|
Une Approche de protocole de Géocasting
sécurisé dans
un Réseau de Capteurs sans fil déployés dans
l'espace
KEUMBOUK DONFACK ANGE ANASTASIE
27 juillet 2016
Dédicaces
i
A mes parents:
KEUMBOUK Robert & TONFAC Marthe Huguette Aurelie
ii
Remerciements
En préambule à ce travail, je souhaiterais
adresser mes remerciements les plus sincères à toutes les
personnes qui m'ont aidée, de près ou du loin, dans la
réalisation de ce travail.
Tout d'abord et avant tout, je remercie vivement le bon Dieu,
le tout puissant qui nous guide le chemin droit, de m'avoir permis d'emprunter
le chemin de la recherche et de m'avoir donné suffisamment de courage et
de patience pour accomplir ce travail.
. Ma profonde gratitude et mes sincères remerciements
vont également à l'encontre de :
· Pr. TAYOU DJAMEGNI Clémentin, qui grâce
à ses précieux conseils et ses multiples remarques, m'a
donné le goût de la recherche; une fois de plus, merci
Professeur.
· Mon encadreur Dr. BOMGNI Alain Bertrand , qui a cru en
mes capacités et m'a permis de mener à bien mes travaux. Ce
mémoire doit beaucoup à ses conseils précieux, à sa
rigueur, son sens du travail bien fait, à son calme et à sa
disponibilité.
· FOKO SIDJOUNG Landry, pour sa disponibilité,
son aide, ses conseils, et pour toutes les prestigieuses remarques qu'il a fait
à mon encontre afin d'améliorer ce travail.
· Tous les enseignants du département de
Mathématiques-Informatique de l'université de Dschang, et plus
particulièrement aux Docteurs TCHOUPE TCHENDJI Maurice, KENGNE TCHENDJI
Vianey, FUTE TAGNE Elie, TCHEKA, pour m'avoir permis de rêver et de
poursuivre mes études dans ce merveilleux domaine qu'est
l'informatique.
· Mon camarade KENFACK ZEUKENG Ulrich, qui était
toujours là, prêt à m'aider , me conseiller et me
déboguer face à une difficulté rencontrée.
· Mon père, papa KEUMBOUK ROBERT, qui m'a
toujours soutenu, encouragé, et motivé; et qui, grâce
à ses multiples remarques sur la vie me permet de me remettre toujours
en question, et de chercher à atteindre le sommet.
· Ma mère, Maman KEUMBOUK MARTHE HUGUETTE qui a
toujours été là pour moi dans tout les domaines de ma vie
à me soutenir et m'encourager. Sa confiance, sa tendresse et sa
prière me guident tous les jours.
· Mon Bien-aimé MODESTE DOUNTIO pour tous les
conseils et soutiens multiformes qu'ils ne cessent de m'offrir.
· Mes frères Boris, Vital et Vanneck , mes soeurs
Marie Laure et Cynthia , pour tout leur soutien et le sens de l'écoute
qu'ils ont toujours sû développer à mon égard.
· Tous mes camarades de promotion, et mes voisins de
cité avec qui j'ai toujours passé d'agréables moments.
· Enfin, je remercie tous ceux qui ont contribué
de près ou de loin pour la réalisation de ce travail, tous ceux
qui m'ont accompagné et soutenu et que j'ai pas cité.
iii
Résumé
Composés d'appareils fortement limités en
ressources (puissance de calcul, mémoire et énergie disponible)
et qui communiquent par voie hertzienne, les réseaux de capteurs sans
fil composent avec leurs faibles capacités pour déployer une
architecture de communication de manière autonome, collecter des
données sur leur environnement et les faire remonter jusqu'à
l'utilisa-teur. Des « transports intelligents » à la
surveillance du taux de pollution environnemental, en passant par la
détection d'incendies ou encore l'« internet des objets », ces
réseaux sont aujourd'hui utilisés dans une multitude
d'applications. Certaines d'entre elles, de nature médicale ou militaire
par exemple, ont de fortes exigences en matière de
sécurité. Dans les RCFs, la sécurité et la
conservation d'énergie sont deux aspects importants et
nécessaires à considérer. Particulièrement, la
sécurité permet de s'assurer qu'un tel réseau ne sera pas
sujet des attaques qui concernent la lecture, la modification et la destruction
des informations tandis la conservation de l'énergie permet de prolonger
le cycle de vie du réseau tant il est vrai que l'énergie des
noeuds capteurs est extrêmement limitée, non rechargeable et non
remplaçable.
Les travaux de ce mémoire se concentrent sur le
problème du géocasting. le géocasting ou le
multi-géocasting dans un RCSF est la livraison des paquets de la source
à tous les noeuds situés dans une ou plusieurs zones
géographiques. L'objectif du protocole de géocasting est la
garantie de livraison et le moindre coût de transmission. De nombreux
protocoles de géocasting ont été proposés dans la
littérature. Mais ces protocoles s'appliquent sur des capteurs
déployés sur une surface plane, or l'espace de déploiement
peut présenter des irrégularités. Ainsi, il est
nécessaire de concevoir des protocoles de géocasting prenant en
compte ces irrégularités. Nous considérons une
architecture virtuelle de réseau de capteurs anonymes en dimension 3
(3-D), centré sur une station de base (noeud sink). Dans un premier
temps, nous proposons un algorithme de géocasting avec garantie de
livraison et avec une surcharge de réseau moindre que ceux des
protocoles existants. Par la suite, nous intégrons la
sécurité et la conservation d'énergie. En effet, nous
avons proposé un protocole efficace et sécurisé de
géocasting dans un RCSF déployé dans l'espace, avec
garantie de livraison des paquets de la source vers tous les noeuds
situés dans une ou plusieurs régions géocast.
Mots clés : Géocasting,
Multi-géocasting, Réseaux de Capteurs Sans Fil, Énergie,
Par-titionnement, Partitionnement hiérarchique, Architecture virtuelle,
Conservation de l'énergie, Sécurité, 3D, Simulation.
iv
Abstract
Wireless sensor networks are made of small devices with low
resources (low computing power, little memory and little energy available),
communicating through electromagnetic transmissions. In spite of these
limitations, sensors are able to self-deploy and to auto-organize into a
network collecting, gathering and forwarding data about their environment to
the user. Today those networks are used for many purposes : «intelligent
transportation», monitoring pollution level in the environment, detecting
fires, or the «Internet of things» are some example applications
involving sensors. Some of them, such as applications from medical or military
domains, have strong security requirements. In WSNs, security and economy of
energy are two important and necessary aspects to consider. Particularly,
security helps to ensure that such a network is not subject to attacks that
involve reading, modification or destruction of information while economy of
energy prolong the network life as the energy supply for sensor nodes is
usually extremely limited, non-rechargeable and non-replaceable.
In this work, we are interested in the problem of geocasting.
Geocasting or Multi-Geocasting in wireless sensor network is the delivery of
packets from a source (or sink) to all the nodes located in one or several
geographic areas. The objectives of a geocasting (multi-geocasting) protocol
are the guarantee of message delivery and low transmission cost. The existing
protocols which guarantee delivery run on network in which each node has an ID
beforehand. They either are valid only in dense networks or must derive a
planar graph from the network topology. But protocols with sensors in the space
has not yet been well defined. Hence the nodes may be adapted in order to carry
out huge operations to make the network planar. Firstly, we consider a 3-D
virtual sensors anonymous network architecture and derive geocast and
multi-geocast algorithms that guarantee delivery and that need less overhead
with respect to the existing protocols. They are both suitable for networks
with irregular distributions with gaps or obstacles and dense networks. Then,
we add security and energy-efficient issues. Effectively, we propose an
energy-efficient and secure geocast algorithm for wireless sensor networks
spread in the space, with guaranteed delivery of packets from the sink to all
nodes located in several geocast regions by consider à virtual
architecture in 3D.
Keywords : Geocast, Multi-geocast, Wireless
Sensor Networks, Clustering, Hierarchical Clustering, Virtual architecture,
Energy Efficiency, Security, simulation, Energy.
v
Table des matières
Dédicaces i
Remerciements ii
Résumé iii
Abstract iv
Table des figures viii
Liste des tableaux x
Liste des abréviations et acronymes
xi
Introduction 1
Introduction générale 1
Contexte d'étude 1
Objectifs 1
Problématique 2
Organisation du travail 2
1 Généralités sur les
Réseaux de Capteur Sans Fil 3
1.1 Introduction 3
1.2 Définition et architecture d'un capteur 4
1.3 Caractéristiques et Contraintes des RCSFs 6
1.3.1 Caractéristiques liées aux noeuds capteurs
6
1.3.2 Caractéristiques liées au RCSF 7
1.3.3 Contraintes 7
1.4 Architecture d'un RCSF 8
1.5 Les enjeux fondamentaux d'un RCSF 9
1.6 Applications des Réseaux de capteurs Sans Fil 10
1.7 Conclusion 11
2 Les Protocoles de Clustering dans les Réseaux
de Capteurs Sans Fil 13
2.1 Introduction 13
vi
TABLE DES MATIÈRES
|
2.2
2.3
2.4
|
Principe du Clustering dans les RCSF
Partitionnement Centré sur le noeud
2.3.1 Algorithme de clustérisation de Basagni : DCA, DMAC
et GDMAC .
Partitionnement centré sur le Cluster
|
14
15
15
17
|
|
|
2.4.1 Partitionnement en Clique : Algorithme de Sun et al.
18
|
|
|
|
2.4.2 Partitionnement pour un contrôle hiérarchique
: Algorithme de Banerjee
|
|
|
|
et al.
23
|
|
|
|
2.4.3 Architecture virtuelle d'un réseau de capteurs :
Algorithme de clustéri-
|
|
|
|
sation de A. Wadaa et al.
25
|
|
|
|
2.4.4 partitionnement en 3D
|
27
|
|
2.5
|
Conclusion
|
35
|
3
|
Sécurité dans les Réseaux de
Capteurs Sans Fil
|
36
|
|
3.1
|
Introduction
|
36
|
|
3.2
|
Principes d'attaques et d'attaquants
|
37
|
|
3.3
|
Politiques de sécurité dans les RCSFs
|
38
|
|
3.4
|
Taxonomie des attaques
|
38
|
|
|
3.4.1 Attaques passives
|
39
|
|
|
3.4.2 Attaques actives
|
39
|
|
|
3.4.3 Attaques physiques
|
42
|
|
3.5
|
Mécanismes de sécurité
|
42
|
|
|
3.5.1 Le partitionnement de données
|
42
|
|
|
3.5.2 La cryptographie
|
43
|
|
|
3.5.3 Détection d'intrusions
|
44
|
|
3.6
|
Conclusion
|
44
|
4
|
Protocoles de Geocasting dans les réseaux de
capteurs sans fil
|
45
|
|
4.1
|
Introduction
|
45
|
|
4.2
|
Algorithmes de géocasting sans garantie de livraison.
46
|
|
|
|
4.2.1 Algorithme de KO-VAIDYA
|
46
|
|
|
4.2.2 Les protocoles LBM,VDBG,GeoGRID et GeoTORA
|
47
|
|
4.3
|
Algorithme de géocasting avec garantie de livraison
|
48
|
|
|
4.3.1 Algorithme de Seada et Helmy
|
48
|
|
|
4.3.2 Algorithme de Bomgni et al
|
49
|
|
|
4.3.3 Protocole de Myoupo et al.
51
|
|
|
4.4
|
Conclusion
|
55
|
|
5 Notre contribution : Une approche de protocole de
géocasting sécurisé dans
un RCSF déployé dans l'espace (en 3D)
56
5.1 Introduction 57
vii
TABLE DES MATIÈRES
5.2 Notre approche de sécurité 57
5.2.1 Au pré-déploiement 59
5.2.2 Phase de Construction 59
5.2.3 Phase de reconstruction 60
5.2.4 Phase de renouvellement 60
5.2.5 Phase de révocation 60
5.2.6 Insertion des nouveaux noeuds 61
5.3 Étape 1 : Formation sécurisée de la
structure 61
5.3.1 Partitionnement sécurisé du réseau en
cluster 61
5.3.2 Identification des noeuds 62
5.3.3 Découverte de voisinage 62
5.3.4 Construction et Définition de notre arbre couvrant
le graphe 63
5.3.5 Routage sécurisé inter-cluster 63
5.3.6 Routage sécurisé intra-cluster 65
5.3.7 Élection du Cluster Head 65
5.4 Étape 2 : Protocole sécurisé de
géocasting 69
5.4.1 Geocasting avec plusieurs régions géocast
70
5.5 Analyse de la sécurité 71
5.6 Analyse de la consommation de l'énergie 71
5.7 Implémentation et Analyse des résultats 72
5.7.1 Les métriques 73
5.7.2 Nombre et la taille des clés stockées
73
5.7.3 Nombre de paquets échangés 74
5.7.4 Consommation d'énergie 75
5.8 Conclusion 77
6 Conclusion Générale 78
Conclusion générale 78
6.1 Bilan 78
6.2 Perspectives 79
Bibliographie 80
viii
Table des figures
1.1 Anatomie d'un capteur, [1] 4
1.2 Fonction d'un capteur, [2] 4
1.3 Exemple de capteur, [3] 5
1.4 Architecture d'un capteur [2] 6
1.5 Exemple d'un réseau de capteur sans fil [4] 8
2.1 Exemple de topologie basée sur des clusters
14
2.2 Exemple de Partitionnement du réseau par
l'algorithme DCA 17
2.3 Un graphe à 8 sommets à clustériser
par l'algorithme de Sun et al 20
2.4 Le graphe clustérisé à la fin de
l'étape 2 de l'algorithme de Sun et al. 21
2.5 Le graphe final clustérisé en utilisant
l'algorithme de Sun et al 22
2.6 Formation de clusters par l'algorithme de Banerjee et al.
24
2.7 Architecture Virtuelle 26
2.8 Système de coordonnées dynamiques 28
2.9 Formation des couronnes 29
2.10 Formation des couronnes pour k = 4 30
2.11 Étiquetage et parcours 30
2.12 Formation des sections horizontales 32
2.13 Les différents angles d'émission du noeud
sink pour m = 8. 34
2.14 Formation des sections verticales 34
2.15 Récapitulatif pour la formation des clusters de la
sphère la plus interne 35
3.1 Stratégies de sécurité dans un RcSF
38
3.2 Types d'attaques actives 39
3.3 Technique de partitionnement des données 43
3.4 Principe de la cryptographie 43
4.1 succès/Echec de livraison de paquets lors de
l'exécution du schéma à zone adaptée 47
4.2 Protocole de découverte de voisins 50
4.3 BS
network cutting with Cp = 0.5 and Ca = 40°. Here, we take the second
level
formation case. Broadcast step 53
ix
TABLE DES FIGURES
5.1
|
Réseau de capteurs déployé dans l'espace
|
57
|
5.2
|
petit aperçu de la structure de notre arbre
|
63
|
5.3
|
Routage dans un réseau dense
|
64
|
5.4
|
Nombre de paquets échangés en absence d'intrus
|
75
|
5.5
|
Nombre de paquets échangés en présence
d'intrus
|
75
|
5.6
|
Évolution de l'énergie des capteurs
|
76
|
5.7
|
Évolution de l'énergie lors du déroulement
de deux protocoles avec 400 capteurs
|
76
|
|
x
Liste des tableaux
2.1
|
Calcul des angles de transmissions horizontales pour m=4
|
33
|
2.2
|
Calcul des angles de transmissions horizontales pour m
= 8.
|
33
|
5.1
|
Taille des clés ECC et de leurs paramètres de
calcul
|
74
|
5.2
|
Le nombre et la taille des clés stockées dans
notre méthode
|
74
|
|
Liste des abréviations et acronymes
Abréviations
BS CH
Description
Base station
Cluster
Head
DSN
DCA
DMAC
GDMAC
IP
RCSF
ECC
GPS
MAC
MANET
NS-2
LBM
WSNs
VDBG
ASP
ACK
CDMA
CSMA/CA
CTS
FDMA
NAV
RTS
TDMA
TRAMA
LMC
TESLA
WATS
ADC
DPR
Diviser Pour Régner
xi
Distributed Sensor Network
Distributed Clustering Algorithm
Distributed and Mobility-Adaptive Clustering
Generalized Distributed and Mobility-Adaptive Clustering
Internet Protocol
Réseau de Capteur Sans Fil
Elliptic Curve Cryptography
Global Positioning System
Media Access Control
Mobile Ad Hoc Network
Network Simulator 2nd
version
Location Based Multicast
Wireless Sensors Networks
Voronoi Diagram Based Geocasting
Acknowledge System Positioning
Acknowlegment
Code DivisionMultiple Access
Carrier Sense Multiple Access/Collision Avoidance
Clear ToSend
Frequency Divisio nMultiple Access
Network Allocation Vector
Request To Send
Time Division Multiple Access
Traffic-adaptive medium access protocol
Local Maximum Clique.
Timed Efficient Stream Loss-tolerance Authentification
Wide Area Tracking System.
Analog to Digital Converter
1
Introduction Générale
Contexte d'étude
Les progrès observés dans les domaines de la
micro-électronique, de la micro-mécanique et dans le
perfectionnement des techniques de communication ont permis aux chercheurs et
industriels de développer et de produire à moindre coûts
des composants électroniques de tailles très réduites. Ces
micro-composants sont utilisés dans la confection d'appareils permettant
la surveillance de zones géographiquement étendues,
l'acquisition, le traitement et la transmission de données
extrêmement sensibles. De ce fait, s'est développé un
nouveau type de réseau appelé réseau de capteurs sans fil,
dans lequel des capteurs communiquent entre eux en utilisant des connexions non
filaires. Les capteurs sont des petits dispositifs dont la fonction principale
est de collecter les informations concernant l'environnement dans lequel ils
sont déployés et de les acheminer vers d'autres capteurs ou vers
une station de base (encore dénommée noeud sink). Les
réseaux de capteurs sans fil sont souvent caractérisés par
un déploiement dense et à grande échelle dans des
environnements limités en terme de ressources. Les limites
imposées sont d'une part énergétiques car ils sont
généralement alimentés par des piles. Recharger les
batteries dans un réseau de capteurs est parfois impossible en raison de
l'emplacement des noeuds, mais le plus souvent pour la simple raison que cette
opération est pratiquement ou économiquement infaisable. Il est
donc largement reconnu que la limitation énergétique est une
question incontournable dans la conception des réseaux de capteurs sans
fil en raison des contraintes strictes qu'elle impose sur sa conception.
Motivation et Objectifs
Dans le cadre de notre travail, nous allons supposer que le
réseau n'est pas mobile; autrement dit, les capteurs ne peuvent pas se
déplacer dans la zone de perception. Notre objectif est de
définir une approche de protocole sécurisé de
géocasting dans un réseau de capteurs sans fil
déployé dans l'espace. Ce protocole sera économe en
énergie, diminuera la charge de travail des CHs et évitera de
surestimer la mémoire des capteurs du réseau. Ainsi, la
stratégie adoptée dans cette approche repose sur une technique de
partitionnement en 3D permettant de minimiser la consommation de
l'énergie durant le processus de livraison des paquets. Les
différents challenges auxquels nous allons être confrontés
sont multiples. Il sera question d'abord de maitriser les
2
Introduction générale
enjeux,les caractéristiques et les
problématiques des RCSFs; ensuite, présenter les
différents protocoles de clustering et de géocasting qui ont
retenu notre a attention dans la littérature; et enfin, nous allons
présenter une approche de protocole sécurisé de geocasting
en dimension 3.
Problématique
La caractéristique principale d'un réseau de
capteurs sans fil est qu'un noeud peut solliciter d'autres noeuds comme lui
dans son voisinage pour retransmettre des paquets de données dont le
destinataire serait hors de sa propre portée. les paquets envoyés
par une station peuvent ne pas être reçu par tous les noeuds
situés dans une zone précise. En effet, la station de base peut
être amenée à envoyer des instructions aux capteurs
situés dans une région bien précise. Dans ce cas, il
s'agit de résoudre efficacement le problème de multicast
géographique bien connu sous le nom "géocasting". Le
géocasting est un procédé qui consiste à envoyer
des données à une poignée de capteurs situés dans
une région d'intérêt (région géographique)
appelée région géocast. En outre, Une des contraintes
principales dans les réseaux de capteurs sans fil est la protection des
communications. les réseaux de capteurs sont vulnérables à
différents types d'attaques qui peuvent être lancées de
façon relativement simple. En particulier, la nature des communications
sans fil facilite l'écoute clandestine permettant ainsi une analyse
facile du trafic réseau. Il est donc d'un grand intérêt
pour tous les protocoles destinés à fonctionner dans les
réseaux de capteurs sans fil critiques d'intégrer des
mécanismes de sécurité efficace et peu couteux. De plus,
la majorité des protocoles de geocasting existants ne s'appliquent que
dans le cas où les capteurs sont déployés dans le plan. Or
la réalité voudrait que ces protocoles puissent prendre en compte
un réseau où les capteurs sont déployés dans un
espace sujets à des irrégularités, ou simplement quand les
capteurs sont déployés dans un espace, tout en tenant compte de
la consommation d'énergie.
Organisation du travail
Ce mémoire est organisé de la façon
suivante: dans le chapitre 1 nous faisons une généralité
sur les réseaux de capteurs en insistant sur l'architecture physique des
capteurs, les caractéristiques, les contraintes et les domaines
d'application des RCSFs. Le chapitre 2 sera consacré à la
présentation de quelques protocoles de partitionnement des RCSFs. Le
Chapitre 3 quant à lui sera réservé à la
sécurité dans les RCSFs. Au chapitre 4, nous présentons
quelques protocoles de géocasting avec garantie de livraison qui ont
déjà été réalisés et sur lesquels
nous allons nous baser pour établir le notre. Le chapitre 5 quant
à lui est réservé à notre contribution et aux
résultats des simulations que nous avons effectués. Une
conclusion générale sera dégagée à la
lumière de tout ce qui précède ainsi que quelques
perspectives.
3
Chapitre 1
Généralités sur les Réseaux
de Capteur
Sans Fil
Sommaire
|
|
1.1
1.2
1.3
|
Introduction
Définition et architecture d'un capteur
Caractéristiques et Contraintes des RCSFs
|
3
4
6
|
|
1.3.1 Caractéristiques liées aux noeuds capteurs
|
6
|
|
1.3.2 Caractéristiques liées au RCSF
|
7
|
|
1.3.3 Contraintes
|
7
|
1.4
|
Architecture d'un RCSF
|
8
|
1.5
|
Les enjeux fondamentaux d'un RCSF
|
9
|
1.6
|
Applications des Réseaux de capteurs Sans Fil
|
10
|
1.7
|
Conclusion
|
11
|
|
1.1 Introduction
Les progrès récents dans les domaines de
micro-électronique et des communications sans fil ont abouti au
développement de très petits capteurs dont l'anatomie est
présentée à la figure1.1. Leur remarquable essor est
dû à leur taille de plus en plus réduite, leurs prix de
plus en plus faible ainsi que leur support de communication sans fils attrayant
peu encombrant mais également peu de ressources. Ces capteurs peuvent
être déployés n'importe où pour assurer des
fonctions de surveillance ou autres. Le réseau ainsi établi est
appelé Réseau de Capteurs Sans Fils (RCSF ou Wireless Sensor
Network), composé d'un nombre souvent très important de noeuds
qui sont, soit posés à un endroit précis, soit
dispersés aléatoirement (souvent déployés par voie
aérienne à l'aide d'avions ou hélicoptères). Une
fois déployés, les noeuds coopèrent entre eux d'une
manière autonome afin de collecter et de transmettre des données
vers une station de base dans le but de surveiller et/ou de contrôler un
phénomène donné.
CHAPITRE 1. GÉNÉRALITÉS SUR LES
RÉSEAUX DE CAPTEUR SANS FIL
1.2 Définition et architecture d'un capteur
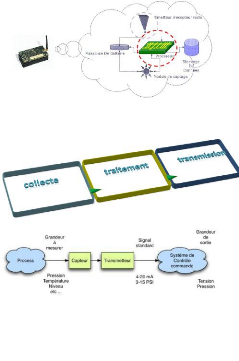
FIGURE 1.1: Anatomie d'un capteur, [1]
FIGURE 1.2: Fonction d'un capteur, [2]
4
Un capteur peut être définie comme un petit
appareil électronique qui convertit une grandeur physique reçu
précédemment en une quantité numérique sur laquelle
des traitements peuvent être effectués [1]. Ces capteurs, non
autonomes doivent donc être connectés à un appareil capable
d'en interpréter la mesure, puis, selon l'usage souhaité
permettre l'utilisation. Chaque capteur assure trois fonctions principales :
la collecte, le traitement et la
communication de l'information vers un ou plusieurs points de
collecte appelés station de base (figure 1.2); et comporte cinq grandes
caractéristiques : une faible capacité de stockage, une source
autonome d'énergie limitée, une faible puissance de calcul, un
rayon de transmission et un rayon de perception. Le rayon de transmission d'un
capteur définit la circonférence dans laquelle doit se trouver un
autre capteur pour que ceux-ci puissent communiquer directement, tandis que le
rayon de perception définit la circonférence maximale dans
laquelle un capteur peut collecter ou capter des informations [3]. Suivant le
type d'application, il existe plusieurs types de capteurs : les capteurs de
température, d'humidité, de pression, etc. malgré cette
diversité apparente, ils restent dotés d'une architecture
matérielle similaire. Un capteur est doté principalement de
quatre unités[5, 6] tel que représenté
à la figure 1.4 : unité de captage ou d'acquisition (encore
appelée unité de capture), unité de traitement,
unité de communication et unité d'énergie. Des composants
additionnels peuvent être ajoutés selon le domaine d'application,
comme par exemple un système de localisation de l'environnement tel
qu'un GPS, d'un système de mobilité mais
5
CHAPITRE 1. GÉNÉRALITÉS SUR LES
RÉSEAUX DE CAPTEUR SANS FIL
aussi parfois d'un générateur d'énergie
(exemple : cellule solaire). L'unité de Captage ou
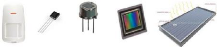
FIGURE 1.3: Exemple de capteur, [3]
d'acquisition ("Sensing unit") est
responsable de la collecte des données. Elle est composée de deux
dispositifs : un dispositif de capture physique qui prélève
l'information de l'environnement local(dispositif de transformation des
données interceptées en signaux analogiques) et un convertisseur
analogique/numérique appelé ADC ( dispositif de conversion de ces
signaux analogiques en signaux numériques compréhensibles par
l'unité de traitement).
L'unité de traitement ("Processing
unit")quant à lui, est l'unité principale du capteur.
Généralement Composée d'un microprocesseur et d'une
mémoire de stockage (processeur couplé à une
mémoire vive), il a pour rôle de contrôler le bon
fonctionnement des autres unités en effectuant des traitements sur les
données captées en exécutant les commandes et les
instructions contenues dans les protocoles de communication
pré-chargés sur le capteur. Elle est équipée de
deux interfaces : i) interface par unité d'acquisition et ii) interface
par unité de communication. Sur certains capteurs elle peut embarquer un
système d'exploitation pour faire fonctionner le capteur. Elle peut
aussi être couplée à une unité de stockage, qui
servira par exemple à y enregistrer les informations transmises par
l'unité de capture.
L'unité de communication ("Transceiver unit")
est responsable de toutes les émissions et réceptions de
données via un support de communication radio. elle met en application
les procédures nécessaires pour convertir les bits à
transmettre dans des ondes radio fréquences pour qu'ils soient
récupérés correctement à l'autre
extrémité. De plus, le RCSF est relié en réseau
grace à cette unité.
L'unité d'énergie ("Power unit")
est responsable de gérer l'alimentation en énergie de
tous les composants du noeud capteur. Elle est généralement
intégrée au capteur et est irremplaçable. l'énergie
est la ressource la plus précieuse d'un capteur, car elle influe
directement sur sa durée de vie. .
