|
RÉPUBLIQUE DU BENIN
-~?
MINISTÈRE DE L'ENSEIGNEMENT SUPÉRIEUR ET DE
LA RECHERCHE SCIENTIFIQUE
-~?
UNIVERSITÉ AFRICAINE DE TECHNOLOGIE ET DE
MANAGEMENT
UATM/GASA-FORMATION
MÉMOIRE DE FIN DE FORMATION POUR L'OBTENTION DE
LA
LICENCE
PROFESSIONNELLE
Filière : Génie -
Électrique
Option : Système Industriel
THÈME:
ÉTUDE ET RÉALISATION D'UN MOYEN
DE TRANSPORT PAR CÂBLE
(TÉLÉPHÉRIQUE)
Rédigé par :
Jean Hermann MOELET GOMA
Sous la Direction de :
Ing. Jannot HOUNSOUNOU
Année académique
2010-2011
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann
Page 1
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
RÉPUBLIQUE DU BENIN
-~?
MINISTÈRE DE L'ENSEIGNEMENT SUPÉRIEURE ET
DE LA RECHERCHE SCIENTIFIQUE
-~?
UNIVERSITÉ AFRICAINE DE TECHNOLOGIE ET DE
MANAGEMENT

UATM/GASA-FORMATION
MÉMOIRE DE FIN DE FORMATION POUR L'OBTENTION DE LA
LICENCE PROFESSIONNELLE
Filière : Génie - Électrique
Option : Système Industriel
THÈME:
ÉTUDE ET RÉALISATION D'UN MOYEN
DE TRANSPORT PAR CÂBLE
(TÉLÉPHÉRIQUE)
Rédigé par :
Jean Hermann MOELET GOMA
Sous la Direction de :
Ing. Jannot HOUNSOUNOU
Année académique
2010-2011
|
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
DÉDICACES
Je dédie ce document :
A mon père Jean MOELET, qui n'as
cessé de me bénir, de m'encourager ; trouves ici ma profonde
affection car le visible est en fait une émanation de l'invisible et le
fini est une extension de l'infini.
A ma mère Evelyne TSATSA, dont
l'unique souci est la réussite de ses enfants, et qui c'est
sacrifiée à les aider, à les encourager pour qu'ils
parviennent sur le bon chemin ; trouve ici ma profonde affection.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 2
|
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
REMERCIEMENTS
Au terme de ce mémoire, je voudrais remercier tous ceux
qui ont oeuvrés d'une manière ou d'une autre à
l'élaboration de ce document, et qui ont tout fait pour que mon objectif
soit atteint ; il s'agit :
+ De Mr. Théophane AHYI ; PDG de UATM
/GASA-FORMATION.
+ De Mr. Lafitte NGUEMEGNE: Directeur
Technique, pour le suivi et l'attention manifesté à
notre
égard.
+ De Mr. Marc Aurèle AKPONNA :
Directeur des Etudes et de la Pédagogie pour la
qualité
des enseignants qu'il a mit à notre disposition.
+ De la Direction et de tout le
personnel de l'Université Africaine de Technologie et
de
Management (UATM).
+ De mon Encadreur, l'Ingénieur Jannot
HOUNSOUNOU. Cet homme à qui je dois tout, il
a
été ma lumière et mon guide tout au long de ce
travail.
+ Du personnel de Direction de l'Institut
Universitaire de Technologie (IUT) de Lokossa, qui
a permit utilisation des
ses locaux pour l'élaboration de ce Document.
+ Du Président du jury et les
membres du jury pour avoir accepté de juger ce travail,
car vos
critiques et suggestions serons la bienvenue et nous permettront
d'améliorer ce travail.
+ De mes frères et soeur, cousins et cousines,
nièces et neveux : Cedry, Eric, Emile, Carille
MOELET GOMA,
Fabrice, Eric, Sylvie NYAMBA, Elila PERETZ, Scinthia NYAMBA, Yeshua MOELET
GOMA, Fredman OUALEM, qui me soutiennent moralement.
+ De François DJIMBI et son
épouse, des ami(e)s et connaissances : Armel MOUELLE,
Jonvel
DJIMBI, Anderson MBILA, Ulrich WOOD, Anne BACKOU, Suzel ITOUA, Helga MAMBOUANA,
Messie BOUCKANGOU pour leur soutien de tous genres.
+ Du Rassemblement des Étudiants Congolais au
BENIN (REC.-B) ainsi qu'au Cercle de
Réflexion des
Étudiants Congolais au GHANA(CREC-G) qui sont la source de ma
persévérance, de mon courage et de ma réussite, qui ne
cesse de m'aider, de me prodiguer des précieux conseils et que je
servirai toujours.
+ De tous ceux qui de près ou de loin ont
contribué d'une manière ou d'une autre à
l'élaboration
de ce mémoire, qu'ils trouvent ici l'expression
de ma profonde gratitude.
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann Page 3
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann Page 4
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
SIGLES ET ABRÉVIATIONS
2S : Un câble porteur, un câble
tracteur
3S : Deux câbles porteurs et un câble
tracteur
4S : Deux câbles porteurs et deux câbles
tracteurs
AEF : Afrique équatorial française
AFNOR : Alliance française de normalisation
ALU: Unité Arithmétique Logique
API : Automate programmable industriel
At. : Armoire téléphérique
AVR: Atmel Virtual RISC
Cap: Capteur
CCTG : Cahier des clauses techniques
générales
CEI : Commission électrotechnique
Internationale
CISC: Complex Instruction Set Computer
DMC : Double monocâble
Dt : Départ téléphérique
EEPROM: Electricaly Erasable Programmable ROM
EPROM: Erasable programmable ROM
FMI : Fond monétaire international
IPPTE : Initiative pays pauvres très
endettés
LJ: Diode électroluminescente jaune
LO: Diode électroluminescente orange
LR: Diode électroluminescente rouge
MCC : Machine à courant continue.
NF : Norme française
NITC : Norme internationale des transports en
communs
ns : Nanosecondes
ONATRA : Office nationale de transport
PC: Personal Computer
Pdc : Pouvoir de coupure
PFC : Projet de fin de cycle
PPTÉ : Pays pauvre très
endettés
RAM : Random Access Memory
RDC: République démocratique du Congo
REPROM: Reprogrammable Read Only Memory
RISC: Reduced Instruction Set Computer
ROM: Read Access Memory
SNE : Société nationale
d'électricité
STRMTG : Service technique des remontées
mécanique et de transport guidé
TGBT : Tableau général de basse
tension
UCT : Unité centrale de traitement
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 5
Étude et réalisation d'un moyen de transport
par câble aérien commandé par un API
adaptable
LISTE DES FIGURES ET DES IMAGES
Fig1. Schéma synoptique
Fig2. Plaque signalétique du moteur d'entrainement
principal
Fig3. Chaine schématique simplifiée Fig4a.
Accoupleur moteur-réducteur Fig4b. Accoupleur réducteur-poulie
Fig5a. Poulie motrice
Fig5b. Poulie de renvoie
Fig6. Vue de dessus du système de poulies
Fig7. Coupe du véhicule (cabine)
Fig8. Vue d'une cabine sur câbles
Fig9. Disposition du câble tracteur sur galet de
cavalier
Fig10. Ligne électrique allant du transformateur à
l'armoire électrique
Fig11. Ligne électrique allant du
générateur de secours à l'armoire du
téléphérique
Fig12. Architecture de la partie puissance du variateur
Fig13. Quadrant plan vitesse-couple
Fig14. Schéma de principe de puissance du variateur
Fig15. Structure de l'automate programmable
Fig16. Structure d'un actionneur
Fig17. Vue de la salle des machines
Fig18. Description des différentes broches
Fig19. Architecture de Von Neumann
Fig20. Architecture de Harvard
Img1. Microcontrôleur ATméga et ATtiny
Img2. Menu d'accueil
Img3. Option de configuration
Img4. Compilation
Img5. Simulation
Img6. Menu contrôle
Img7. Fenêtre indiquant la non reconnaissance du
composant
Img8. Fenêtre indiquant la reconnaissance du composant
Img9. Chargement du programme
Img10. Fin du chargement
Img11. Fenêtre principal KiCad
Img12. Fenêtre d'édition de schéma KiCad
Img13. Contrôle des règles électriques
Img14. Génération Net liste
Img15. Appel CvPcb
Img16. Fenêtre CvPcb
Img17. Appel Pcbnew
Img18. Lecture Net liste Img 19. Traçage pistes Img20.
Typon à imprimé
|
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
AVANT PROPOS
L'Université Africaine de Technologie et de Management
à pour vocation de mettre en entreprises du secteur privé ou
public de l'Afrique et du monde en général, des cadres
compétents, dynamiques, rigoureux dans les différents
domaines.
Le mémoire de fin de cycle demandé aux
Étudiants des classes de Licence Professionnelle, est une occasion qui
leur permet d'étudier, concevoir, fabriquer et suivre un PFC. Ce projet,
par la richesse technologique offre aux étudiants l'opportunité
de se familiariser avec les composants des Systèmes Industriels sur
lesquels ils seront appelés à intervenir.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 6
|
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
CAHIER DE CHARGE
L'objectif du PFC vise dans un premier temps à
l'utilisation et la connaissance des microcontrôleurs AVR D'ATMEL, afin
de réduire le coup des réalisations.
Et par ailleurs d'utiliser les microcontrôleurs pour la
conception et la réalisation d'un Automate Programmable Industriel(API)
adaptable pour la commande d'un téléphérique, facilitant
le transport des biens et des personnes dans des zones inaccessibles en un
minimum de temps tout en réduisant l'émission des polluants
(monoxyde carbone, dioxyde de carbone, etc. ...).
RESSOURCES
Le PFC proposé est l'inspiration de l'étudiant
dans le but d'améliorer les conditions de transport entre Brazzaville et
Kinshasa, capitales respectives du CONGO et de la RÉPUBLIQUE
DÉMOCRATIQUE DU CONGO.
Il a été étudié et accepté
par l'Ingénieur en Génie Industriel Jannot HOUNSOUNOU.
Ce travail nécessite un investissement en temps
considérable, et seul l'étudiant poursuivra les objectifs
proposés .Tous les éléments indispensables à la
réalisation de l'API adaptable du système de transport seront
fournis par l'étudiant.
Pour ce faire, ce travail sera réalisé dans le
laboratoire de la reprogrammation des véhicules modernes de l'Institut
Universitaire de technologie de LOKOSSA (UIT).
CONTRAINTES
Les domaines abordés dans ce projet sont surtout
liés à la conception de l'API adaptable, il nous sera donc
indispensable de revoir certains cours, afin de pouvoir le réaliser.
Compte tenu du fait que ce travail se déroule en
Automatisation Industrielle, l'étudiant doit obligatoirement faire un
effort pour la maitrise du principe de fonctionnement du
téléphérique, ainsi que les différents capteurs mis
en oeuvres.
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann Page 7
|
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
INTRODUCTION GÉNÉRALE
L'accroissement exponentiel des performances technologiques
suscite des invocations considérables dans tous les domaines de
traitement de l'information. Compte tenu de l'ampleur du
phénomène de pollution atmosphérique, la gestion
électronique et informatique des remontées mécaniques
s'impose non seulement dans la traversée des zones inaccessibles en un
laps de temps, mais aussi dans la lutte contre l'émission des polluants.
Malheureusement dans les pays Africains en voie de développement
manquent cruellement des techniciens et des ingénieurs qualifiés.
Du fait de leur méconnaissance en systèmes industriels, les
techniciens sont parfois contraints d'évoluer avec l'ancienne
technologie et ce qui fait que la plupart de nos industries ne sont pas
dotées de nouvelles machines. Chez nous étudiants en fin de
premier cycle, nous pensons qu'il est temps de changer les choses car le
plaisir du téléphérique n'est pas seulement celui des
passagers, mais c'est un plaisir partagé avec tous ceux qui nous
entourent.
En effet, depuis la création des premiers moteurs,
d'importantes reformes irriguées par la passion de la recherche des
compétences nouvelles ont prévalue, nous menant ainsi des
éléments discrets vers la technologie intégrée.
Notre ère s'empreinte dés lors de la
miniaturisation et de la simplification des systèmes avec l'utilisation
des microcontrôleurs, des automates qui remplacent valablement les
composants discrets, il est donc temps que l'Afrique soit envahit de
téléphériques afin de neutraliser l'émission des
polluants. C'est en nous inspirons de cette vision des choses que nous avons
choisi L' API ADAPTABLE comme le pilier de notre PFC dont le thème
s'intitule : ÉTUDE ET RÉALISATION D'UN MOYEN DE TRANSPORT
AÉRIENS PAR CÂBLE (Téléphérique)
commandé par un A.P.I. adaptable.
L'Université Africaine de Technologie et de
Management(UATM), préparant ses étudiants à une
intégration progressive dans le monde industriel, nous emmène
à pouvoir exprimer tout haut ce que nous pensons tout bas au terme de la
troisième année selon la filière et l'option choisie.
La découverte de la réalité industrielle,
la compréhension du fonctionnement des différents appareils,
l'envie de vouloir exposer nos connaissances reste l'essentiel de cette
immersion. Pour ce faire, ce présent mémoire est composé
de trois parties dont les plus essentielles sont : l'Étude de
réalisation et l'Étude pratique.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 8
2011
GÉNÉRALITÉS SUR LES MOYENS
DE
TRANSPORTS AÉRIENS PAR CÂBLES ET
SUR
LE TÉLÉPHÉRIQUE
CHAPITRE I :
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 9
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 10
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
I- GÉNÉRALITÉS SUR LES MOYENS DE
TRANSPORTS
AÉRIENS PAR CÂBLES
On appelle transport par câble tout
système de transport guidé dans lequel les
véhicules, notamment les cabines, sièges ou agrès, sont
mus par l'intermédiaire d'un câble. Ce mode de transport se
développe durant la révolution industrielle, dès la
deuxième moitié du XIXe siècle. Il est exploité
comme transport en commun et transport pour compte propre (transport industriel
ou militaire).
