|
OCTOBRE 2021
ECOLE SUPERIEURE D'INFORMATIQUE SALAMA
République Démocratique du Congo
Province du haut-Katanga
Lubumbashi
www.esisalama.org

ETUDE ET MISE EN PLACE D'UN SYSTEME TEMPS REEL
DE
SURVEILLANCE DE L'ETAT DE SANTE ET DE LOCALISATION DES
ANIMAUX
«Cas de la Ferme Espoir-Lubumbashi
»
Travail présenté et défendu en vue de
l'obtention du diplôme d'Ingénieur technicien en informatique dans
la filière de réseaux et télécommunications
Par ADIDAS MBARUSHIMANA Daniel
Option : Réseaux et
télécommunications
ECOLE SUPERIEURE D'INFORMATIQUE SALAMA
République Démocratique du Congo
Province du haut-Katanga
Lubumbashi
www.esisalama.org

ETUDE ET MISE EN PLACE D'UN SYSTEME TEMPS REEL
DE
SURVEILLANCE DE L'ETAT DE SANTE ET DE LOCALISATION DES
ANIMAUX
«Cas de la Ferme Espoir-Lubumbashi
»
Travail présenté et défendu en vue de
l'obtention du diplôme d'Ingénieur technicien en informatique dans
la filière de réseaux et télécommunications
Par ADIDAS MBARUSHIMANA Daniel
Option : Réseaux et
télécommunications Directeur : Mr. Papy
MUKANDA
Co-directeur : Mr. Jean-Marc
TSHIVUADI
OCTOBRE 2021
Page | I
EPIGRAPHE
« Les espèces qui survivent ne sont pas les
espèces les plus fortes, ni les plus intelligentes, mais celles qui
s'adaptent le mieux aux changements.»
Charles DARWIN.
Page | II
IN MEMORIAM
A mes très chers parents Papa MBARUSHIMANA Alphonse
Kashama et Maman KABUO Ngolo Esperance, vos yeux sont aujourd'hui incapables de
lire ces quelques pages rédigées par votre garçons et vos
oreilles sourdes sont incapables d'entendre mon cri de joie à la fin de
mes études de cycle de graduat, alors que ce qui serait à
l'honneur car je suis le fruit de votre amour infini.
Vous nous avez quittés très tôt pour le
sommeil éternel au moment que vous n'avez pas encore goutté le
fruit de vos efforts engagé pendant cette ligue scientifique.
Vous nous manquerez à jamais dans notre vie car vous
êtes toujours gravé au fond de nos coeurs : sincère,
gratitude à vous.
Que vos âmes reposent en paix.
Page | III
DEDICACE
Je dédie ce travail à ma famille, elle qui m'a
doté d'une éducation digne, son amour a fait de moi ce que je
suis aujourd'hui :
Particulièrement à mon très cher et aimable
oncle paternel BUTSHIKE Raphael et son épouse UMUHIRE Rebecca pour le
conseil et le soutien apporté durant ma vie estudiantine constituent
pour moi une valeur inestimable.
A toi ma tante Goreth NSENGA et son époux Robert MANDE
NSENGA ceci est ma profonde gratitude pour votre éternel amour, que ce
travail soit le meilleur cadeau que je puisse vous offrir.
A tous mes frères et soeurs qui m'avez toujours soutenu et
encouragé durant ces années d'études.
Page | IV
REMERCIEMENT
La réalisation de ce travail n'est pas l'expression des
efforts et connaissances personnels mais le fruit de l'aide de Dieu et de
plusieurs personnes.
De prime abord, Je remercie le Dieu tout puissant,
créateur du ciel et de la terre, maitre de temps et de circonstances
pour l'intelligence et pour le souffle de vie et le courage qu'il ne cesse de
renouveler en nous.
Nos remerciement s'adressent aussi aux personnes suivantes par
leur dévouement et leur soutient dans la concrétisation de ce
travail :
? Mr. Papy MUKANDA pour ses conseils bien
éclairés, sa patience, sa discipline ainsi que pour la confiance
qu il nous a accordée dès le début et tout au long de
plusieurs mois de rédaction de ce travail.
? Mr. Jean-Marc TSHIVUADJI qui malgré ses charges
horaires et ses multiples occupations a bien voulu rendre disponible son temps
pour la codirection de notre travail.
Ces lignes sont pour nous la traduction de notre immense
redevance et remerciement.
Nous remercions également l'Ecole Supérieure
d'Informatique Salama pour la formation reçue et plus
particulièrement le Directeur General Mr. Jacquie MPUNGU.
Nous remercions notre précieux oncle ; BUTSHIKE Raphael
pour son soutien moral et ses conseils.
Nous remercions les frères, tantes, oncles et famille :
ISHARA Grace, Elias NTAWURUHUNGA, RUHATO Arcel, RUHATO Paulin, Trésor
MOTAPA, famille NGITA pour les encouragements.
Nous remercions enfin nos amis et collègues qui ont
contribuées pour la réalisation de notre travail : Ivan
KAMWIKALEBWE, MWAMBA Christian, KABWIK Pascal, KYUNGU Philippe, LUBAMBULA
Bob.
Que tous ceux dont nous n'avons pas fait une mention
explicite, veuillez ne pas nous tenir rigueur.
ADIDAS MBARUSHIMANA Daniel
Page | V
LISTE DES FIGURES
Figure 1. 3 Etape de l'évolution d'une maladie 11
Figure 1.4 Suivi sanitaire périodique[8] 12
Figure 1.5 Etiquette d'oreille[9] 12
Figure 1.6 Suivi de déplacement[10] 13
Figure 2.1 schéma synoptique du système 17
Figure 2.2 Diagramme de cas d'utilisation du système
18
Figure 2.3 Diagramme de séquence du système
19
Figure 2.4 Fonctionnement d'un capteur 21
Figure 2.5 Carte Arduino Uno[19] 23
Tableau 2.1 Caractéristique technique de la carte
arduino 25
Figure 2.6 Raspberry pi modèle B[24] 25
Tableau 1.2 Caractéristiques technique de la carte
Raspberry pi 27
Tableau 2 .3 Comparaison entre LoRa,Zigbee et WiFi 29
Figure 2.6 Architecture de la connectivité IOT avec
ThingSpeak[32] 31
Figure 2.7 Capteur de température LM35[34] 31
Figure 2.8 Capteur de pulsation cardiaque KY-039[37] 33
Figure 2.9 Capteur GPS NEO-6M[38] 33
Figure 2.10 Calcul de distance GPS 34
Figure 3.1 Première étape pour l'installation de
Arduino 38
Figure 3.2 Installation pilotes USB arduino 38
Figure 3.3 Interface de l'IDE Arduino 39
Figure 3.4 Configuration arduino 39
Figure 3.5 Interface de Proteus 40
Figure 3.5 Eléments du système 41
Figure 3.6 Nomination des câbles 41
Tableau 3.2 Evaluation des installations et configurations
41
Tableau 3.2 Evaluations des prix matériels 42
Figure 3.10 Tableau de bord 45
Page | VI
LISTE DES TABLEAUX
Tableau 1.2 Caractéristiques technique de la carte
Raspberry pi 27
Tableau 2 .3 Comparaison entre LoRa,Zigbee et WiFi 29
Tableau 3.2 Evaluation des installations et configurations 41
Page | VII
LISTE DES ACRONYMES
· GPS : Global Positionnement Système
· USART : Universal Synchronous /Asynchronous Receiver
/Transmitte
· NMEA : National Marine Electronics Association
· MHz : Mégahertz
· IDE Integrated Development Environment
· FPU : Floating-Point Unit
· Wi-Fi : Wireless Fidelity
· IrDA : Infrared Data Association
· IDE : Integrated Developpement Environement
· °C : degré Celsius
· BPM : Battement Par Minute
· RFID Radio Frequency IDentification
· A/N : Analogique Numérique
· CMOS Complementary Metal Oxide Semiconductor
· MOS : Metal-Oxide -Silicon
· UAL : Unité Arithmétique et Logique
· RAM : Randon Access Memory
· ROM : Read Only Memory
· EEPROM : Electrically Erasable Programmable Read-Only
Memory
· V : Volt
· UVPROM : Ultra-Violet Programmable Read Only Memory
· USB : Universal Serial Bus
· SD : Secure Digital
· KB : KiloByte
· SRAM : Static Random Access Memory
· SDRAM : Synchronous Dynamic Random Access Memory
· E/S : Entre / Sortie
· PWM : Pulse Width Modulation
· API : Application Programming Interface
· PAL : Phase Alternative Line
· NTSC : National Television System Committee
· HDMI : Hight Definition Multimedia Interface
· SDHC Secure Digital High Capacity
Page | VIII
TABLE DE MATIERES
EPIGRAPHE I
IN MEMORIAM II
DEDICACE III
REMERCIEMENT IV
LISTE DES FIGURES V
LISTE DES TABLEAUX VI
LISTE DES ACRONYMES VII
TABLE DE MATIERES VIII
AVANT PROPOS XI
CHAPITRE 0 : INTRODUCTION GENERALE 1
0.0 Aperçu générale 1
0.1 Problématique 1
0.2 Hypothèse 2
0.3 Choix et intérêt du sujet 2
0.4 Méthodologie (méthodes et techniques) 3
0.4.1 Méthode de recherche 3
0.4.2 Technique de recherche 3
0.5 Etat de l'art 4
0.6 Délimitation du travail 4
0.7 Subdivision du travail 5
