II-4 PRINCIPE DE FONCTIONNEMENT
Lorsque toutes les sécurités ont
été vérifiées par l'automate, les cabines quittent
les stations à une vitesse voisine de 0,5 m/s pendant quelques
mètres pour atteindre progressivement la vitesse nominale de 12,5
m/s.
A l'arrivée, à proximité de la gare, les
cabines ralentissent une première fois, ensuite les cabines ralentissent
de nouveau, puis s'arrêtent aux quais de débarquement respectifs.
Le frein de service est actionné et les portes peuvent s'ouvrir.
Il est impératif d`arrêter les cabines de
manière imminente et à n'importe quelle position, pour des
raisons telles que `vents forts', `incohérence des informations issues
des capteurs de vitesse et de position des cabines'.Aussi, au
redémarrage, la machine motrice devra fournir le couple
nécessaire pour déplacer les cabines. Ce couple peut atteindre
des valeurs importantes, largement supérieures au couple nominal.
II-5 LES MODES D'EXPLOITATION
Afin de répondre en toute sécurité
à toutes les circonstances qui peuvent se présenter en cours
d'exploitation, l'opérateur dispose de quatre modes de marche :
· mode de marche automatique : Tout le cycle de
fonctionnement est pris en charge par les automates.
· mode de marche manuel : Le préposé
assure la totalité des opérations. La vitesse en
différents points du parcours est comparée à celle
définie pour la marche en automatique. S'il y a discordance, le
système est arrêté par action sur le Bpa.
· mode de marche exceptionnel : Ce mode de marche est
utilisé dans le cas de pannes d'automatisme importantes. La plupart des
sécurités sont inhibées. La vitesse est limitée
à 1 m/s.
· mode de marche secouru : L'entraînement est
assuré par un générateur électrique (Groupe
électrogène).
L'automate principal prend en charge :
· La commande des portes.
· L'élaboration des ordres de mouvement.
· L'élaboration des consignes de vitesse pour le
variateur.
· La gestion des défauts de fonctionnement.
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 39
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 40
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
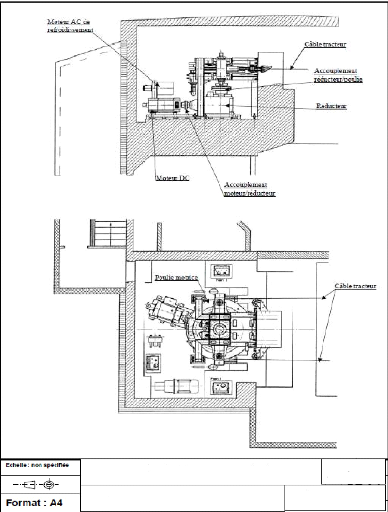
SALLE DES MACHINES
PROJET DE FIN DE CYCLE
MÉMOIRE
ANNÉE 2011
Fig.16 Vue d'une salle des machines
2011
CHAPITRE III :
ÉTUDE PRATIQUE
(Réalisation d'un
micro-téléphérique)
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 41
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann
Page 42
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Le PFE porte sur la conception d'un API adaptable constituant
notre centrale Informatique dont l'élément mère est le
microcontrôleur ATméga 168 D'Atmel qui doit gérer
tout notre système. Pour ce faire nous sommes donc emmené
à construire un environnement dans lequel le microcontrôleur sera
en mesure de recevoir des informations de natures différentes, de les
traiter, et de les restituer aux différents types d'actionneurs.
Le microcontrôleur est un circuit intégré
qui regroupe sur une même puce tous les éléments d'une
structure à base de microprocesseur.
Le microcontrôleur ATméga ou ATtiny font partie
de la grande famille de circuit AVR. Le catalogue d'Atmel ne contient que des
microcontrôleurs à architecture RISC. Il existe en effet toute une
gamme de circuits, compatible des célèbres 8051 d'Intel.
Par contre les circuits RISC d'Atmel sont tous regroupés sous le vocable
de microcontrôleurs AVR, divisés en deux groupes bien distincts au
moins en termes de performances. Celui des microcontrôleurs 8
bits et celui des microcontrôleurs 32 bits. Ils
présentent des représentations physiques diverses. Avec
l'évolution de la technologie visant à l'amélioration des
microcontrôleurs, plusieurs furent replacés par de nouveaux
microcontrôleurs détenant une technologie de pointe (Cas de l'AT90
replac é par ATméga et ATtiny).
C'est donc dans le but d'utiliser le microcontrôleur
performant que nous avions choisis l'ATméga 168 beaucoup
usité de nos jours. Sa représentation physique s'apparente
à celle de l'ATméga 88 et comporte au total 28
broches.