Système de localisation de l'environnement
("Power unit") : les tâches de détection et les
techniques de routage ont besoin de connaitre souvent la localisation
géographique d'un noeud. Ainsi, un noeud peut être
équipé d'un système de localisation géographique.
Ce système peut se composer d'un module de GPS pour un noeud de haut
niveau ou bien d'un module de software qui implémente des algorithmes de
localisation qui fournissent les informations sur l'emplacement du noeud par
des calculs distribués.
Système de mobilité : la
mobilité est parfois nécessaire pour permettre à un noeud
de se déplacer pour accomplir ses tâches. Le support de
mobilité exige des ressources énergétiques étendues
qui devraient être fourni efficacement. Le système de
mobilité peut, également, opérer
6
CHAPITRE 1. GÉNÉRALITÉS SUR LES
RÉSEAUX DE CAPTEUR SANS FIL
dans l'interaction étroite avec l'unité de
détection et le processeur pour contrôler les mouvements du
noeud.
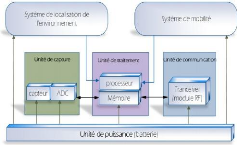
FIGURE 1.4: Architecture d'un capteur [2]
1.3 Caractéristiques et Contraintes des
RCSFs
Les réseaux de capteurs présentent des
caractéristiques intrinsèques au niveau des noeuds capteurs
(énergie, portée de transmission et puissance de stockage et de
traitement...) et au niveau du réseau formé par ces noeuds
capteurs (Bande passante, déploiement, type de réseau et
topologie dynamique).
1.3.1 Caractéristiques liées aux noeuds
capteurs
Les noeuds capteurs s'appuient sur certaines
caractéristiques pour transmettre les données du monde physique
sur lequel ils sont déployés :
L'énergie : Elle représente
une contrainte dans les réseaux de capteurs sans fil : Chaque noeud
capteur fonctionne avec une batterie, généralement, non
rechargeable avec une capacité limitée étant donné
sa petite taille. Dans la majorité des cas, ces noeuds capteurs sont
déployés dans des zones hostiles ou difficiles d'accès et
il est très peu probable qu'ils soient récupérables.
Aussi, vu leur nombre très grand (des milliers) on ne peut pas s'occuper
de chaque noeud capteur un à un.
La portée de transmission : Elle est
limitée par la capacité de rayonnement des antennes
utilisées et la puissance du signal mises en jeu. Par exemple, la
communication entre deux noeuds capteurs ne peut avoir lieu que si la distance
qui les sépare n'est pas trop importante (quelques dizaines de
mètres en pratique).
La puissance de stockage et de traitement :
Elle est relativement faible. Par exemple, les noeuds capteurs de type "mote"
sont composés d'un microcontrôleur 8 bits 4 MHz, 40 Ko de
mémoire et d'une radio de débit environ 10 kbps. Cela reste vrai
même pour les noeuds de moyenne gamme, comme les "UCLA/ROCKWELL'S WINS",
qui ont un processeur StrongARM
7
CHAPITRE 1. GÉNÉRALITÉS SUR LES
RÉSEAUX DE CAPTEUR SANS FIL
1100 avec une mémoire flash de 1 Mo, une
mémoire RAM de 128 Ko et une radio dont le débit est 100 Kbps
1.3.2 Caractéristiques liées au RCSF
Un RCSF possède plusieurs caractéristiques parmi
lesquelles [5] :
· les ressources limitées des capteurs en calcul, en
mémoire et en énergie;
· la durée de vie limitée et
l'auto-configuration des noeuds capteurs;
· le mode de communication direct ou en multi-sauts et la
densité importante des capteurs qui peuvent atteindre des dizaines de
millions pour certaines applications;
· la possibilité de découper le réseau
en clusters et d'utiliser les capteurs comme calculateurs ou des
agrégateurs;
· la coopération entre les noeuds capteurs pour les
taches complexes et l'absence d'un identifiant global pour les capteurs;
· deux modes de fonctionnement : « Un à
plusieurs » où la station de base diffuse des informations aux
différents capteurs; et « Plusieurs à un » où
les noeuds capteurs diffusent des informations à la station de base;
· les types de communication : unicast, broadcast,
multicast, local gossip, convergeCast.
1.3.3 Contraintes
les principaux facteurs qui influencent la conception d'un
RCSF sont : passage à l'échelle, la tolérance aux pannes,
les contraintes matérielles, les coûts de production, la topologie
du réseau, la consommation d'énergie te le média de
transmission [7].
Passage à l'échelle (Scalability)
: le bon fonctionnement d'un réseau est conditionné par
la définition d'un schéma de déploiement efficace
respectant la propriété de haute densité. Le passage
à l'échelle est défini comme la possibilité de
déployer un grand nombre de noeuds sur une petite surface. Il est
donné par la valeur calculant les distances entre les noeuds. Il est
utilisé pour connaitre exactement la densité, le rayon
d'émission et le nombre moyen de voisins d'un noeud donné.
Tolérance aux pannes : le
fonctionnement d'un ou de plusieurs capteurs peut être interrompu au
cours du cycle de vie du réseau. Les causes de ces défaillances
sont multiples : i) manque en ressources énergétiques, ii)
dégâts matériels, iii) interférences
environnementales, iv) compromission des noeuds . . . etc. Ces pannes ne
doivent pas affecter le fonctionnement global du réseau. La
tolérance aux pannes se définie alors comme la capacité du
réseau à continuer à fonctionner normalement sans
interruption même après le dysfonctionnement d'un ou de plusieurs
de ses noeuds capteurs.
Environnement de déploiement : dans
la majorité des applications, les noeuds capteurs sont
déployés dans des zones distantes, hostiles et sans aucune
surveillance ni intervention
8
CHAPITRE 1. GÉNÉRALITÉS SUR LES
RÉSEAUX DE CAPTEUR SANS FIL
humaine. Les capteurs doivent être conçus pour
résister aux différentes conditions climatiques telles que la
chaleur, l'humidité, le froid, la pression . . . etc.
Topologie du réseau : l'ajout de
nouveaux capteurs sur la zone de captage ou la défection d'un ou de
plusieurs noeuds capteurs du réseau peut causer une instabilité
de la topologie du réseau.
Contraintes matérielles : la
consommation stricte et mesurée de l'énergie, un coût
faible, le fonctionnement autonome des capteurs, l'adaptation aux conditions de
déploiement, une portée radio limité, un faible
débit... etc.
Economie d'énergie : la batterie est
considérée comme l'unique alimentation en ressources
énergétiques des capteurs. L'énergie d'un capteur est
consommée par toutes ses unités.
1.4 Architecture d'un RCSF
Un RCSF est un type particulier de réseaux Ad Hoc[5]
composé d'un grand nombre de noeuds qui sont généralement
des capteurs de petite taille capable d'agir de façon autonome. La
figure1.5 présente un exemple classique de réseau de capteurs
sans fil: les capteurs sont déployés de manière
aléatoire dans une zone à surveiller, et un puits ou/et
collecteur situé à l'extrémité de cette zone, est
chargé de récupérer les données collectées
par les capteurs. Lorsqu'un capteur détecte un événement
pertinent, un message d'alerte est envoyé au puits/collecteur par le
biais d'une communication multi-sauts. Selon [8] , il existe deux types
d'architecture pour les RCSFs :
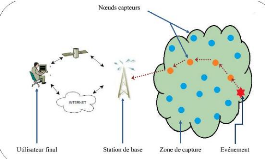
FIGURE 1.5: Exemple d'un réseau de
capteur sans fil [4] Les RCSF plats et les RCSF hiérarchiques.
Architecture de communication
Après le déploiement des noeuds capteurs sur
une certaine zone de captage, ceux-ci commencent par la découverte de
leurs voisins afin de construire la topologie de communication. Ainsi, ils
deviennent capables d'accomplir les tâches qui leur sont
affectées. Selon une communication multi-sauts, les capteurs sont
chargés de collecter des données, les router vers un
9
CHAPITRE 1. GÉNÉRALITÉS SUR LES
RÉSEAUX DE CAPTEUR SANS FIL
noeud particulier appelé noeud puits. Ce dernier
analyse ces données et transmet à son tour l'information
collectée à l'utilisateur via internet ou bien satellite.
Mécanisme d'accès au canal lors des
communications sans fil
les RCSF n'utilisent aucun câble physique pour
communiquer entre eux ou avec la station de base : toutes les transmissions
sont effectuées par voie hertzienne. Un défi important dans ce
type de réseau est la conservation d'énergie et la gestion des
collisions dues à un transfert de données simultané entre
deux noeuds sur le même support. Les protocoles de contrôle
d'accès au support (MAC)ont été développés
essentiellement pour essayer d'éviter ce genre de collisions en aidant
les noeuds à décider quand et comment ils peuvent accéder
au support. Le rôle de la couche MAC peut être simulé par
celui de la régulation de la circulation dans les grandes routes.
Plusieurs véhicules traversent la même route mais des
règles sont nécessaires pour éviter les accidents [9]. Il
existe iverses techniques d'accès au médium dans les RCSF : TDMA
[10], FDMA [11], CDMA et CSMA/CA. [12] [13]
Architecture protocolaire
Dans le but d'établir efficacement un RCSF, une
architecture en couches est adoptée afin d'améliorer la
robustesse du réseau. Une pile protocolaire de cinq couches
(application, transport, réseau, liaison de données et physique)
est donc utilisée par les noeuds du réseau. Cette pile
possède trois plans (niveaux) de gestion : le plan de gestion des
tâches qui permet de bien affecter les tâches aux noeuds capteurs,
le plan de gestion de mobilité qui permet de garder une image sur la
localisation des noeuds pendant la phase de routage, et le plan de gestion de
l'énergie qui permet de conserver le maximum d'énergie.
1.5 Les enjeux fondamentaux d'un RCSF
Les enjeux des réseaux de capteurs que nous
présentons ici sont fondamentaux pour les dits réseaux, il s'agit
de :
Le Routage
L'acheminement des données entre le noeud collecteur
et la station de base via un réseau de connexion est une tâche
difficile qui nécessite un travail de collaboration de l'ensemble des
noeuds capteurs participant à ce transfert. Pour un acheminement
optimal, les fonctions de routage doivent tenir compte des ressources
limitées des noeuds notamment de leur niveau d'énergie. On
distingue deux modes de transmission d'informations dans les RCSFs [7] :i)
Envoi direct (en un seul saut) : c'est-à-dire que le noeud
émetteur peut atteindre directement la BS. Cette transmission est
possible si la BS est directement accessible par le noeud émetteur; on
parle dans ce cas de Routage à topologie plate; ii)
Envoi en multi-sauts : dans le cas où la BS n'est pas
accessible par le noeud émetteur, on utilise la méthode d'envoi
par noeuds intermédiaires. Ceci permet de créer des routes entre
le noeud émetteur et sa destination. On parle dans ce cas
10
CHAPITRE 1. GÉNÉRALITÉS SUR LES
RÉSEAUX DE CAPTEUR SANS FIL
de Routage Hiérarchique. Suivant la
méthode de création et de maintenance des routes lors de
l'acheminement des paquets, les protocoles de routages des RCSF peuvent
être classés en 03 catégories [14] :
les protocoles de routages Proactifs : ici,
les routes sont calculées à l'avance. Chaque noeud met à
jour plusieurs tables de routage par échange de paquet de contrôle
entre voisins. Son inconvénient est la table de routage des informations
qui ne seront pas forcement utilisées ce qui est une perte en espace
pour les capteurs.
les protocoles de routages Réactifs :
ici, les routes ne sont calculées que sur demande. Si un noeud veut
transférer une information à un autre noeud, il doit tout d'abord
déterminer la route avant d'effectuer le transfert. Son
inconvénient est le temps mis pour déterminer la route des
paquets ce qui peut entrainer une dégradation des performances des
applications.
les protocoles de routages Hybrides : qui
combine les 2 premiers afin de profiter des avantages de chacun.
Le Protocole
Un protocole assure la liaison des équipements par la
définition de moyens physiques et procéduraux garantissant
l'interconnexion entre eux, en procédant à la définition
et le contrôle des flux d'informations échangées. Dans les
RCSFs, plusieurs protocoles sont déployés aux différents
niveaux de la couche protocolaire pour assurer la communication entre les
équipements du réseau et la sécurité des
informations échangées. On cite les protocoles TRAMA, S-MAC pour
la couche liaison de données, TEEN, APTEEN, LEACH pour la couche
réseau ou Pike, LEAP comme protocoles cryptographiques assurant la
sécurité des données.
La sécurité
Comme les capteurs sont souvent déployés dans
des zones publiques, ils doivent être capables de maintenir
privées les informations qu'ils recueillent. Par conséquent, la
sécurité des données dans les RCSFs devient encore plus
significative. Toute politique de sécurité doit prendre en
considération toutes les contraintes des capteurs.
Le clustering
La clusterisation est une technique qui consiste à
diviser le réseau en groupe de noeuds également appelés
clusters ou grappes. Chaque cluster est dirigé par un chef (Cluster
Head) désigné soit par élection par les noeuds de son
cluster, soit choisi et imposé par la station de base [15, 16].
L'objectif de cette technique est de présenter le meilleur moyen de
répartition et de conservation de la consommation d'énergie par
un traitement et une transmission contrôlée des données
récoltées. Nous détaillerons cette partie dans le chapitre
suivant.
1.6 Applications des Réseaux de capteurs Sans
Fil
Les RCSFs ont un champ d'application vaste et
diversifié (voir figure ??). Ceci est rendu possible par leur cout
faible, leur taille réduite, le support de communication sans fil
utilisé et la large gamme des types de capteurs disponibles. Parmi
elles, nous citons [5] :
11
CHAPITRE 1. GÉNÉRALITÉS SUR LES
RÉSEAUX DE CAPTEUR SANS FIL
Domaine militaire : les RCSFs sont le
résultat de la recherche militaire. Ils sont utilisés dans la
surveillance des champs de bataille pour connaitre exactement la position, le
nombre, l'armement (chimique, biologique, nucléaire...etc),
l'identité et le mouvement des soldats et ainsi empêcher leur
déploiement sur des zones à risques.
Domaine civil : Apparus dans plusieurs
contextes notamment dans la surveillance des habitations (concept de
bâtiments intelligents), des infrastructures, des installations et des
zones à risques. Leur utilisation permet de réduire
considérablement le budget consacré à la
sécurité des humains tout en garantissant des résultats
sûrs et fiables.
Domaine agricole et environnemental : Les
RCSFs sont très utiles dans la protection de l'environnement. Ils
peuvent être utilisés pour la détection des feux de forets,
des inondations, surveillance des volcans, le déplacement des animaux..
. etc. Dans le domaine agricole, on cite le déploiement des capteurs sur
un champ agricole afin d'identifier les zones sèches et permettre leur
irrigation à temps.
Domaine industriel : Le suivi des chaines de
production dans une usine, détection des dysfonctionnements de machines,
suivi du mouvement des marchandises dans les entrepôts de données,
suivi du courrier, des colis expédiés.. . etc. sont, entre
autres, des exemples concrets d'application des RcSF dans le domaine
industriel.
Domaine de la santé : Un moyen
très efficace pour le domaine médical et le suivi
temps-réel de l'état des patients, notamment ceux atteints de
maladies chroniques, ils permettent de collecter des informations
physiologiques de meilleure qualité [17][18] pouvant être
stockées pour une longue durée ou alors détecter des
comportements anormaux chez des personnes âgées ou
handicapées comme les chutes, les chocs, les cris. . . etc.
Applications domestiques : Les RCSFs sont
l'un des moyens les plus importants dans la lutte contre le
réchauffement climatique. En effet, l'intégration des capteurs
dans des murs ou sur les plafonds des maisons permet d'économiser un
maximum d'énergie en gérant au mieux l'éclairage et le
chauffage en fonction de la localisation des personnes. Également, les
capteurs peuvent être embarqués dans des appareils
électroménagers et d'interagir entre eux et avec un réseau
externe pour assurer un meilleur contrôle à distance de ces
appareils par leur propriétaire [19].
La liste des applications des RCSFs est non exhaustive. Ils
peuvent être utiles dans d'autres domaines comme la
sécurité alimentaire, les télécommunications, la
robotique ou dans des applications traditionnelles (automobile,
aéronautiques, applications commerciales. . . etc.).
1.7 Conclusion
Le but de ce chapitre était de présenter de
manière globale la notion de réseaux de capteurs sans fil. Pour y
parvenir nous avons commencé par présenter dans la
première section l'architecture d'un capteur, élément
principal d'un RCSF. Par la suite, nous avons présenté les
différentes caractéristiques des RCSFs ainsi que les contraintes
liées à la conception de ces derniers. Enfin,
12
CHAPITRE 1. GÉNÉRALITÉS SUR LES
RÉSEAUX DE CAPTEUR SANS FIL
nous avons présenté quelques domaines de leur
utilisation. A la lumière de ce qui précède, nous pouvons
dire que Les RCSFs possèdent des caractéristiques
particulières qui les différencient des autres types de
réseaux sans fil. Ces spécificités telles que la
consommation d'énergie réduite, la scalabilité ou le
routage incitent le besoin de concevoir de nouveaux protocoles d'accès
au support, de routage, de sécurité qui s'adapteront aux
caractéristiques des RCSFs. Après avoir passé en revue les
différentes notions qui gravitent autour des RCSfs, il devient
primordial de présenter les différents protocoles de routage
géographiques dans les RCSFs. Mais avant, nous allons dans le chapitre
suivant présenter les différents Protocoles de clustering qui
sont à la base de ces protocoles de routage.
13
Chapitre 2
Les Protocoles de Clustering dans les
Réseaux de Capteurs Sans Fil
Sommaire
2.1 Introduction 13
2.2 Principe du Clustering dans les RCSF 14
2.3 Partitionnement Centré sur le noeud
15
2.3.1 Algorithme de clustérisation de Basagni : DCA, DMAC
et GDMAC . 15
2.4 Partitionnement centré sur le Cluster
17
2.4.1 Partitionnement en Clique : Algorithme de Sun et al.
18
2.4.2 Partitionnement pour un contrôle hiérarchique
: Algorithme de Ba-
nerjee et al. 23
2.4.3 Architecture virtuelle d'un
réseau de capteurs : Algorithme de clus-
térisation de A. Wadaa et al. 25
2.4.4 partitionnement en 3D 27
2.5 Conclusion 35
2.1 Introduction
Les auteurs en [20, 21] définissent le clustering
comme une méthode utilisée pour partition-ner un réseau de
grande taille en un certain nombre de groupes virtuels ou logiques
appelés "clusters", plus homogènes selon une métrique
spécifique ou une combinaison de paramètres, pour former une
topologie virtuelle. Le clustering permet d'optimiser les fonctions et les
services du réseau tel que le routage, la maintenance, la
sécurité, etc. C'est une approche DPR qui est utilisée
dans de nombreux domaines pour résoudre des problèmes qui sont
globalement complexes. Si dans les groupes de noeuds formés, l'un des
noeuds est élu comme chef alors on parle de cluster ou de clique. Dans
le cas contraire, on parle de zone. Dans les différentes cliques
formées, le chef de clique est responsable des différentes
opérations qui se déroulent
14
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
dans la clique. Tous les protocoles de géocasting dans
les RCSFs à multiples sauts débutent par une phase de clustering
dans laquelle l'on transforme l RCSF à multiples sauts en plusieurs sous
réseaux accessibles sans sauts. Dans l'optique d'alléger la
présentation des différents protocoles de géocasting dans
un RCSF à multiples sauts, nous allons présenter dans ce chapitre
les différents algorithmes de partitionnement qu'ils utilisent.
2.2 Principe du Clustering dans les RCSF
La solution retenue le plus communément pour organiser
un très grand RCSF est de regrouper les noeuds en clusters comme le
montre la figure 2.1. Ce type d'organisation permet de réduire le nombre
de noeuds participant à des communications sur de longues distances. De
manière générale, le partitionnement d'un réseau
s'effectue sur le principe suivant [22] : les noeuds sont divisés en
clusters, et certains noeuds, nommés chef de cluster (ou clusterhead en
anglais) sont responsables tant de la formation que de la maintenance des
clusters. L'ensemble des clusterheads est appelé l'ensemble
dominant. C'est le backbone du réseau. Dans les solutions
existantes, le partitionnement est effectué en deux phases distinctes :
la phase d'initia-lisation des clusters et la phase de maintenance des
clusters. La première phase est accomplie en choisissant certains noeuds
pour qu'ils agissent comme l'ensemble dominant du processus de partitionnement.
Les clusters sont alors formés autour des clusterheads. Ceux qui ne sont
pas clusterheads sont qualifiés de noeud ordinaire. Les
algorithmes de partitionnement actuels diffèrent essentiellement sur
l'heuristique utilisée pour choisir qui peut prétendre au statut
de clusterhead.
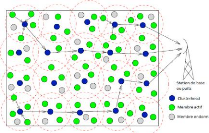
FIGURE 2.1: Exemple de topologie basée
sur des clusters
Il existe dans la littérature, 02 types de
partitionnement : Partitionnement centré sur le noeud
et le Partitionnement centré sur le
cluster.
15
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
2.3 Partitionnement Centré sur le noeud
Ici, les clusters sont formés autour des CH. Plusieurs
protocoles ont été proposés pour choisir le clusterhead
dans les RCSFs. Dans les algorithmes dits à " plus petit identifiant ",
chaque noeud se voit assigné un identifiant unique et le noeud avec le
plus petit identifiant est élu CH. Un noeud qui peut entendre un ou
plusieurs CHs est une " passerelle ", qui est
généralement utilisée pour le routage d'informations entre
les clusters. Sinon, il est un noeud ordinaire. Parmi les algorithmes de
partitionnement centré sur le noeud, nous pouvons citer : l'approche de
Gerla et Tsai [23], l'algorithme de clusterisation de Basagni (DCA, DMAC et
GDMAC), l'algorithme de partitionnement sans unicité de poids de Idrissa
Sow,... etc.
2.3.1 Algorithme de clustérisation de Basagni :
DCA, DMAC et GDMAC
Bassagni propose en [24] un algorithme de clustering pour les
RCSFs en considérant comme paramètre de clustérisation le
poids relatif de chaque noeud. Compte tenu de la mobilité
récurrente des noeuds, le paramètre du poids de chaque noeud est
introduit pour choisir les noeuds chefs de clusters. A la fin de la
procédure de clustérisation, les trois propriétés
suivantes doivent être satisfaites : chaque noeud ordinaire a au moins un
CH comme voisin; chaque noeud ordinaire est associé au CH de plus grand
poids et deux CHs ne peuvent pas être voisins. Cet algorithme de
clustérisation est divisé en deux sous étapes :
l'étape d'initialisation des clusters et l'étape de maintenance
des clusters. Les auteurs supposent également que durant
l'exécution de l'algorithme, la topologie du réseau ne change
pas; et qu'un message envoyé par un noeud est bien reçu
après un temps fini (un seuil) par tous ses voisins; tout noeud
connaît son poids, son identifiant et les identifiants et poids de tous
ses voisins.
L'algorithme est exécuté par chaque noeud
individuellement de telle façon qu'un noeud u décide de
son propre rôle (clusterhead ou noeud ordinaire) en fonction seulement de
la décision de ses voisins avec des poids plus forts que lui. Donc,
initialement, seuls ces noeuds avec le poids le plus élevé du
voisinage vont diffuser un message à leurs voisins directs,
établissant qu'ils sont les clusterheads. Si aucun noeud avec un poids
plus fort n'a envoyé de tel message, alors u va envoyer un
message établissant son statut de clusterhead.
Choix du Cluster-Head (CH)
Le choix du CH est fonction du degré sortant de chaque
noeud. Dans le cas où plusieurs noeuds ont le même degré on
met en exergue le poids de chaque noeud. La procédure de choix du CH est
la suivante : les noeuds de plus grand degré initient la
procédure en envoyant des requêtes d'être CH à tous
leurs voisins. De là, tout noeud dont le degré est
supérieur à celui de ses voisins diffuse sa décision
d'être chef de cluster. Si un noeud connait un de ses voisins de
degré supérieur au sien, il ne peut plus être chef de
cluster. Il adopte ce noeud là comme chef de cluster.
16
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
Choix des noeuds ordinaires
Cette étape est aussi basée sur la comparaison
des degrés des autres noeuds. En effet, pour un noeud vi dont
le degré est inférieur à celui de ses voisins, deux cas
possibles se présentent : Si ce noeud vi est voisin d'un noeud
CHi qui est chef de cluster, alors vi rejoint automatiquement
le cluster dont le chef est CHi. Si le voisin de vi de plus
haut degré appartient à un cluster, deux cas sont possibles : si
un chef de cluster CHi est parmi ses voisins, alors il devient membre
du cluster dont le chef est CHi ; sinon, il crée un nouveau
cluster.
L'algorithme utilise deux types de messages : ch(v)
utilisé par un noeud v pour mettre au courant ses voisins
qu'il sera clusterhead, et join(v, u), avec lequel v
communique à ses voisins qu'il va faire partie du cluster dont le
clusterhead est u. la description de cet algorithme est la
suivante:
Chaque noeud démarre l'exécution de
l'algorithme en même temps, en utilisant une même procédure
d'initialisation. Seuls les noeuds qui ont le poids le plus élevé
par rapport à tous leurs voisins directs vont envoyer un message du type
ch(noeuds avec les forts poids) pour dire qu'il veut être
clusterhead. Tous les autres noeuds se contentent d'attendre de recevoir un tel
message. A partir de là, on dispose de 2 procédures
spécifiques dont l'exécution est déclenchée par les
réceptions de message :
lors de la réception d'un message
ch venant d'un voisin u, le noeud
v vérifie d'abord s'il a déjà reçu de tous
ses voisins z , tels que w, > wu un message
join(z, x) de type ch avec x un noeud quelconque du
réseau. Dans le cas négatif, et si u est le noeud de
plus fort poids dans le voisinage de v ayant envoyé un message
ch, alors v rejoint u, et quitte l'exécution
de l'algorithme;
lors de la Réception d'un message
JOIN(u, t) : Le noeud v vérifie s'il a
précédemment envoyé un message ch. Si c'est bien
le cas, v vérifie si le noeud u veut rejoindre son
propre cluster et actualise, si besoin, son ensemble cluster(v).
Lorsque tous les voisins z de v tel que w, <
wu ont déjà témoigné leur
volonté à rejoindre son cluster, v quitte
l'exécution de l'algorithme. Un noeud v qui a dans sa liste de
voisins des noeuds de poids supérieurs au sien et qui n'a pas
reçu des messages de type CH(u) attend de recevoir de tous ces
voisins x de poids supérieur au sien des message de type
JOIN(x, t), pour dire en fait que ses voisins ont rejoint un ou
plusieurs CH de poids supérieur aux leurs. Dans ce cas le noeud v
décide alors de devenir CH en diffusant alors le message CH(v).