0.8 Outils logiciels et équipement utilises 5
0.8.1 Logiciels 5
0.8.2 Equipements 6
CHAPITRE 1 : ETUDE DE L'EXISTANT
ET SPECIFICATION DES BESOINS 7
1.1 Introduction partielle 7
1.2 Présentation de la ferme ESPOIR 7
1.2.1 Aperçu générale et but 7
1.2.2 Situation géographique de la ferme Espoir 8
1.2.3 Climat 8
1.2.4 But principale 8
1.3 Etude de l'existant 9
1.3.1 Quelques notions sur la santé et
sécurité de l'animal 9
Page | IX
1.3.1.1 Santé et bien être 9
1.3.1.2 Cause principale de la maladie 9
1.3.1.3 Étape de l'infection de la maladie 11
2.5.2 Les méthodes utilisées pour minimiser
l'incidence des maladies et pertes
d'animaux 11
1.4 Critique de l'existant 13
1.5 Identification des besoins 13
2.5.1 Les besoins fonctionnels 13
2.5.2 Les besoins non fonctionnels 14
1.6 Analyse des contraintes 14
1.7 Conclusion partielle 14
CHAPITRE 2 ETUDE ET CONCEPTION DU SYSTEME 16
2.1 Introduction partielle 16
2.2 Solutions par rapports aux besoins 16
2.3 Bref aperçu sur le système embarqué
16
2.4 Conception de la structure générale 17
2.4.1 Présentation des différents blocs du
système 17
2.5 Modélisation du système 18
2.5.1 Diagramme de cas d'utilisation du système 18
2.5.2 Diagramme de séquence 18
2.6 Conception logique détaillé 19
2.6.1 Unité de traitement 19
2.6.2 L'alimentation 20
2.6.3 Unité de contrôle 21
2.6.3.1 Notions préliminaire 21
2.6.3.2 Nature de l'information que peut fournir un capteur
22
2.6.3.3 Caractéristique des capteurs 22
2.6.3.4 Classifications des capteurs 22
2.7 Conception physique 22
2.7.1 La carte arduino 23
2.7.2 Le Raspberry pi 25
2.7.3 Banana Pi 27
2.7.4 Technologie de transmission 28
2.7.5 Serveur d'application 29
Page | X
2.7.6 Etude et Présentations des capteurs 31
2.8 Solution retenue pour le choix du matériel et
logiciel 35
2.5 Conclusion partiel 36
CHAPITRE 3 : IMPLEMENTATION ET MATERIALISATION DE
LA
SOLUTION 37
3.1 Introduction partielle 37
3.2 Vérifications des prérequis 37
3.3 Procédure d'installation 37
3.3.1 Installation de l'IDE arduino 37
3.3.2 Installation automatique des bibliothèques 39
3.3.3 Installation de Proteus 40
3.3.4 Procédure de configuration 40
3.4 Mise en place du système et assemblage 41
2.5 Evaluation des durées des mises en places 41
2.6 Evaluation du cout du système 42
2.7 Test de configuration 42
2.8 Evaluation des besoins 45
2.9 Conclusion partielle 46
CONCLUSION GENERALE 47
Perspectives d'avenir 47
ANNEXES 48
REFERENCES 52
Page | XI
AVANT PROPOS
L'Ecole Supérieur d'informatique Salama (E.S.I.S en
sigle) organise une défense d'un projet à la fin du premier cycle
du cursus académique sous l'ordre du ministère de l'enseignement
supérieur et universitaire de notre pays la République
Démocratique du Congo. Ce projet est un concours de différentes
connaissances acquises, qui sur base d'un problème nous parvenons
à donner une solution qui peut toutefois améliorer avec le temps
vu l'évolution de la technologie.
C'est dans le même ordre que nous, étudiant de
troisième graduat réseau et télécommunication avons
choisi de défendre sur un projet qui s'intitule : « ETUDE ET MISE
EN PLACE D'UN SYSTEME TEMPS REEL DE SURVEILLANCE DE L'ETAT SANITAIRE ET
LOCALIASTION DES ANIMAUX ».
Le but de ce travail que nous avons choisi est de permettre
aux vétérinaires et éleveurs d'animaux de savoir le plus
tôt possible l'état de santé de leur animal lorsque ce
dernier commence à présenter quelques anomalies liées
à la santé et faire un suivi de déplacement à
distance via un moniteur.
Pour ce travail de fin d'étude, nous détaillons
notre solution de sa conception jusqu' à la réalisation du
résultat finale.
Enfin, il est important de noter que l'aboutissement de ce
projet est le fruit de multiples efforts conjugués avec notre directeur,
co-directeur, nos enseignants, vétérinaire et collègues
sans oublier des travaux élaborés par nos
prédécesseurs. Notons que nous n'avons pas la prétention
d'inventer mais juste d'appliquer nos capacités d'analyse et de
synthèse par rapport à l'existant.
INTRODUCTION GENERALE Page | 1
1 Lubumbashi : Ville, Chef-lieu de la province du
Haut-Katanga en République Démocratique du Congo.
CHAPITRE 0 : INTRODUCTION GENERALE
0.0 Aperçu générale
Dans la ville de Lubumbashi1 et comme partout dans
le monde, L'animal une importance capitale surtout dans la ferme
d'élevage et plus précisément dans nos maisons et nos
parcelles, celui-ci joue plusieurs rôles selon l'environnement notamment
: un compagnon, un confident pour les enfants, sécuriser la famille pour
ne pas dire de gardiennage, ainsi que d'autres rôles que nous n'avons pas
voulus cités dans ce travail. Au contraire de l'être humain,
l'animal lui a ses façons de communiquer pour exprimer ce qu'il
ressent.
Il est parfois difficile de communiquer avec l'animal pour
savoir ce qu'il a comme pathologie pour ne pas dire maladie ou ce qu'il avait
comme pathologie surtout lorsque cette dernière s'agit de la parvovirose
qui est une maladie infectieuse très contagieuse causée par un
virus appelé parvovirus, nous aurons à développer le signe
clinique principal de cette maladie qui est souvent la fièvre dans la
suite de notre travail nous allons développer cette situation.
Ainsi, le but de ce travail est de permettre aux
vétérinaires et éleveurs d'animaux de savoir le plus
tôt possible l'état sanitaire de leur animal lorsque ce dernier
commence à présenter quelques anomalies liées à la
santé et faire un suivi de déplacement. C'est ainsi que nous
avons donnés pour sujet ce travail : « Etude et mise en place
d'un système temps réel de surveillance de l'état de
santé et de localisation des animaux. »
0.1 Problématique
Dans le cadre de l'élevage des animaux en
général, on enregistre un nombre important de mortalité et
perte par manque de suivi en temps réel.
Partant de nos recherches détaillées. Nous
avons constaté à la ferme Espoir de Lubumbashi une perte des
espèces et une mauvaise gestion de suivi sanitaire des animaux, celle-ci
entraîne quelques défaillances entre autres la contamination de
maladie ; la mort subite, la disparition d'espèces etc.
La maladie dont il est question a pour symptôme
principale la fièvre. cette dernière induit une
température supérieure à la normale ainsi qu'une
augmentation de la fréquence respiratoire de l'animal.
Pendant la saison des pluies, les responsables de la ferme
sont obligés de renforcer un grand nombre des personnels (des fermiers)
pour essayer de pallier ces problèmes, ce qui a pour répercussion
l'augmentation du coût.
INTRODUCTION GENERALE Page | 2
Afin de remédier à ce problème, nous nous
sommes posé une question importante qui nous permettra de
résoudre notre problème.
? Quels mécanismes ou procédés pouvons-nous
mettre en place pour le suivi médical et de déplacements des
animaux ?
0.2 Hypothèse
Pour éviter les défaillances citées dans
notre problématique, nous allons mettre en place un système
informatique composé d'un microcontrôleur, traceur GPS et des
capteurs dans le but de veiller à la santé et déplacement
des espèces en temps réel.
Pour la mise en place de ce système, le
prélèvement de la température sera faite grâce au
capteur de température corporelle ce qui permettra d'avoir la
température de l'animale au moment opportun ou en temps réel.
Pour ce qui concerne la crise cardiovasculaire, un capteur de
pulsation cardiaque nous permettra de mesurer en temps réel les
battements du coeur de l'animal. Notons que les capteurs seront placés
à des endroits stratégiques autour du corps des animaux.
Ces informations ainsi recueillies pourront être
à la disposition du superviseur de la ferme via des indicateurs sur un
moniteur.