On distingue plusieurs typologies de transport par câble
se répartissant en deux grandes catégories, à savoir les
appareils au sol (téléski, funiculaire, ascenseur incliné)
et les appareils téléportés (tyrolienne,
téléphérique, télécabine, funitel et DMC,
télésiège).
Le transport guidé est tout mode de
transport dans lequel les véhicules sont guidés par
l'infrastructure, c'est-à-dire qu'ils n'ont qu'un seul degré de
liberté vue qu'il ne peut avancer et reculer suivant un mouvement de
translation. Les guides sont généralement constitués par
des rails, mais aussi par des ornières, des câbles...Le principale
mode de guidage est le chemin de fer. On peut citer également le
téléphérique, le monorail et l'ascenseur. Les
véhiculés peuvent être autonomes ou bien mus par un
dispositif intégré dans l'infrastructure, tel un système
de traction par câble.
Le transport guidé offre par construction une grande
sécurité en limitant les risques de collision.
Le transport guidé présente peu de souplesse
d'exploitation du fait de l'impossibilité de faire croiser des
véhicules ou d'en faire passer un devant l'autre. Ces manoeuvres
nécessitent des aménagements de l'infrastructure, tels que les
appareils voies et les voies d'évitement dans le mode ferroviaire. Dans
un certain nombre de cas, ils ne permettent qu'une exploitation en navette
entre deux points (cas des téléphériques).
I-1 TYPOLOGIES
I-1-1 Les appareils au sol
Les appareils au sol tractent des véhicules ou des
personnes qui évoluent directement sur une « piste »
tracée au sol ou sur rails.
I -1-1-1 Le téléski
Le téléski, ou remonte-pente, est un appareil
servant à remorquer les skieurs à contrepente sur un terrain
enneigé. Les utilisateurs, debout sur leurs skis, sont tractés
sur une piste par des agrès solidaires d'un câble aérien
à mouvement unidirectionnel continu suspendu à des pylônes.
Les agrès sont équipés en leur base d'une sellette qui
peut être une simple rondelle autorisant la montée par deux. Ils
peuvent être constitués d'une corde solidaire d'un enrouleur ou
d'une perche télescopique.
I-1-1-2 Le funiculaire
Un funiculaire se compose de deux trains circulant en
va-et-vient sur une voie sur rails en pente, reliés par un ou plusieurs
câbles réalisant une demi-boucle en gare terminale. La plupart
des
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 11
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
funiculaires disposent d'une voie unique qui comporte en son
centre une section doublée pour le croisement. On peut trouver
également des funiculaires à voie double sur toute la longueur de
la ligne, ou, plus rarement, des funiculaires à voie tri-rail, avec rail
central mutualisé pour les deux véhicules et séparation au
niveau de l'évitement.
I-1-1-3 L'Ascenseur incliné
L'ascenseur incliné est un appareil de conception
similaire à celle d'un funiculaire, à savoir circulant sur une
voie sur rails en pente, mais avec une cabine unique,
généralement de petite capacité. Le véhicule est mu
par un treuil à enroulement ou, en va-et-vient avec un contrepoids
circulant sous la voie. Il convient de noter que dans plusieurs pays, cet
appareil est considéré comme simple ascenseur.
I-1-2 Les appareils téléportés
Les appareils téléportés utilisent des
câbles qui permettent aux cabines d'être à la fois
tractés et portés au dessus du sol. Mise à part la
tyrolienne, qui de par sa conception rudimentaire n'est pas
répertoriée comme transport guidé, ces appareils sont
administrativement classés comme téléphériques.
Techniquement, la classification téléporté regroupe
plusieurs catégories :
I-1-2-1 La tyrolienne
La tyrolienne est le mode de transport par câble le plus
simple. L'équipement le plus rudimentaire ne nécessite aucun
appareillage autre qu'un câble et une poulie à laquelle on attache
la charge ou la personne à transporter. Il permet le franchissement
d'obstacles dénivelés comme une douve ou autre cuvette naturelle
ou artificielle.
I-1-2-2 Le téléphérique
Au sens technique, un téléphérique se
définit comme un téléporté « bicâble
» : un, ou plusieurs câbles fixes dit « porteurs »
supportent le poids des véhicules par l'intermédiaire d'un
chariot équipé de galets de roulement, tandis qu'un, ou plusieurs
câbles en mouvement dit « tracteurs », sont fixés
à ce chariot et assurent le déplacement des véhicules. Le
téléphérique est généralement à
va-et-vient, à savoir avec deux cabines fonctionnant chacune en
mouvement alterné, mais on trouve également des
téléphériques monovoies, utilisant une seule cabine.
I-1-2-3 La télécabine
La télécabine utilise plusieurs petites cabines
disposées sur un câble unique à la fois porteur et tracteur
(on parle d'installation monocâble, par opposition au système
bicâble d'un téléphérique). Lorsqu'un train de
cabines entre en gare, le câble tracteur est ralenti ou
arrêté pour permettre l'embarquement et le débarquement,
ralentissant ainsi l'ensemble des autres trains de cabines présents sur
la ligne. On trouve également quelques télécabines
à va-et-vient, fonctionnant chacune en mouvement alterné sur un
même câble.
|
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
I-1-2-4 Le funitel et DMC
Les funitels et DMC sont des téléportés
où les cabines sont disposées sur deux câbles à la
fois porteurs tracteurs. Ces appareils, fonctionnent généralement
selon un principe analogue à la télécabine, mais la
présence de deux câbles autorise des cabines de plus grande
capacité. Le funitel est l'évolution du DMC. Il se distingue de
ce dernier par un espacement nettement plus conséquent de ces
câbles offrant une excellente tenue au vent.
I-1-2-5 Le télésiège
Le télésiège utilise plusieurs
sièges disposés sur un câble unique à la fois
porteur et tracteur, circulant suivant un mouvement unidirectionnel. Ils
existent des télésièges fixes restent solidaires du
câble, y compris des télésièges débrayables
qui peuvent être désaccouplés du câble en gare pour
l'embarquement ou le débarquement. Cette dernière typologie
permet des vitesses exploitations supérieures.
I-2 INTÉRÊTS DES MOYENS DE TRANSPORT PAR
CÂBLE
Les moyens de transport par câble présentent
plusieurs intérêts parmi lesquelles : les intérêts
d'ordres techniques, économiques et écologiques,
énergétique.
Le transport par câble permet la liaison la plus
directe, face à une pente. Le transport par câble se soustrait des
contraintes topographiques du terrain : il permet la liaison la plus directe,
face à une pente et sans détour. De plus, c'est un transport en
commun en site propre ; son fonctionnement n'est donc pas perturbé par
la rencontre avec d'autres modes de transport. Cela en fait donc un mode de
déplacement performant sur des trajets de quelques centaines de
mètres à quelques kilomètres.
Hors appareils au sol, le coût d'investissement d'un
appareil de transport par câble se limite généralement
à l'installation des stations et à la mise en place des machines.
Le câble possède un impact faible sur le terrain puisqu'il le
survole, et le coût reste indépendant de la topographie (par
exemple, le franchissement d'un cours d'eau, d'une dépression longue et
étroite ou d'une voirie ne nécessite aucune construction
particulière). Cela permet de réduire le coût et la
durée de construction, simplifie les formalités administratives,
et limite les intérêts d'emprunt.
Les appareils qui disposent d'une voie de roulement
spécifique (piste, rail, ou câble porteur) sont encore plus
économes en énergie, car la motorisation n'a pas à
supporter le poids des cabines.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 12
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann Page 13
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
II- GÉNÉRALITÉS SUR LES
TÉLÉPHÉRIQUES
Dans le langage commun, le
téléphérique (ou
téléférique) représente une
remontée mécanique équipée de cabine de grande
capacité desservant un sommet généralement difficile
d'accès. Il est un moyen de transport par câble aérien,
techniquement il désigne une catégorie de transport par
câble à structure bicâble. Les fonctions « porter«
et «tracter« emploient des câbles différents.
Le téléphérique est classé parmi
les installations ferroviaires, suite à son infrastructure fixe sur
laquelle circulent des cabines. Ici, le câble porteur n'est rien d'autre
qu'un rail, cela à été conclu par rapport à la
disposition actuelle des câbles des téléphériques
modernes. Ils sont utilisés dans des régions ou d'autres moyens
de transports seraient difficiles à construire. Le trajet est souvent en
forte pente ou par le survol des dépressions géographiques.
Les téléphériques sont des moyens de
transports impressionnant car leur vitesse est variable et peut atteindre
12,5m/s. Ils sont souvent appelés téléphérique
2S ,3S ou 4S, suite au nombre de câblés
utilisés.
II-1 HISTORIQUE DU
TÉLÉPHÉRIQUE
Le téléphérique est un moyen de transport
aérien par câbles. C'est aussi un transport guidé .Il
représente une remontée mécanique équipée
d'une cabine. Les premières traces de transport par câble
remontent au Moyen âge, des gravures Japonaises attestent de l'existence
des téléphériques pour passagers vers 1200.
En 1405, ces engins construits de façons artisanales
furent utilisés pour transporter des Hommes, des armes, des chevaux
par-dessus des cours d'eau .Ils étaient supportés par des
câbles en fibres naturels, ce qui limitait la charge de transport ou la
pente. On l'utilisait aussi à des faims industrielles ou militaires.
Suite à l'invention du câble métallique par l'allemand
ALBERT WILHELM en 1834 ainsi que la maîtrise du tréfilage, ce
principe fut adopté dans l'exploitation minière. En se basant sur
le même principe le Groupe ADOLPH BLEICHERT & CO construit en 1872
son premier téléphérique pour le transport des
matériaux. C'est suite à l'emploi des techniques novatrices et
d'une certaine standardisation par le groupe que le
téléphérique entra dans l'ère de modernité.
Dans la même perspective, des milliers d'installations de ce type furent
construites en l'espace d'une cinquantaine d'années.
Afin de fiabiliser le câble et par la suite permettre au
téléphérique de franchir des reliefs démonstratifs,
plusieurs techniciens mirent la main à la patte pour l'obtention des
câbles plus résistant pouvant supporter des cabines plus lourdes
que les précédentes. Ce n'est qu'après une concurrence
acharnée que le téléphérique vu le jour et il se
développa dans la foulée avec l'évolution industrielle. Ce
n'est qu'à partir des années 1920 qu'il servit à des fins
touristiques .Il servit aussi favorablement dans le ravitaillement des troupes
militaires pendant les années 1931-1945.A une certaine époque,
son entretien ne fut pas facile ce qui entraina la disparition de nombreux
constructeurs suite l'abaissement des demandes. Pour palier à cette
contrainte, les constructeurs firent conduit à se regrouper.
De là, il fut le moyen le plus favorable dans des
régions ou d'autres moyens de transports serait difficiles à
construire. Et suite à cela, il devenu un moyen de transport fiable et
fit son entrée dans
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 14
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
l'ordre des moyens de transports en communs en site propre. De
nos jours, le téléphérique est d'une grande renommé
de par le monde.
II-2 DISPOSITIONS GÉNÉRALES
La conception et la réalisation d'un
téléphérique se résume en un certain nombre de
tâches :
· Concevoir une installation dans les conditions
spécifiées par le maitre d'ouvrage, dans le respect des
réglementations tout en tenant compte des risques identifiés,
liés au système et à son environnement.
· Déterminer par une analyse de
sécurité les constituants de sécurité.
· Élaborer le cahier des charges nécessaire
à la définition des constituants de sécurité et du
sous-système déterminés par l'analyse de
sécurité ainsi que des autres composants
nécessaire entrant dans sa réalisation.
· Sélectionner les constitutions de
sécurité, les sous-systèmes, les autres composants
nécessaires à la réalisation du
téléphérique en cohérence avec le cahier des
charges.
· Concevoir le génie civil en métal et
béton pour répondre aux risques liés à
l'environnement et favoriser la compatibilité avec les sous
systèmes en respectant les préconisations des fabricants et la
réglementation.
· Réaliser et concevoir le génie- civil.
· Assembler les constituants de sécurités au
sein des sous systèmes dans le respect strict du domaine d'utilisation
définit par le fabriquant.
· Assembler les sous systèmes entre eux et avec les
autres constituants de génie civil.
· S'assurer du bon fonctionnement en sécurité
du système, afin d'être convaincu que le
téléphérique est conforme à la
réglementation technique et de sécurité.
II-3 AVANTAGES ET INCONVÉNIENTS
II-3-1 Avantages
Le téléphérique est le moyen de transport
le plus usité dans les zones ou d'autres moyens de transports seraient
difficile à construire. Il permet de gravir un relief pentu ou une
dépression géographique (vallée, cours d'eau), et cela en
un temps minimal.
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann Page 15
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Il offre par construction une plus grande
sécurité en limitant les possibilités de collisions, de
faire croiser des cabines et permet qu'une exploitation en navette entre deux
points. Il est moins polluant et ne contribue pas assez à
l'émission des effets de serres.
Moins bruyant, il ne consomme pas en carburant et le
coût de sa maintenance n'est pas assez élevé. Il soustrait
les contraintes topographiques du terrain, contribue à la protection des
sols, des eaux, des paysages. Sa construction est très rapide et dure au
plus un an, et il impose un respect d'horaire.
II-3-2 Inconvénients
Le téléphérique ne présente pas
assez d'inconvénients, mais comme aucune oeuvre humaine n'est parfaite,
certaines défaillances ont été
énumérées. Il demande généralement un
investissement important, et n'emploi pas assez d'opérateurs. Sa
confection n'est favorable qu'en absence des intempéries, le
téléphérique est amenés à affréter
parfois peu remplis.
II-4 IMPLANTATION DU PROJET
II-4-1 Introduction
Le Congo, ou Congo-Brazzaville, officiellement
République du Congo, est un pays d'Afrique centrale, situé de
part et d'autre de l'équateur qui passe précisément par la
ville de Makoua, dans la région de la Cuvette. Avec pour capitale
Brazzaville, il est limité par le Gabon (Ouest), le Cameroun
(Nord-Ouest), l'Angola et l'enclave du Cabinda (Sud), la République
centrafricaine (Nord) et la République démocratique du Congo
(Est).