Illustrons le fonctionnement de l'algorithme DCA de Basagni avec le graphe
représenté par la figure 2.2
Cet algorithme convient pour des réseaux "
quasi-statiques ". En ce qui concerne la maintenance, l'auteur propose d'abord
une succession de clusterisations afin que DCA s'adapte à la
mobilité des noeuds. Par la suite, il propose une autre version du DCA
qu'il baptise DMAC plus adapté pour les réseaux où les
capteurs sont mobiles. La métrique de sélection des CHs est cette
fois ciliée à la mobilité des capteurs. DMAC géra
tant l'initialisation que la maintenance de l'organisation des clusters
malgré la mobilité des noeuds. La maintenance quant à elle
se fait
17
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
à présent par actions réduites [24].
désormais on n'a plus besoin de supposer que la topologie du
réseau est statique durant la construction des clusters. L'adaptation
aux changements de la topologie du réseau est rendue possible en
laissant chaque noeud réagir non seulement à la réception
d'un message venant d'autres noeuds, mais également à la
défaillance d'un lien de communication vers un autre noeud
Afin d'économiser en énergie et limiter
l'impact de la mobilité, l'auteur introduit l'algorithme GDMAC. Son
propos est le suivant : conformément aux spécifications de
l'algorithme DMAC, un noeud ordinaire va toujours se soumettre avec le
clusterhead de son voisinage qui a le plus fort poids. Si plus tard, un autre
clusterhead avec un poids plus élevé apparaît dans son
voisinage, le noeud ordinaire va changer son affiliation afin de se soumettre
toujours au noeud, a priori, le plus capable d'être un bon clusterhead.
Une autre forme de réaffiliation apparaît quand deux CHs, à
cause de leur mobilité, se retrouvent dans la portée d'influence
l'un de l'autre. A ce moment-là, seul le plus lourd des deux va
conserver son statut de clusterhead, tandis que l'autre va devenir noeud
ordinaire et se chercher un clusterhead convenable. Si aucun n'est à
portée de transmission, le noeud va redevenir son propre clusterhead
(élection).
Nous pouvons remarquer que ce schéma de clustering
présente plusieurs points faibles. En effet, l'algorithme de Basagni ne
prend pas en compte la sécurité du processus de formation de
clusters. Outre, à la fin de cet algorithme, un noeud quelconque peut
appartenir à plusieurs clusters. De plus, la constitution des noeuds est
dépendante d'un noeud précis (le clusterhead)et on peut avoir
à la fin, des clusters non disjoints. Ceci nous amènent à
des interrogations telles que : Que se passerait-il si ce clusterhead avait
menti sur ces métriques ou était en effet un noeud malicieux? le
protocole suivant vient pallier à ces insuffisances.
2.4 Partitionnement centré sur le Cluster
A l'opposé des solutions de partitionnement dites
centrées sur les noeuds qui permettent la construction de clusters d'au
plus deux sauts, il existe les solutions dites centrées sur les
clusters

FIGURE 2.2: Exemple de Partitionnement du
réseau par l'algorithme DCA
18
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
qui permettent la construction de clusters à k sauts.
Un k-cluster est constitué d'un groupe de noeuds qui sont
mutuellement accessibles par un chemin d'une longueur k ~ 1. Dans
cette approche, le réseau est décomposé en clusters de
noeuds sans qu'un noeud particulier ne soit désigné comme CH.
Dans ce qui suit nous présenterons 03 protocoles qui ont
été développés en [25], [26] et [27].
2.4.1 Partitionnement en Clique : Algorithme de Sun et
al.
Nous présentons ici un protocole de partitionnement du
réseau utilisant l'approche CF (Cluster First ) [25]. Il s'agit d'une
approche qui consiste à former les clusters avant l'élection des
CHs. Cette approche requiert le fait que chaque noeud accepte l'appartenance
à un groupe avant l'élection du leader. C'est ainsi que le
réseau est partitionné en clique où la communication
directe est possible entre les noeuds appartenant à une même
clique. Le protocole développé en [25] a les
propriétés suivantes :
· Le protocole est essentiellement distribué et
chaque noeud calcule sa clique d'appartenance en envoyant des messages à
ses voisins directs.
· L'algorithme de partitionnement se termine. Les noeuds
qui y participent et qui ne suivent pas les spécifications du protocole
sont systématiquement identifiés et enlevés de toutes les
cliques.
· A la fin du partitionnement, le réseau est
constitué en cliques deux à deux disjointes et chaque noeud a une
vue nette des noeuds membres de sa clique d'appartenance.
Vocabulaire
Le protocole mis sur pied a pour objectif de partitionner un
RCSF en des cliques deux à deux disjointes tel que les noeuds d'une
même clique puissent communiquer directement entre eux. Chaque noeud doit
individuellement déterminer sa clique d'appartenance en se servant des
informations échangées avec ses voisins directs. Ce protocole
obéit au vocabulaire suivant : on désigne par Ci la
clique à laquelle le noeud i appartient. Un noeud est dit
normal s'il suit tout le processus de formation des cliques, sinon il est dit
malicieux. Les noeuds normaux doivent avoir des cliques consistantes telle que
définie par la conformité de clique.
Il y'a conformité de clique pour un noeud normal i
si quelque soit le noeud j E Ci, Cj =
Ci, autrement dit, s'il existe un noeud j E Ci tel
que Cj E/ Ci, on dira qu'il y'a inconsistance de clique. On
suppose que chaque noeud a un unique ID, qu'il peut être
identifié de manière unique et qu'il connait tous ses voisins qui
sont dans sa zone de communication avec les autres[28]. Ce protocole se
déroule en quatre étapes s'il n'y a pas une inconsistance de
clique et en cinq étapes sinon. Les différentes étapes du
protocole de Sun et al. sont les suivantes :
19
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
Étape 1 : calcul du LMC :
Notons par LZ la liste des voisins du noeud
i. Ici, il est question de déterminer le plus grand groupe
(encore appelé LMC) auquel peut appartenir un noeud. Cette étape
se divise en 2 sous-étapes : chaque noeud i commence d'abord
par envoyer la liste LZ de ses voisins à tous ceux-ci et
dès réception, chaque noeud i construit et met à
jour la matrice MZ qui représente l'état de la
connectivité entre deux noeuds quelconque du groupe de noeuds. cette
matrice est construite comme suit :
|
M(i, j)=
|
{
|
1 si j ? LZ 0 si j ?/ LZ
|
Si un noeud i ne reçoit pas la liste de
voisins Li du noeud j, le noeud i considère
que le noeud j a été corrompu et le retire de sa liste
de voisins LZ. Après cette étape, les différentes
matrices sont ensuite symétrisées c'est-à-dire que l'on ne
considère que les liens bidirectionnels entre deux noeuds quelconques du
graphe induit. Avec cette matrice des voisins, chaque noeud calcule le LMC
auquel il appartient. En se basant sur la matrice des voisins de i, on
peut construire le graphe GZ = (VZ, EZ) où VZ
est constitué des noeuds i et de ses voisins et EZ
est l'ensemble des liens bidirectionnels entre les noeuds de VZ.
Le calcul du LMC est fait en utilisant l'algorithme suivant :
Algorithme 2.4.1: calcul du LMC
Entrees : Le graphe GZ = {VZ,
EZ}, i ? VZ Sorties: : Le groupe LMC
YCZ
Etapes :
1 SZ = {j|(i,j) ?
EZ};CZ = {i};
2 Tantque SZ =6 Ø
Faire
|
3
|
Chercher k ? SZ avec le plus grand |LZ
n Lk|
|
|
4
|
LZ ? LZ n Lk
|
|
5
|
CZ ? CZ ? {k}
|
|
6
|
SZ ? SZ - {k} -
{j|(j,k) ?/ EZ,j ? SZ}
|
7 Fintantque
La figure 2.3, présente un RCSF non partitionné
constitué de 8 sommet à clustériser par l'algorithme de
sun et al. Illustrons la construction des LMC pour le noeud 1 de la figure2.3.
Notons par CkZ le LMC issu du noeud i à
la k - ième étape. Pour le noeud 1,
L1 = 0, 2, 3, 4, 7 et sa matrice
de voisinage est donnée par :
20
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
|
1
?
? ? ? 1
? ? ? 1
? ? ? 0
? ? ? 0
0
?
|
1 1 1 1 1 1
|
1 1 1 1 0 0
|
1
|
=>
1
1
1
1
0
|
0
|
0 1 0 1 1 0
|
0
?
1
0
0
0
? ? ? ? ? ? ? ? ? ? ? ? ?
0
|
On remarque que le lien 0 => 3 n'est pas
bidirectionnel donc il ne sera pas considéré comme étant
un lien. Les listes des voisins des autres noeuds sont données par :
L0 = 1, 2 , L2 = 0, 1, 3,
L3 = 1, 2, 4, 5, 6, L4 =
1,3,5,6, L5 = 3,4,6,
L6 = 3,4,5, L7 = 1. Initialement, pour le
noeud 1, C1 = 1, L1 = 0, 2, 3,
4,7 et S1 = 0, 2, 3, 4,
7. A la première étape, on cherche k. L0L1
= 2, L2L1 = 0,3 , L3L1 =
2,4, L4L1 = 3, L7L1
=6= 0. Nous trouvons ainsi deux valeurs
maximales de k : 2 et 3. On préfère k=2 car c'est le noeud de
plus petit identifiant. Ainsi, on ajoute 2 à C1 et on retire 2
de S1. C'est à dire C1 = 1, 2 et S1
= 0, 3,4,7 . Comme les noeuds 4 et 7 ne sont pas
directement accessibles depuis le noeud 2, on les retire de S1 et
S1 = 0, 3. Au deuxième passage, les noeuds 0 et 3 ont
le même nombre de voisins commun avec les noeuds 1 et 2 (membres de
C1 ). Le noeud 1 choisit le noeud O car il a le plus petit
identifiant. Ainsi, on ajoute le noeud 0 dans C1 et C1 1 =
0, 1,2. On retire les noeuds 0 et 3 de S1 et
S1 = . Notons que le noeud 3 est enlevé de S1
uniquement parce qu'il n'est pas directement accessible depuis le noeud 0 comme
dit plus haut. L'algorithme prend fin car l'ensemble S1
=6= 0. La sortie est C1 = 0,
1, 2. De la même manière, on obtient C0 1 =
C1 2 = 0, 1,2 , C1 3 = C1 4 =
C1 6 = 3,4,5,6 et C1 7 =
1,7.
Étape 2 : mise à jour du LMC
Comme le calcul du LMC se fait sur la base d'une heuristique
portée sur les voisins, il est possible que les LMC calculés
à l'étape 1 par les noeuds voisins diffèrent. Il est donc
question de trouver une politique qui permettra de mettre tous les noeuds
d'accord sur la composition du groupe de noeuds dans lequel ils se trouvent.
Chaque noeud j envoie C1 i à tous ses
voisins. Pour question de sécurité, chaque message est
authentifié par ,iTESLA1 Comme le noeud j
calcule C1 i par une heuristique basée sur les
informations de ses voisins, il est possible que j
1. Le protocole /1TESLA est une
variante du protocole TESLA qui est utilisé
pour l'authentification des messages émis par diffusion.

FIGURE 2.3: Un graphe à 8 sommets à
clustériser par l'algorithme de Sun et al.
21
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
reçoive plus de LMC C1 j d'un voisin
j qu'il ne contienne. D'où, après réception des
LMC de ses voisins, le noeud i vérifie s'il existe une clique
C1 j meilleure que C1 i . Pour y
remédier, Sun et al. ont défini une relation d'ordre sur les
groupes formés par chaque noeud i. Ainsi, pour deux
i i
groupes de clusters Ci et Cj la relation
d'ordre ? définit par : Cj ? Ck si et seulement si
:
1. i ? Cj,i ? Ck et
2. (a) |Cj| < |Ck|, ou
(b) |Cj| = |Ck|, mais cj < ck,
où cj = min{ai|ai ? Cj ?
ai ?/ Ck} et ck = min{bi|bi
? Ck ? bi ?/ Cj} ou
(c) cj = ck mais j < k i
Cette relation d'ordre ? sur les groupes maximaux locaux
construits par chaque noeud i du graphe est une relation d'ordre
total2. Ils peuvent ainsi comparer les LMC reçus par chaque
noeud. L'illustration de cette étape sur l'exemple de la figure 2.3 est
la suivante : Après réception des LMC de ses voisins, le noeuds 1
a C1 0 = C1 1 = C1 2 = {0,1,2},
C1 3 = C1 4 = {3,4,5,6} et
C1 7 = {1, 7}, et dès lors, il supprime directement
C1 3 = C1 4 car il n'apparait pas dans cette
i
dernière. D'une part, comme |C1
7| < |C1 0|, on a
C1 ? C1 0. D'autre part,
C1 0 = C1 1 = C1 2 mais les
7
1 1
ID des noeuds sont rangés comme suit 0 <
1 < 2, on alors C1 ? C1
? C1 2. D'où le noeud 1
0 1
1 1 1
ordonne les cliques des noeuds 0, 1, 2 et 7 comme suit :
C1 ? C1 ? C1 ?
C1 2 et met à jour sa
7 0 1
clique en faisant C21 =
C1 2 = {0, 1, 2}.
La figure2.4 illustre le graphe de la figure 2.3
clustérisé à la fin de la deuxième étape du
protocole.
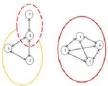
FIGURE 2.4: Le graphe clustérisé
à la fin de l'étape 2 de l'algorithme de Sun et al.
Etape 3 : détermination de la clique
finale
A la fin de l'étape 2, il se pose encore un
problème car les différents LMC ne sont pas disjoints (par
exemple, C21 et C2 7 contiennent tous
deux le noeud 1). Pour déterminer le groupe de noeuds final, chaque
noeud diffuse son LMC construit à tous ses voisins toujours en
application du protocole sécurisé de diffusion ,iTESLA.
Pour chaque noeud j membre de C2 i , le noeud i
vérifie s'il est inclut dans le LMC de j C2 j .
Si tel n'est pas le cas, le noeud i retire le noeud j de C2 i
. Si le noeud i ne reçoit pas C2 j mis à
jour du noeud j, le noeud i conserve le noeud j dans son LMC. Avec le
même exemple, parce que C21 ne contient
pas le noeud 7, le noeud 7 retire le noeud 1 de C21
et
2. une relation d'ordre est dite totale si elle est
réflexive, transitive et antisymétrique
22
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
obtient C3 7 = 7. A la fin, on obtient C3 0
= C3 1 = C3 2 = 0,1,2 , C3 3 =
C3 4 = C3 5 = C3 6 =
3,4,5,6 et C3 7 = 7. La figure2.5 illustre
les différents clusters formés par l'algorithme de Sun et al. en
utilisant comme graphe de départ celui de la figure2.3
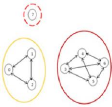
FIGURE 2.5: Le graphe final
clustérisé en utilisant l'algorithme de Sun et al.
Étape 4 : vérification de la
conformité des cliques
Chaque noeud i calcule également un code de
sécurité en se basant sur les messages reçus lors des
quatre premières étapes, le signe et l'ajoute dans le message
contenant la clique finale. Quand un noeud normal reçoit la
première copie de la clique finaleC3 j de
son voisin j ou envoyé par un autre voisin, si j E
C3 i , alors j ré-envoie la clique
C3 j . Le but de ce ré-envoie est de prévenir
les attaques silencieuses. Chaque noeud i vérifie la
conformité de la clique, c'est-à-dire le noeud i
vérifie que pour tout j E C3 i ,
C3 j = C3 i . Si une inconsistance de
clique est détectée, le noeud i entre à
l'étape 5, sinon il termine le processus de formation des cliques.
Étape 5 : identification des noeuds
malicieux
Cette étape s'effectue en deux phases : la
vérification de la conformité des cliques et la suppression des
noeuds malicieux. La première phase à savoir la
vérification de la conformité a pour objectif d'identifier les
noeuds malicieux qui ont envoyé les messages inconsistants dans les
précédentes étapes. Quand les noeuds malicieux sont
détectés par le noeud i, ce dernier envoie une alerte
aux autres noeuds en utilisant la signature du noeud malicieux comme preuve.
Après avoir enlevé les noeuds malicieux du réseau, le
protocole est relancé. Le déroulement de ce stage est le suivant
: si un noeud i détecte une inconsistance de clique avec le
noeud j, le noeud i demande au noeud j de lui
envoyer tous les messages qu'il a reçu aux 4 premières
étapes. Comme le noeud j a reçu la clique
authentifiée finale C3 i à l'étape 4,
seulement si C3 i =6 C3 j , le noeud j
fournit tous ses précédents messages reçus de
i. Le noeud j a besoin de signer ces messages pour prouver
qu'ils ont été envoyés par lui. Après
identification des noeuds malicieux, le noeud i entre à la
deuxième phase.
La deuxième phase est la suivante : quand une attaque
silencieuse3 est lancée par un noeud malicieux, un noeud
normal ne peut pas avoir de preuve pour convaincre les autres noeuds
3. Il y'a attaque silencieuse par un noeud malicieux lorsque ce
dernier envoie les messages à certains de ses voisins et pas à
d'autres
23
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
normaux qui ont reçu les messages du noeud malicieux.
De plus, le noeud normal ne peut pas distinguer le noeud normal qui a
réellement détecté un noeud malicieux du noeud malicieux
qui cherche à lancer une fausse alerte sur un noeud normal.
Une limite de l'algorithme de Sun et al.
présenté ci dessus est le fait qu'il ne permet pas de former une
hiérarchie de clusters. Pour pallier à cette insuffisance,
Banerjee et al. montrent comment on peut réaliser un clustering
hiérarchique dans un réseau.
2.4.2 Partitionnement pour un contrôle
hiérarchique : Algorithme de Banerjee et al.
Dans cette section, nous présentons l'algorithme de
Banerjee et al.[27] qui permet de construire des clusters hiérarchiques.
A la fin de l'algorithme, les différents clusters formés doivent
respecter les conditions suivantes :
1. les noeuds compris dans chaque cluster doivent tous
être connectés;
2. chaque cluster a une taille minimale et une taille
maximale;
3. un noeud à chaque niveau de la hiérarchie
appartient à un nombre constant de clusters de ce niveau;
Le problème à résoudre peut être
redéfinit en comment former des composantes connectées
V1, V2, ..., Vn du graphe G = (V, E)
étant donné un entier positif k tel que 1 k
= |V |
respectant les conditions suivantes :
1. uli=1 Vi = V . Chaque noeud
appartient à au moins un cluster.
2. G[Vi], le sous graphe de G induit par chaque
Vi est connecté.
3. La taille des clusters est bornée par :
(a) Vi, |Vi| < 2k.
(b) Vi, il existe un unique k tel que k
= |Vi|, il ne peut avoir qu'un seul cluster de taille
inférieure à k.
4. Vi n Vj 'O(1) : deux clusters doivent
avoir au plus un nombre constant de noeuds en commun.
5. 8(v)|O(1), où
8(v) = {Vi|v E Vi} : un noeud appartient
à un nombre constant de cluster.
La solution centralisée
Banerjee et al. en [27] proposent deux solutions selon que
l'on soit en architecture centralisée ou en architecture
distribuée. Lorsque l'environnement est centralisé, l'algorithme
commence par déterminer un arbre couvrant enraciné du graphe
initial. Les auteurs choisissent d'utiliser le BFS [29]. Les auteurs appliquent
au graphe de départ le parcours BFS et obtiennent un arbre
enraciné dont la racine est le noeud choisit pour lancer le parcours.
Soient T cet arbre,
24
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
T(u) le sous arbre enraciné en u et
C(u) l'ensemble des fils de u. En supposant que
V ~ 2k, il existe toujours un noeud u tel que
T(u) ~ k et que pour chaque fils v de
u, T(v) < k. Supposons que
C(u) = v1, v2, ..., vl. La création des
clusters peut se faire en partitionnant l'ensemble T(v1),
T(v2), ..., T(v,) des sous-arbres de u
enracinés en v1, v2, ..., v, respectivement. Par construction,
les différentes partitions sont disjointes et chacune d'elle est
constituée d'un ensemble de sous arbre tel que le nombre de noeuds la
composant soit compris entre k - 1 et 2(k - 1). Le processus
de création de chaque partition est simple. On y ajoute de façon
séquentielle des sous arbres jusqu'à ce que la taille de la
partition soit comprise entre k - 1 et 2(k - 1). Notons que
l'ajout d'un sous arbre ne peut pas faire exploser la taille de la partition
car un sous arbre a une taille maximale de k - 1. Une seule partition
et notamment la dernière partition à être
créée peut avoir une taille inférieure à k
- 1 (condition 3a). Le noeud racine u de départ est
maintenant ajouté à chaque partition crée afin de garantir
la connectivité de chaque partition et de respecter la condition (2).
Tous les noeuds compris dans des partitions ou clusters sont supprimés
de l'arbre. Le noeud u n'est pas détruit de l'arbre si le
dernier cluster ne satisfait pas la condition sur sa borne. Il sera alors peut
être utilisé pour former le cluster de niveau supérieur.
Ces différentes étapes sont répétées pour
créer tous les clusters. Supposons que l'algorithme de parcours en
largeur ait été appliqué à un graphe et que la
figure 2.6 est la résultante de ce parcours. On suppose que les fils
x, y, p , q, v ,z, r
et s du noeud racine u sont

FIGURE 2.6: Formation de clusters par
l'algorithme de Banerjee et al.
des sous arbres de tailles respectives 0.8k,
0.6k,
0.8k,0.7k,1.3k,
0.7k,0.6k et 0.5k. Au
passage de l'algorithme, on construit cinq clusters B, C,
D, F et A. En traitant le noeud racine x,
la taille de son sous arbre est 0.8k inférieure
à k. On traite ensuite le sommet y et il forme avec x un cluster car
leur taille est supérieure à k. On traite ensuite les sommets p
et q. On forme un nouveau cluster de taille 1.5k. Le sous
arbre enraciné en v est de taille supérieure à k. Donc il
forme un cluster. Les sommets r et s sont traités comme x et y. Ils
forment un nouveau cluster. Le sous arbre enraciné en z est de taille
inférieure à k. Il formera peut être un cluster avec la
racine de l'arbre ou alors il sera le seul cluster de taille inférieure
à k.
La solution distribuée
Il est question de montrer ici comment l'algorithme de
clustérisation de Banerjee et al. s'applique dans un environnement
distribué. Ici, chaque noeud du réseau lance le protocole
25
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
de formation de clusters. Celui-ci est constitué de
deux phases : la création de cluster et la maintenance de cluster
La création des clusters
Ce protocole possède deux étapes importantes
à savoir la découverte de l'arbre et la formation de
clusters. Ici, nous avons une version distribuée de l'algorithme de
création de clusters. Chaque noeud est capable de lancer le protocole de
formation de clusters. Mais les auteurs choisissent la racine de l'arbre BFS du
graphe. Si plusieurs noeuds lancent en même temps le
procédé, on devra alors utiliser un algorithme d'élection
par exemple pour les départager.
La maintenance de clusters
Cette phase du protocole est consacrée aux
opérations internes aux clusters dans deux cas : d'abord lorsqu'un
nouveau noeud rejoint un cluster et ensuite lorsqu'un noeud quitte le cluster.
Ici on modifie la condition sur la taille des clusters et maintenant la borne
supérieure est de 3k. On peut ainsi réunir le cluster de taille
inférieure à k et un cluster de taille inférieure à
2k.
Un noeud rejoint le cluster : Un noeud
capteur v fils du noeud u en rejoignant un cluster établit la liste de
ses voisins N(v). Si un noeud w, élément de
N(v) appartient à un cluster de taille strictement
inférieure à 3k - 1 alors on ajoute le noeud v à
ce cluster. Il peut arriver que l'on se trouve dans la situation où
chaque voisin w de N(v) appartient à un cluster de taille 3k -
1. Dans ce cas, on ajoute le noeud v à un tel cluster ramenant ainsi sa
taille à 3k. Il est ensuite partitionné en deux clusters de
taille supérieure à k pour satisfaire les conditions de taille de
chaque cluster. Notons ici que le noeud v peut appartenir aux clusters
partitionnés.
Un noeud quitte le cluster : Lorsqu'un noeud
quitte le ou les clusters dans lesquels il se trouve, il risque de rendre ces
clusters déconnectés. On peut prouver que le nombre de
composantes restantes dans le cluster est borné. La taille de chacune de
telles composantes est examinée et si elle est supérieure ou
égale à k, cette composante forme à elle seule un cluster.
Sinon, cette partition cesse d'être un cluster et ses noeuds membres
rejoindront un cluster voisin. Le mécanisme est pareil à celui du
paragraphe plus haut.
2.4.3 Architecture virtuelle d'un réseau de capteurs
: Algorithme de clustérisation de A. Wadaa et al.
Le protocole présenté ici est celui de la
construction d'une architecture virtuelle des RCSFs [26]. Il permet le
partitionnement d'un RCSF en secteurs et en couronnes de telle sorte
qu'après le partitionnement, chaque capteur ne se retrouve que dans un
seul secteur et une couronne bien précise. Le problème est
qu'initialement, un noeud ou un ensemble de noeuds ne sont pas directement
détectable dans l'espace par la BS, et aucune structure n'était
clairement définie. La solution proposée consiste donc à
la partition du réseau en différentes zone par la BS. Cette
dernière a la possibilité de diffuser des informations avec une
échelle plus ou moins grande, celle-ci étant utilisée pour
créer des couronnes; aussi, elle a la possibilité de diffuser des
informations
26
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
dans certaines directions, afin de créer divers
secteurs angulaires. La zone (i, j) est l'intersection d'un secteur
angulaire j et d'une Couronne i. Les capteurs d'une
même zone sont donc dans le même emplacement géographique et
forme un cluster. Ceci est illustré par la figure 2.7. Pour la suite, le
temps est divisé en slot s1, s2, ...,
sd_1 et on va considérer que
chaque capteur
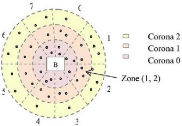
FIGURE 2.7: Architecture Virtuelle
synchronise son temps avec le sink à interval de temps
régulier. D'autre part, on considère que si le sink émet
un signal et qu'un capteur le reçoit, celui-ci met son bit b1
à 0 et celui qui ne le reçoit pas met le sien à 1.
Partitionnement en couronne
Le partitionnement en couronne permettra à tout capteur
du réseau d'enregistrer l'identité de la couronne dans laquelle
il se trouve. les auteurs supposent que tous les capteurs connaissent le nombre
k de couronnes que l'on souhaite former. Pour cela, chaque capteur
doit déterminer une chaine de log2 k bits afin de
déterminer le numéro de la couronne de rayon ri
avec 1 < i < k à laquelle il appartient. Le
protocole de partitionnement en couronne se déroule comme suit :
Au premier slot, tous les capteurs sont éveillés
et le sink émet une transmission de rayon rk/2
et donc tous les capteurs situés dans les k/2 premières
couronnes mettent leur bit b1 à 0 tandis que les autres mettent
les leurs à 1. Après d - 1 slots, les capteurs auront
appris tous les bits nécessaires au calcul de leur numéro de
secteur. En effet, après avoir appris les bits b1,
b2, . .. , blogk, un
capteur effectue la somme
log k
l = 1 + X bj2log
k_j (2.1)
j=1
qui est le numéro de sa couronne [26].
Partitionnement en secteur
Tout comme précédemment, le partitionnement en
secteur permettra à tout capteur du réseau d'enregistrer
l'identité du secteur angulaire dans lequel il se trouve. On suppose
dans un premier temps que les capteurs connaissent le nombre d de
secteurs que le réseau doit contenir.
27
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
Ensuite, que tous les secteurs obtenus après le
partitionnement doivent couvrir les secteurs 360°
angulaires d'angles d et en fin que le
sink est capable d'effectuer une diffusion angulaire suivant un angle
donné. Ainsi seuls les capteurs situés dans la zone de couverture
recevront le signal. Chaque capteur doit apprendre une chaine de logd
bits afin de déterminer le numéro du secteur dans lequel il
se trouve.
Déroulement :
Au premier slot, tous les capteurs sont éveillés
et le sink émet un signal couvrant rd/2 premiers
secteurs angulaires. Tous les capteurs qui recevront le signal mettront leur
bit b1 à 0 tandis
360°
que les autres mettront les leurs à 1. Posons
á = d et considérons les résultats
obtenus aux lemme 1 et 2.