0.3 Choix et intérêt du sujet
Le choix a été porté sur le
présent sujet en raison des intérêts qu'il nous porte
personnellement mais aussi qu'il a sur la société, voici quelques
choix et intérêt :
? Choix du sujet
Dans le souci d'éloigner les dépenses, la mort,
acquisition des agents pathogènes et pleins d'autres problèmes
qui cadrent avec la santé de l'animal; c'est pour cela que nous avons
choisi ce sujet pour lutter contre l'aggravement d'une maladie chez le chien et
tous ceux dont nous avons énuméré au début dans
cette partie. Voilà pourquoi notre travail apporte une solution au
problème de suivi sanitaire et pertes des animaux que connaissent
différentes organisations d'élevages dans notre ville de
LUBUMBASHI.
? Intérêt du sujet
Ce travail n'est pas rédigé seulement dans
l'optique d'obtention de notre diplôme de fin de cycle, mais pour
faciliter les vétérinaires, éleveurs ou les
sociétés d'élevages a connaitre la situation sanitaire de
chaque animal sans pour autant demander plus de détail.
INTRODUCTION GENERALE Page | 3
0.4 Méthodologie (méthodes et techniques)
0.4.1 Méthode de recherche
· Méthode Top down : Le démarrage de tout
projet est toujours conditionné par un cahier des charges qui
décrit un problème auquel il faut apporter une solution. La
solution n'est atteinte qu'à partir du moment où elle est
définie dans ses moindres détails. Il est donc nécessaire
de partir des contraintes globales du projet et d'évoluer
progressivement vers le détail. La construction descendante (Top Down
Design) partira de l'ensemble pour arriver aux composants.
L'approche descendante est une méthodologie qui
commence au plus haut niveau d'un concept de design et se dirige vers le plus
bas niveau. Elle permet de délimiter et d'élaborer rapidement le
projet et de le couper en sous-parties aisément manipulables. Elle aide
donc d'avoir une vue globale du projet final et de donner une estimation
rapide, bien qu'approximative, de sa complexité et de son coût.
Cette méthode de conception nous a permis dans ce
présent travail, d'atteindre notre but partant d'une
démarche.[1], [2]
· Méthode analytique : cette
méthode consiste à faire une étude sur les
différentes parties d'un tout, expliquer et déterminer les
relations qu'elles entretiennent. Cette méthode nous aidera aussi pour
la rédaction de notre travail.
0.4.2 Technique de recherche
Nous avons utilisé quelques techniques pour effectuer
notre travail, dont nous avons : la technique de documentation, la technique
d'interview et la technique d'observation et enfin la technique de
simulation.
· La technique de documentation : nous a permis
de récolter les informations à travers des documents
différents afin de déterminer les points nécessaires dont
il est question dans ce travail ;
· La technique d'interview : nous a permis
d'interroger plusieurs catégories de personnes plus
particulièrement ceux du domaine (vétérinaire,
étudiant en médecine vétérinaire de
l'Université de Lubumbashi, les professeurs et les étudiants de
l'école supérieurs d'informatique Salama) qui cadre avec ce
travail pour avoir une vue conceptuelle ;
· La technique d'observation : nous a permis
d'analyser la situation de l'animal en question ainsi que son traitement pour
enfin ressortir quelques propositions d'hypothèses.
· Technique de simulation : cette technique
nous aide à utiliser les logiciels de validation temporelle ainsi que de
logiciels de simulation assisté par ordinateur.
INTRODUCTION GENERALE Page | 4
0.5 Etat de l'art
Nous ne pouvons pas dire que nous sommes les premiers à
traiter ce genre de sujet vu que la science évolue du jour au jour. Pour
arriver à élaborer ce travail nous avons parcouru les travaux de
ceux qui nous ont précédés scientifiquement en lisant :
Le travail de l'Ingénieur KILEPA Arcel. « ETUDE DE
LA MISE EN PLACE D'UN SYSTEME RFID POUR LA GESTION DES ANIMAUX CAS DU ZOO DE
LUBUMBASHI » Année académique 2015-2016.
La différence entre son travail et le nôtre est
que le travail de l'Ingénieur KILEPA Arcel parle de la
géolocalisation et suivi de déplacements des animaux une fois que
l'animal quitte sa zone et ce par rapport aux cellules qu'il a rayonné
dans le réseau qu'on saura que l'animal est à l'extérieur
à partir d'une cellule.
Pour ce qui concerne notre travail, nous parlons du suivi de
l'état sanitaire de l'animal dans une ferme et nous y intégrons
en améliorant une petite partie du travail l'Ingénieur KILEPA qui
est la géolocalisation.
Dans ce cas notre système aura pour rôle de
faciliter le contrôle de l'état de santé de l'animal et
suivre le déplacement de celui-ci en temps réel, en envoyant la
notification au superviseur de l'animal à partir d'un système de
monitoring.
Le travail de l'Ingénieur KYUNGU NGOIE Philippe
«MISE EN PLACE D'UN SYSTÈME PERMETTANT D'AMELIORER LA PRODUCTION DE
POULETS DE CHAIR » « Cas d'un poulailler industriel » il parle
du contrôle des éléments indispensables à la
production de poulet de chair, tels que la température extérieur
ou du milieu, taux d'humidité litière ainsi que
l'approvisionnement en eau. Les données peuvent être
récupérées à distance via un serveur mqtt (Internet
des objets).
Quant à notre travail il s'agit d'un système
temps réel de surveillance des éléments clés
liée à la santé de l'animal tels que le rythme cardiaque
et la température corporelle de ce dernier tout en le localisant avec
système de géolocalisation.
Ces éléments âpres avoir été
collectés à distance via un serveur ThingSpeak vont être
visualisés sous forme des valeurs bien précises.
0.6 Délimitation du travail
Etant donné qu'un travail ne peut pas répondre
à toutes les préoccupations de la société ou
satisfaire à tous les besoins des utilisateurs. C'est ainsi qu'afin de
mener à bon
escient notre étude, nous la délimiterons dans le
temps et dans l'espace.
INTRODUCTION GENERALE Page | 5
? Dans l'espace: nous avons mené nos recherches sur la
mise en place d'un système temps réel de suivi sanitaire de
l'animale comme cas d'application nous avons pris la ferme ESPOIR de Lubumbashi
;
? Dans le temps : vu que tout projet doit avoir une limitation
dans le temps, c'est pourquoi notre travail s'étendra sur la
période qui va de 2020 à 2021, période où les
données passent de la conception de l'étude a sa
réalisation.
0.7 Subdivision du travail
En excluant l'introduction et la conclusion
générale, notre travail vas comporter trois chapitres dont :
Le premier chapitre : « ETUDE DE
L'EXISTANT ET SPECIFICATION DES BESOINS ». Dans ce chapitre il sera
question pour nous de parler du système de suivi sanitaire de l'animal
qui existe à travers le ferme d'élevage de la ville de
Lubumbashi, donner leurs limites et de donnes aussi les besoins qui nous ont
poussés à concevoir le futur système.
Le deuxième chapitre : «ETUDE
ET CONCEPTION DU SYSTEME ». Dans ce chapitre il sera question de
décrire comment le système devrait être, donner une
solution aux besoins soulevés dans le premier chapitre afin de pouvoir
choisir la technologie que nous allons utiliser.
Le troisième chapitre :
«IMPLEMENTATION ET MATERIALISATION DE LA SOLUTION». Dans ce
chapitre nous allons réaliser le système que nous avons
conçu.
0.8 Outils logiciels et équipement utilises
0.8.1 Logiciels
Pour la réalisation de notre travail, différents
logiciels nous ont été utiles. Le voici :
- Microsoft Visio ;
- Microsoft Word ;
- Zotero ;
- Microsoft Windows ;
- Fritzing
- Arduino IDE.
- Proteus.
- Google earth
- ThingSpeak
INTRODUCTION GENERALE Page | 6
0.8.2 Equipements
Pour la réalisation de notre système, nous
allons utiliser différents équipements. Nous
citons :
- Ordinateur portable
- Téléphone portable ;
- Carte arduino ;
- Capteur de température corporelle ;
- Capteur de pouls (fréquence cardiaque) ;
- Module GPS ;
- Plaque d'essai ;
- Jumper câbles ;
ETUDE D E L'EXISTANT E T SPECIFICATION DES
BESOINS Page |7
CHAPITRE 1 : ETUDE DE L'EXISTANT ET SPECIFICATION
DES
BESOINS
1.1 Introduction partielle
Comme nous avons développé les
problématiques et les hypothèses, il est important pour nous
d'étudier le système que nous désirons déployer.
Notre système détermine ce que l'animal
présenterait comme symptômes de maladie et aidera au
vétérinaire, propriétaire des fermes d'élevage de
ne pas fournir beaucoup d'effort lors du traitement de la maladie aussi leurs
permettre de ne pas beaucoup dépenser une somme importante pour donner
chaque fois aux vétérinaires parce que la plupart de ce dernier
n'accepte pas d'être permanent dans une seule ferme vu qu' il sont
beaucoup sollicités a d'autre secteur et cherche toujours à
augmenter leurs finances. Quant particulièrement dans l'élevage
à domicile et généralement aux fermes de Lubumbashi, ce
système aidera à la diminution du taux de mortalité des
certains animaux et aux dépenses pour acheter certains
remèdes.