Il est séparé, en partie, par le fleuve Congo
puis l'Oubangui et le Cabinda(Angola). Le pays s'étend sur 1300
km du nord au sud, de l'océan Atlantique à la
frontière centrafricaine. Le pays possède une façade
maritime sur l'Atlantique Sud, sur une longueur de 169 km. La
République du Congo est fréquemment appelée
Congo-Brazzaville pour la distinguer de l'autre Congo, officiellement
appelée République démocratique du Congo, ou
Congo-Kinshasa. Elle a également porté le nom de
République populaire du Congo. En 1885, le Congo fut l'un des
quatre États de l'AEF, et Brazzaville sa capitale. Il est
constitué d'une végétation dense dont la forêt
s'étend sur près de deux-tiers du territoire de la
République du Congo, ce qui en fait le quinzième pays au monde
par la proportion de couvert forestier. Le Congo est un pays en
développement, qui fut autrefois inclus dans IPPTE. Le
Point d'achèvement de l'initiative PPTE a été atteint en
janvier 2010, avec l'approbation de la Banque mondiale et du FMI.
L'économie congolaise repose principalement sur l'exploitation des
hydrocarbures. Le bois représente une part importante des exportations
du Congo, dont la surface est couverte de forêts à près de
60%, pour un total de vingt-et-un millions d'hectares. Dans le nord et
le sud, il ya de grandes zones d'exploitation forestière. La plus grande
partie de la production agricole (manioc, fruits et légumes) est
consommée localement ; néanmoins. Brazzaville fait face à
Kinshasa la capitale de la RDC, avec qui ils entretiennent des échanges
d'ordre commerciaux. Quatre fois plus grand que la France, quatre-vingts fois
la Belgique, 33 fois plus grand que le Benelux (Belgique, Pays-Bas et
Luxembourg), la RDC est une catastrophe naturelle, mais souffre d'un manque de
voies de communication fiables. Traversée par l'équateur, elle
comprend trois climats : le climat équatorial, le climat tropical et le
climat de montagne.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 16
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Suite à leur rapprochement, Kinshasa et Brazzaville
sont les deux capitales les plus rapprochées au monde, et sont
séparées par le «Majestueux fleuve Congo».
II-4-2 Intérêts économiques du
fleuve Congo
La capitale du Congo est
séparée de la RDC par le fleuve Congo, deuxième fleuve au
monde par son débit moyen après l'Amazone et le deuxième
d'Afrique par sa longueur après le Nil. Il sert de frontière
naturelle entre les deux pays, et fait une distance d'environ 7000 m
entre les deux rives. Le fleuve est également une source potentielle
d'énergie hydroélectrique à certaines zones, et les
barrages d'Inga au bas de Pool Malabo sont les premiers à exploiter ce
potentiel. Il est entrecoupé par des rapides en amont et en aval,
voilà pourquoi son cours est navigable par section.
Brazzaville étant éloigné de
l'océan atlantique est plus rapidement ravitaillé de la RDC par
Kinshasa sa capitale, les mouvements des personnes et des biens comme les
échanges commerciaux, sont très intenses et fructueux. Les ports
appelés respectivement Beach de Brazzaville et Beach Ngobila, font
l'objet d'un afflux de passagers. Environ 2500 et 3000
personnes traversent chaque jour le fleuve dans les deux sens pour exercer
leurs activités commerciales de part et d'autre du fleuve Congo
(D'après le rapport l'ONATRA en 2010). Cela
est possible grâce au fleuve qui leur permet de naviguer par pirogues par
navettes ou par ferrys. Mais, il faut plusieurs minutes voir une heure pour
relier les deux bouts. Brazzaville vit largement de cette main-d'oeuvre, ainsi
que de l'importation d'articles de première nécessité
venant de la RDC.
Ainsi, à partir de Kinshasa, les commerçants
exportent régulièrement à Brazzaville des articles d'ordre
vestimentaires, cosmétiques, etc..., ainsi qu'une gamme variée de
produits agricoles. De Brazzaville, les commerçants déversent eux
aussi sur Kinshasa des articles du même ordre que sur l'autre rive du
fleuve Congo.
En période de crue, le niveau d'eau très
élevé facilite la navigation et c'est en cette période que
les chiffres d'affaires des commerçants sont en hausse et que le trafic
est accéléré, ce qui leur donne un gout à la vie.
C'est aussi à cette période que de nombreux accidents sont
enregistrés. Cela est dû soit au fait que les NITC ne sont pas du
tout respectés (poids, le nombre de personnes à bord etc...),
soit à la défectuosité des moyens de transports.
En période d'étiage, la navigation
s'avère très difficile suite à la diminution d'eau, ce qui
rend quasi impossible le trafic. L'utilisation des pirogues sont courantes
à ce moment. Les risques de chavirement ne sont pas exclus. Il existe
aussi des échanges inter professionnels entre les deux capitales. Il
n'est pas facile à ces personnes physiques de quitter de chez eux tous
les matins pour aller travailler sur l'autre rive, et de rentrer tous les
soirs. La durée de la traversée étant assez importante,
elles sont obligées à prendre en location une pièce ou
encore une chambre d'hôtel, où elles demeureront les jours
ouvrables. Seul le week-end leur permettra de rentrer, et après le cycle
reprendra son cours. Cela augmente les charges budgétaires et ne permet
pas à certains de couvrir ou joindre les deux bouts.
|
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
II-4-3 Approche de solution
L'envie de réaliser ce PFC nous est venue du fait de
vouloir améliorer les conditions de ce trafic si bénéfique
pour les riverains. Aussi pour que les traversées se fassent en moins de
temps et cela sans interruption saisonnière. En les offrants plus de
sécurité, les usagers pourront effectuer le plus de navettes
possibles en moins de temps et cela à leur guise.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 17
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
2011
ÉTUDE DE RÉALISATION
CHAPITRE II :
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 18
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 19
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
I- PRÉLIMINAIRES ET GÉNIE CIVIL
Les travaux de construction d'un
téléphérique sont généralement assez long et
demandent plusieurs mois. Plus les travaux démarrent tôt
c'est-à-dire en absence des contraintes atmosphériques (pluies,
vent...), mieux c'est. On ne sera pas alors surpris par la dégradation
du temps en début de la saison des pluies ou de l'hiver.
En premier lieu, un terrassement du terrain est très
important pour dégager l'espace favorable à l'implantation des
édifices (zone de circulation, salle des machines, etc...).Les
matériaux utilisés dans les éléments constitutifs
doivent être choisis en fonction des conditions de mise en oeuvre et
d'utilisation ; leurs caractéristiques et propriétés sont
garanties compte tenue des clauses des normes et des prescriptions
particulières.
Pour ce faire, nous sommes emmenés à creuser
des fouilles profondes pour y couler des massifs de béton permettant de
fixer les potences de nos installations. Ces massifs seront ensuite
coulés dans les coffrages, dans lesquels seront placés des fers
à béton. Les massifs en béton seront coulés
à l'aide des bétonnières et ensuite séchés
pendant quelques semaines. Une fois les massifs en béton
réalisés, nous procédons alors au montage des potences et
des poutres principales pour former l'ossature de notre local ainsi que celles
qui permettront de soutenir les câbles porteurs. Les contours seront
recouverts de briques ou alors de poteaux métalliques qui serviront de
garde- fou.
Lors de cette construction l'usage du bois n'est pas admise
car elle peut s'avérer dangeureuse.C'est pour cette raison que la
construction métallique est exigée. Mais le choix de l'acier pour
concevoir le métal est très cruciale et est défini par le
document AFNOR NF A36.010 intitulé :
choix de qualités d'aciers pour construction
métallique.
Les éléments assurant le maintien des
câbles de l'installation motrice et des poulies de renvoi ou de traction
etc...., sont généralement conduits en observant les
règles de conceptions de la norme NF EN 13107 relative aux
ouvrages de Génie-civil.L'ouvrage ainsi que ses différents
composants sont conçus et mis en oeuvre selon le C.C.T.G
appliquées aux marchés des travaux publics métalliques,
dans le respect des règles de l'art.
Une fois l'ossature et les locaux montés, la phase
technique peut alors débuter son cours. L'installation mécanique
est primordiale car le téléphérique doit son bon
fonctionnement au respect des instructions du STRMTG.
II- ÉTUDE DU MATÉRIELS
I-1 DESCRIPTION TECHNIQUE
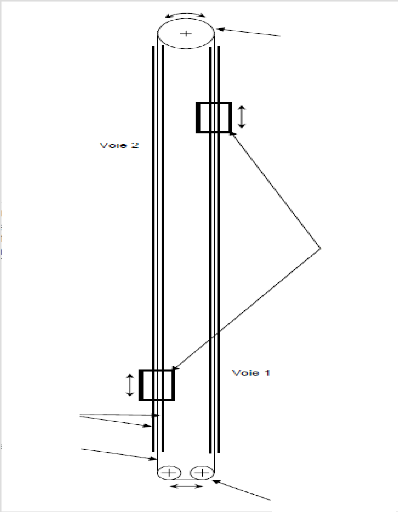
I-1-1 SCHÉMA SYNOPTIQUE
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 20
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Cabine
Voie 2
Câble porteur
Voie 1
Zone de circulation
Partie
opérative
Partie
commande
Câble tracteur
Zone de circulation
Partie
opérative
BLOC B
BLOC A
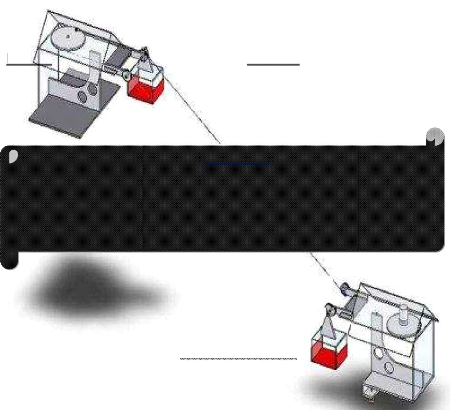
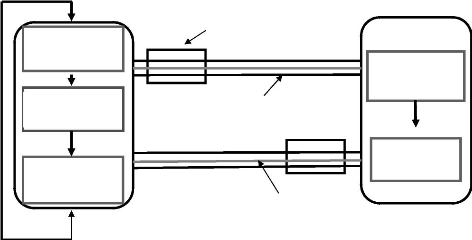
Fig.1 Schéma synoptique
Le Bloc A représente la station motrice de notre
téléphérique, et renferme :
· tous les dispositifs d'entraînement et de
freinage du câble tracteur : moteur principal, réducteur,
accouplement, poulie motrice, freins, moteur de secours.
· un pupitre qui regroupe les commandes de marche, les
signalisations, les sécurités, les appareils indicateurs
permettant de contrôler à tout moment la vitesse et la position
des cabines par rapport aux stations.
· une armoire électrique qui intègre les
dispositifs de protection ainsi que les automates de contrôle et de
commande.
Il est composé de trois parties dont deux sont
essentielles sur lesquelles se repose notre étude. Ces deux parties
travaillent de façon que la première coordonne toutes les
instructions effectuées par la seconde. Ainsi la seconde partie jouit
d'une dépendance fonctionnelle totale de la première. Elles
effectuent des actions cohérentes et synchronisées. La
première partie dite partie commande représente le cerveau
même de notre système, du fait que la seconde se contente
d'accomplir toutes les informations générées par la
précédente elle est alors nommée partie opérative.
Quant à la troisième, elle n'abrite que le terminal (embarquement
et débarquement des passagers) ainsi que la cabine, cette partie
à donc été appelée zone de circulation.
La station de renvoi qui est le Bloc B comporte :
· Un système de renvoi du câble tracteur
composé de poulies.
· des interrupteurs de position extrême qui
commandent l'interruption du fonctionnement automatique.
Il se compose de deux parties qui sont la partie
opérative et la zone de circulation qui doit son inaptitude suite
à la mise hors service de la station motrice.
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
I-1-2 ÉTUDE DE CHAQUE PARTIE DE BLOCS
I-1-2-1 Partie commande Bloc A Elle est
composée de :
· L'armoire électrique
· De l'automate
· De deux voyants cycles
· Des boutons poussoirs manuels : départ et
arrêt cycle, arrêt d'urgence, marche secours
I-1-2-2 Partie opérative Bloc A
Celle-ci se compose de :
· D'un moteur d'entrainement
· De deux dynamos tachymétriques
· De deux freins
· De deux générateurs d'impulsions
optiques
· D'une alimentation de secours.
· D'une poulie motrice
· D'un variateur de vitesse
I-1-2-3 Patrie opérative Bloc B
Elle e se compose essentiellement de :
· Du système de renvoi (poulies de renvoies)
I-1-2-4 Zone de circulation Bloc A et B
En ce qui concerne leur constitution, elle n'est pas si
différente l'une de l'autre. Seule la disposition opposée des
cabines ainsi que le chemin d'accès aux cabines les rendent
différent. Elles comprennent :
· un capteur de présence cabine
· un capteur de poids
· Des vérins électriques
I-1-2-5 Tableaux éléments avec leur
fonction
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 21
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 22
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
BLOC A
|
Éléments
|
Fonctions
|
Automate
|
Il coordonne, commande et règlemente le cycle ce notre
système
|
armoire électrique
|
Il contient les différents éléments
électriques de notre installation
|
Bouton poussoir
marche/arrêt cycle
|
Il permet à l'operateur de pouvoir mettre en service
ou hors service le cycle. De l'interrompre et le relancer en
cas de défaillance du système
|
bouton poussoir d'arrêt d'urgence
|
Il permet à l'opérateur de mettre hors service
tout le système en cas de perturbations (météorologiques,
défauts de fonctionnement, incendie, etc....)