Corollaire 1. après avoir appris les
bits b1, b2, . .. , bi-1, un
capteur doit se réveiller au temps slot z = 1 + i-1
j=1 cj pour apprendre le bit bi.
d'autre part, au temps z, le sink effectue une transmission correspondant au
secteur angulaire d'angle z * á
conclusion : après d-1 slots, les
capteurs auront appris tous les bits nécessaires au calcul de leur
numéro de secteur. en effet, après avoir appris les bits
b1, b2, .. . , blogd, un
capteur effectue la somme l = 1 + log d
j=1 bj2log d-j qui
est le numéro de sa couronne.
2.4.4 partitionnement en 3D
le protocole [26] présenté ci-dessus permettant
d'avoir une architecture virtuelle, ne s'applique que dans le cas où les
capteurs sont déployés dans le plan. Or la réalité
voudrait que ce protocole puisse prendre en compte un réseau où
les capteurs sont déployés dans un espace sujets à des
irrégularités, ou simplement quand les capteurs sont
déployés dans un espace. le protocole présenté ici
est celui de [22]. Il se base de celui réalisé en [26] pour
établir un protocole de partitionner pour un RCSF déployé
dans l'espace (en dimension 3).
Système de coordonnées
dynamiques
Pour des raisons de simplicité nous appellerons
couronne de rayon ri, 1 < i < l, l'espace
délimité par les sphères de rayon ri-1
et ri. Notre système de coordonnées est
centré sur le noeud sink. On suppose que ce dernier peut effectuer l
puissances transmissions omnidirectionnelles, m transmissions
directionnelles4 horizontales et n transmissions
directionnelles verticales. Les l puissances d'émission
omnidirectionnelles déterminent l sphères de rayon
r1 < r2 < r3 < rl. Les m
transmissions directionnelles horizontales définissent les sections
horizontales et les n transmissions directionnelles verticales quant
à elles définissent les sections verticales. Cette
stratégie d'émission permet de définir une structure
composée de l x m x n grappes ou clusters de coordonnées
(i, j, k). Les capteurs d'une grappe ont les mêmes
coordonnées géographiques.
4. Une transmission directionnelle est une transmission qui est
émise dans une directions précise suivant un angle donné,
recouvrant ainsi une portion de l'espace de déploiement semblable
à une tranche d'orange.
28
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
La figure 2.8 illustre l'architecture virtuelle de notre
réseau de capteurs, on y montre un exemple de section verticale ainsi
qu'un cluster appartenant à la couronne la plus externe (couronne 4).
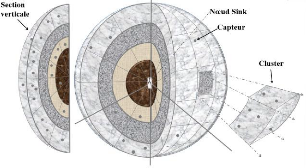
FIGURE 2.8: Système de
coordonnées dynamiques
Formation des couronnes
L'entier l est connu de tous les capteurs. Ainsi,
chaque noeud doit lire une chaîne de log2(l) bits,
déterminant l'identité de sa couronne, comme le montre la figure
2.9. On suppose que le temps est divisé en slots s1,
s2, s3, ..., sl_1 et que les
horloges des capteurs sont synchronisées avec celle du noeud sink. La
réception d'un signal émis par le noeud sink est codée par
0 et la non-réception du signal après un délai r
est codée par la valeur 1. Les capteurs connaissent le
numéro du slot en cours. Au premier slot, tous les capteurs sont
éveillés et enregistrent le bit de poids fort du numéro de
la couronne dans laquelle ils se trouvent. Les capteurs qui enregistrent la
valeur 0 au slot i resteront éveillés au slot i+1. Quant
aux capteurs qui enregistrent la valeur 1 au slot i, ils s'endormiront
jusqu'au slot k (la valeur de k est déterminée
dans la section 2.4.4). Dès qu'un capteur a enregistré ses
log2(l) bits, il s'endort jusqu'au slot l - 1.
L'algorithme de construction des couronnes se poursuit ainsi jusqu'à son
achèvement selon le protocole de partitionnement d'idrissa SOW [1] mais
en utilisant la clé Kinit lors des
communications.
Illustration de la formation des couronnes pour
k = 4 :
Étant donné que log2(4) = 2, on
utilisera donc 2 bits pour identifier chaque couronne. Ce cas de figure est
illustré par la figure 2.9, où nous avons quatre couronnes
numérotées de 1 à 4. Premier
slot
Pour le premier bit, on veut que les capteurs des couronnes 1
et 2 enregistrent la valeur 0 et que ceux des couronnes 3 et 4 enregistrent la
valeur 1. Étant donné que la réception du signal est
codée par la valeur 0 et la non réception par la valeur 1, le
noeud sink au premier slot doit utiliser le rayon de transmission r2.
Ainsi les capteurs des couronnes 1 et 2 enregistreront la valeur 0 tandis que
les capteurs des couronnes 3 et 4 enregistreront la valeur 1.
29
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
Deuxième slot
Puisque les capteurs des couronnes 1 et 2 ont
enregistré la valeur 0 au premier slot, ils restent
éveillés au slot 2. Le noeud sink émet en broadcast dans
le rayon r1 pour permettre aux capteurs de la couronne 1 d'enregistrer
0 et ceux de la couronnes 2 d'enregistrer la valeur 1. Comme ces capteurs ont
déjà enregistré 2 bits =log2(l), ils
s'endorment jusqu'à la fin du slot 3 = 4 - 1. Pendant le slot 2 les
capteurs des couronnes 3 et 4 sont en veille, donc ils n'enregistrent rien.
Troisième slot
Le noeud sink émet en broadcast dans le rayon
r3 pour permettre aux capteurs de la couronne 3 d'enregistrer 0 et
ceux de la couronne 4 d'enregistrer la valeur 1. Pendant le slot 3 les capteurs
des couronnes 1 et 2 sont en veille, donc ils n'enregistrent rien.
La figure 2.10a illustre la formation des couronnes pour k
= 4. On y voit clairement que tous les capteurs enregistrent leur bit de
poids fort au premier slot. Au deuxième slot, seulement les capteurs des
couronnes 1 et 2 enregistrent leur second bit. Enfin, les capteurs des
couronnes 3 et 4 enregistrent leur second bit au slot 3. Le rayon de
transmission utilisé par le noeud sink a chaque slot est aussi
mentionné. L'arbre binaire de la figure 2.10b est utilisé par le
noeud sink pour déterminer les différents slots et rayons de
transmission. Nous le définissons dans la section 2.4.4.
Méthode analytique de détermination des
rayons de transmissions omnidirectionnelles
Considérons l'arbre binaire A complet à
l feuilles numérotées de 1 à l comme le
montre la figure 2.11. Pour chaque sommet, l'arête menant à son
sous arbre gauche est étiquetée par 0 et
celle menant à son sous arbre droit est
étiquetée par 1. Soit x, (1 x l), le
numéro d'une
feuille quelconque u de l'arbre A et
b1, b2, ...,
blog2(l)
les étiquettes de l'unique chemin allant de la racine
jusqu'à u;. On a :
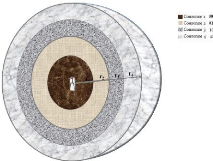
FIGURE 2.9: Formation des couronnes
30
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL

(a) (b)
FIGURE 2.10: Formation des couronnes pour k = 4
|
1 =
|
1
|
+ 0×2log2(4))-1 +
0×2log2(4))-2 ,
|
log2(4) = 2
|
|
2 =
|
1
|
+ 0×22-1 + 1×22-2
|
|
|
3 =
|
1
|
+ 1×22-1 + 0×22-2
|
|
|
4 =
|
1
|
+ 1×22-1 + 1×22-2
|
|
|
Doù la formule:
|
|
log2(l)
|
|
|
x = 1 +
|
X
j=1
|
bj2log2(l)-j
(2.2)
|
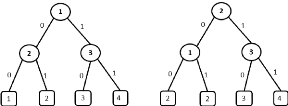
(a) Parcours préfixé. (b) Parcours
infixé.
FIGURE 2.11: Étiquetage et parcours.
Soit A, le sous arbre constitué
essentiellement des noeuds internes de A numérotés dans
le parcours préfixé de 1 à l - 1 comme l'indique
la figure 2.11a. Soit u un sommet quelconque de A et
b1, b2, ...,
blog2(l) les
étiquettes de l'unique chemin allant de la racine jusqu'à
u; j est la profondeur de u. Les lemmes
ci-après sont tirés de [22].
Lemme 1. Le rang de u dans le parcours
préfixé de A' est donné par la
formule:
p(u) = 1 + i-1X Cj
(2.3)
j=1
|
Avec Cj =
|
?
?
?
|
1 si bj = 0
2j si bj = 1 l
|
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
Preuve. Pour la racine, on
a p(rac) = 1 + P0 j=1 C1 = 1. Supposons la formule
vraie pour un noeud quelconque x/p(x) < p(u); soit v le
père de u; alors u et v partagent l'unique
chemin b1b2...bi-2. Donc, p(v) = 1 +
Pi-2
j=1 Cj et comme u est le fils de v
, on a :
|
p(u) = p(v) +
|
?
?
?
|
1 si u est le fils gauche de v
2i-1 si u est le fils gauche de v
k
|
|
d'où p(u) = 1+
|
i-2
X
j=1
|
Cj + Ci-1 =
|
i-1X j=1
|
Cj
|
31
Considérons A' dans son parcours
infixé comme le montre la figure 2.11b.
Lemme 2. Soit u un sommet quelconque
de A et n(u) son rang dans le parcours infixé de A
. Soit t le rang de la feuille de A la plus à
droite dans le sous arbre gauche enraciné en u. Alors, n(u)
est donné par:
n(u) = t (2.4)
Preuve. On procède
par récurrence sur l'ordre de visite des sommets de A'
par un parcours infixe. Pour n(u) = 1, u est la
feuille la plus à gauche dans A' et son sous arbre
gauche dans A se résume à la feuille la plus à
gauche dans A.
Supposons la propriété est vraie pour tout
sommet x de A' tel que n(x) < n(u). On
distingue alors deux cas :
Premier cas Soit v un parent de u
dans A'. Notons par A'(v) le sous
arbre de A' enraciné en v. Le sommet u
est dans ce cas, la feuille la plus à gauche dans le sous arbre
droit de A'(v). Soit q le rang de la feuille de
A la plus à droite dans le sous arbre gauche de
A'(v). Par hypothèse de récurrence n(v) =
q. Puisque u est une feuille dans A', il
possède deux fils (feuilles) de rang q + 1 et q + 2
dans A. Alors dans ce cas n(u) = n(v) + 1 = q + 1.
Deuxième cas Soit u un parent de
v dans A'. Notons par A'(u) le
sous arbre de A' enraciné en u. Le sommet
v est dans ce cas, la feuille la plus à droite dans le sous
arbre gauche de A'(u). Supposons que n(u) = r. Le
sommet v il possède deux fils (feuilles) dans A. Par
hypothèse de récurrence ces fils sont au rang r et r
+ 1. Par conséquent n(u) = n(v) + 1 = r + 1.
Pour la méthode de détermination des rayons de
transmission omnidirectionnelles, les paramètres p(u) et
n(u) des sommets internes de A correspondent respectivement
aux découpes de temps en des instants appelés slots et
aux rayons de transmissions utilisés par le noeud sink. Soit
i un entier tel que 2 i log2(k) -
1, supposons qu'un noeud u a renseigné son (i
- 1)e bit de poids fort à la fin du slot
s. Le résultat qui suit est une conséquence des lemmes 1
et 2.
Corollaire 2. En ayant lu les bits
b1b2...bi-1, le capteur u doit
se réveiller au slot z = p(u) :
z = p(u) = 1 + i-1X Cj (2.5)
j=1
32
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
Ainsi, lorsqu'un capteur quelconque a enregistré 1 comme
son ie bit / i <
log2(l) au slot j, il
s'endort et se réveille au slot k où k est le
rang du fils droit du noeud interne de profondeur
j dans le parcours infixé de A.
l
Alors,k = j + (2.6)
2i
Si on se place dans notre exemple pour l = 4, les
capteurs des zones 3 et 4 après avoir enregistré la valeur 1 pour
leur premier bit (i = 1) au slot 1, ils dorment et se
réveillent au début du slot
k = 3.
4
= 3
k = 1 + 21
Formation et méthode de détermination des
sections horizontales
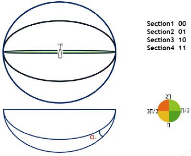
FIGURE 2.12: Formation des sections
horizontales
Ici, on subdivise l'espace de déploiement en m
sections angulaires horizontales d'angles égaux à
áh comme le montre la figure 2.12. Comme dans le cas
précédant les capteurs doivent lire une chaîne de longueur
log2(m) pour déterminer
l'identité de leur section horizontale. Le temps est
découpé en slots s1,
s2, ..., sm-1
et à chaque slot correspond une émission
directionnelle d'angle âi. Pour les capteurs, le
procédé est similaire à celui de formation des couronnes.
La réception d'un signal est codée par 0 et la non
réception du signal par 1. La différence ici se situe au niveau
du noeud sink qui n'effectue plus des transmissions omnidirectionnelles, mais
plutôt des transmissions directionnelles selon un angle
âi. Le noeud sink utilise le même arbre binaire A
de la figure 2.11 pour déterminer les différents angles de
transmission directionnelles. Le parcours préfixé
détermine les différents slots p(A) =
s1, s2, ...,
sm-1. Le parcours infixé
donne un second paramètre n(A) qui permet de calculer
les angles d'émission du noeud sink.
Soit u un noeud quelconque de A',
p(u) son rang dans le parcours préfixé de
A' et n(u) son rang dans le parcours
infixé de A'. La direction d'émission du
noeud sink au slot p(u) est donnée par:
âi = n(u) X
2ð/m (2.7)
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
Le tableau 2.1 récapitule les différents slots et
angles de transmission pour m = 4.
|
Préfixe de A : p(A)
|
Infixe de A : n(A)
|
Direction de lantenne : âi
|
|
1
|
2
|
n(u) X 2ir/m = 2
X 2ir/4 = ð
|
|
2
|
1
|
ir/2
|
|
3
|
3
|
3ir/2
|
TABLE 2.1: Calcul des angles de transmissions
horizontales pour m=4
Illustration de la formation des sections horizontales
pour k = 4 :
Premier slot
Au premier slot, les capteurs des sections 1 et 2 doivent
enregistrer la valeur 0 et ceux des sections 3 et 4 la valeur 1. Le noeud sink
au premier slot utilise l'angle de transmission horizontale âi =
2ð 2 = ir. Ainsi les capteurs des sections 1 et 2
enregistreront la valeur 0 tandis que les capteurs des sections 3 et 4
enregistreront la valeur 1.
Deuxième slot
Étant donné que les capteurs des sections 1 et 2
ont enregistré la valeur 0 au premier slot, ils restent
éveillés au slot 2. Le noeud sink effectue une transmission
horizontale d'angle 2 pour permettre aux capteurs de la section 1
d'enregistrer 0 et ceux de la section 2 d'enregistrer la valeur 1. Puisque les
capteurs des sections 1 et 2 ont déjà enregistré leur 2
bits, ils s'endorment jusqu'à la fin du slot 3. Pendant le slot 2, les
capteurs de la section 3 et 4 sont en veille, donc ils n'enregistrent rien.
Troisième slot
Le noeud sink émet une transmission horizontale
d'angle3ð 2 pour permettre aux capteurs de la section 3
d'enregistrer 0 et ceux de la section 4 d'enregistrer le valeur 1. Pendant le
slot 3, les capteurs de la section 1 et 2 sont en veille, donc ils
n'enregistrent rien.
Le tableau 2.2 récapitule les différents slots et
angles de transmissions horizontales pour
m = 8. La figure 2.13 illustre les angles de
transmission dont il est question dans le tableau 2.2.
|
Préfixe de A : p(A)
|
infixe de A : n(A)
|
Direction de lantenne : âi
|
|
1
|
2
|
n(u) x 2ir/m =
ir
|
|
2
|
4
|
ir/2
|
|
3
|
1
|
ir/4
|
|
4
|
3
|
3ir/4
|
|
5
|
6
|
3ir/2
|
|
6
|
5
|
5ir/2
|
|
7
|
7
|
7ir/2
|
33
TABLE 2.2: Calcul des angles de transmissions
horizontales pour m = 8.
34
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL
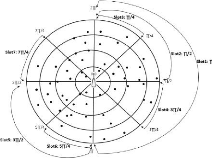
FIGURE 2.13: Les différents angles
d'émission du noeud sink pour in = 8.
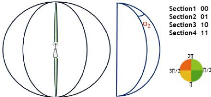
FIGURE 2.14: Formation des sections verticales
Formation et méthode de détermination des sections
verticales.
Ici, on subdivise l'espace de déploiement en n
sections angulaires verticales d'angles égal à
áv=2ð/n comme le montre la figure 2.14.
Comme dans le cas précédent les capteurs doivent lire une
chaîne de longueur log2(n) pour déterminer
l'identité de la section verticale dans laquelle ils se trouvent. Le
temps est découpé en slots et à chaque slot correspond une
émission directionnelle d'angle /3j. Le procédé
est similaire à celui de formation des sections horizontales. On utilise
le même arbre binaire A, définis dans la section 2.4.4.
Les tableaux récapitulant les différents slots et angles de
transmissions verticales pour n = 4 et n = 8, sont pareilles
à ceux des angles de transmissions horizontales définis dans la
section 2.4.4. Il en est de même pour la figure 2.13, qui illustre les
différent angles des transmission dont il est question dans le tableau
2.2. Ici le noeud sink effectue plutôt des transmission directionnelles
verticales comme l'illustre la figure 2.14.
Récapitulatif pour la formation des clusters de la
sphère la plus interne
La figure 2.15 retrace sommairement les trois phases de notre
algorithme de partitionnement pour les capteurs se trouvant dans la couronne de
rayon r1. Initialement, les capteurs n'ont
35
CHAPITRE 2. LES PROTOCOLES DE CLUSTERING DANS LES RÉSEAUX
DE CAPTEURS SANS FIL

FIGURE 2.15: Récapitulatif pour la
formation des clusters de la sphère la plus interne
aucune idée de leur emplacement.
Phase 1 : tous les capteurs enregistrent leur
numéro de couronne; Phase 2 : ils enregistrent leur
numéro de section horizontale; Phase 3 : ils
enregistrent leur numéro de section verticale.
Theoreme 1. Le temps d'exécution total de
l'algorithme de partitionnement de l'espace d'intérêt est
donné par :
T = (l - 1) x ô + (m - 1) x ô + (n - 1) x ô
= (l + m + n - 3) x ô (2.8)
Preuve. L'étape de
formation des couronnes nécessite (l - 1) slots, et un slot
dure ô temps. Il en est de même pour la formation des
m sections horizontales et des n sections verticales.
2.5 Conclusion
Dans ce chapitre, nous avons présenté quelques
algorithmes de partitionnement centré sur le noeud à l'instar de
l'algorithme de clustérisation de Gerla et Tsai et ceux de Basagni et
ensuite, ceux centré sur le cluster parmi lesquels le schéma de
clustérisation de Sun et al., l'algorithme de Banerjee et al. et
l'architecture virtuelle de A.Wadaa et al. Nous remarquons que chaque protocole
est une amélioration de l'autre. L'algorithme de A Waada et al. permet
d'avoir une architecture virtuelle uniquement pour une surface plane.
D'où le protocole de partitionnement en 3D pour un réseau
déployé dans l'espace. Il serait intéressant de voir
comment ils peuvent être utilisées pour résoudre
efficacement le problème de geocasting.
36
Chapitre 3
Sécurité dans les Réseaux de
Capteurs
Sans Fil
Sommaire
3.1 Introduction 36
3.2 Principes d'attaques et d'attaquants 37
3.3 Politiques de sécurité dans les RCSFs
38
3.4 Taxonomie des attaques 38
3.4.1 Attaques passives 39
3.4.2 Attaques actives 39
3.4.3 Attaques physiques 42
3.5 Mécanismes de sécurité 42
3.5.1 Le partitionnement de données 42
3.5.2 La cryptographie 43
3.5.3 Détection d'intrusions 44
3.6 Conclusion 44
3.1 Introduction
Les RCSFs sont souvent très denses et
déployés dans des zones à risques pour des applications
sensibles où l'information récoltée est d'une importance
capitale pour l'utilisateur final du réseau. Les conditions de
déploiement et la nature de l'information captée exige un niveau
de sécurité important pour contrer les différents types
d'attaques sur la topologie du réseau et le routage de données
tout en respectant les contraintes des RCSFs et le maintien de leurs
performances. Plusieurs solutions existent pour assurer un routage efficace
d'informations en contournant les nombreuses contraintes influençant le
bon fonctionnement du réseau. Deux de ces contraintes sont essentielles
: i) assurer une consommation raisonnable d'énergie afin de prolonger la
durée de vie des noeuds capteurs et par conséquent la
durée de vie du réseau
37
CHAPITRE 3. SÉCURITÉ DANS LES
RÉSEAUX DE CAPTEURS SANS FIL
et ii) garantir des communications sécurisées
où les utilisateurs légitimes sont authentifiés et
l'information véhiculée est fraiche, disponible et
confidentielle. Dans ce chapitre, Nous allons présenter une taxonomie
des attaques sur les RCSFs, par la suite, nous présenterons quelques
défis et solutions de sécurité présentes dans la
littérature.
3.2 Principes d'attaques et d'attaquants
Une attaque [30] peut être définie comme une
tentative d'accès illégale à une ressource du
système. Les attaques visent essentiellement les liens de communication
et les entités du réseau afin de s'autoriser à
récupérer et manipuler les données
échangées. Un attaquant est une personne qui s'intéresse
au fonctionnement du réseau dans le but de s'adjuger les moyens et le
pouvoir de déjouer la sécurité du système.
L'existence d'un noeud compromis est très problématique car cela
nécessite de revoir complètement la politique de
sécurité appliquée. Les attaquants d'un RCSF peuvent
opérer à deux niveaux : s'attaquer aux informations
échangées entre les noeuds et s'attaquer aux noeuds
eux-mêmes. Ils se classent en plusieurs catégories en fonction de
leurs objectifs et de leurs capacités de nuisance. On distingue [31] :
les attaquants passifs dont l'objectif est d'analyser et de
récupérer les informations qui circulent sur le réseau
sans toutefois toucher à son fonctionnement; les attaquants
actifs qui visent à détruire le réseau par la
compromission ou la destruction physique de ses noeuds; les attaquants
externes qui essayent d'infiltrer le réseau de
l'extérieur en exploitant certaines failles de sécurité et
enfin les attaquants internes qui revendiquent leurs
appartenances au réseau afin d'accéder aux ressources du
système.
Tenant compte du fait que les capteurs sont limités par
leur puissance d'énergie et de calcul, les solutions de
sécurité doivent relever les défis suivants :
Minimiser la consommation d'énergie :
l'objectif est de concevoir des mécanismes de sécurité
performants et économes en énergie. L'énergie
dissipée pour assurer les fonctions de sécurité est
utilisée pour le calcul, la transmission des certificats de
sécurité, les chiffrages, déchiffrages, signatures,
vérifications des signatures et le stockage des paramètres de
sécurité.
S'adapter à l'environnement de
déploiement : dans la plupart des applications des RCSFs, les
noeuds sont déployés dans des zones hostiles ce qui rend leur
compromission assez facile. Les mécanismes de sécurité
doivent détecter et réagir rapidement à la capture et
à la compromission des noeuds afin de changer les paramètres de
sécurité appliqués.
Contourner l'absence de la sécurité
physique des capteurs : la topologie des RCSF les rends exposés
à différents types d'attaques pouvant survenir de toute part et
qui cible n'importe quel entité du réseau. L'absence d'une
sécurité physique, contrairement aux réseaux filaires
où la sécurité est renforcée par des firewalls,
doit être contournée par des techniques de détection
d'intrusions.
Développer des schémas propres aux
communications sans-fil : les solutions classiques de
sécurité pour les réseaux filaires et autres types de
réseaux sans fil sont inapplicables
38
CHAPITRE 3. SÉCURITÉ DANS LES
RÉSEAUX DE CAPTEURS SANS FIL
aux RCSF. Les mécanismes de sécurité
doivent coupler le médium de communication sans-fil utilisé aux
caractéristiques spécifiques aux réseaux de capteurs sans
fil.
3.3 Politiques de sécurité dans les
RCSFs
Une politique de sécurité dans les RCSFs est un
ensemble de mécanismes, d'algorithmes, de procédures et de
schémas cohérents conçus pour maintenir un certain niveau
de sécurité. Une politique de sécurité doit assurer
au minimum : i) un contrôle d'accès : détecter et
interdire l'ajout de nouveaux éléments corrompus au
réseau; ii) l'intégrité et iii) la
confidentialité des données transmises. Les protocoles de
sécurité reposent sur les politiques telles que: la
sécurité des communication (choisir des outils
adéquats pour l'établissement de liens sécurisés
entre les noeuds communicants), la sécurité du routage et
des données agrégées (l'accès aux
données pour les agréger, les filtrer ou les compresser doit se
faire uniquement par les noeuds autorisés du réseau) et la
sécurité physique des noeuds (protéger les noeuds contre
toute tentative de compromission, détecter et mettre en quarantaine les
noeuds compromis). Quant au routage, sa politique de sécurité
concerne les différents niveaux de communication selon la topologie du
réseau et le type de routage appliqué pour acheminer les
informations. Comme le montre la figure 3.1, sa stratégie de
sécurité met en avant la sécurité des liens, la
sécurité intra-cluster, la sécurité inter-cluster
et la sécurité noeud du réseau - station de base.
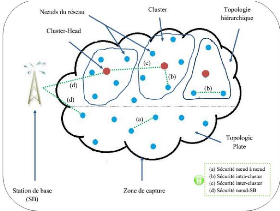
FIGURE 3.1: Stratégies de
sécurité dans un RcSF
3.4 Taxonomie des attaques
Dans cette section, nous allons présenter une série
des menaces (liste non exhaustive) les plus redoutables et les plus connues sur
le routage de données dans les RCSFs [32].
CHAPITRE 3. SÉCURITÉ DANS LES
RÉSEAUX DE CAPTEURS SANS FIL
3.4.1 Attaques passives
Dans ce type d'attaques, généralement,
l'attaquant passe inaperçu. En effet, son objectif est d'écouter
le réseau sans chambouler ou altérer son fonctionnement. Pendant
ce temps, aucun paquet de données n'est émis sur le réseau
par l'attaquant ce qui rend sa détection très difficile.
L'objectif de ces attaques est d'analyser les paquets de données
circulant sur le réseau et d'extraire des informations
précieuses, d'une part, et d'analyser les chemins empruntés par
ces paquets de données afin de se procurer des informations
stratégiques sur le fonctionnement global du réseau comme la
position de la BS, l'identité des CHs etc. D'autres parts, les
informations obtenues par un attaquant passif peuvent être
utilisées pour créer des attaques actives [33].
3.4.2 Attaques actives
Contrairement aux attaques passives, les attaques actives
visent à modifier l'état du réseau. En effet, un attaquant
émet périodiquement des paquets de données sur le
réseau pour différents objectifs qu'on va énumérer
en présentant quelques techniques d'attaques sur le routage, les plus
répandues pour les RCSFs. Les menaces actives appartiennent
principalement à quatre catégories illustrées par la
figure3.2) :
· Interruption : Vise la disponibilité des
données.
· Interception : Vise la confidentialité des
données.
· Modification : Vise l'intégrité des
données.
· Fabrication : Vise l'authenticité des
données.
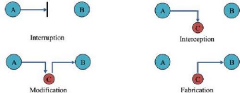
39
FIGURE 3.2: Types d'attaques actives
Parmi les attaques actives, nous pouvons citer (liste non
exhaustive) :
Jamming attack : cette attaque sévit
au niveau de la couche physique, son objectif est de causer un déni de
service(DoS) en émettant des signaux à une certaine
fréquence, proche de celle utilisée dans le réseau, sur le
médium de communication afin de le saturer pour que les noeuds ne
puissent pas communiquer [34] entre eux.