Dans cette partie nous allons faire une étude de
l'existant puis nous allons voir de quelle façon nous procèderons
à la mise en place de notre système selon les besoins et quelques
critères de choix logiciels et matériels et quelques notions sur
la santé de l'animal.
1.2 Présentation de la ferme ESPOIR 1.2.1
Aperçu générale et but

La ferme EPOIR est Située à pratiquement 12 km
de la ville de Lubumbashi sur la route de Kasumbalesa2. Il s'agit de
la ferme d'un agent de l'État congolais et qui a choisi de prêcher
par l'exemple et d'appliquer sur le terrain ce principe prôné de
retour à la terre.
La ferme Espoir couvre environs 700 hectares, il produit
notamment du maïs et s'est
spécialisé dans l'élevage de plusieurs
animaux tels que les porcs, les vaches, les

A noter que la ferme ESPOIR compte plus de 40 000 bêtes
(bovins, Ovins, Equidés Porcins et Azides).
autruches, les agneaux, les poulets de chair et plein d'autre,
...[3]
2 Ville congolaise située à la
frontière avec la Zambie
Le but principale de la ferme espoir est d'assurer
l'après- mines en investissant dans l'élevage, la culture et la
terre. Ce qui permet de nourrir la population en plus de
ETUDE D E L'EXISTANT E T SPECIFICATION DES
BESOINS Page |8
1.2.2 Situation géographique de la ferme
Espoir
La situation géographique de la ferme ESPOIR se
présente comme suit :
- L'altitude est une élévation verticale d'un
point ou un lieu par rapport au niveau de la mère, la valeur est de 1240
m.
- La latitude est la distance angulaire d'un point de la terre
à l'équateur et la ferme espoir est à
11°44'09»Sud ;
- La longitude c'est la distance angulaire a un
méridien d'origine vers l'ouest et est à
27°25'23»Est
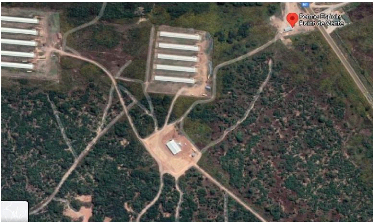
Figure 1.1 Vue de dessus de la ferme Espoir (Google earth)
1.2.3 Climat
La ferme espoir est couvert par le même climat de la
ville de Lubumbashi c'est à dire un climat tropical avec deux saisons
qui sont :
- La saison Pluvieuse s'étend du mois de novembre au mois
d'avril de l'année suivante, avec une emprise de deux mois de chaleur
(septembre et octobre) ;
La saison Sèche se vit à partir du mois d'avril
jusqu' au mois de septembre avec une particularité de deux mois secs qui
sont juin et juillet.
1.2.4 But principale
ETUDE D E L'EXISTANT E T SPECIFICATION DES
BESOINS Page |9
Etude de l'existant
1.3

fournir des emplois et de positionner la province comme
exportatrice auprès des pays voisins notamment. Le but est
louable.[4]
1.3.1 Quelques notions sur la santé et
sécurité de l'animal
Avant que nous ne puissions étudier les
mécanismes utilisés dans la lutte contre l'aggravation des
maladies et des pertes d'animaux nous allons commencer par connaître les
origines, les causes ainsi que les étapes d'évolution de la
maladie.
1.3.1.1 Santé et bien être
Les concepts santé et bien-être qu'il soit
appliqué à l'homme ou aux animaux, sont de plus souvent
associés.
Le bien-être du bête englobe pas seulement la
sante et le bien-être physique de l'animal, mais aussi son
bien-être psychologique et la possibilité d'exprimer les
comportements importants propres à son espèce. Le bien-être
peut être décrit comme satisfaisant si les animaux sont en bonne
santé physique et psychologique, se sentent bien et ne souffrent pas,
selon les Cinq Libertés. En voici :
- Le bête ne doit pas souffrir d'inconfort c'est
à dire l'environnement où reste l'animal doit être de bonne
qualité ;
- L'animal ne doit pas souffrir de la soif ou de manque de la
nourriture : accès à de l'eau fraîche et à une
nourriture adéquate assurant la bonne santé et la vigueur des
animaux ;
- Pouvoir exprimer les comportements naturels propres a
l'espèce : espace suffisant, environnement approprié aux besoins
des animaux, et contact avec d'autres congénères ;
- Ne pas souffrir de douleurs, de blessures ou de maladie:
prévention ou diagnostic rapide et traitement ;
- Enfin, Ne pas éprouver de peur ou de détresse:
conditions d'élevage et pratiques n'induisant pas de souffrances
psychologiques[5].
1.3.1.2 Cause principale de la maladie
Aucun animal n'est à l'abri de la maladie, toute fois
nous ne pouvons pas combattre la maladie sans pour autant connaître les
causes qui peuvent être à l'origine. Nous identifions les causes
de la maladie dans la ferme :
? Hygiènes non respecté
En matière d'élevage, les éleveurs et le
personnel de l'industrie consciencieux veillent véritablement à
la santé, au bien-être et à la productivité des
animaux. Ils savent qu'il est possible de prévenir les maladies. Ils
adoptent des pratiques de gestion de la santé
ETUDE D E L'EXISTANT E T SPECIFICATION DES
BESOINS Page |10
pour prévenir l'introduction et/ou la propagation de
maladies au sein de la ferme mais aussi ils sont les acteurs qui apportent les
maladies chez les animaux dans l'effet d'accorder une nourriture non
exigé, de ne pas veiller à la propreté de l'environnement
où l'animal passe beaucoup de temps.

Figure 1.2 Animal malade et enfermé dans l'hygiène
non respecté ? Mauvaises gestions des nouveaux arrivants
Les maladies contagieuses sont transmises directement d'une
bête infectée à une bête non infecté. Il
s'agit ici du mode de propagations de virus qui est le plus fréquent
notamment appeler Parvovirus. Ce dernier a une maladie appelée
Parvovirose qui peut persister dans un milieu ou dans l'environnement pendant
une longue période jusqu'à 6 mois voire plus, sur le mur ou le
sol même bien nettoyés. Il (parvovirus) peut être
transporté sur les vêtements, les semelles de chaussures et bien
d'autres supports avant d'être l'origine de contamination.
Elle est la maladie la plus fréquente chez le chien de
tout âge et aussi la cause la plus fréquente de mortalité
des animaux en élevage.

Figure 1.3 Distribution des aliments sans norme
hygiénique respecté[6]
ETUDE D E L'EXISTANT E T SPECIFICATION DES
BESOINS Page |11
1.3.1.3 Étape de l'infection de la
maladie
Pour que la maladie se manifeste sur l'animal dont il est
question dans ce travail, nous avons 3 étapes différentes
à savoir :
- La durée d'incubation : temps entre le contact avec
le virus et l'apparition de première symptômes, cette phase est
courte, allant de 3 à 5 jours ;
- La phase d'état : c'est la phase durant laquelle les
symptômes sont exprimé au complet est dure environ une semaine.
- La mort ou la guérison du chien : c'est la phase
finale[7].

Figure 1. 3 Etape de l'évolution d'une
maladie
2.5.2 Les méthodes utilisées pour
minimiser l'incidence des maladies et pertes d'animaux
Nous ne saurions débuter ce travail sans une
idée claire et précise sur l'existant quel qu'il soit; c'est
pourquoi nous commencerons par une étude de ces quelques
mécanismes qui sont utilisés pour minimiser l'incidence des
maladies et pertes d'animaux dans la ferme.
? Suivi sanitaire périodique
Dans la plupart de cas, l'éleveur joue un rôle
essentiel car c'est lui qui connait le mieux ses animaux et les suit au
quotidien. Lorsqu' il constate qu'un animal est malade ou qu'il a un
comportement anormal, il est tenu de l'isoler dans un local, de noter ces
informations dans un registre et d'en informer aussitôt son
vétérinaire. Ce dernier passe régulièrement faire
de traitement ou examen de l'animal tout en écoutant les indices
constatés par l'éleveur.
ETUDE D E L'EXISTANT E T SPECIFICATION DES
BESOINS Page |12

Figure 1.4 Suivi sanitaire périodique[8]
? Etiquetages d'oreille
Les étiquettes d'oreille sont
généralement utilisées pour l'identification des animaux
aux seins des troupeaux. Cette méthode possède un numéro
d'identification qui permet d'avoir les renseignements sanitaires des
bétails, agrafés à l'oreille d'animaux. Ces
étiquettes peuvent être des puces RFID ou de simples indications
écrites ou gravées. Les étiquettes sont souvent en
plastique ou en métal.

Figure 1.5 Etiquette d'oreille[9] -
Étiquettes en plastique
La possibilité de lire les étiquettes en
plastique d'une certaine distance constitue leur principal avantage. On compte
plusieurs sortes d'étiquettes en plastique ou en caoutchouc sur le
marché. Elles sont offertes en plusieurs couleurs, avec ou sans
numéro, ce qui permet aux producteurs d'y indiquer un numéro
propre à leur système de numérotation, la race de
l'animal, ainsi que son géniteur et sa mère, entre autres. La
taille et la forme des étiquettes varient également, et des
étiquettes recto-verso sont disponibles. Les boutons servant à
maintenir les étiquettes bien en place peuvent aussi être
commandés déjà numérotés.