Il sert de relève au réseau électrique,
empêche l'arrêt momentané du
|
bouton poussoir Marche secours
|
système en cas de coupure du secteur
|
moteur d'entrainement
|
Il sert à entrainer les câbles tracteurs afin
que les cabines puissent effectuer le déplacement en va-et-vient
|
détecteur de survitesse
|
Il a pour rôle de détecter les vitesses
étrangères a la plage de vitesse requise lorsque le
téléphérique est en mouvement aussi d'adapter la vitesse
des cabines en fonction de leur position sur le trajet
|
dynamos tachymétriques
|
Ils permettent de mesurer la vitesse le long du trajet
|
Freins
|
Ils ont pour rôle de ralentir en agissant sur la poulie
motrice de façon progressive jusqu' à l'arrêt ou de
réduire la vitesse en cas de survitesse
|
alimentation de secours
|
Elle permet de remettre automatiquement en service le cycle
en cas de coupure électrique du réseau
|
capteur de présence capteur de poids
|
Il détecte la présence de la cabine dans le
terminal Il détecte le poids requis à la cabine avant le
départ
|
Voyants cycles
|
Ils indiquent à l'opérateur la mobilité et
le stationnement des cabines.
|
Poulie motrice
|
Elle est entrainée par le moteur d'entrainement et met
en mouvement le câble tracteur
|
|
BLOC B
|
Éléments
|
Fonctions
|
Poulies de
renvoies
|
Elles accompagnent dans son mouvement le câble tracteur
entrainé par la
partie motrice
|
capteur de
présence
|
Il détecte la présence de la cabine dans le
terminal
|
|
Pour réaliser ce téléphérique, il
est très important d'étudier de façon technique notre
système ;. C'est pour ce faire que nous sommes contraints de faire des
études d'ordres mécanique, électrique,
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
électronique et informatique. Étant
donné que ces études se valent, il nous ait donc indispensable de
pouvoir évoluer sans avoir fait au préalable ces
études.
II-1 ÉTUDE DE LA PARTIE MÉCANIQUE
La partie mécanique comporte plusieurs
éléments déclarés indispensables pour la mise en
service de notre moyen de transport. Elle regroupe en son sein l'entrainement
principal, le réducteur. avec le concours des deux freins, des deux
dynamos tachymétriques, des cabines et des différents
câbles participent à la sécurité du
téléphérique.
II-1-1 MOTORISATION PRINCIPALE
Il est constitué d'une machine à courant
continu à excitation indépendante de 400 kW. Le
système est entraîné, depuis la station motrice par
celle-ci dont les caractéristiques nominales figurent sur la plaque
signalétique ci-dessous. Cette machine à courant continu est
alimentée à l'aide d'un variateur de vitesse tout thyristors, et
est refroidie par un ventilateur à entraînement
séparé .Elle entraine l'arbre de la poulie motrice sur lequel est
monté l'un des deux dynamos à travers un réducteur de
rapport 15,4. Le frein de service agit généralement sur
le volant d'inertie situé sur l'arbre rapide en sortie de moteur, et
Compte tenu des cycles de fonctionnement, la machine associée au
variateur possède une capacité de surcharge de 1,6 fois son
courant nominal.
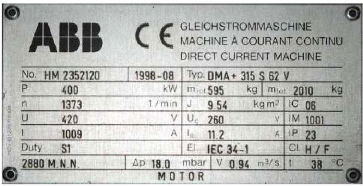
Fig.2 Plaque signalétique du moteur à
courant continu
La machine à courant continu choisie est donnée
pour sa puissance, cette puissance ne correspond pas à la puissance
"catalogue" du constructeur. La machine a en effet été
déclassée à cause de l'altitude. D'où le
coefficient de correction ou de déclassement s'écrit

Kd = P1/P2
(Kd est donné en %)
P1 : puissance corrigée
P2 : puissance catalogue
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 23
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
Le facteur de correction de la puissance de la
machine à courant continu est fonction de l'altitude et de la
température ambiante ; le réducteur à pour rapport
l'expression ci après :
r =
?er
?sr (Avec r 1) (1)
(2)
La conservation de puissance se déduit sous la
formule :

Psr = Per.
Tired
Psr = Csr. ?sr (3) et Per= Cer. ?er (4) en
remplaçant (3) et (4) dans la formule (2) on obtient :
Csr. ?sr = Cer. ?er. fired
|
|
|
Csr= (Cer.
?er. Tired) /?sr
|
|
|
|
|
|
|
|
Et en faisons agir (1) tout en tirant ?sr on aboutit au
résultat suivant : Csr = Cer. F. Ti
red
L'expression du couple en entrée du
réducteur est définit par la formule suivante :
csr
Cer -- F 11 red
|
avec Csr =
|
|
T pc
F.Rp
Ti pc : Rendement de la poulie / câble
F : Force exercée par le câble
tracteur Csr : Couple à la sortie du
réducteur
Per : puissance d'entrée
?er : vitesse d'entrée
Psr : puissance de sortie
?sr : vitesse de sortie
Cer : Couple à l'entrée du
réducteur
Rp : Rayon de la poulie
Poulie motrice
Machine à courant continu

Réducteur de rapport r=15,4
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 24
Fig. 3 Chaîne cinématique
simplifiée
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
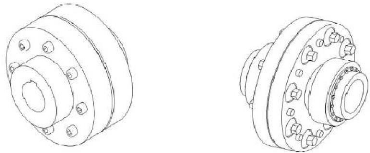
Les machines sont raccordées les une des autres par
des accoupleurs .La MCC est accouplé par un accoupleur moteur
réducteur et le réducteur à la poulie motrice par un
accoupleur réducteur poulie. Il est évident que les deux
accoupleurs ne soient pas de identique.
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 25
Fig.4a Accoupleur moteur -réducteur Fig.4b
Accoupleur réducteur - poulie
Les entrainements doivent être équipés de
deux freins indépendants l'un de l'autre. Dans le cas où
l'installation fonctionne avec l'entraînement de secours, un seul frein
agissant sur la poulie motrice est suffisant. Les freins agissent par
frottement. Ils peuvent être communs à plusieurs
entraînements. Chacun des deux freins assurent l'arrêt et
l'immobilisation de l'installation dans le cas de charge le plus
défavorable prévu.
Chacun des freins est dimensionné de sorte que la
décélération moyenne calculée sur l'entière
distance d'arrêt à vitesse nominale maximale puisse être au
moins égale à : 0,5 m/s2. Afin
d'éviter des freinages pouvant constituer un danger pour les passagers
ou provoquer des dommages matériels, le système de freinage
permet d'adapter la force de freinage à la charge de l'installation.
II-1-1-1 Système d'isolement thermique des
moteurs
Les moteurs DMA+ sont conformes aux normes d'isolement de la
classe H. Les bobinages d'induit et les enroulements du stator sont
isolés au vernis polyamide. L'isolement des fils de cuivre, de la fibre
Nomex et du vernis d'imprégnation, ont des indices de température
de classe H.Les moteurs n'étant utilisés qu'en classe F, il en
résulte une capacité de surcharge élevée et une
large marge de sécurité.
II-1-1-2 Calcul de l'échauffement
Selon les normes CEI 60034-1 et 60034-2, le
calcul est réalisé suivant la méthode de la variation de
résistance des enroulements, par la formule :
2011
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
R1 : résistance de l'enroulement à la
température T1 (froid)

T2-T1 =
~~~~~
Ri (235+T1)
R2 : résistance de l'enroulement à
la fin de l'essai
T1 : température (°C) de l'enroulement au
moment de la mesure de la résistance initiale.
T2 : température (°C) de
l'enroulement à la fin de l'essai.
Nota : Cette formule correspond à un enroulement
du moteur ABB (cas des enroulements en cuivre).
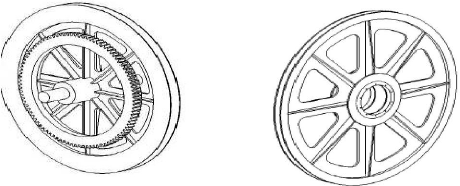
II-1-2 POULIES (MOTRICE ET RENVOIE)
Notre téléphérique dispose de deux gares
terminales équipées de poulies qui font effectuer au câble
tracteur une demi-boucle pour le renvoyer en ligne sur l'autre voie et
où sont tendus les câbles
porteurs. Une des gares est la station motrice ; une poulie
dite motrice y entraîne le câble par le biais du moteur à
courant continu solidaire au réducteur. La cinématique est
complétée par de frein
d'urgence généralement situés en
périphérique de la poulie motrice. On trouve également une
marche de secours, généralement assurée par un moteur de
secours permettant le rapatriement des cabines à faible vitesse. La
seconde gare abrite le système de renvoi du câble tracteur. Ce
système est assuré par deux poulies de même diamètre
mais différente de la motrice. Ces poulies ont respectivement un poids
de 5000 et 887 kg.
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 26
Fig.5a Poulie motrice Fig.5b Poulie de
renvoie
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann Page 27
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Poulie motrice
Cabines
Câbles porteurs Câble tracteur
Doubles poulies de renvoies
Fig6. Vue schématique du système
poulies
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
II-1-3 CÂBLES ET CABINES
La ligne d'un téléphérique est
constituée de :
· Un, ou plusieurs câbles dit porteurs supportant
le poids d'une cabine par l'intermédiaire d'un chariot
équipé de galets.
· Un, ou plusieurs câbles dit tracteurs, fixes
à ce chariot, qui sont mus par le moteur à courant continu
situé dans la gare motrice et permettant le déplacement des
cabines .La cabine, suspendu au chariot, est généralement une
cabine fermée (transport de voyageurs) mais peut également
être une simple benne ouverte (transport de matériaux). Les
câbles d'un téléphérique sont tendus entre les deux
gares, il arrive également que la portée soit
réalisée sans appuis intermédiaires, les seuls points
d'appuis sont les deux extrémités du câble.
Il existe plusieurs dispositions de câbles. La plus
courante est désormais celle qui emploie deux câbles porteurs en
parallèle et un câble tracteur central (cas de notre
téléphérique) ; les câbles porteurs peuvent ainsi
assurer une charge plus importante. Le cavalier est muni d'un galet supportant
le câble tracteur. Ces types de téléphériques sont
résistant et assez stables au vent. Étant donné que nos
câbles sont fortement tendus entre deux appuis horizontaux, le calcul
d'effort de tension est déduit par la relation suivante (calcul
simplifié) :

H =
8. f
w. L2
H : effort de tension f : est la flèche
L : la portée w : Le poids linéique
Les cabines sont supportées par les deux câbles
porteurs de 80mm de diamètre chacun et tractée par un câble
de 52 mm. Les câbles et les cabines sont faits de métal ;
le véhicule est constitué de deux rangées places assisses
soit 8 sièges de deux places par rangée. Elle a une longueur de
1230 cm et une largeur de 340 cm avec 250 cm de
hauteur. De deux portières de 100 X 180 cm et cinq
fenêtres De 110 X 80 cm.
1230 cm
120 cm
1OO cm
120 cm
100 cm 80 cm 50 cm 100 cm
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 28
Fig.7 Coupe du véhicule
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
L'ensemble du véhicule, chariot, galet,
cavalier, suspente constitue la cabine et tout cet ensemble à un poids
de 2480 Kg à vide. Elle a une contenance de 2240 Kg pour 32 passagers ce
qui fait en moyenne un poids de 70 kg /pers. Il est prévu un poids de
320 Kg sur les porte-bagages soit 10kg/pers. Ce qui fait 2560Kg transportable
par notre téléphérique, d'où le poids de la cabine
à charge est de 5040 Kg. Et ne favorisera pas une surcharge car la
capacité en passager et celle de la cabine à vide reste tractable
par la motorisation principale. De cette façon notre système ne
subira pas un éventuel encombrement de charge.

Câbles porteurs (2 par voie)
Galet de chariot (x16)
Articulation
Suspente
Chariot
Cavalier
Fig.8 Vue d'une cabine sur câbles
Agence des transports en commun Brazzaville -
Kinshasa (ATC /BK)
2,50 m
Véhicule
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 29
Le cavalier est fixé solidement à la
suspente et sont indissociables. Il comprend le chariot, les galets de chariot,
l'articulation et le galet du cavalier sur lequel passe le câble
tracteur. Le câble fait un enroulement d'un tour sur le galet de
cavalier, ce qui empêche la possibilité d'un déraillement
du câble, et maintient l'écart entre les câbles
porteurs.
Galet de cavalier
Câble tracteur
Fig.9 Disposition du câble tracteur sur le galet de
cavalier
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
II-2 ÉTUDE DE LA PARTIE ÉLECTRIQUE
Pour alimenté notre
téléphérique, nous avions équipé notre
système d'un transformateur HT/BT, 20 kV / 400 V - 1250 KVA, pour
alimenter la station en énergie électrique .Du transformateur
à l'armoire du téléphérique nous aurions : un
disjoncteur D1 NS2000N, un interrupteur sectionneur D3 IN 2000, un disjoncteur
départ Téléphérique D10 NS 1600N et d'un
disjoncteur Armoire Téléphérique Q1 afin de
protéger nos appareils contre tous risques électriques. Le choix
des disjoncteurs D1 et D10 étant conforme, leur Pdc ne peut être
identique et est calculable à partir de :
U20 : Tension Icc : courant de court-circuit

Icc~
U2o
v3x.I R2+ X2
R : Résistivité X : Réactance du
câble

Réseau en amont
|
Transfor mateur 1250 KVA
|
Câble de liaison TGBT
|
Disjoncteur D1 NS2000N réglage Ir=1800A Isd=9000A
Tr=0,5s
|
Interrupteur
sectionneur
D3 IN 2000
|
Disjoncteur dt D10 NS1600N réglage Ir à 0,6 Isd
à 10 Tr=0,5s
|
Câble liaison
|
Disjoncteur at Q1
|
|
Fig.10 Ligne électrique allant du
Transformateur
à l'armoire du
téléphérique
Nota : Icc permet de déterminer le Pdc des
disjoncteurs
De la ligne électrique au
générateur de secours allant à l'armoire électrique
du
téléphérique, les faibles
courants de court-circuit générés par les
générateurs de secours rendent difficile la protection des
circuits. Le choix du disjoncteur placé en aval du
générateur dépend du courant de court-circuit
délivré par le générateur ainsi que de
l'impédance interne de l'alternateur.