Usurpation d'identité : c'est l'une
des attaques les plus dommageables dans les réseaux informatiques en
général et les réseaux de capteurs en particulier. Elle
permet à un attaquant
40
CHAPITRE 3. SÉCURITÉ DANS LES
RÉSEAUX DE CAPTEURS SANS FIL
de confisquer l'identité de sa victime pour
s'acquérir les privilèges qui lui sont associés.
Typiquement, l'attaquant se limite uniquement à emprunter
l'identité de l'un des noeuds communicants, la source ou la destination,
pour pouvoir lire et transmettre des messages en utilisant les
coordonnées de sa victime. Cette attaque est initiée par un type
d'attaquant appelé man-in-the-middle (la technique de l'homme au
milieu).
Sinkhole attack (l'attaque du trou de la
base) : l'attaquant devient attractif en proposant des chemins optimaux pour
atteindre la station de base avec des connexions puissantes ce qui pousse les
noeuds émetteurs à modifier leurs tables de routage pour
acheminer les données par ce noeud malicieux. Ainsi, toutes les
informations qui y transitent pourront être
récupérées par l'attaquant [35] .
Wormhole attack (l'attaque du trou de ver) :
ce type d'attaques nécessite au moins deux noeuds malicieux. Les deux
noeuds sont liés par une liaison radio puissante ou par une liaison
filaire. Ce chemin attaquant-attaquant est à un saut donc plus rapide et
plus optimal ce qui facilite la création de deux noeuds attaquants de
type Sinkhole attack et permettre à chacun des deux de
récupérer des informations dans un point du réseau, les
modifier, puis les transmettre sur l'autre point du réseau en ignorant
les noeuds intermédiaires. Les informations compromises seront
envoyées vers la BS [35]. Les protocoles victimes de ce type
d'attaques sont ceux basés sur i) la latence de routes, ii) la
première route découverte et iii) le nombre de sauts pour
atteindre la destination.[35]
Blackhole attack (l'attaque du trou noir) :
le principe est d'insérer un nouveau noeud ou bien compromettre un noeud
du réseau pour obliger un maximum de voisins à modifier leurs
tables de routage et faire transiter leurs données émises par ce
noeud malicieux. Les informations reçues par ce dernier seront
détruites et ne seront jamais réinsérées sur le
réseau. Blackhole attack vise souvent les architectures
hiérarchiques et plus particulièrement les noeuds
agrégateurs.
Rushing attack : cette attaque vise
particulièrement les protocoles de routage basés sur la
première route découverte [36]. Lors du processus
d'établissement de routes par la diffusion de requêtes, et
à la réception d'une requête de construction, l'attaquant
émet automatiquement une réponse via un ou plusieurs noeuds
malicieux insérés dans le réseau même si aucune
information sur la destination n'est disponible sur sa table de routage
(c'est-à-dire que l'attaquant n'est pas concerné par la
requête). Cette réponse lui permet, à fortes chances,
d'être choisi comme noeud intermédiaire dans le routage de
données. Les informations qui lui seront destinées seront alors
compromises.
Routing table poisoning : l'attaquant
encombre le réseau avec de fausses informations sur des routes fictives
ce qui contraint les noeuds à mettre à jour excessivement leurs
tables de
41
CHAPITRE 3. SÉCURITÉ DANS LES
RÉSEAUX DE CAPTEURS SANS FIL
routage. Les mises à jour engendrent un
débordement et les tables de routage seront remplies et saturées
par de fausses informations sur les routes.
Sybil attack : l'objectif de cette attaque
est de faire passer le noeud malicieux pour plusieurs noeuds en lui endossant
plusieurs identités, afin de créer une multitude de chemins
passant par ce noeud qui ne sont en réalité qu'un seul chemin.
Sybil attack s'intéresse aux protocoles basés sur l'instauration
d'une redondance de chemin pour assurer la fiabilité du réseau
[37].
Flooding attack : l'objectif de cette attaque
est de provoquer un déni de service (DoS). En effet, un ou plusieurs
noeuds malicieux du réseau effectuent des envois réguliers de
messages à une puissance d'émission forte dans le but de saturer
le réseau [38].
Hello flooding attack : l'objectif de cette
attaque est de consommer l'énergie des noeuds capteurs, notamment les
plus éloignés, par un envoi continu, à un signal puissant
des messages de découverte du voisinage de type HELLO. Les noeuds
destinataires du message essayent de répondre au noeud malicieux
même s'ils sont situés à des distances lointaines ne
permettant pas de l'atteindre. A force de tenter de lui répondre, tous
les noeuds concernés par ce message HELLO consomment
l'intégralité de leur énergie.
Écoute passive : Cette attaque
consiste à écouter le réseau et à intercepter les
informations circulant dans le médium. Elle est facilement
réalisable si les messages circulant dans le ré- seau ne sont pas
cryptés. De par sa nature passive, l'écoute passive est
difficilement détectable car elle ne modifie pas la structure du
réseau.
Insertion de boucles infinies: cette attaque
vise à consommer l'énergie des noeuds capteurs en modifiant leurs
tables de routage de manière à générer des boucles
infinies entre les noeuds.
Injection ou altération de messages :
le principe est d'injecter sur le réseau des messages véhiculant
de fausses informations sur le routage ou bien récupérer puis
altérer les messages circulant sur le réseau. L'objectif d'une
telle attaque est de perturber la fonction du routage et donc le fonctionnement
global du réseau.
Réplication de données : cette
attaque vise la fraicheur des données échangées sur le
réseau. En effet, l'attaquant récupère et enregistre des
informations au temps (T) puis les reproduire sur le réseau au temps
(T+N). Ceci va tromper le système de surveillance et des
décisions erronées seront prises. Pour illustrer ce cas, on cite
l'exemple d'un RcSF ayant pour mission la détection d'un départ
d'incendie. Si un incendie se déclare au temps (T), l'attaquant
récupère cette information et va la reproduire
ultérieurement faisant croire au centre de contrôle qu'un nouvel
incendie s'est produit.
42
CHAPITRE 3. SÉCURITÉ DANS LES
RÉSEAUX DE CAPTEURS SANS FIL
Attaque du trou noir (Black Hole Attack)
Cette attaque consiste tout d'abord à insérer un noeud malicieux
dans le réseau. Par divers moyens, ce noeud va modifier les tables de
routage pour obliger le maximum de noeuds voisins à faire passer toutes
les informations à transmettre par lui. Ensuite, comme un trou noir dans
l'espace, les informations qui vont passer par ce noeud ne seront jamais
retransmises.
3.4.3 Attaques physiques
Dans la plupart des applications de RCSF, les capteurs sont
déployés dans des zones inaccessibles au coeur du territoire
ennemi. Le risque d'exposition aux attaques ennemies est très
présent, parmi elles on cite :
Destruction physique : l'ennemi ou toute
personne étrangère à l'application du RCSF, se trouvant
sur le périmètre de déploiement, peut subtiliser des
noeuds capteurs pour les détruire et ainsi faire perdre au réseau
sa connectivité et le diviser en sous réseaux incapables de
communiquer entre eux et avec la BS [39, 40].
Attaques spécifiques aux types de capteurs
: en déduisant le type et la tâche du capteur
déployé, l'attaquant peut le faire réagir en produisant un
événement attendu par le capteur, comme allumer une lampe devant
un capteur de luminosité ou allumer une flamme devant un capteur
thermique. Le capteur réagit et transmet de fausses informations en
continu à la BS jusqu'à l'épuisement de son
énergie.
Empêcher le capteur de se mettre en veille
: l'attaquant essaye d'empêcher un noeud capteur de se mettre en
veille par différents moyens. Le fonctionnement sans cesse du capteur
lui causera la perte de son énergie
3.5 Mécanismes de sécurité
Plusieurs solutions ont été
développées pour lutter contre les attaques sur les RCSFs. On
distingue des solutions spéciales au routage où la fonction de
sécurité concerne la protection de la donnée transmise,
d'autres solutions sont conçues pour protéger les communications
entre les noeuds capteurs en assurant la fiabilité des liaisons par des
fonctions cryptographiques, et enfin des solutions qui se chargent de
protéger les noeuds du réseau, de détecter et d'exclure
les noeuds malicieux par des mécanismes de détection
d'intrusions. Dans [41], on propose les mécanismes simples, les plus
efficaces et les plus appropriés aux RCSFs, regroupés selon
l'objectif de la solution proposée.
3.5.1 Le partitionnement de données
C'est une solution proposée dans le but
d'empêcher les attaquants de récupérer
l'intégralité des informations qui circulent sur le
réseau. Le principe est de découper, au niveau du noeud source,
l'information à transmettre en plusieurs paquets de tailles fixes et
chaque paquet de
43
CHAPITRE 3. SÉCURITÉ DANS LES
RÉSEAUX DE CAPTEURS SANS FIL
données sera envoyé sur un chemin
différent. L'entité de destination finale, après la
réception de tous les paquets de données, procède à
la reconstitution du message initial émis par le noeud source. Afin de
saisir intégralement l'information échangée entre la
source et sa destination, un attaquant doit scruter tous les chemins
utilisés dans la transmission du message, ce qui est difficile voire
impossible vu la taille des réseaux et le nombre important de chemins
possibles entre chaque paire de noeuds. Cependant, cette solution est gourmande
en énergie car elle implique un grand nombre de noeuds pour acheminer
chaque paquet vers l'entité destinataire. Un exemple d'une telle
solution est donné par la figure3.3.
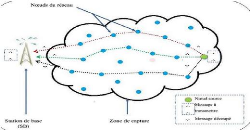
FIGURE 3.3: Technique de partitionnement des données
3.5.2 La cryptographie
Le mot cryptographie est composé de deux mots grecs :
« crypto » qui signifie caché et « graphie » qui
signifie écrire, d'où la signification complète de la
cryptographie est « l'écriture secrète ». La
cryptographie est définie comme la science qui convertit les
informations en clair en informations cryptées c'est-à-dire
codées [42]. Le principe est donné par la figure3.4. La plupart
des mécanismes de sécurité des communications sont
basés sur des outils cryptographiques utilisant des informations
secrètes représentées par des nombres premiers, dites
clés, combinées en entrée d'une opération
cryptographique, au message à coder pour produire le message
crypté. On distingue quatre types de clés utilisées dans
les opérations cryptographiques [42] : clé individuelle,
clé par paire, clé de groupe et clé globale. Cependant,
les solutions cryptographiques

FIGURE 3.4: Principe de la cryptographie
ne sont intéressantes que lorsque l'attaquant ne
désire que lire le contenu des messages. Si un
attaquant ne
désire que supprimer un message, alors ces solutions ne sont plus
très appropriées.
44
CHAPITRE 3. SÉCURITÉ DANS LES
RÉSEAUX DE CAPTEURS SANS FIL
3.5.3 Détection d'intrusions
Détection d'intrusions par localisation
: ici, les noeuds capteurs doivent être équipés de
moyens qui permettent de connaitre leurs positions géographiques
(exemple le GPS). Ce type de noeuds capteurs sont dits capteurs balises. Si un
capteur souhaite faire partie du réseau, il adresse une demande
d'insertion aux capteurs balises afin d'estimer sa localisation par rapport au
domaine d'écoute. Les capteurs balises vont quadriller par la suite
leurs zones d'écoutes respectives et demandent aux noeuds qui ont
reçu la demande d'insertion de voter pour la zone de quadrillage qu'ils
peuvent entendre. La zone qui obtient le plus de voix sera
considérée comme celle où est censé se trouver le
capteur.
Détection d'intrusions par indice de confiance:
contrairement à la solution de détection d'intrusions
présentée précédemment où des moyens
supplémentaires et couteux sont exigés, la détection
d'intrusions par indice de confiance consiste à générer
une alerte pour tout scénario ou comportement suspect
détecté.
Approche par comportements : observer le
comportement du système et le comparer au comportement normal. Si le
comportement observé est différent du comportement normal, on
conclut que le système présente des anomalies et fait objet
d'intrusions. L'avantage est la rapidité et la simplicité de
détection alors que l'inconvénient est le nombre important de
faux positifs que le système détecte à cause
d'éventuels changements inattendus qui ne correspondent pas à des
attaques.
Approche par scénarios : son
fonctionnement ressemble beaucoup au fonctionnement des anti-virus et des
anti-trojan des systèmes informatiques classiques. En effet, on utilise
une base de signatures où sont répertoriés les
différents scénarios d'attaques. Les données reçues
sont analysées afin de détecter d'éventuels
scénarios d'attaques prédéfinis dans la base de
signatures. Cette approche présente l'avantage de précision de
diagnostic par rapport à l'approche par comportement mais elle est
incapable de détecter les nouvelles attaques non
répertoriées.
3.6 Conclusion
Le développement de mécanismes de
sécurité spécifiques aux RCSFs a attiré une grande
part d'intention parmi les chercheurs de la communauté scientifique du
domaine. En outre, les solutions de sécurité proposées
pour les autres réseaux sans fil (ad hoc, Wifi, Bluetooth. . . etc.) ne
sont pas applicables directement dans les RCSF. En effet, l'absence de
sécurité physique et les limites en ressources
énergétiques des capteurs, entre autres, s'imposent comme
contraintes importantes dans la conception des solutions de
sécurité efficaces et économes en énergie pour les
RCSFs.
45
Chapitre 4
Protocoles de Geocasting dans les
réseaux de capteurs sans fil
|
Sommaire
|
|
|
|
4.1
4.2
|
Introduction
Algorithmes de géocasting sans garantie de
livraison.
46
|
45
|
|
4.2.1
|
Algorithme de KO-VAIDYA
|
46
|
|
4.2.2
|
Les protocoles LBM,VDBG,GeoGRID et GeoTORA
|
47
|
|
4.3
|
Algorithme de géocasting avec garantie de
livraison
|
48
|
|
4.3.1
|
Algorithme de Seada et Helmy
|
48
|
|
4.3.2
|
Algorithme de Bomgni et al.
49
|
|
|
4.3.3
|
Protocole de Myoupo et al.
51
|
|
|
4.4
|
Conclusion
|
55
|
4.1 Introduction
Le geocasting qui est une variante du multicasting a
été proposé comme mécanisme pour adresser des
messages à tous les hôtes d'une région géographique
donnée. Dans le multicasting classique, un hôte devient membre du
groupe de multicast en le rejoignant explicitement. Dans le cas du geocasting,
l'hôte devient automatiquement membre du groupe de géocast si sa
position géographique est en conformité avec la région
spécifiée pour le geocast (il perd donc sa qualité de
membre s'il se déplace hors de cette région). La technique la
plus évidente pour résoudre le problème de geocasting, est
l'utilisation de l'inondation simple (flooding en anglais) :
la station de base (BS) envoie un message à tous ses voisins qui
à leur tour, relaient le message à leurs propres voisins et ainsi
de suite, jusqu'à ce que tous les capteurs des régions
géocast soient atteints et aient une connaissance du message. Mais cette
approche induit plusieurs problèmes tels que la surcharge du
réseau, les collisions, etc. Une autre technique consiste dans le
paquet
46
CHAPITRE 4. PROTOCOLES DE GEOCASTING DANS LES RÉSEAUX DE
CAPTEURS SANS FIL
géocast à définir implicitement ou
explicitement une zone appelée forwarding zone. Un noeud n'a le
droit de diffuser le paquet géocast à tous ses voisins que s'il
appartient à cette zone. Ainsi, le paquet géocast sera
diffusé par un petit ensemble de noeuds réduisant ainsi la
surcharge du réseau par rapport à l'inondation simple. Pour
accroitre la probabilité qu'un paquet géocast soit transmis
à tous les noeuds de la région de géocast, la forwarding
zone doit inclure en plus de la région de géocast certaines zones
autour de celle-ci. En effet, dans le cas où la source n'appartient pas
à la région de géocast, ladite source et les noeuds sur le
chemin menant à la région de géocast doivent appartenir
à la forwarding zone.
Outre l'aspect évident d'inondations, de nombreuses
techniques ont été développés dans la
littérature, les uns garantissant la réception du paquet par tous
les noeuds de la région et les autres non. Dans ce qui suit, nous allons
tout d'abord présenter quelques algorithmes de géocasting sans
garantie de livraison. puis, par la suite, présenter ceux avec garantie
de livraison et économe en énergie.
4.2 Algorithmes de géocasting sans garantie de
livraison. 4.2.1 Algorithme de KO-VAIDYA
Les auteurs en [43] ont proposés trois protocoles pour
la résolution du problème de geocas-ting : le static zone
scheme, l'adaptive zone scheme et l'adaptive distance scheme. La
définition de la forwarding zone est l'élément substantiel
qui diffèrent dans les trois solutions. Cette technique permet de
diminuer la surcharge, le taux de collisions par rapport au flooding simple en
ce sens que seul un sous-groupe de l'ensemble des noeuds exécute le
flooding.
Static Zone Scheme
La forwarding zone ici est rectangulaire. C'est le plus petit
rectangle comprenant la source et la région de geocast ou tout autre
polygone. La source peut donc déterminer les quatre points de la
forwarding zone et inclure leurs coordonnées dans le paquet geocast
à transmettre. Ainsi, Chaque paquet geocast contient une description de
cette zone qui statique durant tout le parcours du paquet de l'origine
jusqu'à la destination. Lorsqu'un noeud reçoit le paquet geocast,
il le supprime s'il ne se trouve pas dans la forwarding zone constituée
du rectangle. Le terme statique ici est justifié par le fait que la
forwarding zone spécifiée dans le paquet geocast par la source
n'est modifiée par aucun autre noeud. Ainsi, la forwarding zone reste
statique durant tout le processus de geocasting.
Adaptive zone scheme
Avec cette technique, la fowarding zone est redéfinie
à chaque noeud intermédiaire sur le parcours du paquet. Ce
protocole est identique au précédent en ce sens que lorsqu'un
noeud X
47
CHAPITRE 4. PROTOCOLES DE GEOCASTING DANS LES RÉSEAUX DE
CAPTEURS SANS FIL
reçoit le paquet geocast, il détermine si le
paquet doit être relayé ou non en se basant sur sa situation
géographique et la définition de la forwarding zone incluse dans
le paquet geocast reçu. Dans le schéma à zone statique,
lorsqu'un noeud X diffuse un paquet geocast, la définition de
la forwarding zone dans ce paquet ne sera pas modifié pendant le
processus de diffusion. Ce n'est pas le cas du schéma à zone
adaptée. En effet, la fowarding zone n'est plus statique tout au long du
parcours du paquet. Le protocole stipule que lorsqu'un noeud A envoie
un paquet geocast, il modifie la spécification de la forwarding zone. La
nouvelle forwarding zone est constituée du plus petit rectangle
contenant le noeud A et la région geocast tel que les
côtés du rectangle soient parallèles aux axes des abscisses
et des ordonnées dans un repère orthonormé. On note tout
de même en [43] que les performances de ce protocole peuvent se
dégrader drastiquement dans certains cas (Figure 4.1).
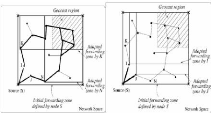
FIGURE 4.1: succès/Echec de livraison de
paquets lors de l'exécution du schéma à zone
adaptée
Adaptive distance scheme
Dans les deux variantes précédentes, la
forwarding zone est explicitement spécifiée dans le paquet
geocast. Dans le présent schéma, la source S inclut
trois informations dans le paquet geocast sans toutefois inclure explicitement
la forwarding zone : les spécifications de la région geocast, les
coordonnées du centre de la région et les coordonnées de
la source. Lorsqu'un noeud reçoit un paquet, il calcule la distance qui
le sépare du centre de la région de geocast et la compare
à celle de l'émetteur du message. Le résultat permet de
décider s'il faut détruire ou réémettre le
paquet
4.2.2 Les protocoles LBM,VDBG,GeoGRID et GeoTORA
Le LBM est un protocole basé sur le flooding, plus
précisément sur la fowarding zone. Une implémentation du
LBM peut exploiter n'importe quelle variante de la fowarding zone
sus-présentée. Le LBM réduis la zone de Fowarding et du
même coup diminue la charge réseau tout en maintenant une bonne
fiabilité par rapport au flooding simple. Le VDBG et le GeoGRID quant
à eux, ont pour but de réduire la charge du réseau tout en
augmentant la fiabilité du réseau par rapport au LBM. En effet,
la fowarding zone est désormais constituées des noeuds qui sont
proches de la région de destination (les régions de Voronoi qui
intersectent la région geocast).
48
CHAPITRE 4. PROTOCOLES DE GEOCASTING DANS LES RÉSEAUX DE
CAPTEURS SANS FIL
Ceci vient résoudre le problème des fowarding
zones qui n'ont pas de noeuds pouvant permettre l'acheminement des paquets vers
la zone de destination. Pour le GeoGrid, le réseau tout
entier est partitionné en grille. Ainsi, pour chaque grille contenue
dans la zone de fowarding est élu un noeud dit gateway responsable du
fowarding. La clé de cette technique est l'élection du gateway
qui a encore des zones d'ombre. Le GeoTORA et le Mesh-based Geocast
Protocol ont été introduits pour résoudre le
problème de redondance, de surcharge et de collisions multiples. Ils
permettent de créer en outre des routes entre la source et la
destination à la demande. Pour le transfert du paquet on évite
ainsi le flooding. Un avantage indéniable est la réduction
considérable de la surcharge du réseau lors de la transmission du
paquet. Le contre poids est la nécessité de plus de latence et
d'une éventuelle surcharge du réseau lors de la recherche des
routes.
4.3 Algorithme de géocasting avec garantie
de livraison
4.3.1 Algorithme de Seada et Helmy
Seada et al. en [44] présente 2 algorithmes : le
premier algorithme GFG (Geographic-Forwarding-Geocast) possède une
surcharge du réseau minimale et est idéal pour les réseaux
denses. Le second GFPG (Geographic-Forwarding Perimeter-Geocast) garantit la
livraison des paquets à tous les noeuds de la région geocast
lorsque le réseau est connecté et même si la densité
n'est pas grande ou la distribution des noeuds est irrégulière
avec des obstacles.
GFG (Geographic-Forwarding-Geocast)
Geographic-Forwarding-Geocast [45] commence comme un unicast
géométrique jusqu'à ce qu'il atteigne la région
geocast. Une fois à l'intérieur de la région, le message
est inondé. Les messages inondés qui atteignent des noeuds
extérieurs à la région geocast sont jetés. En
outre, comme l'a noté Casteigts et al. [46], le
Geographic-Forwarding-Geocast peut échouer lors de la délivrance
du message à tous les noeuds dans la région geocast si la
région est déconnectée et la seule connectivité est
à travers des noeuds externes. Dans les applications geocast, les noeuds
se doivent de pouvoir calculer ou de connaitre leurs coordonnées
géographiques. Le protocole GFG utilise donc cette information
géographique cruciale pour diffuser efficacement les paquets vers la
région geocast. Ce protocole combine le greedy
forwarding(routage qui consiste à envoyer un paquet uniquement aux
noeuds qui sont proches de la destination) et le face routing(routage
qui consiste à router les paquets autour des points de terminaison
jusqu'à trouver des noeuds proches de la destination); mais le face
routing n'est utilisé ici que si c'est nécessaire (i.e en
utilisant la greedy forwarding, on arrive à une situation où un
noeud ayant reçu le paquet n'arrive pas à trouver un noeud proche
de la destination). Dès que le paquet parvient aux noeuds à
l'intérieur de la région geocast, ceux-ci le diffusent à
tous leurs voisins et ainsi de
49
CHAPITRE 4. PROTOCOLES DE GEOCASTING DANS LES RÉSEAUX DE
CAPTEURS SANS FIL
suite. Le « Virtual Surrounding Face »
[47] évite ce problème en pré-calculant à l'avance
toutes les faces planes qui interceptent la région geocast.
GFPG
(Geographic-Forwarding-Perimeter-Geocast)
Cet algorithme utilise un savant dosage de routage
géographique et de face routing pour assurer la livraison des paquets
aux noeuds situés dans la région geocast lorsque le réseau
est connecté et en dépit des obstacles qui peuvent survenir
pendant ou après le déploiement. Initialement comme avec le GFG,
les noeuds qui sont à l'extérieur de la région se servent
de la greedy forwarding pour envoyer le paquet vers la région. Lorsque
le paquet finit par rentrer dans la région, les noeuds l'ayant
reçu démarrent le processus d'inondation de la région en
envoyant le paquet à tous leurs voisins. Tous les noeuds de la
région en font de même et en plus les noeuds en bordures de la
région initient un paquet de périmètre en direction de ses
voisins (ceux étant à l'extérieur de la région). En
effet, un noeud est dit noeud en bordure s'il possède un voisin à
l'extérieur de la région. Notons que les paquets de
périmètre sont envoyés uniquement aux voisins dans le
graphe planaire (et non à tous les noeuds). Recevant le paquet, le noeud
à l'extérieur de la région le diffuse à son voisin
dans le graphe planaire en utilisant la règle de la main droite, et
celui-ci fait de même, ainsi de suite. Le paquet sera ainsi relayé
le long de cette face et rentrera à nouveau dans la région. Le
premier noeud à recevoir le paquet dans la région va
démarrer le processus d'inondation si c'est la première fois
qu'il reçoit le paquet sinon il le détruit.
4.3.2 Algorithme de Bomgni et al.
Bomgni et al. propose en [48] un algorithme de géocast
et de multigeocast économe en énergie avec garantit de livraison
et avec une surcharge du réseau moindre que celle des protocoles
présentés plus haut. Son algorithme est une amélioration
de ceux présentés plus haut, et se déroule en 05 phases
:
Phase 1 : Identification des noeuds et Découverte
des voisins
Identification des noeuds : Soit n le
nombre de capteurs dans le réseau. Chaque capteur
-1
O(
)
n
tel
peut avoir un identifiant compris entre 1 et n3
avec une probabilité supérieure à e
que deux capteurs quelconques n'aient pas le même
identifiant. La preuve de ce théorème a été
démontrée dans [48].
Découverte des voisins : Une fois les
identifiants attribués, à chaque noeud doit découvrir son
voisinage à un saut. Quelque soit le noeud u du réseau,
le protocole de découverte ci-dessous(figure 4.2) lui permet de
connaitre ses voisins directs. N désigne la borne maximale du
degré de tous les noeuds et du le degré du noeud
quelconque u (notons que N < n).
CHAPITRE 4. PROTOCOLES DE GEOCASTING DANS LES RÉSEAUX DE
CAPTEURS SANS FIL
Phase 2 : partitionnement du réseau en
clique
Les capteurs exécutent le protocole de sun et al. [25]
pour former des cliques. On suppose que cette phase génère k
cliques et donc k CHs. On note CHcliquei le
clusterhead de la clique i. On rappelle qu'après cette
procédure tous les noeuds dans une même clique sont à un
saut l'un de l'autre. Ce qui permettra d'avoir un gain en énergie
énorme lors des transmissions comparées aux transmissions dans un
environnement partitionné où les noeuds d'un même cluster
peuvent être à plusieurs sauts les uns des autres.
Phase 3 : Partitionnement hiérarchique
On se focalise uniquement sur les CHs
générés à la phase 2. Considérons le
réseau G' engendré par ces k CHs. Il est clair
que G' = k. Partitionnons ce réseau en
utilisant la technique de partitionnement hiérarchique de Banerjee et
al. [27] présentée au chapitre précédent tel que
k
chaque cluster résultant de cette phase de partitionnement
ait au moins 2 capteurs et au plus
k capteurs. Il est facile de remarquer que ce
partitionnement engendrera un seul cluster et donc un seul clusterhead (le
super clusterhead). Ce dernier connait les identifiants de tous les
résidents du cluster dont il est le coordonnateur i.e les
identifiants des k - 1 capteurs.
