'ordre 2 (RK2)
La méthode RK du deuxième ordre produit deux
coéfficients K1; K2 qui permettent d'écrire
h
h:f (xn; yn) l
h:f
(xn + 2;yn + 21
I
+ xl+K2 /
Yn 2
:
2.2.3 Méthode Runge-Kutta d'ordre 4 (RK4)
On applique la méthode de Runge-Kutta d'ordre plus
élevé (RK4) pour obtenir plus de précision ; mais en
doublant le temps de calcul puisqu'on procède de 4 évaluations de
f.
{
|
K1 = h:f (xn; yn)
h K1
K2 = h:f(~
xn+2;yn+ 2
h K2
K3 = h:f(xn+2;yn+ 2
K4 = h:f (xn +
h;yn + K3)
|
:
|
K4
K2
6
3 +
K1 + 6
K3 + 3
yn+1 = yn +
Exemple 2.2.1 On considère
l'exemple (2.1.1) et on applique la méthode de Runge-Kutta d'ordre 2
(RK2).
On a :
h h
yn+1 = yn +
hf(xn + 2;yn +
2f(xn;yn))
Alors, pour n = 0 :
h h
y1 = y0 + hf(x0 + 2 ; y0 + 2 f(x0; y0))
0:05 0:05
= 1 + 0:05f(0 + 2 ; 1 + 2 f(0;1))
= 1 + 0:05f(0:025; 1) = 0:9975
2.3 La convergence des méthodes numériques
14
e, = jy (xn) - ynj
En suivant les mêmes étapes de calcul, on
obtient le tableau suivant :
x,
|
0
|
0:05
|
0:10
|
0:15
|
0:20
|
0:25
|
0:30
|
0:35
|
0:40
|
0:45
|
0:50
|
y,
|
|
1:0000
|
0:9975
|
0:9900
|
0:9777
|
0:9607
|
0:9393
|
0:9138
|
0:8846
|
0:8520
|
0:8165
|
0:7786
|
|
|
y0 ,
|
1:0000
|
0:9975
|
0:9900
|
0:9778
|
0:9608
|
0:9394
|
0:9139
|
0:8847
|
0:8521
|
0:8167
|
0:7788
|
avec y, est la solution approchée, et y0 ,
est la solution exacte du problème de Cauchy (2.1.3).
Remarque 2.2.1 On remaque que les
solutions obtenues sont très proches de la solution exacte, voir figure
2.
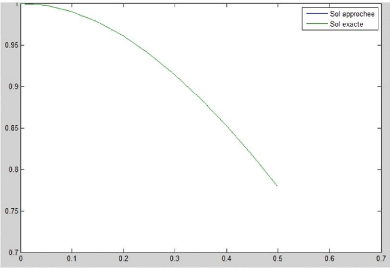
Figure 2
2.3 La convergence des méthodes
numériques
2.3.1 L'erreur locale et l'erreur globale
Définition 2.3.1 "L'erreur locale"
Soit y (xn) la solution exacte de l'équation
différentielle et y, sa solution approchée. On appelle l'erreur
locale d'étape n la quantité
2.3 La convergence des méthodes numériques
15
Erreur globale l'erreur globale est
définit par la formule suivante :
e = max jyn - y (xn)j 0~n~N
2.3.2 Définition de la convergence
La méthode numérique est dite convergente si
|
lim
h--!0
|
e = lim
h--!0
|
max jenj = 0
0<n<N
|
Exemple 2.3.1 Om calcule l'erreur comise
dans le calcul de la solution approchée du problème de Cauchy
(2.1.1)
1. Par la méthode d'Euler
Pour n = 0, on a
e1 = jy(x1) - y1j ~
e(_(0;05)2 - 1
~~~~
=
= j0;9975 - 1j
= 0;0025
pour les autres ordres, on a
n
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
en
|
0
|
0:0025
|
0:0050
|
0:0073
|
0:0095
|
0:0115
|
0:0132
|
0:0146
|
0:0157
|
0:0164
|
0:0168
|
|
2. Par la méthode de Runge-kutta : les erreurs
calculées sont présentées dans le tableau ci-dessous
|
n
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
|
en
|
0
|
0:0000
|
0:0000
|
0:0001
|
0:0001
|
0:0001
|
0:0001
|
0:0001
|
0:0001
|
0:0002
|
0:0002
|
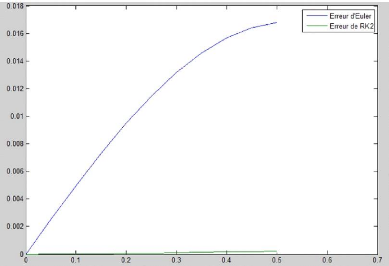
2.3 La convergence des méthodes numériques
16
Figure 3
Remarque 2.3.1 A la lumière de
tout ce qu'on vient d'énumerer dans ce chapitre on peut conclure que la
méthode de Range-Kutta nous permet d'avoir une meilleure approximation
pour la résolution d'une équation différentielle
linéaire ordinaire que la méthode d'Euler.