/n
Icc=
.12
x l33
Icc : Courant de court circuit de l'alternateur In :
courant nominal de l'alternateur
X'd : réactance transitoire exprimée en
%.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 30
Le générateur de secours triphasé
de caractéristique 800 kVa /400 V/ X'd = 16 sera connecter à
Disjoncteur D2 NS1250N, un interrupteur Sectionneur D4 IN 2000, un Disjoncteur
départ Téléphérique D10 NS 1600N et cela part un
câble de liaison en cuivre de 3 x 1 x 185 mm2.
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|

Groupe Électrogène
triphasé
P = 800 kVa U = 400 V X'd = 16 %
|
Câble de liaison Cuivre,
3x1x185 mm2
|
Disjoncteur D2 NS1250N réglage
Ir 0,9
Isd à 5
Tr à 0,5s
|
Câble de liaison Cuivre,
3 x 1x185 mm2
|
Interrupteur Sectionneur D4
IN 2000
|
Disjoncteur départ Téléphérique
D10
NS 1600N réglage
Ir à 960 A Isd à 9600 Tr à 0,5s
|
|
Fig.11 Ligne électrique allant du
générateur de secours à l'armoire du
téléphérique
Ir : déclanchement thermique Isd :
déclenchement magnétique
Le calcul du courant nominal est effectué par la
formule suivante :
P : Puissance
U : Tension
In : courant nominale

In=
v3xU
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 31
II-S ÉTUDE DE LA PARTIE ÉLECTRONIQUE
II-S-1 Le variateur de vitesse
Le variateur de vitesse associé à la
machine à courant continu d'entraînement est de la gamme DCS de
ABB. Il est alimenté à partir du réseau triphasé
SNE 3x400V - 50 Hz. La partie puissance du variateur est composée de 2
ponts de Graëtz à thyristors (pont 1 et pont 2), montés en
tête-bêche aux bornes de l'induit de la machine à courant
continu. Par inversion du courant et/ou de la tension, la machine à
courant continu peut fonctionner dans les 4 quadrants du plan
vitesse-couple.
Ceci autorise, en particulier, des freinages
contrôlés et une inversion rapide du sens de rotation. On
supposera que la séquence de commande du variateur utilisé est
à logique d'inversion : un seul des 2 ponts est commandé à
la fois en fonction du signe du courant.
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
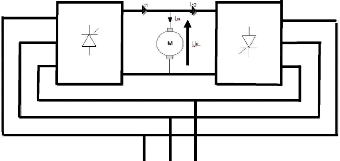
L1 L2 L3
Fig.12 Architecture de la partie puissance du
variateur
Vitesse

Fig.13 quadrants plan vitesse couple
Pour un sens de rotation du moteur 2 quadrants (I et
II) .Par symétrie, dans l'autre sens on parcourt également 2
quadrants (III et IV).
Et la structure des deux ponts est donnée par le
schéma suivant
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 32
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
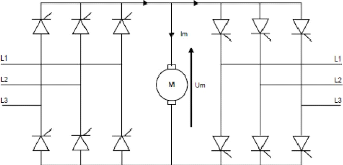
Fig14. Schéma de principe de puissance du
variateur
La tension délivrée en sortie par chacun
des ponts est réglée à l'aide des angles de retard
à
l'amorçage des thyristors. La tension moyenne en
sortie du variateur se calcul par :

Umoy~
3v 2
7
U CoS.ø
U : tension efficace
P: angle de retard d'amorçage
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 33
II-S-2 AUTOMATE PROGRAMMABLE
II-S-2-1 Présentation
L'automate programmable industriel est un dispositif
électronique programmable (car étant à microprocesseur) de
traitement de l'information, destiné à la commande des machines
et des installations.
Ils présentent l'avantage d'être
beaucoup plus robustes que les microcontrôleurs. Ils résistent
mieux aux parasites extérieurs et permettent une programmation en
langage évolué accessible à un personnel non
informaticien. Les entrées-sorties présentent une forte
immunité aux bruits et de plus, les interfaces d'entrées-sorties
sont intégrées dans l'automate. L'automate programmable
présente également des avantages spécifiques qui
sont:
· Moins de câblage: les connexions se
réduisent au raccordement des capteurs aux entrées (acquisition
de données), et des pré-actionneurs aux sorties. L'accès
aux différents organes de l'automatisme lors des modifications et des
réglages se trouve ainsi facilité;
· Plus de confort : le programme qui se
substitue au câblage est un ensemble de graphiques que l'on peut saisir,
modifier et archiver facilement grâce au terminal de programmation et de
réglage;
· Plus d'informations: l'automate programmable
offre des fonctions d'automatisme spécifiques intégrées en
son sein pour les automatismes complexes;
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 34
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
· La maintenance et la mise au point d'un automatisme sont
facilitées par la visualisation permanente de l'état des
entrées-sorties par l'intermédiaire des voyants lumineux; Par
ailleurs, il est capable de travailler en ambiance industrielle
sévère: Industriels.
· Humidité: 90%;
· Température d'utilisation: 60°C,
90°C avec adjonction de circuit de réfrigération;
· Poussière et eau : protection IP65;
· Insensible aux chocs et aux vibrations;
· Autre point important, l'API à une immunité
importante aux parasites qui sont fréquents; Enfin, prenant le pas sur
les systèmes à logique câblée, il permet la
réduction de l'encombrement des circuits de commande, traite plus
rapidement les informations et supprime le câblage interne.
II-3-2-2 Structure
Cette structure est représentée sur la figure
suivante
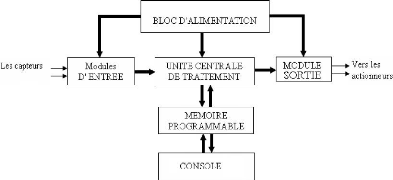
Fig15. Structure de l'automate
programmable
Un automate programmable se compose en général:
+ D'une unité centrale de traitement (UCT);
+ D'une zone ou espace mémoire;
+ Des modules ou cartes d'entrée et de sortie;
+ Des modules de fonctions spécifiques
A cet ensemble, nous pouvons ajouter l'outil de programmation
qui peut être une console de
programmation ou un PC (personal computer) et le logiciel de
programmation.
II-3-2-2-1 Unité Centrale de Traitement
+ L'U.C.T est le cerveau de l'automate. Module à
microprocesseur, elle est composée de
l'unité arithmétique et logique, d'un
séquenceur associé à une pour les applications
complexes;
+ D'un bloc d'alimentation;
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann Page 35
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
+ Des bus internes et externes;
horloge, de registres divers. Ainsi, elle pilote l'automate en
assurant successivement :
- La lecture des informations d'entrée;
- L'exécution des instructions du programme mis en
mémoire;
- La commande des sorties;
II-S-2-2-2 Espace mémoire
Le programme de gestion de l'automatisme est stocké
dans un espace mémoire. Ce programme peut être restitué
à l'unité centrale en vue du traitement.
Les mémoires des A.P.I sont de deux types:
· Mémoires vives à accès
aléatoire (lecture-écriture) ou RAM dont le contenu peut
être facilement et rapidement lu et modifié, mais disparaît
en cas de coupure de l'alimentation non secouru.
· Mémoires mortes (à lecture seule) dont
le contenu est toujours disponible et utilisé comme mémoires
programmes:
· ROM dont l'écriture est effectuée de
manière définitive par le constructeur et utilisée pour
mémoriser les fonctions de base, les microprogrammes;
· REPROM dont le contenu peut être effacé
soit par exposition de la mémoire à un rayonnement ultra-violet
(EPROM) soit électriquement (EEPROM). Il peut alors être
reprogrammé par l'utilisateur;
II-S-2-2-S Modules ou cartes
d'entrées-sorties
Ils servent d'interface entre U.C.T et la
périphérie industrielle. Les modules d'entrée autorisent
l'acquisition des données provenant des capteurs. Ces données
sont filtrées et mises en forme pour éliminer les parasites.
Les modules de sortie quant à eux transmettent les
résultats du traitement aux pré-actionneurs.
Par ailleurs, suivant la nature du signal transmis, les
modules d'entrées-sorties peuvent être classés en deux
catégories:
· Les modules d'entrées-sorties "tout ou rien" (TOR)
servant d'interface, Pour les signaux logiques d'état binaire "1" ou
"0";
· Les modules d'entrées-sorties analogiques qui
permettent de traiter les grandeurs à variation progressive et continue
telles que la température, la pression, la vitesse, l'intensité
du courant électrique etc....;
II-S-2-2-4 Modules de fonctions spécifiques
Pour des applications complexes certains modules
spécifiques peuvent être associés aux API. Nous pouvons
citer :
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 36
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Les coprocesseurs qui sont des cartes au format PC à
intégrer dans un PC fonctionnant sous Windows 95 ou Windows NT afin
d'optimiser les performances dans les applications nécessitant, par
exemple un niveau élevé de fonction de dialogue, de conduite ou
de supervision.
Les cartes périphériques intelligentes de
communication (Fipway, Fipio Agent, Uni-Telway, Modbus/Jbus, Modbus plus,
Modem) offrant en outre une structure logicielle multitâche : tâche
maître rapide, traitement sur événements.
Des modules de sécurité permettant d'assurer un
relayage intermédiaire fiable en éliminant les risques d'un
défaut du circuit de commande (entrées), d'un défaut de
l'interface de puissance et même d'un défaut de composants
internes au module.
Des modules de régulation de procédés,
des modules de comptage et d'acquisition, des modules de commande de mouvement
(pour servomoteurs, pour moteurs pas à pas).
II-S-2-2-5 Bloc
d'alimentation
Le bloc d'alimentation permet de fournir à chacun des
constituants de l'API (U.C.T, les modules d'entrées-sorties ou autres
modules associés) la tension d'alimentation convenable pour leur
fonctionnement. Chaque module d'alimentation possède un emplacement
réservé et une pile fournissant l'alimentation à la
mémoire RAM interne des processeurs afin d'assurer la sauvegarde des
données lorsque l'automate est hors tension.
II-S-2-2-6 Bus internes et
externes
Les bus internes assurent la liaison et le transfert
d'information entre les différentes unités de l'automate. Ils
sont multiples et permettent les communications simples (bus de liaisons
séries) et complexes (bus Fipway, bus Fipio, bus Uni-Telway, bus
Modbus/Jbus).
Les bus externes, quant à eux, permettent le transfert
d'informations entre l ' A.P.I et sa périphérie (processus
commandé poste de commande).
II-S-2-2-7 Fonctionnement d'un automate
programmable
Les échanges entre l'unité centrale et les
modules d'entrées-sorties sont effectués de manière
cyclique. Un cycle de fonctionnement de l'automate ou scrutation comprend trois
phases successives:
Phase 1 : mise
à jour dans la mémoire des données de l'état des
entrées.
Les modules d'entrée de l'automate transforment les
signaux électriques des capteurs et des boutons poussoirs en signaux
compréhensibles par l'automate. Les états logiques correspondants
à ces signaux sont ensuite transférés dans la
mémoire des données.
Phase 2 : Exécution
du programme.
L'unité de traitement de l'automate exécute les
instructions de la mémoire programme (mémoire contenant le
programme) en fonction des informations de la mémoire des données
et met à jour les informations de sorties dans la mémoire des
données.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 37
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Phase 3 : Mise à jour des
sorties.
Les résultats du traitement préalablement mis
en mémoire des données sont validés et
transférés dans les modules de sorties pour être convertis
en signaux électriques qui sont transmis aux pré-actionneurs et
aux organes de dialogue (voyants, sonnerie...).
II-4-3 LES CAPTEURS
II-4-3-1 Généralités sur les
capteurs en automatisme
Un capteur est un organe de saisie d'information qui
prélève une grandeur physique à mesurer ou à
contrôler et la transforme en un signal (électrique, hydraulique
ou pneumatique). L'utilisation de plus en plus fréquente de
calculateurs, d'automates programmables, de microcontrôleurs ou de
microprocesseurs a permis un accroissement des applications des capteurs qui
sont devenus en quelque sorte les sens de l'automatisme sans lesquels aucun
mouvement cohérent n'est possible. Lorsque le capteur
délivre un signal électrique
correspondant au franchissement
d'un seuil qui peut être une position, un niveau, etc. on parle en effet
de détecteur.
II-4-3-2 Les détecteurs de position
Le franchissement de la position de butée lors du
déplacement de l'élément à positionner est
décelé par un capteur de position encore appelé
détecteur de position. C'est un appareil qui comporte un
élément sensible de détection et qui délivre par
l'intermédiaire d'un organe de commutation, un signal binaire. On
distingue deux catégories de détecteurs de position : les
détecteurs dynamiques et les détecteurs statiques.
II-4-3-3 Caractéristiques principales des
capteurs
Les capteurs utilisés en automatisme présentent
différentes caractéristiques qui permettent de prévoir
leur fonctionnement et aident dans leur choix. On définit donc les
caractéristiques mécaniques et électriques.
En ce qui concerne les caractéristiques
mécaniques, on définit la Course d'Approche (CA) qui est celle
avant l'apparition de l'information; la Course Totale (CT) et la Course
Différentielle (CD) qui est celle entre la position d'action et la
position de relâchement. On définit également la force
maximale d'enclenchement et le nombre de manoeuvres avant
détérioration.
En matière de caractéristiques
électriques, on distingue la tension nominale de fonctionnement, le
courant maximal et la nature du courant (continu ou alternatif). La
caractéristique essentielle des détecteurs sans contact est la
distance de détection maximale.