Les revendeurs d'étiquettes donnent des
étiqueteurs conçus spécialement pour poser leurs
étiquettes. Il est important de poser l'étiquette au bon endroit
sur l'oreille pour éviter que l'animal ne la perde. Les fabricants
d'étiquettes fournissent des directives sur l'étiquetage et
l'emplacement idéal des étiquettes dans l'oreille propre à
leur modèle d'étiquette.
ETUDE D E L'EXISTANT E T SPECIFICATION DES
BESOINS Page |13
- Etiquettes en métal
Les étiquettes en métal sont des
étiquettes d'oreille en acier auto-perçantes qui sont
économiques et faciles à poser sur l'oreille de la bête.
Elles sont offertes en diverses couleurs et se détachent rarement.
Toutefois, les numéros figurant sur ces étiquettes sont petits.
Comme il faut contenir les animaux pour les lire.
? Surveillance en cas de déplacement
A chaque déplacement des animaux, L'éleveur est
obligé d'accompagner les animaux dans le but de les surveiller pour
qu'ils ne se perdent ou n'accèdent pas à certaines zones à
risque tel que les villages aux alentours de la ferme, les rivières
etc.

Figure 1.6 Suivi de déplacement[10]
1.4 Critique de l'existant
Nous pouvons dire avec certitude que toutes ces
méthodes utilisés pour minimiser des maladies et pertes d'animaux
que nous avons mentionné ci-haut sont très pratique et efficaces
pour la protection et aussi la sécurisation des animaux mais en
analysants toutes ces méthodes nous remarquons que la plupart
nécessite une intervention humaine et cela montre aussi qu'il est
hasardeux de compter uniquement sur les réactions humaines et cela
constitue un désavantage pour la sécurité et la protection
des animaux dans la ferme d'élevage nous citons la fatigue humaine ou
soit il peut être absent lors du suivi en présentiel.
1.5 Identification des besoins 2.5.1 Les besoins
fonctionnels
Les besoins fonctionnels sont des fonctionnalités du
système. Ce sont des besoins spécifiant un comportement
d'entrée/sortie de notre système. Ces fonctions doivent
être ordonnées, hiérarchisées et quantifiées
sous la forme de valeurs de performance attendue. Ainsi pour le cas de notre
système, il doit être en mesure :
? de prélever la température corporel de l'animal ;
? de récupérer le rythme cardiaque de l'animal ; ? de localiser
l'animal ;
? de notifier le superviseur ;
Nous avons aussi fait un aperçu sur la santé et
la perte des animaux en insistant sur les origines des maladies, les pertes et
quelques moyens de préventions.
ETUDE D E L'EXISTANT E T SPECIFICATION DES
BESOINS Page |14
+ d'offrir un tableau de bord (afficheur) pour visualiser les
valeurs. 2.5.2 Les besoins non fonctionnels
Les besoins non fonctionnels sont des contraintes relatives
à l'implémentation de notre solution. Ce qui constituent un
critère de choix de notre solution optimale[11]. Notre système
devra répondre aux critères suivants :
> La rapidité il s'agit ici de voir la
manière dont le système va réagir suivant les contraintes
temporelles que nous aurons à définir ;
> Le coût abordable : le système doit avoir un
cout que les éleveurs et les vétérinaires peuvent
aborder;
> La crédibilité le système doit
être digne de confiance;
> La fiabilité et disponibilité; le
système doit être opérationnel et fonctionner correctement
dans les temps impartis pour permettre aux éleveurs et
vétérinaire de faire un bon suivi ;
> Simplicité ;
> L'extensibilité : le système doit
être à mesure de prendre aussi en charge des nouvelles
fonctionnalités ;
> Temps réel : le système doit être mono
tache lors de l'exécution. 1.6 Analyse des
contraintes
Quelle que soit sa conception, un système
électronique est toujours soumis à certaines contraintes. Lors de
la réalisation et de l'implémentation.
- Temps de réalisation : ce projet de fin de cycle est
à réaliser durant une période bien défini. En effet
ce temps contient la rédaction de ce travail, l'acquisition des
matériels ainsi que la réalisation.
- Utilisation du système : bien que le système
vise à diminuer le taux de mortalité de l'animal dans une ferme,
ce système est informatique. De ce fait pour la réalisation, il y
a nécessité d'avoir des connaissances en informatique et
électronique. Ce qui veut dire que dans des cas extrêmes nous
serons sollicité en cas de pannes et aussi il faut apporter des
explications sur les fonctionnements du système.
1.7 Conclusion partielle
Tout au long de ce chapitre, nous procède par la
présentation générale de notre cas d'application qui est
la ferme espoir, en donnant aussi quelques objectifs sociaux ainsi que les
animaux que la ferme possède.
ETUDE D E L'EXISTANT E T SPECIFICATION DES
BESOINS Page |15
Ainsi, la connaissance de toutes ses informations sur les
besoins, les contraintes et les critères de choix nous permettra dans le
deuxième chapitre de mettre une solution pour le suivi sanitaire et de
déplacement de l'animal.
ETUDE E T CONCEPTION D U S Y S T E M E Page
|16
CHAPITRE 2 ETUDE ET CONCEPTION DU SYSTEME
2.1 Introduction partielle
La conception est l'ensemble des études
préliminaires des composants que doivent constituer un système ou
un produit. C'est une étape essentielle lorsque nous voulons
résoudre un problème. Si un système est bien conçu
dans son intégralité, il n'y aura pas des défaillances qui
pourront influencer son bon fonctionnement ou le perturber.[12] C'est pourquoi
cette étape va nous permettre d'assurer un bon fonctionnement de notre
système dans son intégralité.
Dans ce chapitre, après la spécification
fonctionnelle du système, il sera question pour nous de concevoir notre
système de manière à apporter une solution à notre
problème en donnant le rôle et la fonction de module qui le
constitue également en présentant généralement
notre système en donnant quelques explications de chaque composant de
celui-ci.
2.2 Solutions par rapports aux besoins
Les besoins ont déjà été
annoncés dans le chapitre précèdent. Ici nous allons
donner les solutions par rapport aux besoins fonctionnels. Ces solutions
répondent aux problèmes rencontrées dans la
problématique. Hormis nos solutions, plusieurs autres peuvent être
mises en place dont nous citons une :
La mise en place des agents à chaque coin dans la ferme
pour surveiller l'état sanitaire et faire un suivi de déplacement
de chaque animal. L'inconvénient de cette solution se pose aux niveaux
du cout à payer aux agents et aussi leurs disponibilités a temps
plein qui ne sont pas garantie par l'effet de la fatigue.
Nos solutions sont telles que les capteurs détectent
les températures corporelles, les fréquences cardiaque ainsi que
la position géographique de l'animal ; les données recueillies
seront traiter puis envoyées et être affichées au niveau du
moniteur par le superviseur.
2.3 Bref aperçu sur le système
embarqué
Un système embarqué est un système
électronique et informatique autonome qui ne possède pas des
entrées/Sorties standards comme un clavier ou un ordinateur. On le
définit aussi généralement par le fait qu il n'est pas
visible en tant que tel mais est intégré dans un matériel
doté d'une autre fonction. Ce système est autrement dit enfoui,
ce qui traduit plus fidèlement le terme anglais Embedded system[13].
ETUDE E T CONCEPTION D U S Y S T E M E Page
|17
Du fait de la nécessite d'une architecture physique
confinée, la machine et le logiciel sont intimement lies et ne sont pas
aussi discernables que dans un environnement classique de type PC. Par
ailleurs, la conception de ces systèmes est généralement
fiable au cause de leur utilisation dans des domaines forts contraints mais
également parce que l'accès au logiciel est souvent difficile une
fois le système fabriqué[13].
Au final, il existe une petite différence entre un
système embarqué et un système embarqué temps
réels ; il devient temps réels lorsqu'on lui ajoute une
contrainte temporelle3.
2.4 Conception de la structure
générale

Figure 2.1 schéma synoptique du système
2.4.1 Présentation des différents blocs du
système
a) Bloc d'alimentation
L'ensemble de dispositifs (bloc) de notre système exige
une alimentation en énergie électrique pour le bon
fonctionnement. Ce bloc aura pour but de fournir une tension importante au bon
fonctionnement des différents blocs.
b) Bloc de contrôle
Le bloc de contrôle sera chargé d'interagir avec
l'animal et l'élément principal dans ce bloc est le capteur. Pour
notre cas quelques capteurs sont utiles tel que le capteur de
température corporelle, le capteur de rythme cardiaque et le micro
capteur pour la géolocalisation de l'animale.
c) Bloc de traitement
Ce bloc est le cerveau de notre système parce qu'il
contient le microcontrôleur.
d) Bloc de transmission
Le superviseur de l'animal doit avoir les informations
sanitaires ainsi que la position de leur animal ; le rôle de ce bloc sera
donc d'acheminer l'information à distance.
e) Bloc d'affichage
Ce bloc affiche les valeurs ou les informations
générales que les capteurs ont récoltées.