Phase 4 : Phase de requête
Lorsque la source souhaite envoyer un paquet à tous les
noeuds situés dans une région géo-cast, elle diffuse dans
l'ensemble dominant un petit paquet constitué du message et de la
spécification de la région géocast comme suit
(REQUEST(Message, CoordonnéesRégionGéocast)).
Tout paquet de ce type est tout d'abord envoyé au superclusterhead qui
est la seule entité à pouvoir prendre une décision par
rapport au paquet. Ainsi, le paquet partira d'un clusterhead de niveau 1
jusqu'au superclusterhead.
Après avoir reçu le paquet, ce dernier va
envoyer un message de recherche contenant la définition de la
région géocast
(SEARCH(CoordonnéesRégionGéocast, f3)) à
tous les cluste-rheads des niveaux inférieurs pour savoir si ces
derniers ont des noeuds situés dans la région de geocast
spécifiée dans le paquet. Ce message est accompagné d'une
variable booléenne 3.

50
FIGURE 4.2: Protocole de découverte de
voisins
51
CHAPITRE 4. PROTOCOLES DE GEOCASTING DANS LES RÉSEAUX DE
CAPTEURS SANS FIL
Chaque clusterhead de premier niveau envoie le paquet de
recherche à tous les noeuds membres de son cluster. Ceux-ci
déterminent si oui ou non ils sont situés dans la région
geocast. Si c'est le cas, ils mettent la variable binaire 3 à 1
et renvoient la réponse avec leur identifiant à leur clusterhead.
Dans le cas contraire, aucune action n'est menée, cela signifie que ces
derniers ne sont pas dans la région geocast. Ces clusterheads
enregistrent la provenance des réponses positives.
Les clusterheads ayant reçu au moins une réponse
positive à leurs tours acheminent au superclusterhead un petit paquet
(SEARCH(CoordonnéesRégionGéocast, 3 = 1)) avec
3 mis à 1.
Phase 5 : Phase de diffusion
Après avoir reçu les réponses des
clusterheads de niveaux inférieurs, le superclusterhead renvoie un
paquet (REQUEST(Message, 3 = 1)) uniquement à ceux de ces
clusterheads qui ont répondu positivement au message de recherche. Le
message passera donc par tous les clusterheads qui ont enregistré 3
à 1 et parviendra finalement à tous les noeuds ayant mis
3 à 1 lors de la phase de recherche. les auteurs dans [48]
prouvent par la suite que cet algorithme garantit la livraison des paquets
à tous les noeuds situés dans la région géocast et
est économe en énergie. Une évaluation de la consommation
d'énergie y est également faite.
4.3.3 Protocole de Myoupo et al.
Le protocole présenté ici est une
amélioration de celui présenté en [48] et est
composé de deux grandes parties qui sont complémentaires et
permettent une économie globale d'énergie. Tout d'abord la
formation hiérarchique basée sur les cliques et un concept
d'architecture virtuelle permet de construire une base solide, rapide et
sécurisée pour l'acheminement de l'information. Ensuite, la
diffusion géocast elle-même est tout simplement réduite
à la phase de recherche dans le réseau qui est une étape
d'envoi des données. En plus de combiner l'aspect essentiel de la
sécurité, le protocole de Myoupo et al.[49] est économe en
énergie et permet de minimiser la surcharge de diffusion. Il se
déroule en 2 étapes : la formation sécurisée de la
structure et la mise en oeuvre du protocole sécurisé de
geocasting proprement dit.
Étape 1 : Formation sécurisée de la
structure
Cette formation se fait en 3 phases : initialisation,
Construction du 1er niveau de Cluster, Construction des
niveaux supérieurs. Soient Kn/u la chaine de clé
à sens unique de taille n + 1 générés par
le noeud u, MACK(M) un message d'authentification de 8 octets
généré au-dessus de M en utilisant la clef K
et H la fonction de hachage à sens unique utilisant
,iTESLA. Soient les hypothèses suivantes :
1. Le réseau est statique, connexe et toujours
connecté.
CHAPITRE 4. PROTOCOLES DE GEOCASTING DANS LES RÉSEAUX DE
CAPTEURS SANS FIL
2. La BS est la seule entité de confiance dans le
réseau qui a une forte capacité énergétique que les
autres noeuds, et dont la portée de transmission peut couvrir l'ensemble
du réseau.
3. Chaque noeud partage une clé secrète avec la
BS, qui est chargé avant le déploiement.
4. Chaque noeud connait ses voisins à 1 saut et a un
identifiant unique. Tous les messages échangés entre deux noeuds
sont authentifiés, grâce à la clé partagée
entre ces noeuds. Chaque noeud peut générer une clé
publique basée sur une signature. Les messages (diffusion) sont
authentifiés grâce à une combinaison de signatures et de
protocole de (aTESLA).
Les niveaux hiérarchiques sont formés en
utilisant le protocole de Barnejee et al.[27] : Au niveau initial, les noeuds
sont répartis en clusters dits "de niveau 1", et dans chacun de ces
clusters, un chef doit être élu (un CH1). Les
clusters de niveau 1 sont à leur tour divisé en clusters de "
niveau 2", et un chef serait élu pour chaque cluster (un
CH2 élu parmi les CH1s) et ainsi
de suite jusqu'au niveau N où la tête de cluster
CHN+1 de chaque cluster de niveau N est
élue parmi les CHNs.
Phase 1 : Initialisation
Cette phase se produit avant le déploiement du
réseau. La BS génère d'abord une chaine de clés
Kn/bs nécessaire pour effectuer des émissions à
tous les capteurs authentifiés. On charge alors chaque capteur u
avec un identifiant unique UDi, avec une clé
secrète Kbs, u (clé secrète partagée entre
la BS et le noeud u) partagé avec elle-même afin
d'assurer à l'avenir des communications unicast (pour garantir la
confidentialité et l'authentification), et la première clé
K0/bs de sa chaine de clé, afin de mener à bien les
diffusions /émissions sur l'ensemble du réseau. Enfin, la BS
charge chaque noeud u avec la clé cryptographique
établie avec tous ses voisins, pour des communications
sécurisées entre paire de voisin. Deux noeuds voisins u et v ont
une clé sécrète partagée Ku, v.
Phase 2 : Construction du
1er niveau de cluster
Cette seconde phase est donc d'abord l'application du
protocole de Sun et al.[25] en utilisant l'approche Cluster-First (CF)
sécurisé. Ce dernier utilise les touches Ku, V mis en
place entre deux noeuds u et v. on utilise également
la diffusion d'authentification avec (1aTESLA) : chaque noeud u
génère en utilisant son matériel cryptographique -
une chaine de clés Kn/u et distribue la première
clé de la chaine K0/u à ses voisins. Une fois les
clusters créés, les noeuds à l'intérieur de chacun
s'accordent sur un chef et procèdent à une élection : nous
obtenons un CH1 dans chaque cluster de niveau 1.
Enfin, chaque CH élu envoie un message à la BS contenant la liste
des membres de son cluster. Le BS ayant été informé par
les membres du réseau, elle est capable de lancer la phase suivante
quand elle reçoit tous les accusés de réception des CH.
52
Phase 3 (récursive) : Construction des Niveaux
Supérieurs
53
CHAPITRE 4. PROTOCOLES DE GEOCASTING DANS LES RÉSEAUX DE
CAPTEURS SANS FIL
La phase précédente a permis d'obtenir une base
réellement saine pour chaque cluster de niveau 1. Or, les auteurs
s'appuient sur un mécanisme d'architecture virtuelle
présenté en [26] pour partitionner le cluster de Niveau 1 aux
niveaux plus supérieures. C'est la BS - seule entité de confiance
dans le réseau - qui est en charge de cette opération. Dans un
premier temps, la BS connait le réseau, et détermine- en fonction
du nombre de noeuds et de la volonté de partitionnement fixé par
l'administrateur - un coefficient de gamme Cp (entre 0,
1 et 1, 1 représentant 100% de la distance séparant
la BS du capteur le plus éloigné dans le réseau - ce
paramètre peut être donnée par diffusion successive de la
BS au moment de l'initialisation) et un coefficient angulaire Ca
(entre 1° et 360°). La BS est donc capable de couper le
réseau en faisant diffuser sur différentes plages et angles,
selon Ca et Cp, comme le montre la
figure4.3. Chaque
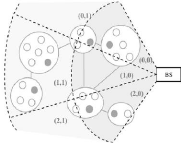
FIGURE 4.3: BS network cutting with Cp = 0.5 and
Ca = 40°. Here, we take the second level formation case. Broadcast step
zone définie par BS est indiqué par un couple
d'entier: (nombre angulaire, numéro corona). Le processus de
génération de cluster est alors le suivant pour chaque niveau N
(N > 1) :
- La BS effectue une diffusion à l'aide de la
clé Kn/bs afin de communiquer d'une manière
authentifiée le couple d'entier de tous les noeuds. Elle émet
ainsi successivement un message de type (angle, couronne) selon Ca
et Cp et ainsi à différents angles et couronnes.
Pour chaque zone (angle, corona) défini par la BS selon Ca et
Cp : BS- > WSN* : D,
MACKj/bs(D), Kj/bs avec Kj/bs la clé
actuelle de la chaine de clé Kn/bs, D le couple entier
à envoyer et correspondant à une certaine zone selon la BS.
Chaque noeud u reçoit alors le message. Il authentifie les
révélé des clés Kj/bs en utilisant la
clé Kj - 1/bs précédemment
mémorisée : pour cela il utilise la fonction irréversible
de hachage H qu'il détient, et vérifie la correspondance
Kj - 1/bs = H(Kj/bs). Une fois cette
première étape fait, les noeuds contrôlent
l'authentification fournie par MAC fixée au message et est en mesure de
mettre à niveau sa dernière clé connue. Enfin, un noeud
est informé du paramètre (angle, couronne) qui lui est
affecté. Chaque noeud w appartenant à CH1
communique à tous les membres de son cluster de niveau 1 le
paramètre qu'il détient, en utilisant la chaine clé
Kj/w de Kn/w pour l'authentification. L'objectif est de
mettre en accord tous les membres de chaque cluster de niveau 1 (en cas
où certains membres ont un réglage différent). w-
> W1 w : D, MACKj/w(D), Kj/w
54
CHAPITRE 4. PROTOCOLES DE GEOCASTING DANS LES RÉSEAUX DE
CAPTEURS SANS FIL
- Ils lisent ensuite le paramètre et améliorent
leur valeur locale s'il y a une différence avec la valeur diffusé
par BS, et retourne un accusé de réception contenant cette valeur
de fin à leur CH1, qui est authentifié avec
Ku, bs.
- Chaque CH1 reçoit ainsi un groupe
de réponses qu'il ne peut pas lire ou modifier. Une fois toutes les
réponses reçues, il les envoie tous à la BS, avec la
signature Kch, bs, en incluant l'IDu des membres
qui n'ont pas répondu.
- La BS reçoit un message, l'authentifie, puis
vérifie un par un tous les accusés de réceptions des
noeuds des clusters. Si une incohérence est remarquée, ou si elle
ne reçoit pas un message d'un CH, elle prend des mesures : la
réélection, bannissement des noeuds, ou autres.
- A ce moment, les clusters de niveau N sont
implicitement formés : un cluster de niveau N est un ensemble
de cluster de niveau N - 1, dont les membres ont les mêmes
paramètres (angle, corona) et sont directement liés.
- La poursuite de l'algorithme consiste alors à
l'élection d'un CHN+1 parmi tous les CHN
accessible entre eux sans changer le paramètre (angle,
couronne). Par conséquent, un CHN+1 est
également CHN, CHN_1, CHN_2,
CH1 ... . Le cluster est supposée être
formée. Le concept de cluster est un peu abstrait ici, car un noeud
appartenant à un groupe de niveau N(N > 1) ne
connait pas directement tous les autres membres, il n'a que des connaissances
de son CHN et les membres de son cluster de niveau 1.
- Une fois le choix fait, chaque nouvel élu CH informe
la BS qui commence à nouveau toute cette phase pour un niveau
supérieur, en multipliant Cp et Ca par un facteur
j à corriger. La formation de Cluster est terminée
lorsque la BS voit qu'il n'y a rien à gauche, mais un CH pour le niveau
N. La formation du Cluster est terminée et ne doit pas être
rediffusé. Toutefois, il est possible que les opérations
d'ajustement soient réalisées en interne, telles que les
opérations de mise à jour, la tolérance au faute, l'ajout
de noeuds, ou encore les mécanismes de relégation ou
réélection si un noeud malveillant est détecté. Par
la suite, les auteurs dans [49] mettent sur pied un mécanisme pour
assurer le bon entretien de la structure
Étape 2 : Protocole de geocasting
Ce protocole comporte deux phases. Ici, La BS possède
l'information à envoyer aux noeuds dans les régions
géocast. L'objectif de la première phase du protocole est la
découverte de ces noeuds. La seconde phase consiste en l'envoi
d'informations depuis la BS.
Phase 1 : Découverte de capteurs dans les
régions géocast
L'objectif pour la BS est de transmettre une donnée
D à une zone géographique B. Cette phase
consiste à la découverte des noeuds situés dans
B. Afin d'économiser de l'énergie et limiter le temps
d'exécution de cette phase, précisons que le temps est
divisé en Slot S0, S1, ...,
Sn. Cette étape se déroule comme suit : au slot
Si, la BS effectue tout d'abord une diffusion en utilisant
la clé Kn/bs afin de communiquer d'une façon
authentifié un petit paquet qui représente la zone
géographique B à l'ensemble des capteurs dans le
réseau : BS- > WSN* :
55
CHAPITRE 4. PROTOCOLES DE GEOCASTING DANS LES RÉSEAUX DE
CAPTEURS SANS FIL
B, MACKj/bs(B), Kj/bs Avec Kj/bs
la clé actuelle de la chaîne de clés Kn/bs,
et B la zone de recherche. Chaque noeud u reçoit alors
le message et contrôle son authenticité. Il est informé de
la zone B requise et alors est capable de savoir s'il est
située dans cette zone ou pas (Hypothèse (4)). Dans le cas
négatif, il ne fait rien. Dans le cas positif, il envoie un
accusé de réception à la BS, contenant B,
authentifié en utilisant la clé (Kbs, u) partagée
entre BS et le noeud u : u- > BS : B,
MACKbs,u(B), Kbs, u Notons que le routage de
u à BS se fait simplement en remontant la hiérarchie
déterminée par la structure. A la fin du slot
Sj, Si la BS a reçu des
accusés de réception, alors elle sait où envoyer les
données D à transmettre.
Phase 2 : envoi de la requête
Pour chaque capteur u ayant répondu à
la BS durant le temps de slot Sj, et
étant ainsi située dans B, la BS est capable d'envoyer
directement à ces capteurs les informations D, en
l'authentifiant et la protégeant avec la cléKbs, u et
pendant la tranche de temps slot
Sj+1. Une
limite de ce protocole est que les noeuds sont statique et le concept de
cluster est un peu abstrait ici, car un noeud appartenant à un groupe de
niveau N(N > 1) ne connait pas directement tous les autres membres,
il n'a que des connaissances de son CHN et
les membres de son cluster de niveau 1.
4.4 Conclusion
Dans ce chapitre, nous avons présenté les
différents protocoles de géocasting existants dans la
littérature; les uns garantissant la livraison des paquets et les autres
pas. A la lumière de ce qui précède, nous constatons que
ces protocoles s'appliquent sur des capteurs déployés sur une
surface plane, or l'espace de déploiement peut, présenter des
irrégularités. Par conséquent, il est nécessaire de
concevoir des protocoles prenant en compte ces irrégularités.
56
Chapitre 5
Notre contribution : Une approche de
protocole de géocasting sécurisé
dans
un RCSF déployé dans l'espace (en 3D)
Sommaire
5.1 Introduction 57
5.2 Notre approche de sécurité
57
5.2.1 Au pré-déploiement 59
5.2.2 Phase de Construction 59
5.2.3 Phase de reconstruction 60
5.2.4 Phase de renouvellement 60
5.2.5 Phase de révocation 60
5.2.6 Insertion des nouveaux noeuds 61
5.3 Étape 1 : Formation sécurisée
de la structure 61
5.3.1 Partitionnement sécurisé du réseau
en cluster 61
5.3.2 Identification des noeuds 62
5.3.3 Découverte de voisinage 62
5.3.4 Construction et Définition de notre arbre
couvrant le graphe 63
5.3.5 Routage sécurisé inter-cluster 63
5.3.6 Routage sécurisé intra-cluster 65
5.3.7 Élection du Cluster Head 65
5.4 Étape 2 : Protocole sécurisé
de géocasting 69
5.4.1 Geocasting avec plusieurs régions géocast
70
5.5 Analyse de la sécurité
71
5.6 Analyse de la consommation de l'énergie
71
5.7 Implémentation et Analyse des
résultats 72
57
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
|
5.7.1
|
Les métriques
|
73
|
|
5.7.2
|
Nombre et la taille des clés stockées
|
73
|
|
5.7.3
|
Nombre de paquets échangés
|
74
|
|
5.7.4
|
Consommation d'énergie
|
75
|
|
5.8
|
Conclusion
|
77
|
5.1 Introduction
Nous avons présenté dans le chapitre
précédent, quelques algorithmes de géocasting qui
garantissent la réception du message par les destinataires. Ils sont
particulièrement intéressant sur des surfaces planes et lorsque
la région géocast est relativement petite. Notons cependant que,
les capteurs sont caractérisés par une faible batterie et une
petite mémoire de stockage dû à leur taille; par
conséquent, le principal défi est de développer un
protocole de géocasting économe en énergie et garantissant
la réception du paquet à tous les noeuds de la région
géocast. L'un de ces protocoles est celui de MYOUPO et
al.[49] présenté au chapitre
précédent. L'hypothèse émise par Myoupo et al. est
que les capteurs sont déployés sur une surface plane. De plus,
son concept de cluster est un peu abstrait, car un noeud appartenant à
un cluster ne connait pas tous ses voisins. Nous allons donc utiliser ce
protocole et l'adapter en 3 dimensions(3-D) i.e dans l'espace. Dans ce
qui suit, Nous supposons les capteurs sont déployés dans l'espace
défini par une sphère de rayon R. R est le rayon de transmission
du noeud sink, qui est le seul élément du réseau capable
de communiquer directement avec n'importe quel capteur du réseau. La
figure 5.1 montre un réseau de capteur déployé dans
l'espace.

FIGURE 5.1: Réseau de capteurs
déployé dans l'espace
5.2 Notre approche de sécurité
L'approche adoptée est l'établissement d'une
clé secrète entre deux ou plusieurs noeuds. C'est l'un des
services de sécurité le plus important qui assure la
confidentialité et l'intégrité
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
des échanges. C'est une technique hybride à la
fois symétrique et asymétrique. On calcule des clés
publiques ECC en utilisant le principe du logarithme discret. Le
problème est exponentiel d'où la solution pour l'attaquant
devient impossible à calculer (le problème est NP-complet) et
l'algorithme devient intéressant pour la cryptographie. Les clés
publiques sont échangées par les entités communicantes du
réseau afin d'établir des clés symétriques [50]
[51].
Cette approche de sécurité permet
d'éviter entre autres les attaques telles que le Flooding
attack, l'attaque du trou noir, la réplication des données, le
sybil attack,le Jamming attack, l'écoute passive...
Dans cette partie, nous décrivons en détail les
étapes de notre approche de sécurité. Elle s'effectue sur
03 niveaux : avant le déploiement, pendant la construction de
notre topologie et pendant la phase de maintenance.
· Au pré-déploiement : la
BS pré-charge chaque capteur avec un identifiant unique et une
clé initiale K {n/bs};
· Au déploiement pendant la construction
de la topologie : tous les échanges sont
sécurisés par la clé K {n/bs} en utilisant des
fonctions de hachage à sens unique (non réversibles) et des codes
d'authentification MAC afin d'assurer l'intégrité, la
confidentialité et l'authentification;
· Après la phase de clustering, pendant la
maintenance : les noeuds communicants utilisent les clés
symétriques générées lors de la construction de la
topologie du réseau. Les clés symétriques sont
révoquées et renouvelées après chaque
détection de noeuds compromis. En effet, Le schéma de gestion de
clés [52] est déterministe et permet de sécuriser toutes
les étapes d'initialisation, de construction et de maintenance de
l'architecture du réseau en garantissant des communications
intra-cluster, inter-clusters, BS-CH, SB - Noeuds relais et CH - noeuds relais
sécurisées.
Hypothèses :
1. Le réseau est connexe et totalement dense.
2. Le réseau est tel que la BS est placé au centre
et les capteurs sont déployés aléatoirement autour de
lui;
3. La BS est la seule station en qui on puisse faire confiance et
qu'on ne peut pas compromettre;
4. Un attaquant peut opérer à n'importe quel niveau
de la topologie du réseau mais ne peut jamais compromettre la BS.
5. Aucune contrainte n'est imposée sur les
capacités en calcul, en stockage et en énergie de la station de
base.
58
Notations et terminologies
59
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
· IDa : Unique identifiant de 4 octets
du noeud U.
· A- > B : M : Message M diffusé par A
pour B
· WSN* : l'ensemble des capteurs du
réseau. .
· Kn/u : chaine de clé à sens unique
de taille n + 1 générés par le noeud u.
· Ku, v : une clé secrète
partagée entre les noeuds u et v.
· Kbs, u : une clé secrète
partagée entre la station de base et un noeud u.
· MACK(M) : un message d'authentification de 8
octets généré au-dessus de M en utilisant la clef K.
· H : une fonction de hachage à sens
unique (1aTESLA)
Les différents niveaux de sécurité
sont :
5.2.1 Au pré-déploiement
La station de base génère d'abord une
chaîne de clés K {n/bs} nécessaire pour effectuer
des émissions à tous les capteurs authentifiés afin de
former notre structure. Elle charge ensuite chaque capteur u avec un
seul identifiant Ida, avec une clé secrète
Kbs, u partagé avec elle-même, afin d'assurer à
l'avenir des communications unicast (pour garantir la confidentialité et
l'authentification), et la première clé K {0/bs} de sa
chaîne de la clé, afin de méner à bien les
diffusions/émissions sur l'ensemble du réseau (nous utiliserons
,iTESLA pour garantir l'authentification). Enfin, la BS charge chaque
noeud u avec l'établissement des clé matériel
cryptographique établi avec tous ses voisins, pour sécuriser les
communications entre paires de voisins. Deux noeuds voisins u et v
partage une clé Ku, v
5.2.2 Phase de Construction
La phase de construction est celle pendant laquelle
l'algorithme de clustering s'effectue. Pendant cette phase, les échanges
sont sécurisées par la clé K {n/bs}, car c'est la
BS - seule entité de confiance dans le réseau - qui est en charge
de cette opération.
· La BS effectue une diffusion successive à
l'aide de la clé K {n/bs} afin de communiquer d'une
manière authentifiée des informations à tous les noeuds,
selon différents angles et rayons. BS- > WSN* : D,
MACK(M)(D), K {j/bs} avec K {j/bs} la clé actuelle de la
chaîne clé K {n/bs} et D le triplet d'entier
à transmettre et correspondant à une certaine zone.
· Chaque noeud u reçoit alors le message
et l'authentifie en utilisant la fonction de hachage irréversible H
qu'il détient, et vérifie la correspondance K {j - 1/bs}
= H(K {j/bs}). Une fois cette première étape
terminée, le noeud vérifie l'authentification fournie par MAC
jointe au message et est capable de mettre à jour sa dernière
clé connue. Ceci est une simple application du protocole
,iTESLA.
60
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
· Après la formation des clusters vient la phase
de découverte de voisinage et d'élection des CHs. Celle-ci est
sécurisée à l'aide de la clé Ku, v
partagée entre 2 noeuds u et v.
· A la fin de cette étape, tous les noeuds CH
auront établis trois types de clés : une clé
partagée avec la BS (Kch, bs) , une clé partagée
avec chacun des noeuds du cluster (Kch, u) et une clé commune
partagée avec tous les noeuds du cluster(K {n/ch}). Les noeuds
membres établissent deux types de clés : une clé
partagée avec le CH (Ku, ch) et une clé commune
partagée avec tous les noeuds du cluster.
5.2.3 Phase de reconstruction
La reconstruction de la topologie du réseau se fait
à chaque fois que le niveau en ressources énergétiques
d'un noeud CH atteint un niveau beaucoup plus inférieur aux
autres niveaux des autres noeuds du réseau. Cette constatation sera
faite par la BS qui diffuse un message de reconstruction du cluster ayant pour
chef le noeud à remplacer et l'identité du nouveau noeud CH
du cluster. Ce dernier envoi un message en broadcast à tous les
noeuds membres du cluster pour les informer de ce changement en leur notifiant
l'identité du nouveau chef et en supprimant les clés
partagées avec l'ancien CH et lancent des messages
d'établissement et d'échange de clés avec le nouveau
CH.
5.2.4 Phase de renouvellement
Cette mesure vise à renforcer la sécurité
du
réseau. la BS diffuse un message
de renouvellement de clés. Ce message sera relayé par tous les
noeuds CH. Chaque CH lance la procédure de renouvellement de clés
avec ses noeuds membres du cluster. Durant la procédure de
renouvellement, chaque CH calcule PY = gY mod
p et le transmet à tous ses noeuds membres et chaque noeud
membre calcule son Px = gx mod p
et le transmet au CH. Les deux parties génèrent une
clé de session en calculant
(PY)x du coté des noeuds membres
et (Px) du coté du CH (p est un grand nombre et g un
point). Notons qu'avant le déploiement, la SB calcule toutes les
clés publiques et les paramètres de génération des
clés symétriques, et les charge dans chaque capteur [4].
5.2.5 Phase de révocation
La phase de révocation se déclenche à
chaque compromission d'un noeud du réseau. Si le noeud compromis est un
noeud membre d'un cluster, son CH supprime de sa mémoire la clé
partagé avec lui, le place en quarantaine, ignore ses messages et le
signale à la station de base pour ne jamais le désigner CH lors
des phases de reconstruction du réseau. Si le noeud compromis est un CH,
la station de base supprime la clé partagée avec lui,
désigne un autre CH parmi les membres du cluster du CH compromis qui se
charge d'informer et d'avertir tous les noeuds membres du cluster.
Aussitôt informés, ils procèdent à la suppression
des clés partagées avec
61
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
le CH compromis, ignorent ses messages, le mettent en
quarantaine et mettent à jour l'identité du nouveau CH.
5.2.6 Insertion des nouveaux noeuds
La BS pré-charge un nouveau noeud avec les valeurs
(Id, k {n/bs}) et diffuse un message à tous les noeuds CH
comportant l'identité du nouveau noeud à insérer.
Après le déploiement, le nouveau noeud diffuse un message
d'appartenance à un cluster et le noeud CH le plus proche du nouveau
noeud vérifie son identité avec les identités des nouveaux
noeuds à ajouter sur le réseau. Si l'identité du noeud est
vérifiée, le noeud CH établit une clé de session
avec lui.
Après avoir décris comment sera gérer la
sécurité dans notre protocole, nous décrivons à
présent dans les sections suivantes les détails du
déroulement de notre approche de protocole de géocasting. Il se
déroule en 2 étapes : formation sécurisée de la
structure et protocole sécurisé de géocasting proprement
dite.
5.3 Étape 1 : Formation
sécurisée de la structure
5.3.1 Partitionnement sécurisé du
réseau en cluster
Cette étape est initiée par la station de base
qui, via des communications sécurisées, va partitionner le
réseau en plusieurs clusters en utilisant le protocole de
partitionnement en 3D présenté à la section 2.4.4.