II-4-3-4 Critères de choix d'un capteur de
position
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
Le choix d'un capteur de position est le résultat
d'une profonde analyse de la partie opérative par rapport à la
commande du système automatique. Ce choix découle d'un processus
qui consiste en l'examen des différents points suivant:
· Type de capteur: capteur à fermeture (NF) ou
à ouverture (NO);
· Type d'information logique délivrée :
niveau logique maintenu (échelon) ou non (impulsion), rebonds
tolérés ou non;
· Type d'énergie: électrique ou
pneumatique, niveau minimal et maximal d'énergie (tension, courant,
pression), fréquence de fonctionnement, temps de réponse et de
rebondissement;
· Mode d'action: avec contact mécanique ou
non;
· Action mécanique: force nécessaire
à la manoeuvre, les différentes courses;
· Durée de vie: il tient compte du nombre de
manoeuvres ; pour les détecteurs électriques, il est fonction de
la tension, du courant et de la fréquence;
· Facteurs économiques: on distingue le
coût d'investissement qui englobe les accessoires et interfaces
nécessaires et le coût d'exploitation qui tient compte de la
consommation en énergie, de l'entretien ou du renouvellement du
capteur.
II-4-4 LES ACTIONNEURS II-4-4-1
Définition
Les actionneurs sont des organes qui convertissent
l'énergie d'entrée disponible sous une certaine forme
(électrique, pneumatique, hydraulique) en énergie utilisable sous
une autre forme. Ce processus est traduit par le schéma ci-dessous. On
distingue plusieurs types d'actionneurs : les moteurs, les vérins, les
résistances et les électro-aimants.
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann Page 38
Énergie Disponible
|
Actionneur
|
Énergie Utilisable
|
|
Fig.16 Structure d'un actionneur
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
II-4 PRINCIPE DE FONCTIONNEMENT
Lorsque toutes les sécurités ont
été vérifiées par l'automate, les cabines quittent
les stations à une vitesse voisine de 0,5 m/s pendant quelques
mètres pour atteindre progressivement la vitesse nominale de 12,5
m/s.
A l'arrivée, à proximité de la gare, les
cabines ralentissent une première fois, ensuite les cabines ralentissent
de nouveau, puis s'arrêtent aux quais de débarquement respectifs.
Le frein de service est actionné et les portes peuvent s'ouvrir.
Il est impératif d`arrêter les cabines de
manière imminente et à n'importe quelle position, pour des
raisons telles que `vents forts', `incohérence des informations issues
des capteurs de vitesse et de position des cabines'.Aussi, au
redémarrage, la machine motrice devra fournir le couple
nécessaire pour déplacer les cabines. Ce couple peut atteindre
des valeurs importantes, largement supérieures au couple nominal.
II-5 LES MODES D'EXPLOITATION
Afin de répondre en toute sécurité
à toutes les circonstances qui peuvent se présenter en cours
d'exploitation, l'opérateur dispose de quatre modes de marche :
· mode de marche automatique : Tout le cycle de
fonctionnement est pris en charge par les automates.
· mode de marche manuel : Le préposé
assure la totalité des opérations. La vitesse en
différents points du parcours est comparée à celle
définie pour la marche en automatique. S'il y a discordance, le
système est arrêté par action sur le Bpa.
· mode de marche exceptionnel : Ce mode de marche est
utilisé dans le cas de pannes d'automatisme importantes. La plupart des
sécurités sont inhibées. La vitesse est limitée
à 1 m/s.
· mode de marche secouru : L'entraînement est
assuré par un générateur électrique (Groupe
électrogène).
L'automate principal prend en charge :
· La commande des portes.
· L'élaboration des ordres de mouvement.
· L'élaboration des consignes de vitesse pour le
variateur.
· La gestion des défauts de fonctionnement.
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 39
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 40
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
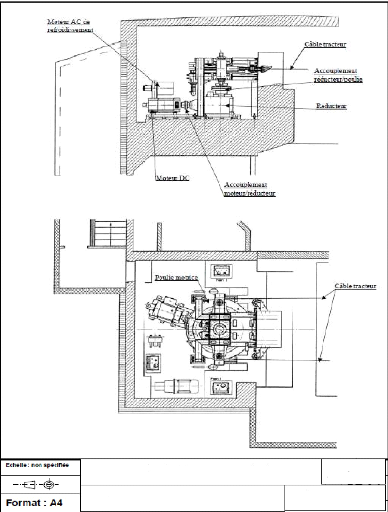
SALLE DES MACHINES
PROJET DE FIN DE CYCLE
MÉMOIRE
ANNÉE 2011
Fig.16 Vue d'une salle des machines
2011
CHAPITRE III :
ÉTUDE PRATIQUE
(Réalisation d'un
micro-téléphérique)
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 41
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann
Page 42
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Le PFE porte sur la conception d'un API adaptable constituant
notre centrale Informatique dont l'élément mère est le
microcontrôleur ATméga 168 D'Atmel qui doit gérer
tout notre système. Pour ce faire nous sommes donc emmené
à construire un environnement dans lequel le microcontrôleur sera
en mesure de recevoir des informations de natures différentes, de les
traiter, et de les restituer aux différents types d'actionneurs.
Le microcontrôleur est un circuit intégré
qui regroupe sur une même puce tous les éléments d'une
structure à base de microprocesseur.
Le microcontrôleur ATméga ou ATtiny font partie
de la grande famille de circuit AVR. Le catalogue d'Atmel ne contient que des
microcontrôleurs à architecture RISC. Il existe en effet toute une
gamme de circuits, compatible des célèbres 8051 d'Intel.
Par contre les circuits RISC d'Atmel sont tous regroupés sous le vocable
de microcontrôleurs AVR, divisés en deux groupes bien distincts au
moins en termes de performances. Celui des microcontrôleurs 8
bits et celui des microcontrôleurs 32 bits. Ils
présentent des représentations physiques diverses. Avec
l'évolution de la technologie visant à l'amélioration des
microcontrôleurs, plusieurs furent replacés par de nouveaux
microcontrôleurs détenant une technologie de pointe (Cas de l'AT90
replac é par ATméga et ATtiny).
C'est donc dans le but d'utiliser le microcontrôleur
performant que nous avions choisis l'ATméga 168 beaucoup
usité de nos jours. Sa représentation physique s'apparente
à celle de l'ATméga 88 et comporte au total 28
broches.
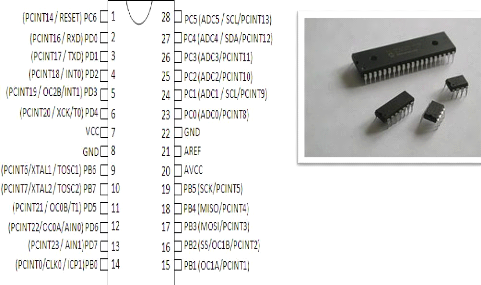
Img. 1 Microcontrôleur ATméga et
ATtiny
Fig.18 Description des différentes
Broches
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann Page 43
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
> Port B (PB7 à PB0) le Port B est un
port d'entrée-sortie à 8 bits bidirectionnel avec des
résistances internes de tirage (choisi pour chaque bit). Il sert aussi
comme oscillateur pour le Timer/Compteur2.
> Port C (PC6 à PC0) le Port C est
un port d'entrée-sortie à 7 bits bidirectionnel avec des
résistances internes de tirage (choisi pour chaque bit). Il sert aussi
de convertisseur analogique numérique.
> RESET(PC6) déclenché par
un front descendant maintenue plus de 50 ns il produira le Reset du
microcontrôleur.
> Port D (PD7à PD0) le Port D est
un port d'entrée-sortie à 8 bites bidirectionnel avec des
résistances internes de tirage (choisi pour chaque bit). Il sert aussi
d'USART et d'entrées pour les interruptions externes.
> XTAL1 Entrée de l'oscillateur
externe ou libre pour l'horloge interne.
> XTAL2 Production de l'amplificateur
d'oscillateur.
> AVCC est une broche de tension
d'alimentation pour le Convertisseur A/D qui doit être connectée
à VCC via un filtre passe-bas pour éviter les parasites.
> AREF est l'entrée de
référence analogue pour le Convertisseur A/D avec une tension
dans la gamme de 2 V à AVCC avec filtre passe-bas.
> GND (22) masse analogique. Si la masse
analogique est séparée de la masse générale,
brancher cette broche sur la masse analogiques, sinon, connecter cette broche
à la masse générale GND.
> VCC broches d'alimentation du
microcontrôleur (+3 à +5V).
> GND masse de l'alimentation.
Il se présente sous la forme d'un circuit
intégré réunissant tous les éléments d'une
structure à base de microprocesseur. Voici généralement ce
que l'on trouve à l'intérieur d'un tel composant :
> Un microprocesseur (C.P.U.) exécutant
séquentiellement les instructions stockées dans la mémoire
programme, il est généralement composé de :
· Un ou plusieurs registres accumulateurs contenant
temporairement les opérandes et les résultats des
opérations.
· Des registres auxiliaires permettant de relayer les
accumulateurs.
· Des registres d'index pour le mode d'adressage
indirect.
· Un compteur programme pointant l'adresse de la prochaine
instruction à exécuter.
· Une ALU permettant d'effectuer des opérations
entre l'accumulateur et l'opérande.
· Un registre code condition indiquant certaines
particularités en ce qui concerne le résultat de la
dernière opération (retenu, zéro, interruption).Toutes
fois il est important de signaler qu'il existe deux catégories de
microprocesseur : les CISC et les RISC.
> De la mémoire de donnée (RAM et EEPROM)
qui permet de mémoriser temporairement les données
générées par le microprocesseur pendant les
différentes phases du traitement numérique (résultats
d'opérations, etc...).
> De la mémoire programme (ROM, OTPROM, UVPROM ou
EEPROM) qui est uniquement accessible en lecture (dite mémoire morte).Sa
programmation nécessite une procédure particulière et un
matériel adéquat.
> Des interfaces parallèles pour la connexion des
entrées / sorties reparties sur plusieurs ports (maximum 8 bits),
permettent de prendre en compte des états logiques appliqués en
entrée ou de
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 44
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
gérer des signaux binaires en sortie. Les broches de
ces ports peuvent donc être configurées en entrée ou en
sortie, avec différentes options (résistances de rappel, sorties
collecteurs ouverts, interruption...). La configuration ainsi que l'état
logique de ces broches est obtenue par des opérations d'écriture
ou de lecture dans différents registres associés à chaque
port. On trouve généralement:
· Un registre de direction pour une configuration en
entrée ou en sortie,
· Un registre de donnée recopiant les états
logiques de chaque broche de port,
· Un registre d'option permettant plusieurs configurations
en entrée ou en sortie.
> Des interfaces séries (synchrone ou asynchrone)
pour le dialogue avec d'autres unités. Les données
envoyées ou reçues se présentes sous la forme d'une
succession temporelle (sur un seul bit) de valeurs binaires images d'un mot.
> Des timers pour générer ou mesurer des signaux
avec une grande précision temporelle.
> Des convertisseurs analogique / numérique pour le
traitement de signaux analogiques.
> Du chien de garde, qui empêche le plantage du
microcontrôleur tout en s'assurant qu'il n'y ait pas d'exécution
prolongé d'une même suite d'instruction.
La majorité des microprocesseurs et
microcontrôleurs utilisent actuellement une architecture interne dite
VON NEUMANN, c'est-à-dire une architecture commune
à celle que l'on rencontre habituellement dans les micro-ordinateurs.
La mémoire, appelée improprement de programme,
contient en fait des instructions et des données placées à
la suite les unes des autres et on ne dispose que d'un bus, appelé bus
de données, pour véhiculer tour à tour les codes des
instructions et les données qui leur sont associées. Si cette
architecture donne toute satisfaction comme nous en avons la preuve
éclatante chaque jour, elle pose quelques problèmes dès
que l'on veut faire fonctionner l'ensemble rapidement. En effet,
l'exécution d'une seule instruction nécessite plusieurs
échanges de données sur le seul et unique bus dévolu
à cet usage puisqu'il faut tout d'abord aller chercher le code de
l'instruction.
Il est alors préférable de faire appel à
une architecture dite HARVARD dans laquelle les instructions et les
données sont clairement différenciées. Ces
dernières sont contenues dans des mémoires différentes et
sont véhiculées sur des bus indépendants.
Bien sûr, vu de l'utilisation, cela ne change rien et
les circuits de ce type s'utilisent exactement comme les autres. Par contre,
les résultats obtenus, en termes de vitesse d'exécution de
programmes peuvent être impressionnants. En effet, l'exécution
d'une instruction ne fait plus appel qu'à un seul cycle machine puisque
l'on peut simultanément, grâce aux deux bus et aux deux
mémoires indépendants, rechercher le code de l'instruction.
Rompant avec une tradition bien établie, les microcontrôleurs AVR
d'Atmel utilisent une architecture HARVARD mais ce n'est pas tout. Ils font
également appel à une architecture de type RISC
qui, comme on le lit un peu trop souvent, ne se résume pas
simplement à disposer d'un jeu d'instructions réduits ; ce qui,
paradoxalement, n'est d'ailleurs pas le cas des circuits AVR.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 45
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable

Unité
Centrale Bus de données
Mémoire de programme contenant instructions et
données
Fig.19 Architecture Von Neumann

Mémoire de
données
Unité
Bus de données Centrale Bus
d'instructions
Mémoire de programme ne contenant que des
instructions
Fig.20 Architecture de Harvard
L'architecture RISC (ce qui veut dire circuit à jeu
d'instructions réduits) présente un avantage considérable
sur les microcontrôleurs. Un vrai circuit de type RISC doit
présenter un certain nombre de particularités propres à
accroître sa vitesse de fonctionnement.
Et tous microcontrôleurs conçus par cette
architecture utilisent des instructions codées sur un seul mot. Cela
présente deux avantages. Le premier est que tous les emplacements de la
mémoire de programme contiennent une instruction, le second est qu'un
seul cycle machine suffit pour lire le code complet d'une instruction,
d'où un gain en vitesse d'exécution. Les circuits RISC utilisent
en suite une structure PIPE LINE qui leur permet
d'exécuter une instruction tout en recherchant la suivante en
mémoire d'où, l'accroissement de la vitesse. Ils exécutent
toutes leurs instructions en un seul cycle machine ce qui est dû en
grande partie au codage de l'instruction sur un seul mot. L'Unité
Arithmétique et Logique, appelé encore « ALU », dispose
en effet en une seule fois de toutes les informations nécessaires
à l'exécution de l'instruction. Les instructions d'un circuit de
type RISC ont une structure aussi Orthogonale que possible,
c'est-à-dire que toutes les instructions peuvent être
exécutées sur tous les registres avec tous les modes d'adressage.