3 Lorsqu' il respecte l'exécution des taches
selon le temps qui été défini
ETUDE E T CONCEPTION D U S Y S T E M E Page
|18
ETUDE E T CONCEPTION D U S Y S T E M E Page
|19
2.5 Modélisation du système
2.5.1 Diagramme de cas d'utilisation du
système
Un diagramme de cas d'utilisation est un moyen simple
d'exprimer des besoins. Il montre le comportement d'un composant, une classe ou
un système, tel qu'un utilisateur extérieur le voit. Il
correspond à un ensemble de transactions effectuées au cours
d'une interaction entre l'acteur et le système[14]. Ci-après le
diagramme de cas d'utilisation :
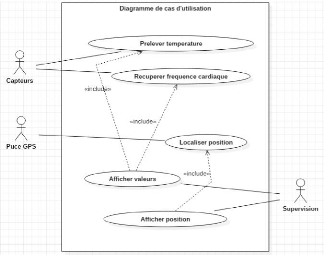
Figure 2.2 Diagramme de cas d'utilisation du système
2.5.2 Diagramme de séquence
Les diagrammes de séquences permettent de
représenter des collaborations entre objets selon un point de vue
temporel, on y met l'accent sur la chronologie des envois de messages. On
décrit le contexte ou l'état des objets, la représentation
se concentre sur l'expression des interactions. Ci-après le diagramme de
séquence de notre système :
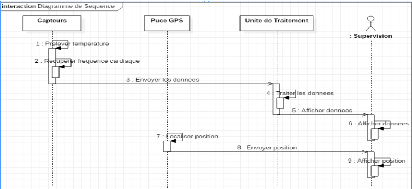
Figure 2.3 Diagramme de séquence du
système
2.6 Conception logique détaillé 2.6.1
Unité de traitement
Le cerveau du système est composé surtout d'un
microcontrôleur qui est par définition un microprocesseur
(simplifiée) auquel on a adjoint sur la même puce de la RAM, de la
ROM, des entrées/sorties. A l'origine, les microcontrôleurs
étaient utilisés pour des systèmes de contrôle des
processus d'environnement. Aujourd'hui, ils sont au coeur d'une part importante
d'applications embarquées.[15]
Ils sont spécialisés dans la gestion
d'échange d'information avec les périphériques. Ils
permettent de répondre aux exigences des applications de type
contrôleur comme les contrôleurs de systèmes industriels ou
de communication. Ces circuits présentent une organisation et un jeu
d'instructions caractérisé par la primauté du traitement
logique sur l'arithmétique.
Le microcontrôleur est composé de quatre parties
:
1. Un microprocesseur qui prend en charge la partie
traitement des informations et envoie des ordres. Il est lui-même
composé d'une unité arithmétique et logique (UAL) et d'un
bus de données. Il a pour rôle d'exécuter le programme
embarqué dans le microprocesseur.
2. Une mémoire de données (RAM ou EEPROM) dans
laquelle seront entreposées les données temporaires
nécessaires aux calculs. C'est en fait la mémoire de travail qui
est volatile.
3. Une mémoire programmable(ROM) qui contient les
instructions du programme pilotant l'application à laquelle le
microcontrôleur est dédiée. Il s'agit ici d'une
mémoire non volatile puisque le programme à exécuter est a
priori toujours le même. Il existe différents types de
mémoires programmables et utilisables selon l'application. Notamment
:
? UVPROM que l'on peut effacer plusieurs fois
grâce aux ultraviolets.
ETUDE E T CONCEPTION D U S Y S T E M E Page
|20
? EEPROM effaçable de façon électrique comme
les mémoires flash.
4. La dernière partie correspond aux ressources
auxiliaires qui sont généralement : ? Des ports d'entrées/
sorties parallèles et séries.
? Des timers4 pour générer ou mesurer
des signaux avec une grande précision temporelle.
? Des convertisseurs A/N pour traiter les signaux analogiques.
Les avantages des microcontrôleurs :
> Diminution de l'encombrement du matériel et du
circuit imprimée ;
> Augmentation de la fiabilité du système ;
> Simplification du tracé du circuit imprimé
(plus besoin de tracer de bus) ;
> Intégration en technologie MOS, CMOS ;
> Réduction des couts ;
> Environnement de programmation et de simulation
évolués.
Les inconvénients des microcontrôleurs sont :
> L'Investissement dans les outils de développement
;
> Ecrire les programmes, les tester et tester leur mise en
place sur le matériel qui entoure le microcontrôleur ;
> Les microcontrôleurs les plus intégrés
et les moins couteux sont ceux disposant de ROM programmables par masque ;
> Incompatibilité possible des outils de
développement pour des microcontrôleurs de même
marque.[16]
2.6.2 L'alimentation
Dans toutes applications électroniques, l'alimentation
est un sous-système incontournable. Sa fonction consiste à
fournir une ou plusieurs tensions continues stabilisées.
Le courant continu qui est un courant qui circulent toujours
dans le même sens (du + vers le -) sa fréquence et de 0 Hz et que
son intensité est constante au cours du temps sera plus adapte pour nos
montages électroniques qui demandent une quantité
d'énergie électrique précise et fixe au cours du temps.
4 Des fonctions spécifiques comme des compteurs
programmables
ETUDE E T CONCEPTION D U S Y S T E M E Page
|21
Figure 2.4 Courant Continu
Contrairement au continu, le courant alternatif c'est à
dire qui sort du prises est un courant qui change de sens selon une
fréquence 50 Hz en République démocratique du Congo.
Notons que son intensité varie au cours du temps.
Figure 2.5 Courant Alternatif
2.6.3 Unité de contrôle
2.6.3.1 Notions préliminaire
Dans de nombreux domaines (industrie, santé, recherche
scientifique, services, loisirs, etc...), on a besoin de contrôler de
nombreux paramètres physiques (température, force, position,
vitesse, luminosité, etc. ...). Le capteur est donc
l'élément indispensable à la mesure de ces grandeurs
physiques.[17] le capteur est indispensable à la mesure de ces grandeurs
physique qui détecte un évènement physique situé
dans son environnement se rapportant au fonctionnement du système et
traduit cet évènement en un signal exploitable par le
système. Ce signal est généralement électrique sous
forme d'un signal basse tension.
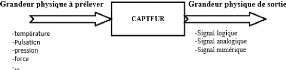
Figure 2.6 Fonctionnement d'un capteur
ETUDE E T CONCEPTION D U S Y S T E M E Page
|22
Il existe plusieurs technologies à base de
microcontrôleur entre autre: arduino, raspberry pi, banana pi etc. Notre
travail se basera sur deux microcontrôleurs : arduino et Raspberry
2.6.3.2 Nature de l'information que peut fournir un capteur
Suivant son type, l'information qu un capteur peut fournir est soit :
- Logique : l'information ne peut pas prendre que les valeurs
1 ou 0, on parle d'un capteur tout ou rien ;
- Analogique : l'information peut prendre toutes les valeurs
possibles entre deux certaines valeur ;
- Numérique : l'information fournie par le capteur
permet au système d'en déduire un nombre binaire sur n
bits[16].
2.6.3.3 Caractéristique des capteurs
- L'étendue de mesure : Valeurs extrêmes pouvant
être mesurée par le capteur ;
- Sensibilité : Variation du signal de sortie par rapport
à la variation du signal
d'entrée ;
- Résolution : Plus petite variation de grandeur mesurable
par le capteur ;
- Précision : Aptitude du capteur à donner une
mesure proche de la valeur vraie ;
- Rapidité : Temps de réaction du capteur. La
rapidité est liée à la bande
passante[16], [18] ;
2.6.3.4 Classifications des capteurs La classification
se fait par :
- le phénomène physique qu'il traduit (capteur
de température, de pulsation, de gaz,...) ;
- le signal qu'ils fournissent (capteur analogique, capteur
logique, capteurs digitaux) ;
- leur principe de traduction du phénomène
physique (capteur résistif, a effet Hall,...) ;
- leur principe de fonctionnement : les capteurs fonctionnent
selon deux principes de base suivant l'origine du signal électrique de
sortie.
Ainsi on distingue :
? le capteur actif : celui dont la grandeur physique
elle-même mesurée établit directement une relation
électrique de sortie.
Par exemple : une photorésistance ;
? le capteur passif : donne une image de la grandeur physique
qu'il mesure par une résistance électrique variable.
Par exemple : un thermocouple ;
2.7 Conception physique
Les systèmes à microcontrôleurs sont
beaucoup plus utilisés dans le domaine électronique plus
précisément dans la domotique pour le contrôle automatique
d'un environnement.
ETUDE E T CONCEPTION D U S Y S T E M E Page
|23
5 Est un environnement de programmation graphique pour
rendre la programmation informatique physique avec Arduino aussi facile que de
glisser-déposer. C'est un plugin qui s'ajoute à l'IDE Arduino.
pi pour étudier et faire le choix technologique tout en
nous référant aux besoins non fonctionnels décrits dans le
chapitre précèdent.