Formation des couronnes : les capteurs
enregistrent le numéro de leur couronne. La sécurité ici,
est gérée à l'aide de la clé K {n/bs}. Et
comme mentionnée à la section 2.4.4, la réception d'un
message par un capteur est codée par 0 et la non-réception du
message après un délai r est codée par la valeur
1.
Formation des sections horizontales : les
capteurs enregistrent le numéro de leur section horizontale. De
même, les communications seront sécurisées à l'aide
de la clé K {n/bs} tout en respectant le principe
proposé à la section 2.4.4.
Formation des sections verticales : les
capteurs enregistrent le numéro de leur section verticale. Comme
précédemment, les communications sont sécurisées
à l'aide de la clé K {n/bs}.
Les clusters sont donc obtenus après la formation des
couronnes, des sections horizontales et des sections verticales. Ainsi, un
cluster est constitué des capteurs ayant les mêmes
coordonnées géographiques et est noté cluster (i, j,
k) où i,j et k sont les numéro de
la couronne, section horizontale et verticale respectivement.
62
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
5.3.2 Identification des noeuds
Soit n le nombre de capteurs dans le réseau.
Chaque capteur peut avoir un identifiant compris entre 1 et n3
avec une probabilité supérieure à
eO(-1/n))[48]
tel que deux capteurs quelconques n'aient pas le même identifiant.
5.3.3 Découverte de voisinage
Après la formation des clusters, il est question ici de
montrer comment chaque noeud découvre ses voisins du cluster . Cette
phase de découverte est initiée par le noeud sink et se
déroule en 2 étapes : l'attribution des canaux de communication
aux différents clusters et la découverte des voisins proprement
dite.
Attribution du canal de communication aux
clusters
Le sink attribue les canaux de communications aux
différents clusters en se rassurant que deux clusters voisins
n'utilisent pas le même canal. En effet, deux clusters sont voisins s'ils
ont une arête commune. Pour respecter ce principe,le noeud sink applique
l'algorithme de coloration de graphe qui consiste à assigner une couleur
à chaque sommet d'un graphe de sorte que deux sommet adjacents ont des
couleurs différentes tout en minimisant le nombre de couleurs
utilisées. En considérant un cluster comme un sommet et une
couleur comme un canal dans notre cas, il revient à assigner un canal
à chaque cluster de sorte que deux clusters adjacents ont des canaux
différents. La notion d'adjacence dans ce cas étant
renvoyée à celle de voisinage entre 2 clusters , car 2 clusters
sont dits adjacents s'ils ont une arête en commun ou si la distance les
séparant est inférieure à la distance D de
réutilisation de canal. On démontre facilement
s,/
que D = R 3N [53]. R étant le rayon
du cluster et N sa taille (i.e le nombre de cellule qu'il
contient) A la fin de cette étape, les stations sauront dans quel canal
effectuer la diffusion en vue de découvrir leurs voisins dans le
cluster. Ainsi, lorsque la clique j sera en possession du canal
i, ses stations utiliseront le mécanisme CSMA/CA pour effectuer
des diffusions.
Diffusion
Après avoir pris connaissance du canal où ils
transmettront leur message, les noeuds peuvent alors commencer la diffusion en
utilisant le mécanisme CSMA/CA. Chaque message envoyé est
constitué de l'identifiant de la station émettrice du message.
Lorsque un noeud fait une diffusion pour la 1ère
fois, il écoute le réseau. A la
réception du précédent message, chaque noeud enregistre
l'identifiant contenu dans le message. Ainsi, à la fin des
différentes diffusions, Toutes les stations auront enregistré les
identifiants de tous leurs voisins.
63
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
5.3.4 Construction et Définition de notre arbre
couvrant le graphe
Comme le montre la figure 5.2, notre réseau a plusieurs
niveaux. Afin de permettre l'information d'arriver chez le noeud Sink, il est
nécessaire de mettre sur pied des protocoles de routage.
L'idée est la suivante : l'information
est routée dans son propre secteur angulaire (intersection entre une
section horizontale et une section verticale) à travers un chemin
virtuel reliant le noeud Sink au secteur le plus éloigné de
celui-ci. La collection de tous ces chemins virtuels (un par secteur angulaire)
définit un arbre dont la racine est le noeud sink. Quelques
propriétés de cet arbre sont les suivantes :
· Le noeud sink a autant de fils que de secteur
angulaire.
· Il existe une communication directe en un saut entre le
noeud sink et ses clusters voisins
· Le nombre de fils d'un cluster est au plus 1.
· Chaque noeud interne (sauf le noeud racine qui est le
noeud sink) a exactement un fils; ce qui permet d'éviter plusieurs
disputes lors de l'envoi des données. La figure 9 décrit la
structure de notre arbre
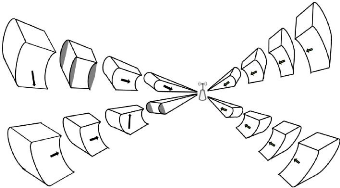
FIGURE 5.2: petit aperçu de la
structure de notre arbre
5.3.5 Routage sécurisé inter-cluster
Nous supposons qu'après le partitionnement, le
réseau est totalement dense, i.e qu'il existe au moins un
capteur dans chaque cluster. Ainsi, les capteurs d'un cluster de
coordonnées (i,j, k) peuvent directement communiquer avec ceux
du cluster de coordonnées (i - 1, j, k). Or nous
savons que les capteurs des clusters de coordonnées (1, j, k)
peuvent directement communiquer avec le noeud sink de coordonnées
(-1, -1, -1), qui est en fait la
destination finale des paquets qui transitent dans le réseau. De
façon successive donc, les données peuvent être
acheminées du cluster de coordonnées (i,j, k) aux
clusters de coordonnées (i - 1,j, k), (i - 2,j,
k), ..., (1,j, k).
64
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
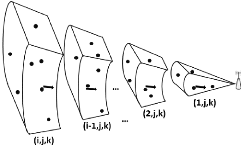
FIGURE 5.3: Routage dans un réseau
dense
Les capteurs des clusters de coordonnées (1, j, k)
pourront alors à leur tour envoyer ces données au noeud
sink. Afin d'économiser de l'énergie, les capteurs ne sont pas
tout le temps éveillés; ils peuvent automatiquement passer en
mode veille pendant un certain temps et passer en mode
éveillé pendant une période bien définie en
exécutant le protocole d'accès au canal de Nakano et al. [54].
Pendant que les capteurs sont éveillés, il y a deux actions
possibles :
Un événement se produit : les
capteurs du cluster de coordonnées (i, j, k) construisent un
message contenant le code de l'événement et leurs
coordonnées, et les envoient à en direction du cluster (i
- 1, j, k) ou directement au noeud sink si leur cluster est de
coordonnées (1, j, k).
Réception d'un message : le capteur
du cluster (i, j, k) vérifie s'il en est le destinataire; si
c'est le cas, il l'achemine tout simplement au cluster (i-1, j, k)
ou au noeud sink si son cluster est de coordonnées (1, j,
k). Si ce n'est pas le cas, il l'ignore tout simplement. La figure 5.3
montre comment les données sont routées entre les clusters. En
réalité la notion de cluster est virtuelle, ce sont les capteurs
qui détectent les événements, envoient et reçoivent
les messages. Comme les capteurs ont une source d'énergie
limitée, il faut les empêcher de diffuser anarchiquement et
inutilement les données.
Principe de l'algorithme de réservation du
canal de Nakano et al. Étant donné que les noeuds ont
déjà découvert leur voisinages, Pour pallier aux
problèmes de collisions et de retransmission des paquets qui influent
sur la durée de vie des capteurs dans un réseau, la technique de
réservation de canal de Nakano et al.[54] est utilisée.
L'idée de base de cette méthode est qu'un capteur n'est
éveillé que s'il émet ou reçoit des paquets. Soit
un réseau de capteurs sans fil disposant de p capteurs C(1), C(2),
C(3), ..., C(p - 1), C(p). Supposons que pour tout i,
tel que 1 < i < p, chaque capteur C(i) possède ni
paquets à transmettre. Au début de l'algorithme, seul le
capteur C(i) connait ni. Au premier intervalle de temps, le capteur
C(1) transmet le nombre de paquets n1 qu'il dispose. Pendant ce
même intervalle, tous les autres capteurs sont endormis à
l'exception du capteur C(1) qui transmet et du capteur C(2)
qui reçoit n1. C(2) calcule ensuite n1
+ n2 et transmet le résultat à C(3). Durant cet
intervalle de temps
65
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
tous les autres capteurs sont endormis excepté
C(2) qui émet et C(3) qui reçoit. De la
même manière, lorsque C(3) reçoit
n1 +n2 , il calcule
n1 +n2 +n3
et envoi le résultat au capteur C(4). Ce processus est
réitéré p-1 fois et à la fin, le capteur
C(p) calcul
n1+n2+n3+...+np_2+np_1.
De manière précise, un capteur C(i) calcule
n1 + n2 +
n3 + ... + ni_2
+ ni_1 et il se
réveille au tempsn1 + n2
+ n3 + ... +
ni_2 +
ni_1 + 1 pour commencer
à transmettre les informations qu'il dispose. Dès que sa
transmission est terminée, il se rendort. A la fin de cet algorithme,
chaque capteur est à mesure de déterminer de manière
exacte le nombre de slots qu'il utilisera pour transmettre les capteurs qui le
précède. Ce protocole de réservation de canal se termine
en p-1 intervalles de temps et aucun capteur n'est
éveillé pendant plus de deux intervalles de temps.
5.3.6 Routage sécurisé intra-cluster
Une fois que le routage inter-cluster est défini, il
faut encore spécifier comment les données sont
gérées au sein d'un même cluster afin d'éviter la
surcharge du réseau. Pour ce faire, nous utilisons la notion de CH
qui sera pour un cluster donné l'unique noeud chargé
d'acheminer les données vers le cluster relais 1. Les
données sont collectées aux membres d'un cluster par un CH et
acheminer à un autre cluster ou au noeud sink. Ainsi une phase de
détermination du CH est nécessaire.
5.3.7 Élection du Cluster Head
Les CHs auront pour rôle d'acheminer les données
d'un cluster vers un autre cluster qui, à son tour, les acheminera vers
le noeud sink. Cette élection est initiée par le noeud sink qui
diffuse dans tout l'espace de déploiement des capteurs, un message
authentifié à l'aide de la clé K {n/bs},
indiquant la date de début pour que les capteurs soient
synchronisés entre eux, mais le noeud sink n'intervient pas lors de
l'élection proprement dite. Précisons que lors du processus
d'élection du CH, tous les noeuds exécutent l'algorithme de
réservation du canal de Nakano et al. [54] afin d'éviter les
interférences/collisions lors des communications.
La gestion du routage dans un cluster fait que le CH
dépense plus d'énergie qu'un noeud ordinaire. De ce fait, il
serait judicieux d'octroyer le rôle de CH aux noeuds qui disposent assez
d'énergie (supérieure à un seuil donné que nous
notons Es) [22]. L'énergie résiduelle est
propre à chaque noeud et est notée Er(u).
supposons qu'un un noeud est capable d'évaluer son énergie
résiduelle Er(u); elle n'a pas d'impact lors de la
première exécution de l'algorithme de partitionnement, puisque
à ce stade, les noeuds disposent tous de la même quantité
d'énergie. Pour élire un CH, les capteurs du cluster (i, j,
k) (i > 1) qui ont une énergie résiduelle
supérieure au seuil Es, envoient un message
Hello en direction du cluster (i-1,j, k) et attendent un
accusé de réception. Ensuite, tous les capteurs ayant reçu
des accusés de réception (Hi) se proposent comme CH, en
diffusant le message Head en direction de leur propre cluster. Le
capteur ayant la plus grande énergie résiduelle
Er(u) parmi ceux qui se sont proposés comme CH est
élu. S'il y
1. Cluster par lequel transite les données d'un autre
cluster pour atteindre le noeud sink.
66
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
a plusieurs noeuds candidats qui ont la même
énergie résiduelle, le noeud qui est élu est celui qui a
le plus grand identifiant. En ce qui concerne les capteurs des clusters (1,
j, k), ils n'envoient pas de message Hello, mais répondent
aux messages Hello envoyés par les capteurs des clusters
(2, j, k). Ensuite, ceux qui ont une énergie résiduelle
supérieure au seuil E8 envoient un message Head
en direction de leur propre cluster, et les critères
d'élection sont les mêmes pour tous les capteurs. Ainsi, quand les
noeuds du même cluster veulent transmettre des paquets, ils les
acheminent d'abord vers le CH qui se chargera de les transmettre au cluster
suivant (que nous désignons cluster relais). Un capteur qui
reçoit des paquets qui ont pour destinataire sa grappe les achemine vers
le CH. Si les données reçues ne sont pas destinées
à son cluster, il les ignore tout simplement. Quand le CH atteint le
seuil de niveau de batterie E8, il relance le processus
d'élection d'un nouveau CH, mais il ne se présente plus. Notons
que cet élection se fait de façon parallèle et les
communications sont sécurisées à l'aide de la clé
commune partagée avec tous les noeuds du cluster. La procédure
5.3.1 permet d'initialiser le processus d'élection par
Algorithme 5.3.1: Procédure
init()
Entrees: Er,
E8
Sorties: : Le message Hello 1
Debut
2
|
Si (Er > E8)
Alors
|
3
|
|
Si (i > 1)
Alors
|
4
|
|
|
Hello +- msg(ID, (i,j, k), (i - 1,j, k))
;
|
5
|
|
|
radio.transmit(Hello) ;
|
6
|
|
Sinon
|
7
|
|
|
deja_recu +- vrai ;
|
8
|
|
Finsi
|
9
|
Finsi
|
|
10 Fin
la diffusion du message Hello. La procédure
5.3.2 décrit le comportement des capteurs lors de la réception du
message Hello et la procédure 5.3.3 quant à elle
décrit l'action à faire lors de la réception d'un message
Hi. Enfin, la procédure 5.3.4 est l'élection proprement
dite du CH après réception du message Head.
· La variable globale deja_recu permet
de s'assurer qu'un capteur réagit une seule fois à la
réception des messages Hi;
· La variable globale Cluster_Head
permet de garder l'identité du CH;
· La variable cluster_relais permet de
garder l'identité du cluster relais.
L'algorithme 5.3.5 fait appel aux procédures
5.3.1,5.3.2, 5.3.3 et 5.3.4 pour donner la démarche complète de
l'élection du CH. Il se subdivise en deux phases : une première
dans laquelle les capteurs qui ont une énergie résiduelle
supérieure au seuil minimum E8 s'assurent qu'ils
peuvent communiquer avec le cluster relais (procédures 5.3.1, 5.3.2 et
5.3.3) et une seconde phase qui consiste en l'élection proprement dite
(via la procédure 5.3.4).
2
3
4
5
6
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
Algorithme 5.3.2: Après la
réception d'un message Hello : reception_Hello()
Entrees : Le message Hello
Sorties: : Le message Hi 1
Debut
Si (desti(Hello) == vrai)
Alors
ID1 +- Hello.ID ;
Hi +- msg(ID, ID1, (i,j, k), (i +
1,j, k)) ;
radio.transmit(Hi) ;
Finsi
7 Fin
Algorithme 5.3.3: Après la
réception d'un message Hi : reception_Hi()
Entrees: Le message Hi
Sorties: : Les coordonnées du cluster
relais. 1 Debut
2
3
4
5
6
Si (desti(Hi) == vrai)
Alors
deja_recu +- vrai;
cluster_relais +- (i - 1,j, k)
;
Cluster_Head +- (ID, Er)
; Finsi

2
3
4
5
6
7
8
9
10
11
12
13
14
15
7 Fin
Algorithme 5.3.4: Après la
réception d'un message Head: reception_Head()
Entrees: Le message Head
Sorties: : L'identifiant du Clustr Head
1 Debut
Si (desti(Head) == vrai)
Alors
Si (deja_recu == faux)
Alors
Cluster_Head +- (Head.ID,
Head.Er) ;
deja_recu +- vrai ;
Sinon
Si (Head.Er >
Cluster_Head.Er) Alors
Cluster_Head +- (Head.ID,
Head.Er) ;
Sinon
Si (Head.Er ==
Cluster_Head.Er) et (Head.ID >
Cluster_Head.ID) Alors
Cluster_Head +- (Head.ID,
Head.Er) ;
Finsi
Finsi
Finsi
Finsi
16 Fin
67
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
Puisqu'un capteur peut recevoir (et/ou envoyer) les messages
Hello, Hi et Head plusieurs fois, il peut aussi
exécuter les procédures correspondantes plusieurs fois. Puisque
nous avons comme seule hypothèse le fait que le réseau est dense,
nous ne pouvons pas prédire le nombre de capteurs dans les
différents clusters. Ainsi, le nombre d'appels des procédures
5.3.1, 5.3.2,5.3.3 et 5.3.4 n'est pas prévisible. D'où, il sera
à la charge de l'utilisateur final de paramétrer la durée
de chacune des phases de l'algorithme 5.3.5. Néanmoins, la durée
de chaque phase doit permettre que chacune des procédures 5.3.2,5.3.3 et
5.3.4 puisse se réaliser plusieurs fois.
Remarque 1. Les temps T1 et T2
de chacune des phases de l'algorithme 5.3.5 doivent être
déterminées en fonction du nombre de slots
nécéssaires à l'exécution de chacune des
procédures 5.3.1,5.3.2, 5.3.3 et 5.3.4 et du nombre maximal de capteurs
dans un cluster.
Algorithme 5.3.5: Election_CH
Entrees : Les durées T1 et
T2.
Sorties: : L'identifiant du Cluster Head.
1 Debut

2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
deja_recu +- faux;
step1 +- time() + T1 ;
init() ;
Tantque (time() step1)
Faire
Si (Hello +- radio.receive()) ==
vrai) Alors
reception_Hello() ; Finsi
Si (Hi +- radio.receive()) == vrai)
et (deja_recu == faux) et
(Hi.ID1 == ID) Alors
reception_Hi() ; Finsi
Fintantque
step2 +- time() + T2 ;
Si (deja_recu == vrai)
Alors
Head +- msg(ID, Er, (i,j, k));
radio.transmit(Head) ;
Finsi
Tantque (time() step2)
Faire
Si (Head +- radio.receive()) ==
vrai) Alors
reception_Head() ; Finsi
Fintantque
68
23 Fin
Chacune des procédures 5.3.1, 5.3.2, 5.3.3 et 5.3.4 se
déroule en temps constant. Si nous désignons par C le
nombre total de capteurs, alors, la plus mauvaise répartition des
capteurs dans l'espace d'intérêt est la suivante : (l x
m x n - 1) clusters contiennent exactement un seul
capteur chacun et le dernier cluster en contient tout le reste,
c'est-à-dire (C - l x m x n -
1).
69
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
Ainsi, le nombre de capteurs contenu dans un cluster est
compris entre 1 et C - l x in x n
- 1. Ceci nous permet d'énoncer le théorème
2.
Theoreme 2. Dans le pire des cas, l'algorithme
5.3.5 nécessite O(C) temps d'exécution.
Preuve. Les capteurs
exécutent la procédure init() une seule fois, donc
O(1) temps d'exécution. Dans la première boucle tantque
de l'algorithme 5.3.5 (ligne 5), les procédures 5.3.2 et 5.3.3
sexécutent au plus (C - l x in x n -
1) fois chacune. Donc cette boucle nécessite 2 x
O(C) = O(C) temps d'exécution. De même, la
deuxième boucle tantque de l'algorithme 5.3.5 (ligne 18), fait au plus
(C -lxinxn-1) appels de la
procédure 5.3.4, donc sa complexité est temporelle est
donnée par O(C). On peut conclûre de tout ceci que la
complexité temporelle de l'algorithme 5.3.5 est en O(C).
C'est-à-dire que son temps dexécution est fonction du nombre
total de capteurs dans le pire des cas.
Remarque 2. Dans notre travail, nous
supposons que tous les capteurs des clusters (1, j, k) peuvent
directement communiquer avec le noeud sink. Dans le cas contraire, les capteurs
des clusters (1, j, k), candidats pour devenir CH, devraient s'assurer
de leur connexion directe avec le sink avant d'envoyer le message
Head. Et dans ce cas, le noeud sink devra participer au processus en
tant que seul capteur du cluster (-1, -1,
-1).
5.4 Étape 2 : Protocole sécurisé
de géocasting
Le protocole de geocasting comporte deux phases. Ici, la BS
possède l'information à envoyer aux noeuds situés dans la
région géocast. L'objectif de la première phase de notre
protocole est la découverte de ces noeuds. La seconde phase consiste en
l'envoi d'informations depuis la BS. Considérons les hypothèses
suivantes :
1. Le réseau est statique, connexe et toujours
connecté;
2. La BS est la seule entité de confiance dans le
réseau qui a une forte capacité énergétique que les
autres noeuds, et dont la portée de transmission peut couvrir l'ensemble
du réseau;
3. Chaque noeud partage une clé secrète avec la
BS, qui est chargé avant le déploiement;
4. Chaque capteur est capable de se localiser dans l'espace
en utilisant soit le GPS, soit la triangulation ou un système de
positionnement pour un réseau ad hoc;
5. Les messages (diffusion) sont authentifiés
grâce à une combinaison de signatures et de protocole de
(1aTESLA). Les horloges des noeuds sont synchronisés, comme
(1aTESLA) l'exige.
Phase 1 : Découverte de capteurs dans la
région géocast
L'objectif pour la BS est de transmettre une donnée
D à une zone géographique B. Cette phase
consiste à la découverte des noeuds situés dans
B.
70
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
Afin d'économiser de l'énergie et limiter le
temps d'exécution de cette phase, précisons que le temps est
divisé en slot S0,
S1, ..., Sn. Si la source
souhaite envoyer un paquet à tous les noeuds situés dans une
région géocast, alors au slot Si, elle
diffuse en direction de la BS ( seule entité à pouvoir prendre
une décision par rapport au paquet) un paquet B,
constitué du message et des spécifications de la région
géocast. B = (REQUEST(Message,
CoordomméesRegiomGéocast))
- Après avoir reçu le paquet B =
(REQUEST(Message, CoordommeesRégiomGéocast, )), la BS va
envoyer un message M de recherche contenant la définition de la
région géocast à tous les clusterheads afin de savoir si
ces derniers ont des noeuds situés dans la région géocast
spécifiée dans le paquet. Ce message est accompagné d'une
variable binaire 3 et authentifié à l'aide de la
clé K {m/bs}. M =
SEARCH(CoordomméesRégiomGéocast, 3, K {m/bs}).
BS- > WSN* : M,
MACK{n/bs}(M), K {j/bs}
avec K {j/bs} la clé actuelle de la chaine de clés
K {m/bs}.
- Les clusterheads à leur tour, envoie le paquet de
recherche à tous les noeuds membres de leur cluster en utilisant la
clé Kch, u. Chaque noeud u reçoit alors le
message et contrôle son authenticité. Il est informé de la
zone B requise et alors est capable de savoir s'il est situé
dans cette zone ou pas (Hypothèse (4)). Dans le cas négatif, il
ne fait rien. Dans le cas positif, il met la variable binaire 3
à1, puis envoie un accusé de réception à son
CH, contenant B, authentifié en utilisant la clé
(Kch, u) partagée entre CH et le noeud. u- > CH : B,
MACKch,u(B), Kch, u.
- Les CHs ayant reçu au moins une réponse
positive, à leurs tours acheminent à la BS un paquet
(SEARCH(CoordommeesRégiomGéocast, kbs, ch, 3 = 1)) avec
3 mis à 1. A la fin du slot Si, Si la BS a
reçu des accusés de réception, alors elle sait où
envoyer les données D à transmettre.
Phase 2 : Phase de diffusion
Pour chaque capteur u ayant répondu à
la BS durant le temps slot Si, et étant ainsi
située dans B, la BS est capable d'envoyer à ces
capteurs en passant par leur clusterhead, les informations D, en
l'authentifiant et la protégeant avec la clé Kbs, ch et
pendant la tranche de temps slot
Si+1.
5.4.1 Geocasting avec plusieurs régions
géocast
Sur la base du protocole décrit
précédemment, qui fournit seulement une information à une
seule zone, il est possible d'effectuer des recherches parallèles pour
plusieurs zones, en remplaçant la zone B par une
concaténation des différents zones : »b1, b2, ...,
bm».
Theoreme 3. L'algorithme de regroupement
géocast multi-niveaux ci-dessus garantit la livraison à tous les
noeuds dans la région geocast
Preuve. Supposons qu'il y ait au
moins un noeud dans la région géocast qui ne soit pas atteinte.
Alors ce noeud a été déconnecté du réseau
qui n'est plus connecté. Il n'est donc pas un réseau de
capteur.
71
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
5.5 Analyse de la sécurité
Nous étudions ici plus en détail l'aspect
sécuritaire de notre protocole. Le déroulement de la
sécurité pour le protocole de formation a été
expliqué plus haut et semble clair pour nous; nous passons directement
sur le protocole de géocasting, décrit dans la section 5.4. En ce
qui concerne la première phase de recherche de la région
géocast,au cours de sa première étape, le protocole
,iTESLA est utilisé, ce qui permet une transmission depuis la
BS authentifié. Chaque noeud recevant l'information est donc certain que
c'est un élément d'information provenant de la BS, entité
de confiance du réseau, et il n'y a d'erreur à ce sujet. A la fin
de sa deuxième étape, les noeuds CH qui veulent envoyer
un accusé de réception à la BS utilise la clé
Kbs, ch. L'authenticité de l'ensemble étant
assurée, il est impossible pour un noeud j situé entre
u et la BS de modifier le contenu des paquets. De la
même manière, si un tel noeud ne souhaite pas transmettre
l'information qui lui est transmise, le noeud u est capable de
détecter l'erreur après un certain temps, car il a
été informé qu'il recevra un message dans la Phase 2.
À la troisième étape, la BS est une entité
de confiance : il n'y a pas risque d'attaque. La deuxième phase consiste
à envoyer des informations à un noeud u situé
dans B : la BS utilise la clé Kbs, ch
pour chiffrer et authentifier D à transmettre. Notre
protocole garantit que s'il y a une tentative de modifier, supprimer ou changer
le chemin d'une donnée, c'est détectable par la BS. La
majorité des attaques externes sont ainsi évités, et les
compromettants des noeuds CH sont également
détectable.
5.6 Analyse de la consommation de l'énergie
Le modèle utilisé dans ce travail est similaire
à celui qui a été adopté par plusieurs
contributions efficientes à l'instar de[55].
E = ET + ER = Nx(et
+ eampdn) + Nxer
Où ET et ER sont les énergies
totales utilisées respectivement pour les transmissions dans le
réseau et les réceptions. Les énergies dissipées
par l'émetteur, l'amplificateur et le récepteur radio sont
respectivement exprimées par et, eamp et
er ; d est la distance entre les noeuds et
n est le paramètre d'atténuation d'énergie (2
< n < 4). A partir de ce modèle, une
pseudo évaluation peut être faite dans les différentes
phases de ce protocole :
Réduction de la consommation de
l'énergie durant la phase de partitionnement : la consommation
d'énergie peut être étudié sous différents
niveaux. d'une part, dans un cluster, chaque élément est à
un saut de l'autre. Ceci contribue à gaspiller moins d'énergie
lors des transmissions intra-cluster. De plus n'importe quel noeud peut
prétendre au poste de cluste-rhead si son niveau de batterie lui permet.
D'autre part, c'est la station de base qui prend en charge la plupart des
actions nécessaire pour la formation des clusters, qui assure la plus
faible consommation d'énergie sur l'ensemble du réseau, tout en
offrant une certaine sécurité.
72
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
Logiquement, la BS est une entité ayant plus
d'énergie que d'autres capteurs.