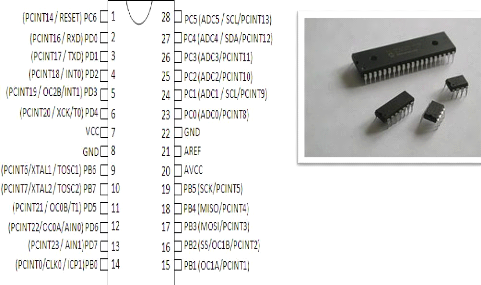
Img. 1 Microcontrôleur ATméga et
ATtiny
Fig.18 Description des différentes
Broches
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann Page 43
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
> Port B (PB7 à PB0) le Port B est un
port d'entrée-sortie à 8 bits bidirectionnel avec des
résistances internes de tirage (choisi pour chaque bit). Il sert aussi
comme oscillateur pour le Timer/Compteur2.
> Port C (PC6 à PC0) le Port C est
un port d'entrée-sortie à 7 bits bidirectionnel avec des
résistances internes de tirage (choisi pour chaque bit). Il sert aussi
de convertisseur analogique numérique.
> RESET(PC6) déclenché par
un front descendant maintenue plus de 50 ns il produira le Reset du
microcontrôleur.
> Port D (PD7à PD0) le Port D est
un port d'entrée-sortie à 8 bites bidirectionnel avec des
résistances internes de tirage (choisi pour chaque bit). Il sert aussi
d'USART et d'entrées pour les interruptions externes.
> XTAL1 Entrée de l'oscillateur
externe ou libre pour l'horloge interne.
> XTAL2 Production de l'amplificateur
d'oscillateur.
> AVCC est une broche de tension
d'alimentation pour le Convertisseur A/D qui doit être connectée
à VCC via un filtre passe-bas pour éviter les parasites.
> AREF est l'entrée de
référence analogue pour le Convertisseur A/D avec une tension
dans la gamme de 2 V à AVCC avec filtre passe-bas.
> GND (22) masse analogique. Si la masse
analogique est séparée de la masse générale,
brancher cette broche sur la masse analogiques, sinon, connecter cette broche
à la masse générale GND.
> VCC broches d'alimentation du
microcontrôleur (+3 à +5V).
> GND masse de l'alimentation.
Il se présente sous la forme d'un circuit
intégré réunissant tous les éléments d'une
structure à base de microprocesseur. Voici généralement ce
que l'on trouve à l'intérieur d'un tel composant :
> Un microprocesseur (C.P.U.) exécutant
séquentiellement les instructions stockées dans la mémoire
programme, il est généralement composé de :
· Un ou plusieurs registres accumulateurs contenant
temporairement les opérandes et les résultats des
opérations.
· Des registres auxiliaires permettant de relayer les
accumulateurs.
· Des registres d'index pour le mode d'adressage
indirect.
· Un compteur programme pointant l'adresse de la prochaine
instruction à exécuter.
· Une ALU permettant d'effectuer des opérations
entre l'accumulateur et l'opérande.
· Un registre code condition indiquant certaines
particularités en ce qui concerne le résultat de la
dernière opération (retenu, zéro, interruption).Toutes
fois il est important de signaler qu'il existe deux catégories de
microprocesseur : les CISC et les RISC.
> De la mémoire de donnée (RAM et EEPROM)
qui permet de mémoriser temporairement les données
générées par le microprocesseur pendant les
différentes phases du traitement numérique (résultats
d'opérations, etc...).
> De la mémoire programme (ROM, OTPROM, UVPROM ou
EEPROM) qui est uniquement accessible en lecture (dite mémoire morte).Sa
programmation nécessite une procédure particulière et un
matériel adéquat.
> Des interfaces parallèles pour la connexion des
entrées / sorties reparties sur plusieurs ports (maximum 8 bits),
permettent de prendre en compte des états logiques appliqués en
entrée ou de
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 44
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
gérer des signaux binaires en sortie. Les broches de
ces ports peuvent donc être configurées en entrée ou en
sortie, avec différentes options (résistances de rappel, sorties
collecteurs ouverts, interruption...). La configuration ainsi que l'état
logique de ces broches est obtenue par des opérations d'écriture
ou de lecture dans différents registres associés à chaque
port. On trouve généralement:
· Un registre de direction pour une configuration en
entrée ou en sortie,
· Un registre de donnée recopiant les états
logiques de chaque broche de port,
· Un registre d'option permettant plusieurs configurations
en entrée ou en sortie.
> Des interfaces séries (synchrone ou asynchrone)
pour le dialogue avec d'autres unités. Les données
envoyées ou reçues se présentes sous la forme d'une
succession temporelle (sur un seul bit) de valeurs binaires images d'un mot.
> Des timers pour générer ou mesurer des signaux
avec une grande précision temporelle.
> Des convertisseurs analogique / numérique pour le
traitement de signaux analogiques.