2.7.1 La carte arduino
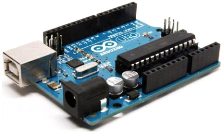
Figure 2.7 Carte Arduino Uno[19]
Le système Arduino est un microcontrôleur qui
nous donne la possibilité de mettre ensemble les performances de la
programmation et celles de l'électronique. Plus
précisément, arduino nous permet de programmer des
systèmes électroniques.
L'avantage majeur de l'électronique programmée
c'est qu'elle simplifie grandement les schémas électroniques et
par conséquent, le coût de la réalisation, mais aussi la
charge de travail dans la conception d'une carte électronique[20].
Comme tout équipement électronique, arduino
possède des avantages et des inconvénients ; commençons
par voir les avantages de cette carte.
? Les principaux avantages de la technologie Arduino
sont[20], [21] :
? Un accès libre aux schémas
électroniques des cartes qui permettent à qui le souhaite
(entreprises, amateurs) de fabriquer et vendre sa propre carte à
condition de ne pas utiliser le nom de la marque;
? La possibilité d'ajouter des applications au logiciel
ARDUINO comme le logiciel gratuit ARDUBLOCK5 qui permet d'associer
une interface graphique de programmation très simple pour les
collégiens ;
? Une compatibilité sous toutes les plateformes,
à savoir : Windows, Linux et Mac OS12.
? La connectique des cartes est standardisée ce qui
permet de connecter très facilement des cartes additionnelles
compatibles appelées Shields Arduino c'est à-dire la technologie
ARDUINO est très modulaire et laisse aux concepteurs la
possibilité d'exprimer leur créativité par la mise en
oeuvre rapide d'un prototype grâce à l'offre très riche des
Shields proposés par les fabricants ;
ETUDE E T CONCEPTION D U S Y S T E M E Page
|24
> Une communauté ultra développée ! Des
milliers de forums d'entre aide, de présentations de projets, de
propositions de programmes et de bibliothèques ;
> Une liberté quasi absolue. Elle constitue en
elle-même deux choses :
· Le logiciel : gratuit et open source,
développé en Java, dont la simplicité d'utilisation
relève du savoir cliquer sur la souris ;
· Le matériel : cartes électroniques dont les
schémas sont en libre circulation sur internet. > La carte Arduino
nous permet aussi de réaliser plusieurs tâches comme :
· Contrôler des appareils domestiques ;
· Donner une «intelligence» à un robot
;
· Réaliser des jeux de lumières permettre
à un ordinateur de communiquer avec une carte électronique et
différents capteurs ;
· Télécommander un appareil mobile
(modélisme).
> Arduino a une capacité «temps réel»
et «analogique» ; Cette flexibilité lui permet de travailler
avec à peu près tout type de capteur ou de puce ;
> Une faible consommation électrique et un
fonctionnement déterministe ;
> L'Arduino est plus simple, plus difficile à
«casser» ou à «endommager ;
> Vous pouvez également l'activer et le
désactiver en toute sécurité à tout moment ;
> L'IDE Arduino est nettement plus facile à utiliser
que Linux.
+ Inconvénients d'Arduino[20],
[22]
> Une mémoire embarquée limitée qui rend
les programmes complexes difficiles à réaliser ;
> Une puissance de calcul limitée (8 bits, 16MHz, pas
de FPU) ;
> Elle n'a pas de système d'exploitation pour
implémenter de logiciel de contrôle ;
> L'absence d'une option de connectivité
intégrée ce qui limite les utilisations possibles de l'Internet
des objets,
> Elle n'a pas une grande capacité mémoire ;
> Elle n'a pas une grande capacité mémoire ;
ETUDE E T CONCEPTION D U S Y S T E M E Page
|25
? Caractéristiques
techniques[23]
Tableau 2.1 Caractéristique technique de la carte
arduino
Nommage Critère
Microcontrôleur ATmega328
Fréquence horloge 16MHz
Tension d'alimentation 7-12V
Tension de fonctionnement 5V
Broche E/S numériques 14(dont 6 disposent d'une sortie
PWM)
Tension d'alimentation (limites) 6-20V
Broche d'entrées analogiques 6 (utilisables en bronches
E/S
numériques)
Mémoire volatile SRAM 2KB
Mémoire non volatile EEPROM 1KB
Interface USB (permet d'alimenter la carte et de
transféré les programme vers la carte)
|
Alimentation externe Dimensions
|
Jack
6,86 cm * 5,3 cm
|
2.7.2 Le Raspberry pi

Figure 2.8 Raspberry pi modèle B[24]
Le Raspberry Pi est initialement prévu pour une
utilisation dans le monde de l'éducation avec une forte composante
"programmation".
Raspberry Pi a été conçu comme un
micro-ordinateur portable à bas prix pour développer les talents
de bricoleur. L'équipe d'Upton a commencé à travailler sur
des prototypes en 2006 et le premier lot de Pi a été
achevé en avril 2012.
Le Raspberry Pi est un micro-ordinateur de la taille d'une
carte de crédit et est disponible sous différente versions, la
dernière version en date est le Raspberry Pi 4, il offre une
augmentation sans précèdent de la vitesse du processeur, des
performances multimédias, de la mémoire et de la
connectivité par rapport à la génération
précédente du Raspberry Pi 3 model B +, tout en maintenant la
compatibilité avec les versions antérieures et
ETUDE E T CONCEPTION D U S Y S T E M E Page
|26
consommation électrique similaire. Comprend un
processeur 4 coeurs ainsi qu'une mémoire RAM pouvant aller de 2 à
8 GB.[20] Nous pouvons y installer un vrai système d'exploitation, comme
par exemple Raspbian, Ubuntu ou Windows IoT, qui nous permettent de faire
tourner la plupart des applications que nous utilisons sur nos ordinateurs
portables.
Le Raspberry pi possède également les avantages
et les inconvénients ; commençons par les avantages de cette
carte.
+ Avantage du Raspberry pi
> Le pi en lui-même possède Bluetooth, Wifi,
Ethernet, 4USB 2.0. C'est-à-dire, il est assez puissant pour fonctionner
comme un ordinateur personnel (mais pas assez puissant toutefois pour rivaliser
sérieusement au quotidien avec les ordinateurs de bureau dont on dispose
généralement aujourd'hui) ;
> Un très grand nombre d'utilisateurs
développent et partager sur Raspberry pi ; > Efficace dans les
applications logicielles ;
> Le Raspberry Pi est plus rapide en ce qui concerne la
vitesse d'horloge ;
> L'on peut inter changer les cartes SD pour essayer des
systèmes différents, ou le même mais optimisé pour
différentes utilisations ;
> Effectuer des processus multitâches il peut
exécuter plusieurs programmes en arrière-plan tant qu'il est
actif ;
> Le coût est abordable malgré les
performances.
+ Inconvénients du Raspberry
pi
> Raspberry ne possède pas de port analogique pour
le capteur du type analogique ; > Pas de capacité temps réel
;
> Peut-être endommagée en cas de
débranchement sans procédure d'arrêt correcte
préalable ;
> Les systèmes d'exploitation installés
doivent utiliser un serveur d'horloge pour se synchroniser ;
> Le cout est élevé par rapport aux
microcontrôleurs ;
> Le Pi n'est pas aussi flexible (la lecture de capteurs
analogiques nécessite une aide matérielle supplémentaire)
;
> Raspberry Pi pour la domotique, a un nombre
d'entrée/sorties faible.
ETUDE E T CONCEPTION D U S Y S T E M E Page
|27
? Caractéristiques
techniques[25]
Tableau 1.2 Caractéristiques technique de la carte
Raspberry pi
Nommage Description
Taille 85.60 mm* 53.98mm ;
Processeur 700 MHz ARM1176JZF-S
Core(ARM11) ;
Système sur puce(Soc) Broadcom BCM2835 ;
Processeur graphique Decodeur Broadcom VideoCore IV, API
logiciel video OpenGL ES 2.0,MPEG et VC-1, decodage video 1080p30
h.264/mpeg-4 AVC ;
Mémoire SDRAM 256Mo [Modèle A] ou 512
[Modèle B]
partagée avec le processeur graphique ;
Ports USB 2.0 1 [Modèle A] ou 2 [Modèle B]
Sortie vidéo RCA Composite (PAL et NTSC) HDMI
(rev 1.3 & 1.4) ;
Sortie audio 3.5 mm jack, HDMI ;
|
Unité de lecture-écriture de la carte
mémoire
|
SDHC/MMC/SDIO ;
|
Réseau 1 port réseau Fast Ethernet (10/100
Mbits/s), sur le [Modèle B] uniquement ;
Périphériques bas niveau 8*GPIO 1, UART, bus
I2C, bus SPI
Besoin alimentation En 5V via Micro USB ou GPIO1; 300
mA (1.5W); [Modèle A] ou 700 mA 3.5 W [Modèle
B]
2.7.3 Banana Pi
Le banana pi est un nano ordinateur de plateforme open source,
il prend en charge la fonction WI-FI dans sa version BPI-M3, le Banana Pi
tourne également sous plusieurs systèmes du monde libre tel que
Android, Debian, Ubuntu et Rasbian Image.