Réduction de la consommation de
l'énergie pendant la phase de diffusion intra-cluster :
l'étude de la consommation d'énergie correspondant à notre
structure étant fait, il nous reste à étudier le protocole
de geocasting, qui se compose de 3 étapes principales. Tout d'abord une
diffusion faite par la BS sur l'ensemble du réseau se fait en demandant
à tous d'indiquer s'il est dans la région géocast ou non.
Ensuite, suit une transmission possible d'un accusé de réception
à plusieurs sauts d'un ou plusieurs CH vers la BS. Finalement, l'envoi
d'information à plusieurs niveaux de la BS à ces CH est
effectué pendant que les capteurs qui ne sont pas concernés sont
endormis. L'énergie utilisée est donc vraiment minimisé.
Enfin, notons que le geocasting est effectuée en utilisant des tranches
de temps (slot), qui peut être utilisé comme slot de capteurs
d'éveil. Certainement, pour un geocasting dans une zone B
impliquant seulement un seul capteur, la consommation d'énergie
d'un noeud est au moins er et au maximum 2x(et +
eampxdn) + 3Xer.
5.7 Implémentation et Analyse des
résultats
Dans cette sous section, nous présentons les
résultats des simulations de notre algorithme de partitionnement pour
montrer l'influence de l'heuristique mise en oeuvre pour le choix du
clusterhead et de la solution de sécurité. Ces simulations ont
été exécutées sur un laptop (Core i2-950B CPU@
2.10Ghz x2, 4GO de RAM, Ubuntu 12.04 LTS ) en utilisant le logiciel WSNet [56]
et sont basés sur la zone sphérique de 9km de
diamètre, sur lequel nous générons au hasard des
réseaux connectés de 500 et 1000 capteurs. Le simulateur NS-2 a
été utilisé pour le modèle
énergétique et les courbes ont été
réalisées grâce à l'outil Gnuplut version 4.3.
Nous avons comparé notre solution de
sécurité et de gestion de clés à une solution
combinant les approches probabilistes et dites t-secure (dont les principaux
inconvénients sont l'absence d'authentification entre chaque paire de
noeuds et le problème d'espace mémoire réservé aux
clés stockées). Les problèmes du nombre et de la taille
des paquets de données échangés durant les phases de
déroulement du protocole (découverte de voisinage, installation
des clés, renouvellement des clés et insertion des nouveaux
noeuds) ainsi que le problème de la consommation d'énergie par
les noeuds capteurs sont deux concepts majeurs déterminant la
durée de vie d'un réseau de capteurs sans fil (RcSF). C'est pour
cette raison que la plupart des solutions proposées essayent davantage
de réduire le nombre de messages émis et reçus et la
quantité d'énergie consommée dans les opérations
cryptographiques durant tout le cycle de vie du réseau. Dans la
littérature, l'idée de combiner le modèle probabiliste
avec les schémas dits t-secure est illustrée par le protocole
TinyKeyMan [57]. En adoptant les deux modèles, TinyKeyMan souffre de
quelques inconvénients : A chaque construction ou reconstruction de
routes pour une installation ou une mise à jour des clés, le
nombre de paquets échangés entre les noeuds accroit
73
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
rapidement avec la taille du réseau et la
probabilité que deux noeuds partagent un même secret ou trouvent
un voisins commun pour établir une clé symétrique devient
de plus en plus faible. Par conséquent, on peut dire que ces deux
approches combinées n'offrent pas de compromis entre la taille du
réseau et le nombre de messages échangés. Dans ce
contexte, nous avons présenté une nouvelle solution
déterministe qui assure une probabilité complète (100%)
d'établir une clé symétrique entre chaque paire de noeuds
sans le partage d'aucune information. Ce gain de messages transmis et
reçus est synonyme d'une consommation réduite de
l'énergie. Les opérations de calcul de secrets et de clés
sont également optimisées pour une consommation raisonnable de
ressources physiques et énergétiques des noeuds capteurs. Dans ce
qui suit, nous allons présenter les métriques et
paramètres utilisés, la librairie TinyKeyMan, et les
résultats obtenus par rapport à ces métriques et en
fonction du nombre de noeuds du réseau.
5.7.1 Les métriques
Pour l'évaluation des performances de notre solution,
nous nous basons sur les métriques suivantes :
· Le nombre de clés stockées dans la
mémoire des noeuds capteurs.
· La taille des clés stockées dans la
mémoire des noeuds capteurs.
· Le nombre de paquets de données
échangés durant les différentes phases de
déroulement du protocole : initialisation (découverte du
voisinage), installation des clés symétriques, révocation
des clés découvertes par les noeuds intrus, renouvellement des
clés et insertion des nouveaux noeuds.
· La consommation d'énergie moyenne par tous les
noeuds du réseau en fonction de la taille du réseau.
· La consommation d'énergie par composant :
énergie consommée durant les opérations de calcul des
clés et l'énergie consommée pour l'émission /
réception des paquets de données. Le nombre de clés
stockées dans la mémoire des noeuds est obtenu par
l'exécution de notre protocole de sécurité et de gestion
de clés sur le protocole LEACH [58], considéré comme la
référence des protocoles hiérarchiques et qui convient
mieux aux besoins en simulation de notre solution.
La taille des clés ECC présentes dans la
mémoire des noeuds capteurs et utilisées par notre protocole de
sécurité et de gestion de clés est calculée sur la
base des données présentées sur le tableau 5.1 :
5.7.2 Nombre et la taille des clés
stockées
Dans le tableau 5.2, nous avons calculé le nombre et la
taille des clés stockées par un noeud Cluster Head (CH) et par un
noeud normal membre d'un cluster dans une topologie hiérarchique. Dans
cette topologie, chaque noeud CH partage trois types de clés : i) une
clé partagée avec son noeud parent dans la hiérarchie, ii)
une clé partagée avec chacun des noeuds de son cluster et iii)
74
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
|
Taille du nombre premier P
|
160 bits
|
|
Taille du secret x
|
< 160 bits
|
|
Taille d'un point Px
|
320 bits
|
|
Taille d'une clé publique
|
320 bits
|
|
Taille d'une clé privée
|
160 bits
|
TABLE 5.1: Taille des clés ECC et de leurs
paramètres de calcul
une clé commune partagée avec tous les noeuds de
son cluster. Un noeud membre d'un cluster partage deux types de clés :
i) une clé personnelle avec son CH et ii) une clé commune avec
son CH et tous les autres noeuds du cluster. On note que tous les noeuds du
réseau partagent entre eux à la phase d'initialisation une
clé commune qui sert à authentifier et sécuriser toutes
les communications durant la phase d'installation des clés par paires.
Cette clé n'est pas prise en compte car elle sera supprimée
à la fin de la phase d'initialisation et d'installation des clés.
La taille des clés est calculée selon les informations
données par le tableau 5.2 ci-dessus. Le tableau 5.2 donne le nombre et
la taille des clés stockées par chaque noeud du réseau
où Nc est le nombre moyen de noeuds d'un cluster.
|
Type du noeud
|
Nombre de clés stockées
|
Taille des clés stockées
|
|
Noeud CH
|
(Nc + 2)
|
20 (Nc + 2) octets
|
|
Noeud membre
|
2
|
40 octets
|
TABLE 5.2: Le nombre et la taille des clés
stockées dans notre méthode
5.7.3 Nombre de paquets échangés
Les figures 5.4 et 5.5 présentent le nombre de paquets
de données échangés lors de l'installation des clés
sur des réseaux de taille variant de 100 à 1000 noeuds capteurs
en présence ou non de noeuds attaquants. Les messages
échangés concernent ceux des opérations
d'authentification, de découverte de voisinage et de calcul des
clés secrètes. Les deux figures ci-dessus résument les
résultats obtenus après avoir réalisé
différentes expériences. Sur la figure 21 où on suppose
l'absence de noeuds attaquants, la complexité en communication de notre
protocole est meilleure.
Dans la figure 5.5 où on suppose la présence de
10% de noeuds attaquants de l'ensemble des noeuds du réseau, le nombre
d'informations échangées par radio est beaucoup plus important
(environ une différence de 500% de paquets) et cela est dû
à la diffusion d'un grand nombre de fausses informations de
contrôle. Chaque noeud du réseau essaye alors d'authentifier
l'émetteur puis d'ignorer ses futurs messages dans le cas d'une
intrusion. Dans le protocole TinyKeyMan, les informations produites par les
noeuds malicieux comportent une forte probabilité de partage d'un
même polynôme ce qui touche à un plus grand nombre de
noeuds. Notre solution échange
75
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
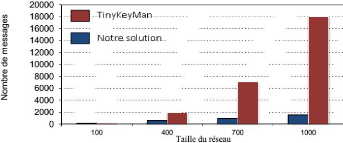
FIGURE 5.4: Nombre de paquets échangés en absence
d'intrus
moins de paquets pour installer les clés ce qui garantie
un temps d'installation plus court et un
niveau de sécurité
plus élevé. Sur la figure 5.4 où on suppose l'absence de
noeuds attaquants,
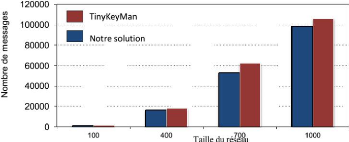
FIGURE 5.5: Nombre de paquets échangés en
présence d'intrus
la complexité en communication de notre protocole est
meilleure notamment pour des réseaux denses comme les RCSF et sont
négligeables pour les réseaux de petite taille. Notre solution
échange moins de paquets, environ 10 fois moins que la solution
probabiliste du protocole TinyKeyMan.
5.7.4 Consommation d'énergie
Tenant compte du modèle énergétique que
nous utilisons et de l'analyse de la consommation de cette dernière,
nous remarquons que c'est le cluster-head qui dépense le plus
d'énergie, car c'est lui qui fait plus de transmissions de paquets dans
son cluster. Ceci est illustré par la courbe de la figure 5.6 où
nous pouvons observer que l'énergie du cluster-head décroit plus
rapidement que celle d'un noeud ordinaire. Nous avons utilisé les
moyennes des dépenses énergétiques des cluster-head et des
capteurs ordinaires pour réaliser cette courbe. Nous supposons que
chaque noeud dispose de 100 unités d'énergie. L'émission
et la réception d'un paquet d'information coûtent chacune une
unité d'énergie. On suppose aussi que lorsqu'un capteur est
éveillé, il
76
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
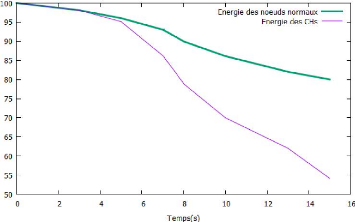
FIGURE 5.6: Évolution de l'énergie des
capteurs
dépense un dixième de son énergie. Les
courbes de la figure 5.7 illustre les différents scénario de
l'évolution de l'énergie des capteurs lors du déroulement
de deux protocoles de géocasting dans les RCSFs à multiples sauts
à savoir le protocole présenté dans les travaux de Myoupo
et al. [49] et notre protocole.
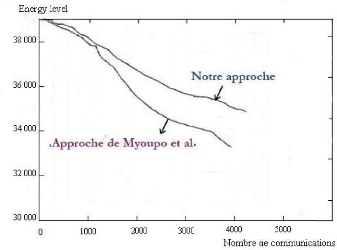
FIGURE 5.7: Évolution de l'énergie lors du
déroulement de deux protocoles avec 400 capteurs
On remarque que l'approche que nous avons utilisé en 3D
et dans laquelle chaque capteur découvre ses voisins du même
cluster consomme moins d'énergie que l'approche présentée
en
77
CHAPITRE 5. NOTRE CONTRIBUTION : UNE APPROCHE DE PROTOCOLE DE
GÉOCASTING SÉCURISÉ DANS UN RCSF DÉPLOYÉ
DANS L'ESPACE (EN 3D)
[49] dans laquelle la notion de cluster est un peu abstraite et
statique. .
5.8 Conclusion
La solution présentée dans cet article est notre
approche sécurisé pour la résolution du problème de
géocasting dans un RCSF déployé dans l'espace. La
structure virtuelle sur laquelle notre protocole est basé permet une
utilisation répartie du réseau, et particulièrement
l'utilisation efficace, pour un contrôle toujours assurée par la
BS. La solution de sécurité est une fonction de gestion de
clés basée sur la cryptographie sur les courbes elliptiques (ECC)
pour générer des clés symétriques et
résoudre le problème d'échange de clés entre les
noeuds capteurs du réseau après leur déploiement. Elle
évite la majorité des attaques. En plus de combiner l'aspect
essentiel de la sécurité, notre protocole est rapide et
économe en énergie; elle présente une connectivité
totale, une génération réduite du nombre et de la taille
des paquets échangés ainsi qu'une consommation minimisée
d'énergie comparativement aux autres méthodes.
78
Chapitre 6
Conclusion Générale
Sommaire
6.1 Bilan 78
6.2 Perspectives 79
6.1 Bilan
L'essor des technologies sans fil a rendu possible
aujourd'hui, la manipulation de l'information à travers des dispositifs
qui ont des caractéristiques particulières et qui se mettent en
réseau via une interface de communication sans fil. Les réseaux
de capteurs sans fil peuvent être identifiés comme l'une des
technologies clefs de l'avenir en raison de l'incroyable potentiel applicatif
qu'elle renferme. Mais à cause de la jeunesse de cette technologie, le
domaine de RCSF soulève encore d'importantes problématiques comme
la gestion de l'énergie, la gestion de la sécurité et la
prise en compte d'un espace de déploiement présentant des
irrégularités. Pour ce fait, Il était question pour nous
dans ce mémoire, de concevoir un protocole efficace et
sécurisé pour la gestion du routage géographique dans un
RCSF déployé dans l'espace. Pour atteindre notre objectif, nous
avons commencé par présenter les enjeux, les
caractéristiques et quelques domaines d'application des RCSFs. Puis,
après avoir passé en revue de littérature quelques
protocoles de sécurité et de partitionnement des RCSFs, nous
avons étudié quelques protocoles de géocasting existants
dans la littérature à l'instar du protocole de Seada et al., de
Stojmenovic, de A.B. Bomgni et al. et enfin de Myoupo et al.. Ceci nous a
permis de prendre connaissance de ce qui a déjà été
fait dans notre domaine d'étude et d'y apporter notre contribution. Pour
cela, nous nous sommes basés sur une des limite du protocole
présenté dans les travaux de Myoupo et al. [49] qui suppose ses
capteurs déployés sur une surface plane et sur un concept de
cluster un peu abstrait.
Nous avons pu mettre sur pied un protocole qui est en
même temps économe en énergie et sécurisé,
par lequel chaque capteur apprend ses coordonnées et découvre ses
voisins. Par la suite, nous avons montré comment le routage des
données pouvait facilement être mis sur pied grâce
79
CONCLUSION GENERALE
à notre architecture virtuelle bien formé. La
solution de sécurité est une fonction de gestion de clés
basée sur la cryptographie permettant de générer des
clés symétriques afin de résoudre le problème
d'échange de clés entre les noeuds capteurs du réseau
après leur déploiement. Cette solution garantit un niveau de
sécurité élevé en utilisant des clés de
petites tailles.
La solution proposée dans ce mémoire est une
approche de service sécurisé permettant d'effectuer de
manière simple et rapide le geocasting dans un RCSF. La structure
virtuelle sur laquelle notre protocole est basé permet une utilisation
répartie du réseau, et particulièrement l'utilisation
efficace, pour un contrôle toujours assurée par la BS.
6.2 Perspectives
Malgré les résultats assez encourageants que
nous laissent observer nos simulations, plusieurs problèmes restent tout
de même ouverts. Une ouverture à explorer serait de produire un
algorithme tolérant aux fautes pour le problème de
géocasting en dimension 3, ce qui garantirait que les stations normales
recevront en temps fini les paquets qui leurs seront destinés; une autre
perspective à long terme serait de créer un environnement de
sécurité pour la résolution de ce problème en
prenant en compte le fait que la station de base ne soit pas au centre du
réseau et qu'elle ne peut non plus atteindre tous les noeuds. Il serait
également intéressant d'étudier le problème en
incluant certains noeuds mobiles dans le réseau.
80
Bibliographie
[1] Idrissa Sow. Partitionnement et Géocasting
dans les Réseaux Mobiles Ad Hoc et Collecte de données dans les
Réseaux de Capteurs Sans fil. Phd thesis, Université de
PIRCARDIE JULES VERNES, Juin 2009.
[2] Malick GAYE. Etat de l'art sur les réseaux de
capteurs sans fil. Technical report, Université Cheikh Anta DIOP de
DAKAR, 2014.
[3] Alex Landry FOUTHE WEMBE. Un nouveau protocole de routage
par permutation dans les réseaux mobiles de capteurs sans fil a multiple
sauts economes en energie. Master's thesis, Université de Dschang,
January 2014.
[4] RAMDANI MOHAMED. ProblÈmes de
sÉcuritÉ dans les rÉseaux de capteurs avec prise en charge
de l'Énergie. MÉmoire de magister, UNIVERSITÉ DE SAAD
DAHLAB DE BLIDA, Novembre 2013.
[5] E. Cayirci. I.F. Akyildiz, W.S. Sankarasubramaniam.
Wireless Sensor Network A survey on sensor networks. PhD thesis, IEEE
Communications Magazine, Vol. 38, 40 (8), 8 Août 2002.
[6] Malick GAYE. Ab initio molecular dynamics for
liquid metals. Technical report, Université Cheikh Anta DIOP de Dakar,
Juin 2014.
[7] K.BOUCHAKOUR. Routage Hiérarchique sur les
réseaux de capteurs sans fils protocole khlch(k-hop layered clustering
hierarchy). Mémoire de magister, Ecole Nationale superieure de
l'informatique, Republique algérienne, April 2012.
[8] H Woesner I. Chlamtac, I. Carreras. From internets to
bionets :biological kinetic service oriented networks. The case study of
Bionetic Sensor networks. CREATE-NET Research Consortium, Trento, Italy,
2005.
[9] S. Tariq. Mac algorithms in wireless networks. Master's
thesis, Umea University, Sweden,
www.cs.umu.se/education/examina/Rapporter/ShoaibTariq.pdf,
December 2005.
[10] Karl H. and Willig A. Protocols and architectures for
wireless sensor networks. John Wiley and Sons, Ltd, 2005.
[11] K. D.Wong. Physical layer considerationsfor wireless
sensor networks. The 2004 IEEE International Conference on Networking,
Sensing 8. Control Taipei. Taiwan, pages 2 :1201- 1206, March 2004.
81
BIBLIOGRAPHIE
[12] B.P. Mohapatra. K.B.Kredo. Medium access control in
wireless sensor networks. Computer network 51(4), pages 961-994,
2007.
[13] K. Langendoen and G. Halkes. Embedded systems handbook,
chapter 34 : Energy-effcient medium access control. CRC press, http //
www.st.ewi.tudelft.nl/koen/papers/MAC
- chapter.pdf, 2005.
[14] Kamal Beydoun. Conception d'un protocole de routage
hiérarchique pour les réseaux de capteurs. Phd thesis,
Université de Franche-Comté, France Novembre 2009.
[15] D. Song H. Chan, A. Perrig. Random key predistribution
schemes for sensor networks. In IEEE Symposium on Security and Privacy,
Berkeley, California, pages 197-213, May 2003.
[16] Y. S. Han S. Chen P . K. Varshney W. Du, J. Deng. A key
management scheme for wireless sensor networks using deployment knowledge.
In Proceedings of IEEE INFOCOM'04, Hong Kong : IEEE Press, pages
586-597, 2004.
[17] D.C Andrews, P. Johnson. Remote continuous monitoring in
the home. telemedicine and telecare. Mémoire de master of sciences en
informatique, school, Mars 2006. pp. 107-113.
[18] A. N. Badache D. Djenouri, L. Khelladi. A survey of
security issues in mobile ad hoc and sensor networks, communications surveys
tutorials. IEEE 7, No. 4, 2005.
[19] D.C. Petriu D. Makrakis V.Z. Groza. E.M. Petriu, N.D.
Georganas. Sensor-based information appliances. IEEE Instrumentation
Measurement Magazine. Vol. 3 (4), pages pp. 31-35, December 2000.
[20] Yaser Youssef. Routage pour la gestion de
l'énergie dans les réseaux de capteurs sans fil. PhD thesis,
Université de Hautes ALsaces, France Juillet 2010.
[21] Badreddine Guizani. Algorithme de
clustérisation et de routage dans les réseaux Ad hoc. PhD
thesis, Université de Technologie de Belfort-Montbéliard,
2012.
[22] KENFACK ZEUKENG Ulrich. Clusterisation et routage dans
les réseaux ad hoc de capteurs sans fil. Master's thesis,
Université de Dschang, 2016.
[23] J.T.C. Tsaï M. Gerla. Multicluster, mobile,
multimedia radio network,. Wireless Networks 1(3), pages 255-265,
1995.
[24] Stefano Basagni. Distributed clustering for ad hoc
networks. In Parallel Architectures, Algorithms, and Networks
1999.(I-SPAN'99) Proceedings. Fourth InternationalSymposium on, page
310-315, 1999.
[25] K.Sun P.Peng et P.Ning. Secure distributed cluster
formation in wireless sensor networks. 22nd annual computer security
application conference, page 131-140, Decembre 2006.
[26] L. Wilson M. Eltoweissy K. Jones A. Wadaa, S. Olariu.
Training a wireless sensor network,. Mobile Networks and Applications
3, pages 151-168, 2005.
82
BIBLIOGRAPHIE
[27] Suman Banerjee et Samir Khuller. A clustering scheme for
hierarchical control in multihop wireless networks. Proceedings of the 20th
IEEE International Conference on Computer Communications,, page 1028-1037,
Decembre 2001.
[28] K. BEYDOUN. Conception d'un protocole de routage pour
les réseaux de capteurs. PhD thesis, L'U.F.R des sciences et
Techniques de l'Université de FRANCHE-COMTE, 2009.
[29] Gilles Brassard et Paul Bratley. Algorithmique conception
et analyse. Masson, 1987.
[30] Catégorie :Attaque réseau, http ://
fr.wikipedia.org/wiki/Catégorie
:Attaqueréseau.
[31] G. Kresse and J. Furthmüller. Wassin znaidi. quelques
propositions de solutions pour la sécurité des réseaux de
capteurs sans fil.phd thesi. Institut national des sciences
appliquées de Lyon, 10 octobre 2010.
[32] J.P. Babau. W. Znaidi, M. Minier. An ontology for
attacks in wireless sensor networks. Research Report RR-6704, INRIA,
2008.
[33] H. Guyennet D. Martins. Etat de l'art.
sécurité dans les réseaux de capteurs sans fil.
Manuscrit auteur, publié dans SAR-SSI 2008 : 3rd conference on
security of network architect, 2008.
[34] Amar. Bensaber Boucif. Introduction à la
sécurité dans les réseaux de capteurs sans fil.
[35] D. Wagner C. Karlof. Secure routing in wireless sensor
networks : Attacks and countermeasures. Elsevier's AdHoc Networks Journal,
Special Issue on Sensor Network Applications and Protocols., pages
293-315., 2008.
[36] D.B. Johnson Y.C. Hu, A. Perrig. Rushing attacks and
defense in wireless ad hoc network routing protocols. Proceedings of the
2003 ACM workshop on Wireless security (New York, NY, USA), ACM Press.,
page 30-40, 2003.
[37] Mehdi DIOURI Mohammed. Réseaux de capteurs
sans fils : routage et sécurité. PhD thesis, 2010.
[38] MARTINS David. Sécurité dans les
réseaux de capteurs sans fils Stéganographie et réseau de
confiance. PhD thesis, U.F.R. des sciences et techniques de
l'université de France-Comté, Novembre 2010.
[39] K. Schosek S. Chellappan D. Xuan X. Wang, W. Gu. Sensor
network configuration under physical attacks. In Xicheng Lu andWei Zhao,
editors, ICCNMC.ol. 3619 of Lecture Notes in Computer Science, page
23-32., 2005.
[40] V. D. Gligor. B. Parno, A. Perrig. Distributed detection
of node replication attacks in sensor networks. page 49-63., 2005.
[41] S. Mishra J. Deng, R. Han. Countermeasures against
traffic analysis attacks in wireless sensor networks. In SECURECOMM '05 :
Proceedings of the First International Conference on Security and Privacy for
Emerging Areas in Communications Networks, page 113-126, 2005.
[42] Minier Marine. Quelques problèmes de
sécurité dans les réseaux de capteurs. Laboratoire
CITI, 2007.
83
BIBLIOGRAPHIE
[43] N. Vaidya Y. Ko. Flooding-based geocasting protocols for
mobile ad hoc networks. Mobile Networks and Applications (MONET),, 7
:471-480, 2002.
[44] A. Helmy K. Seada. Efficient geocasting with perfect
delivery in wireless networks. WNNC, IEEE, 2004.
[45] Karim Seada and Ahmed Helmy. Efficient and robust
geocasting protocols for sensor networks. Computer Communications,,
29(2)(number) :151-161, 2006.
[46] Amiya Nayak Arnaud Casteigts and Ivan Stojmenovic.
Multicasting, geocasting, and anycasting in sensor and actuator networks.
Wireless Sensor and Actuator Networks,, page 127, 2010.
[47] Yunhao Liu Jie Lian, Kshirasagar Naik and Lei Chen.
Virtual surrounding face geocasting with guaranteed message delivery for ad hoc
and sensor networks. In Network Protocols, 2006. ICNP'06. Proceedings of
the 2006 14th IEEE International Conference, pages 198-207, 2006.
[48] Alain Bertrand Bomgni. Qualité de services
dans les protocoles de multicast géographique et de routage par
permutation dans les réseaux de capteurs sans fil. PhD thesis,
Université de Picardie Jules Verne, 28 Mars 2013.
[49] Sébastien Faye and Jean Frédéric
Myoupo. Secure and energy-efficient geocast protocols for wireless sensor
networks based on a hierarchical clustered structure. International Journal
of Network Security,, 15(No.1) :121-130, Jan 2013.
[50] Ismail MANSOUR. Contribution à la
sécurité des communications des réseaux de capteurs sans
fil. PhD thesis, UNIVERSITÉ BLAISE PASCAL - CLERMONT II, 5 juillet
2013.
[51] H. Chan et A. Perrig. Pike: peer intermediaries for key
establishment in sensor networks. In in Proceedings IEEE INFOCOM,
volume vol. 1, p. 524 535 vol. 1. 4th Annual Joint Conference of the IEEE
Computer and Communications Societies, 2005.
[52] M. Benmohammed M. Ramdani. Un nouveau schéma de
gestion de clés basé sur les ecc pour les réseaux de
capteurs sans fil. 2013.
[53] Reseaux et Télécommunication
Réseaux GSM. 5e Edition Revuet et augmentée.
[54] K.Nakano S.Olariu A.Y.Zomaya. Energy-efficient
permutation routing in radio networks. IEEE transactions on parallel and
distributed systems,, page 544-577, Juin 2001.
[55] S. Kaplan D. Wei and H. A. Chan. Energy efficient
clustering algorithms for wireless sensor networks. Proceedings of IEEE
Conference on Communications, Beijing, pages 236-240, 2008.
[56] Wsnet, http ://
wsnet.gforge.inria.fr/index.html,
visité le 19 Mars 2016.
[57] P. Ning. D. Liu. Establishing pairwise keys in
distributed sensor networks. In Proceedings of the 10th ACM Conference on
Computer and Communications Security (CCS03), 2003.
[58] A. Chandrakasan W. Heinzelman and H. Balakrishnan.
Energy efficient communication protocols for wireless microsensor networks. In
in Proceedings of the 33rd Hawaiian International Conference on Systems
Science, pages 3005-3014, January 2000.
| 