> Du chien de garde, qui empêche le plantage du
microcontrôleur tout en s'assurant qu'il n'y ait pas d'exécution
prolongé d'une même suite d'instruction.
La majorité des microprocesseurs et
microcontrôleurs utilisent actuellement une architecture interne dite
VON NEUMANN, c'est-à-dire une architecture commune
à celle que l'on rencontre habituellement dans les micro-ordinateurs.
La mémoire, appelée improprement de programme,
contient en fait des instructions et des données placées à
la suite les unes des autres et on ne dispose que d'un bus, appelé bus
de données, pour véhiculer tour à tour les codes des
instructions et les données qui leur sont associées. Si cette
architecture donne toute satisfaction comme nous en avons la preuve
éclatante chaque jour, elle pose quelques problèmes dès
que l'on veut faire fonctionner l'ensemble rapidement. En effet,
l'exécution d'une seule instruction nécessite plusieurs
échanges de données sur le seul et unique bus dévolu
à cet usage puisqu'il faut tout d'abord aller chercher le code de
l'instruction.
Il est alors préférable de faire appel à
une architecture dite HARVARD dans laquelle les instructions et les
données sont clairement différenciées. Ces
dernières sont contenues dans des mémoires différentes et
sont véhiculées sur des bus indépendants.
Bien sûr, vu de l'utilisation, cela ne change rien et
les circuits de ce type s'utilisent exactement comme les autres. Par contre,
les résultats obtenus, en termes de vitesse d'exécution de
programmes peuvent être impressionnants. En effet, l'exécution
d'une instruction ne fait plus appel qu'à un seul cycle machine puisque
l'on peut simultanément, grâce aux deux bus et aux deux
mémoires indépendants, rechercher le code de l'instruction.
Rompant avec une tradition bien établie, les microcontrôleurs AVR
d'Atmel utilisent une architecture HARVARD mais ce n'est pas tout. Ils font
également appel à une architecture de type RISC
qui, comme on le lit un peu trop souvent, ne se résume pas
simplement à disposer d'un jeu d'instructions réduits ; ce qui,
paradoxalement, n'est d'ailleurs pas le cas des circuits AVR.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 45
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable

Unité
Centrale Bus de données
Mémoire de programme contenant instructions et
données
Fig.19 Architecture Von Neumann

Mémoire de
données
Unité
Bus de données Centrale Bus
d'instructions
Mémoire de programme ne contenant que des
instructions
Fig.20 Architecture de Harvard
L'architecture RISC (ce qui veut dire circuit à jeu
d'instructions réduits) présente un avantage considérable
sur les microcontrôleurs. Un vrai circuit de type RISC doit
présenter un certain nombre de particularités propres à
accroître sa vitesse de fonctionnement.
Et tous microcontrôleurs conçus par cette
architecture utilisent des instructions codées sur un seul mot. Cela
présente deux avantages. Le premier est que tous les emplacements de la
mémoire de programme contiennent une instruction, le second est qu'un
seul cycle machine suffit pour lire le code complet d'une instruction,
d'où un gain en vitesse d'exécution. Les circuits RISC utilisent
en suite une structure PIPE LINE qui leur permet
d'exécuter une instruction tout en recherchant la suivante en
mémoire d'où, l'accroissement de la vitesse. Ils exécutent
toutes leurs instructions en un seul cycle machine ce qui est dû en
grande partie au codage de l'instruction sur un seul mot. L'Unité
Arithmétique et Logique, appelé encore « ALU », dispose
en effet en une seule fois de toutes les informations nécessaires
à l'exécution de l'instruction. Les instructions d'un circuit de
type RISC ont une structure aussi Orthogonale que possible,
c'est-à-dire que toutes les instructions peuvent être
exécutées sur tous les registres avec tous les modes d'adressage.
Cela signifie que le travail du programmeur, et donc le nôtre, car il
n'est plus nécessaire de retenir une multitude de cas particuliers
d'instructions qui ne fonctionnent que dans un mode ou dans l'autre.
Nota: Les microcontrôleurs AVR sont
réalisés en technologie CMOS haute vitesse, ce qui leur
confère tout à la fois une faible consommation, une vitesse de
fonctionnement importante et un haut niveau d'intégration. Ils adoptent
tous une véritable architecture RISC de type HARVARD et toutes les
instructions s'exécutent en seul cycle machine. De ce fait leur
puissance exprimée en MIPS (million d'instructions par seconde) est
égale à leur fréquence d'horloge.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann
Page 46
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
I- ÉTUDE LOGICIELLE
Les logiciels mis en oeuvre au pour notre réalisation
sont :
> AVR Studio 4 : la
simulation du programme de notre maquette
> KiCad : pour la saisie du schéma
de montage et le traçage du typon
| 