Cela signifie que le travail du programmeur, et donc le nôtre, car il
n'est plus nécessaire de retenir une multitude de cas particuliers
d'instructions qui ne fonctionnent que dans un mode ou dans l'autre.
Nota: Les microcontrôleurs AVR sont
réalisés en technologie CMOS haute vitesse, ce qui leur
confère tout à la fois une faible consommation, une vitesse de
fonctionnement importante et un haut niveau d'intégration. Ils adoptent
tous une véritable architecture RISC de type HARVARD et toutes les
instructions s'exécutent en seul cycle machine. De ce fait leur
puissance exprimée en MIPS (million d'instructions par seconde) est
égale à leur fréquence d'horloge.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann
Page 46
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
I- ÉTUDE LOGICIELLE
Les logiciels mis en oeuvre au pour notre réalisation
sont :
> AVR Studio 4 : la
simulation du programme de notre maquette
> KiCad : pour la saisie du schéma
de montage et le traçage du typon
I-1 AVR Studio
Une fois le logiciel est installé et l'icône se
trouve sur le bureau ou dans le menu Tous les programmes, lancer le
logiciel.
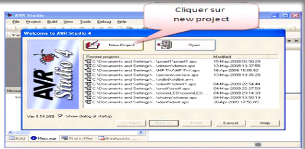
Img2. Menu d'accueil
I-1-1 Configuration
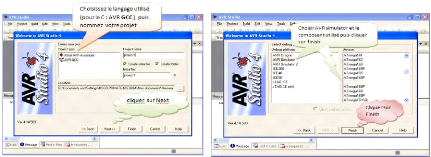
Img3. Options de configuration
I-1-2 Programmation
Après l'option de configuration c'est la saisie du
programme. Puis cliquons sur build pour la compilation avec le compilateur AVR
GCC.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 47
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
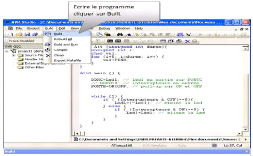
Img4. Compilation I-1-s Simulation
Le programme étant conçu, on peut alors
effectuer une simulation et en cliquant sur le nom d'un port, on peut observer
les changements d'état de ses bits conformément au programme. Sur
la figure ci-dessous, on observe l'état du port C.

Img5. Simulation
I-1-4 Contrôle du déroulement
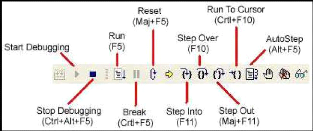
Img6. Menu contrôle
Run : Permet d'exécuter le programme.
Dans ce mode, le Workspace et la fenêtre Watch sont inaccessibles. Ce
mode se termine soit en cliquant sur Break, soit lorsque le logiciel rencontre
un
Projet de fin de cycle rédigé par MOELET
GOMA Jean Hermann Page 48
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Breakpoint. Ce mode est très utile pour sortir de
boucles d'attente de longue durée en mettant un Breakpoint sur la
première instruction après la boucle.
Break : Permet d'interrompre
l'exécution du programme lors qu'on est en mode Run ou AutoStep.
Reset : Comme son nom l'indique, recommence
le programme depuis le début.
Step Into : Mode pas-à-pas.
Exécute la seule instruction indiquée par la flèche jaune.
Si cette instruction fait appel à une sous-fonction, la fenêtre du
programme en cours s'ouvre sur cette sous-fonction et les instructions de cette
sous-fonction peuvent être exécutées en mode
pas-à-pas.
Step Over : Mode pas-à-pas
également, mais à la différence de Step Into s'il y a
appel d'une sous-fonction, celle-ci est exécutée
entièrement sans que l'on ne puisse suivre son déroulement.
Step Out : Termine la fonction en cours
d'exécution puis retourne au programme qui l'a appelée en
redonnant la main au développeur.
Run To Cursor : Exécute le programme
jusqu'au curseur.
AutoStep : Equivalent à Run mais ici
le développeur voit le Workspace et la fenêtre Watch. Le
déroulement est plus lent qu'en mode Run mais on peut voir ce qui se
passe dans le microcontrôleur ou les variables du programme.
I-1-5 Chargement du programme
Après avoir testé le programme en mode
simulation, on doit le transférer dans le composant via le programmateur
port parallèle et le logiciel AVR ISP.
I-1-6 Procédure
Brancher le connecteur P2 au port parallèle et le
connecteur P1 au circuit où le microcontrôleur est monté ;
nous avons deux cas de figure :
Si les connexions ne sont pas bonnes, la fenêtre
ci-après s'affichera
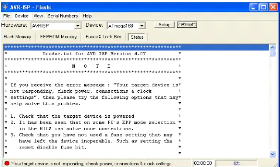
Img7. Fenêtre indiquant la non reconnaissance du
microcontrôleur utilisé
Si le câblage a été bien effectué,
le microcontrôleur utilisé sera immédiatement reconnu comme
illustré ci- dessous :
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 49
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
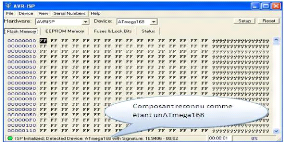
Img8. Fenêtre indiquant la reconnaissance du
composant
Si le composant est reconnu, on passe alors aux étapes
suivantes :

Img9. Chargement du programme
Une fois le chargement est signalé sur l'AVR ISP, il faut
aller chercher le fichier d'extension .hex pour le chargement.
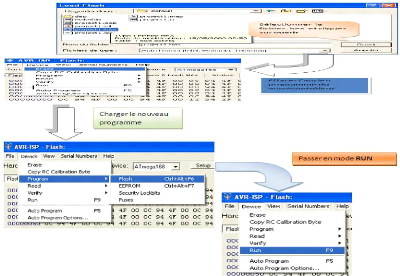
Img10. Fin du chargement
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 50
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
I-2 KICAD
La réalisation de la maquette commence par la saisie du
schéma, le routage et la réalisation du circuit
imprimé.
I-2-1 Le typon
Le typon est l'impression du tracé des pistes sur un
support transparent. La première étape de la réalisation
d'une carte électronique est la saisie du schéma structurel. Les
composants sont placés en utilisant les bibliothèques
intégrées, mais il est parfois nécessaire d'en
créer des nouveaux. Le logiciel KiCad nous a permis de faire la saisie.
KiCad est un logiciel libre de conception assistée par ordinateur qui
intègre à la fois un module de saisie de schémas et un
module de routage de circuits électroniques.

Img11. Fenêtre principale de KiCad
A l'aide de l'éditeur schématique, nous avions pu
dessiner notre schéma.
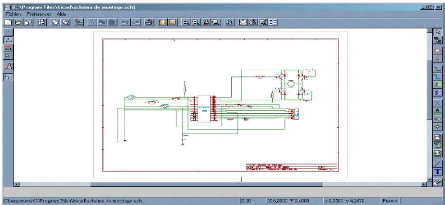
Img12. Fenêtre d'édition de schéma de
KiCad
Après l'édition du schéma, nous avons
vérifié les erreurs dans le schéma tel que non connexion,
court-circuit, polarisation... pour le faire on clique sur le «
Contrôle des règles électrique ». Une petite
flèche verte doit apparaître à l'endroit où se situe
l'erreur.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 51
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Img13. Contrôle des règles
électriques
Une fois la vérification terminée, il faut
générer une Net liste : Liste des composants utilisés et
de leurs connections. On clique sur le bouton « Génération
de la Net liste »
Img14. Lancement de génération de la Net
liste
Tous les composants doivent avoir être associés
à un boîtier ou une empreinte. On y associe les empreintes en
vérifiant que tous les composants aient une empreinte associée
correspondante aux boîtiers qui sont en stock c'est-à-dire les
composants qu'on dispose. Vérifiez que les pastilles des empreintes
aient une taille convenable. Une pastille trop petite disparaîtra ou sera
difficile à percer et souder. On clique sur le bouton « Appel de
CvPcb »

Img15. Appel de CvPcb
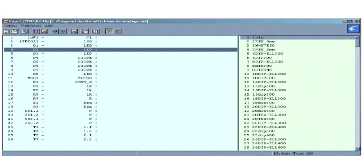
Img16. Fenêtre de CvPcb
Après l'association des composants et empreinte, on
lance l'éditeur de circuit imprimé en cliquant sur le bouton
« Appel de Pcbnew ».
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 52
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable

Img17. Appel de Pcbnew
Dans la fenêtre qui apparait, on importe les empreintes
en cliquant sur le bouton «Lire Net liste »

Img18. Lire Net liste
Dans la fenêtre suivante, on clique sur « Lire
». Les composants vont être placés dans le coin
supérieur gauche juste au-dessus de la page. On fait un clic droit sur
le composant et on choisit « Déplace Module » et on le place
au milieu de la page. On répète l'étape
précédente jusqu'à ce que tous les composants soient au
milieu de la page. A l'aide des boutons outils, on commence par tracer les
pistes.
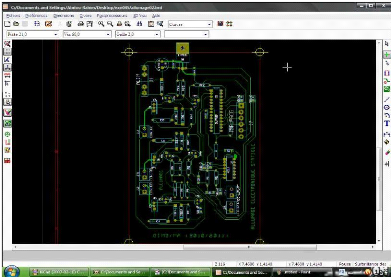
Img19. Traçage piste
Lorsqu'on fini le tracé des pistes, on exporte le fichier
au format « GERBER ».
On imprime le typon sur un papier calque, à l'aide d'une
imprimante. Pour ce faire, on lance la
visualisation Gerbée et on charge le typon à
imprimer.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 53
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
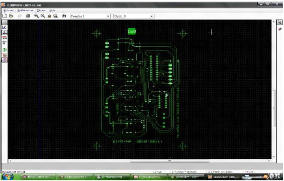
Img20. Typon à imprimer
I-3 PROGRAMMATION DE LA MAQUETTE
· Assignation des Entrées
# define Entrees PIN D
# define CaP1 (1<<PORT D0) # define CaP2 (1<<PORT
D2) # define Bpm (1<<PORT D4) # define Bpa
(1<<PORT C6)
· Assignation des Sorties
# define Sorties PORT C
# define LR (1<<PORT C1)
# define LJ (1<<PORT C0)
# define LO (1<<PORT B2)
# define M1 (1<<PORT C5) | (1<<PORT
C4)
# define M2 (1<<PORT ) |
(1<<PORT C3)
I-4 FONCTIONNEMENT DU SYSTÈME DE TRANSPORT
AÉRIEN PAR CÂBLE I-4-1 Cycle automatique
I-4-1-2 Condition initiale
Système au repos(LR), moteur éteint et cabines
présentent en gares avec activation au repos du capteur 1.Une fois ces
conditions sont remplies, on assiste au déroulement du cycle suivant
après action sur le bouton poussoir(Bpm) :
· Tourner moteur en premier sens (LJ allumée)
ensuite départ cabines
· Arrivée en gares des cabines, enclenchement du
capteur 2 avec arrêt du moteur et suivi d'une temporisation
· Tourner moteur en second sens (LO allumée)
ensuite départ cabines
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 54
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
· Arrivée en gares des cabines, enclenchement de
capteur 1 avec arrêt du moteur et suivi d'une temporisation,
ensuite reprise de cycle
I-4-1-3 Arrêt manuel du système
Notre système est muni d'un bouton poussoir
arrêt(Bpa) assimilé au RESET du système .Ce bouton poussoir
nous permet de mettre notre système hors-service ou de l'arrêter
sur le champ lors de son mouvement en cas d'éventuels incidents
(Exemple: déraillement du câble tracteur ; Vents violents, pluies
torrentiels etc ...).
I-4-1-4 Graphe de fonctionnement
> Actions à effectuer Actionneurs
·
|
Tourner moteur, Départ cabines (1er sens)
|
LJ
|
·
|
Tourner moteur, Départ cabines (2ème
sens)
|
LO
|
·
|
Arrêter moteur
|
LR
|
|
> Informations
|
Capteurs
|
·
|
Capteurs présence gare 1
|
Cap 1, Cap 2
|
·
|
Temporisation
|
T
|
·
|
Bouton poussoir marche
|
Bpm
|
·
|
Bouton poussoir arrêt
|
Bpa
|
|
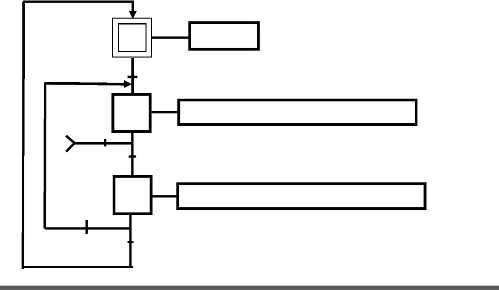
Repos
Activation au repos capteur 1, Départ
cycle
Tourne moteur (1er sens), Départ
cabines
Activation capteur 2, Temporisation
Tourne moteur (2ème sens), Départ
cabines
1
Arrêt cycle
0
2
Activation
capteur 1,
Temporisation
Arrêt cycle
0
I-4-1-4-1 Grafcet point de vue partie
opérative
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 55
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
I-4-1-3-2 Grafcet point de vue partie commande
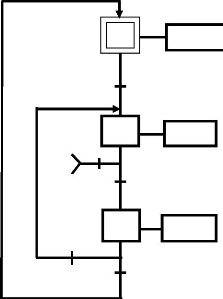
Cap 1. T
0
Bpa
0
2
1
Bpa
Cap 2.T
Cap 1.Bpm
LO
LJ
LR
Nota : Il y'a désenclenchement des capteurs
à chaque départ des cabines. Après chaque étape, il
y'a extinction d'une Led et allumage d'une autre à l'étape
suivante.