Chapitre 3
Programmation sur Matlab
Matlab est un langage de programmation adapté aux
divers domaines scientifique, il permet de résoudre différents
problèmes de calcul numérique. On l'utilise dans ce chapitre pour
mettre en oeuvre les méthodes numériques (Euler et Runge-Kutta
d'ordre 2) étudiées dans le chapitre 2.
3.1 La méthode d'Euler
Cette section est consacré à l'écriture
du programme matlab qui nous permet de résoudre le problème de
Cauchy (2.1.1) par la méthode numérique d'Euler.
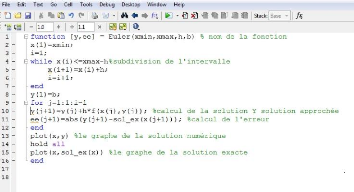
Euler
3.2 La méthode de Runge-Kutta 18
3.2 La méthode de Runge-Kutta
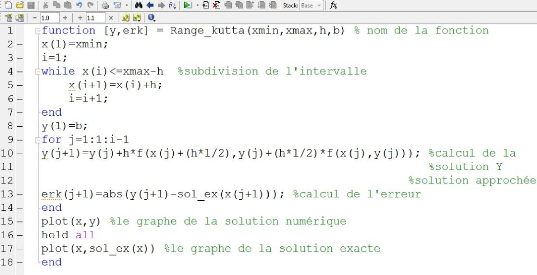
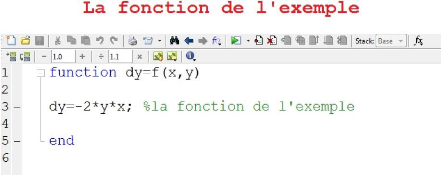
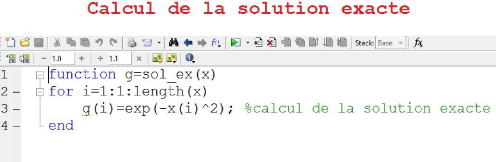
Cette section est consacré à l'écriture du
programme matlab qui nous permet de résoudre le problème de
Cauchy (2.1.1) par la méthode numérique de Runge-Kutta 2.
RK2
3.3 L'application 19
3.3 L'application
Les résultats numériques de la résolution
du problème de Cauchy (2.1.1) par les deux méthodes
numériques (Euler et Runge-Kutta 2) obtenus en utilisant le programme de
Matlab.
3.3 L'application 20
Les résultats numériques de la solution
approchée et les erreurs comises sont comme suit
>> xmin=0
xmin =
0
>> xmax=0.5
xmax =
0.5000
>> h=0.05
h=
0.0500
>> b=1
b=
1
>> [y,ee] = Euler(xmin,xmax,h,b)
y=
1.0000 1.0000 0.9950 0.9850 0.9703 0.9509 0.9271 0.8993 0.8678
0.8331 0.7956 ee =
0 0.0025 0.0050 0.0073 0.0095 0.0115 0.0132 0.0146 0.0157 0.0164
0.0168 >> [y,erk] = Range_kutta(xmin,xmax,h,b)
y=
|
1.0000 0.9975 0.9900
|
0.9777
|
0.9607
|
0.9393
|
0.9138
|
0.8846
|
0.8520
|
0.8165
|
0.7786
|
|
erk =
|
|
|
|
|
|
|
|
|
|
1.0e-03 *
|
|
|
|
|
|
|
|
|
|
0 0.0031 0.0124
|
0.0274
|
0.0474
|
0.0716
|
0.0987
|
0.1275
|
0.1565
|
0.1845
|
0.2100
|
CONCLUSION
Les méthodes numériques de résolution des
équations différentielles sont nombreuses, dans ce mémoire
on a présenté la méthode d'Euler et les méthodes de
Runge-kutta, cettes dernières sont les préférées
mais elles ne sont pas toujours les meilleures, pour chaque problème, on
peut toujours trouver une méthode optimal de résolution.
Bibliographie
[1] S,Benzoni-Gavage,. : Calcul Différentiel et
Équations Différentielles. Dunod, Paris, (2010).
[2] S,Guerre-Delabrière,. M,Postel,. : Méthodes
d'Approximation, Équations Différentielles, Applications Scilab.
Ellipses Edition Marketing S.A, (2004).
[3] J-M, Ledermann,. : Équations Différentielles.
Cours, Paris, (2012).
[4] J,Quinet,. : Cours Élémentaire de
Mathématiques Supèrieures, 4 Équations
Différentielles. BORDAS, Paris, Dunod, (1977).
[5] B,Stout,. : Méthodes Numériques de
Résolution d'Équations Différentielles. Université
de Provence, France, (2007).