III- ÉTUDE MATÉRIELLE
II-1 CIRCUIT IMPRIME
Matériels à utiliser
La réalisation du circuit imprimé nécessite
quelques appareils et solution chimique.
· Insoleuse
· Plaque pré sensibilisée
· Graveur Perceuse
· Révélateur : (Hydroxyde de sodium)
· Le perchlorure de fer
· Acétone
· Bac
· Poste à souder
· Matériel de protection :(gang, lunette, cache
nez)
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 56
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Procédure
> L'insolation du circuit imprimé
Les étapes de l'insolation sont les suivantes :
· découper la plaque à la grandeur
désirée ;
· placer le typon sur la vitre de l'Insoleuse, face non
imprimée contre la vitre
· puis placer sur le typon la plaquette, face pré
sensibilisée (celle ou il y avait l'autocollant) contre le typon ;
· fermer l'Insoleuse et brancher la ; dès que les
tubes UV s'allument, lancer l e chronométrage ;
· puis débrancher une fois le temps requis
écoulé.
Nota : le temps d'insolation varie suivant les plaques de
2 à 5 minutes. > Révélation
(développement)
Cette étape consiste à éliminer les
parties de la couche de plaque sensible qui ont été soumise aux
UV. Cette opération s'effectue comme-suit :
· Porter la visière et les gants
· Mélanger 2.8g d'Hydroxyde de soude avec 400ml
d'eau
· Placer le mélange dans un bac
· Remplir le deuxième bac d'eau
· Plonger le circuit imprimé dans le premier bac en
remuant le bac; le tracé des pistes apparaît en quelques
instants
· Dès le tracé complément apparu,
retirer de suite le circuit et le rincer à l'eau en le plongeant dans le
deuxième bac et en remuant
· Finir le rinçage sous le robinet
> Gravure
La gravure consiste à ronger le cuivre aux endroits
non protégés par la résine photosensible. C'est
l'opération la plus longue, plus de 30 minutes. Il suffit d'immerger la
plaque pré sensibilisée dans la solution de perchlorure de fer,
produit brun très salissant. Il faudra le chauffer
légèrement, à 30-40 degrés, à l'aide d'une
résistance chauffante et l'agiter à l'aide d'une pompe soufflant
de l'air.
Nota: la quantité de perchlorure de fer est en
fonction de la durée de gravure.
> Enlèvement du vernis
Pour cette étape, nous utilisons de l'acétone et
un chiffon.
> Perçage et soudage
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 57
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
Une fois le circuit terminé, il ne reste plus qu'a le
percer. Les meilleurs résultats sont obtenus en utilisant une colonne de
perçage et des forêts de 0.8mm en carbure de tungstène.
Quelques trous doivent être faits en 0.9mm et 1mm.
Pour le soudage, un poste à souder électronique
dont l'entrée est 230V-50Hz et la sortie est 24W-48W est
nécessaire.
II-2 COMPOSANTS UTILISES ET COUT DE LA
RÉALISATION
Qté
|
Désignation
|
Caractéristiques
|
Observations
|
Prix
unitaire
(FCFA)
|
Prix
total
(FCFA)
|
10
|
Diodes
électroluminescentes
|
2V -10mA
|
Indicateur
d'étapes
|
50
|
500
|
2
|
Microcontrôleur
AVR ATméga 168
|
Is=40mA
U=1.8-5.5V
I=400mA
|
Aiguillage des
informations
|
6500
|
13000
|
5
|
Condensateur
|
0,1uF
|
Élimination
des parasites
|
300
|
1500
|
4
|
Transistors NPN
|
2N2222
|
-
|
800
|
3200
|
4
|
Diodes à jonction au silicium
|
1N4001;Pmax=0.25W
|
-
|
300
|
1200
|
1
|
Régulateur de
tension
|
LM7805
|
Régularise
l'alimentation
|
400
|
400
|
1
|
Moteur à courant
continu
|
AIRPAX 15V
IP 23-IK 02
|
Traction des
cabines
|
15000
|
15000
|
1
|
Porte circuit
|
14 x 2
|
-
|
500
|
500
|
1
|
Alimentation
|
16V
|
Alimenter
process
|
4000
|
4000
|
2
|
Barrette de
connexion
|
6 Broches
|
-
|
500
|
1000
|
2
|
Diodes zener
|
Uz=5V
|
Stabilisation
de la tension
|
500
|
1000
|
|
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
10
|
Résistances
|
1 KÙ Pmax=0.25W
|
-
|
300
|
3000
|
5
|
Résistances
|
10 KÙ Pmax=0.25W
|
-
|
400
|
2000
|
1
|
Résistances
|
330Ù Pmax=0.25W
|
-
|
200
|
200
|
1
|
Résistances
|
470Ù Pmax=0.25W
|
-
|
200
|
200
|
12
|
Poulies à une gorge
|
1.2 cm de diamètre
|
Faciliter le
coulissement
des cabines
|
250
|
3000
|
2
|
Poulies à double
gorge
|
1.2 cm de diamètre
|
Favoriser la
traction des
cabines
|
325
|
650
|
3
|
Poulies à une gorge
|
3.7 cm de diamètre
|
Entrainement
des cabines
|
500
|
1500
|
|
TOTAL
|
51.850
|
|
La réalisation de ce projet regroupe certains
composants ainsi que le résultat de l'estimation financière
(tableau ci-dessus).
III- CONCLUSION
Au terme des investigations, nous pourrons dire que
le chemin a été long. Mais, nous avons pu maîtriser le
principe de fonctionnement des Téléphériques en
général et le notre en particulier. Ce travail a confirmé
nos atouts que parfois nous sous-estimons .La réalisation d'un API
adaptable ainsi que les nombreux essais pour faire fonctionner le
système à l'aide de notre API n'a pas été facile
car nous avions été confronté à certaines
difficultés qui ont fait que les objectifs fixés au début
ne soient pas totalement atteints.
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 58
2011
CONCLUSION
GÉNÉRALE
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 59
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
Pour être complète, toute formation technique
doit être aussi pratique. C'est pourquoi dans la structure du
LMD/SYSTÈMES INDUSTRIELS il est prévu la réalisation d'un
projet de fin de formation.
En effet, ce projet de fin de formation en systèmes
industriels nous a permis d'approfondir les connaissances théoriques, de
cerner les difficultés liées à la pratique, de mener une
analyse d'automatisme.
Il est souhaitable qu'une telle expérience soit
maintenue dans la formation de l'étudiant, afin de lui permettre de
mieux préparer ses études et sa vie professionnelle.
Enfin, nous ne prétendons nullement avoir
réalisé un travail parfait exempté de toutes fautes et
erreurs car aucune oeuvre humaine n'est perfectible. C'est pourquoi nous
voudrions rester attentives aux critiques et suggestions pour
l'amélioration de ce projet de fin d'études.
Surtout que notre travail fasse l'objet d'une sérieuse
prise en compte et d'une judicieuse exploitation par les automaticiens.
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 60
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
BIBLIOGRAPHIE
· Guide technique RM2 - Conception générale
des téléphériques Version du 29 Janvier 2008 (STRMTG)
· Denis COGNIEL et LEHALLE, « Memotech: Equipement
et Installation Électrique », Éditions Casteilla, Paris
1992
· Catalogue ATMEL Rev. 2545- AVR-09/07
> WEBOGRAPHIE
www.remontees-mecaniques.net
· L'aiguille du midi publication du 17/08/2011
· Transport guidé publication du 24/08/2011
· La Téléphérique publication du
17/04/2011
· Le téléphérique du pic de midi
publication du 11/10 /2011
> AUTRES RESSOURCES
Mémoires
· Conception et Réalisation d'un microcalculateur
adaptable du système L-Jetronic des véhicules modernes à
essence. Projet de fin d'études du cycle d'Ingénieurs
présenté et soutenu par : Jannot HOUNSOUNOU.
· Conception et réalisation d'un portique de
lavage automatique de véhicule. Projet de fin d'études du premier
cycle réalisé et soutenu par : Mon Idée Abdiel
BISSADIDI.
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 61
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
2011

ANNEXE
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 62
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 63
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable

Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 64
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
|
(Téléphérique)
|
2011
|
|
|
|
TABLE DES MATIÈRES
|
PAGES
|
|
|
|
DÉDICACES
|
5
|
|
REMERCIEMENTS
|
6
|
|
SIGLES ET ABRÉVIATIONS
|
7
|
|
LISTES DES FIGURES ET IMAGES
|
|
|
AVANT-PROPOS
|
8
|
|
CAHIER DE CHARGE
|
9
|
|
RESSOURCES
|
10
|
|
CONTRAINTES
|
|
|
INTRODUCTION GÉNÉRALE
|
11
|
|
CHAPITRE I : GÉNÉRALITÉ SUR
LES MOYENS DE TRANSPORTS
|
12
|
|
AÉRIENS PAR CÂBLES ET SUR LE
TÉLÉPHÉRIQUE
|
|
|
I- GÉNÉRALITÉ SUR LES MOYENS DE TRANSPORTS
AÉRIENS
|
13
|
|
PAR CÂBLES
|
|
|
I-1 TYPOLOGIES
I-1-1 Appareils au sol
|
13
|
|
I-1-1-1 Le téléski
|
|
|
I-1-1-2 Le funiculaire
|
|
|
I-1-1-3 L'ascenseur incliné
|
|
|
I-1-2 Appareils
téléportés
|
|
|
I-1-2-1 La tyrolienne
|
|
|
I-1-2-2 Le
téléphérique
|
|
|
I-1-2-3 Le télécabine
|
|
|
I-1-2-4 Le funitel et DMC
|
|
|
I-1-2-5 Le
télésiège
I-2 INTÉRÊT DES MOYENS DE
TRANSPORT PAR CÂBLES
|
15
|
|
II- GÉNÉRALITÉ SUR LES
TÉLÉPHÉRIQUES
|
16
|
|
II-1 HISTORIQUE DU TÉLÉPHÉRIQUE
|
16
|
|
II-2 DISPOSITION
GÉNÉRALE
|
17
|
|
II-3 AVANTAGES ET INCONVÉNIENTS
|
17
|
|
II-3-1 Avantages
|
|
|
II-3-2 Inconvénients
|
18
|
|
II-4 INSTALLATION DU PROJET II-4-1
Introduction
|
18
|
|
II-4-2 Intérêt
économiques du fleuve CONGO
|
19
|
|
II-4-3 Approche de solution
|
19
|
CHAPITRE II : ÉTUDE DE
RÉALISATION
I- PRÉLIMINAIRES ET GÉNIE-CIVIL
II- ÉTUDE DU MATÉRIEL
II-1 DESCRIPTION TECHNIQUE
II-1-1 Schéma synoptique
II-1-2 Étude de chaque partie des blocs
II-1-2-1 Partie commande Bloc A
II-1-2-2 Partie opérative Bloc A
II-1-2-3 Partie opérative Bloc B
II-1-2-4 Zone de circulation Bloc A et B
II-1-2-5 Tableau récapitulatif par Bloc
des éléments avec leurs fonctions
II-2 ÉTUDE DE LA PARTIE
MÉCANIQUE
II-2-1 Motorisation principale
II-2-1-1 Système d'isolement thermique des
moteurs
II-2-1-2 Calcul de l'échauffement
II-2-3 Poulies (motrice et renvoies)
II-2-4 Câbles et cabines
II-3 ÉTUDE DE LA PARTIE
ÉLECTRIQUE
II-4 ÉTUDE DE LA PARTIE
ÉLECTRONIQUE
II-4-1 Variateur de vitesse
II-4-2 Automate programmable
II-4-2-1 Présentation
II-4-2-2 Structure
II-4-2-2-1 L'unité centrale de traitement
II-4-2-2-2 Zone ou espace mémoire
II-4-2-2-3 Modules ou cartes entrées /sorties
II-4-2-2-4 Modules des fonctions spécifiques
II-4-2-2-5 Bloc d'alimentation
II-4-2-2-6 Bus internes et externes
II-4-2-2-7 Fonctionnement d'un automate
Programmable
II-4-3 Les capteurs
II-4-3-1 Généralités sur les capteurs en
automatismes
II-4-3-2 Les capteurs de position
II-4-3-3 Caractères principales des capteurs
II-4-3-4 Critères de choix d'un capteur de position
II-4-3 Les actionneurs
II-4-4-1 Définition
II-4-4-2 Les moteurs électriques
II-4 PRINCIPE DE FONCTIONNEMENT
II-5 LES MODES D'EXPLOITATIONS
21
22
22
22
26
33
34
42
42
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 65
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
|
(Téléphérique)
|
2011
|
|
|
|
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
CHAPITRE III : ÉTUDE PRATIQUE
|
44
49 49 53 56
56
|
|
I- ÉTUDE LOGICIELLE
I-1 AVR STUDIO 4
I-2 KICAD
I-3 PROGRAMMATION DE LA MAQUETTE
I-4- FONCTIONNEMENT DU
SYSTÈME DE TRANSPORT
AÉRIEN PAR CÂBLES
|
|
I-4-1-1 Cycle automatique
|
|
|
I-4-1-2 Condition initiale
|
|
|
I-4-1-3 Graphe de fonctionnement
|
|
|
I-4-1-3-1 Grafcet de fonctionnement vue
partie opérative
|
|
|
I-4-1-3-2 Grafcet de fonctionnement
vue partie
|
|
|
Commande
|
|
|
II- ÉTUDE DU MATÉRIELLE
|
58
|
|
II-1 CIRCUIT IMPRIME
|
58
|
|
Matériels utilisés
|
|
|
Procédure
|
|
|
II-2 COMPOSANTS UTILISES ET COUT
ESTIMATIF DE LA
|
60
|
|
RÉALISATION
|
|
|
III- CONCLUSION
|
61
|
|
CONCLUSION GÉNÉRALE
|
62
|
|
Webgraphie
|
64
|
|
Bibliographie
|
|
|
Autres ressources
|
|
|
ANNEXE
|
65
|
|
Schéma de montage
|
66
|
Projet de fin de cycle rédigé par MOELET GOMA Jean
Hermann Page 66
| 