Il est dotée d'un processeur octa-core A83T ARM
cortex-A7 et d'un processeur graphique Power SGX544MP1 conforme à OpenGL
ES 2.0, 1.x, DX9.3 et une mémoire vive de 2Giga octet avec 733MHz ce qui
est un grand atout dans le traitement multimédia son processeur d'image
peut prendre en une interface un camera doter une grande résolution un
peu plus de 8 méga pixels et pour lire des vidéos de
capacité haute définition. Alimenter par 5V via un port micro
USB, le banana pi coute environ 100 dollars[26].
ETUDE E T CONCEPTION D U S Y S T E M E Page
|28
2.7.4 Technologie de transmission
Actuellement, il existe plusieurs technologie sans fils
notamment Lora, Zigbee, Wifi etc. nous allons étudier les
caractéristiques de ses technologies pour faire le choix.
a. LoRa
Tout d'abord LoRa signifie Long Rang qui est une technologie
de communication `à longue portée et à faible consommation
d''énergie qui utilise la bande de fréquence ISM6
L'objectif de cette technologie est de pouvoir augmenter la portée de
communication en minimisant la consommation 'énergétique des
systèmes communicants[27]. LoRa utilise la modulation CSS7
qui est basée sur l''étalement de spectre (une méthode de
transmission dans laquelle un signal est transmis sur une largeur spectrale
plus grande que l'ensemble des fréquences qui composent le signal
original)[28]. LoRaWAN est le protocole de communication sans fil mis au point
par l'association LoRa Alliance afin de répondre à
différents défis posés par la communication à
longue portée et à basse consommation dans les applications
IoT.
b. Zigbee
Qui est une technologie sans fil basée sur des normes
développée pour permettre des réseaux sans fil machine
à machine et internet des objets à faible coût ainsi que a
faible consommation. Il est destiné aux applications à faible
débit de données et à faible consommation et est un
standard ouvert. Cela permet logiquement de mélanger les
implémentations de différents fabricants, mais dans la pratique,
les produits Zigbee ont été étendus et
personnalisés par les fournisseurs et, par conséquent, en proie
à des problèmes d'interopérabilité[29].
A noter que cette technologie supporte des débits de
données beaucoup plus faibles et utilise un protocole de réseau
maillé pour éviter les périphériques concentrateurs
et créer une architecture d'autoréparation.
c. Wifi
Le Wi-Fi est une technologie attrayante pour de nombreuses
sociétés liées au monde des
télécommunications et d'Internet. Les collectivités
locales et surtout les particuliers profitent de la facilité
d'accès à Internet haut débit liée à cette
norme. Dans sa déclinaison la plus connue, 802.11 b, le Wi-Fi utilise la
bande de fréquence de 2,4 GHz et atteint un débit
théorique de 11 Mbits/s (contre 128, 512 Kbits/s ou 1 Mbits/s pour
l'ADSL), le 802.11a culmine à 22 Mbits/s et le 802.11 g, enfin, flirte
avec les 54 Mbits/s. Le Wi-Fi peut certes servir à surfer sur Internet,
mais pas seulement.
Il autorise l'organisation de réseaux -pourvus ou pas
d'Internet -pour échanger des fichiers, des données, et bien
entendu pour jouer. Ce ne sont là que quelques exemples de ses usages
possibles Les avantages des réseaux sans fil ne sont plus à
démontrer surtout
6 (Industrial, Scientific and Médical band).
7 (Chirp Spread Spectrum)
ETUDE E T CONCEPTION D U S Y S T E M E Page
|29
à une génération de plus en plus
habituée à la mobilité. La multiplication des appareils
(PDA, PC portables, terminaux et bientôt les téléphones
portables) capables de communiquer entre eux en fait le support idéal
des réseaux modernes[30].
Tableau 2 .3 Comparaison entre LoRa,Zigbee et WiFi
Caractéristiques LoRa Zigbee
Wi-Fi
|
Bande de fréquence 863 à 870 MHz,
902 à 928 MHz, 779 à 787 MHz
|
868MHz, 915MHz, 2450MHz
|
2,45 GHz et 5 GHz
|
|
Distance de
couverture
Consommation d'énergie
|
2-5 Km (zones urbaines), 15 Km (zones suburbaines)
Inférieur à celui de zigbee
|
10 à 100 mètre 250 m en extérieur
et 35 m en intérieur
prolonger 15 à 60 microwatts
selon la puissance de la bande passante
|
Application Utilisé comme Utilisé comme le
Utilisé comme
réseau entendue réseau personnel réseau
entendue
sans fil à faible
débit
2.7.5 Serveur d'application
Il existe différents serveurs entre autre Apache, Nginx,
Tomcat, Thingspeak etc.
a) Apache
Apache est un serveur web open-source et multiplateforme
(c'est à dire il fonctionne à la fois sur les serveurs Unix et
Windows) populaire qui est, selon les chiffres, le serveur web le plus
populaire qui existe. Il est activement maintenu par l'Apache Software
Foundation8.
Malgré que nous appelions Apache un serveur web, ce
n'est pas un serveur physique mais plutôt un logiciel qui
s'exécute sur un serveur. Son travail consiste à établir
une connexion entre un serveur et les navigateurs des visiteurs du site web tel
que, Google Chrome, Safari, etc... tout en fournissant des fichiers entre eux
(structure client-serveur)[31].
Avantage et inconvénients du serveur http Apache :
Parmi les avantages nous citons :
- Logiciel stable et fiable ;
- Sa mise à jours est régulier ;
- Fonctionne avec le site WordPress ; - Facile à
configurer
8 Organisation qui développe des logiciels open
source sous licence Apache
ETUDE E T CONCEPTION D U S Y S T E M E Page
|30
-
...
Parmi les inconvénients nous citons :
- Problème d'efficacité sur les sites web avec un
plusieurs trafic ;
- Beaucoup d'option de configuration qui peuvent aboutir à
la vulnérabilité de la
sécurité ;
- Ne possède pas une plateforme IoT ;
- Ne possède pas un tableau de bord de données ;
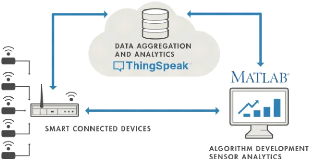
b) ThingSpeak
ThingSpeak est une plateforme qui fournit plusieurs services
destinés à la construction des applications IoT. Il offre la
capacité de collecter des données en temps réel,
visualiser les données collectées sous forme graphique, de
créer des plugins et des applications qui collabore avec des services
web, des réseaux sociaux. Thingspeak peut être
intégré aux plates formes arduino, Raspberry pi.
Voici quelques fonctions de ThingSpeak :
- API disponible;
- Collecte de données en temps réel :
- Traitement des données
- Données de géolocalisation :
- Visualisations de données ;
- Messages d'état de circuit[32]
Avantages et inconvénients du serveur ThingSpeak
Parmi les avantages nous décrivons :
- Possède déjà un tableau de données
;
- Possède une plateforme IoT ;
- L'utilisateur peut créer des applications
d'enregistrement de données capteurs;
Parmi les inconvénients nous décrivons
- Ne possède pas un serveur Web et d'applications; - Ne
possède pas un serveur Web.
ETUDE E T CONCEPTION D U S Y S T E M E Page
|31
Le capteur de température LM35 est capable de mesurer
des températures allant de -55°C à +150°C dans sa
version la plus précise et avec le montage adéquat, de quoi
mesurer
Figure 2.9 Architecture de la connectivité IOT avec
ThingSpeak[32] 2.7.6 Etude et Présentations des
capteurs
Avant de faire des détails sur cette partie nous tenons
à signaler que l'Homme et le chien sont quasi-identiques en terme en
termes de physiologie cardiaque. D'ailleurs un grand nombre d'études
fondamentales anatomiques et physiologiques sont effectuées sur le coeur
du chien, et extrapolées directement à l'Homme[25,p.32]. Et que
ces deux capteurs dont nous allons étudier sont destinés à
une utilisation didactique. Il est donc possible de ne pas obtenir de bons
résultats dans certaines conditions.
Dans notre travail il est question de contrôler
l'état sanitaire de l'animal et suivre l'emplacement réel de
celui-ci et pour que ces évènement puissent être
réalisé nous utiliserons les capteurs suivants :
a) Capteur de température corporelle

Figure 2.10 Capteur de température LM35[34]
Le capteur de température LM35 est un capteur
analogique de température. Il est beaucoup plus populaire en
électronique car il est moins cher, précis, très simple
à utiliser et d'une fiabilité à toute épreuve.
ETUDE E T CONCEPTION D U S Y S T E M E Page
|32
n'importe quelle température[35]. Il génère
une tension de sortie plus élevée que les thermocouples9
et ne peut exiger que la tension de sortie soit amplifiée.
Il a une tension de sortie est proportionnelle à la
température Celsius. Le facteur d'échelle est 0.1V/°C.
Le LM35 ne nécessite pas de calibration externe ou de
taille et maintient une précision de +/- 0.4 °C à
température ambiante et +/- 0.8 °C sur une plage de 0 °C
à + 100 °C.
Le capteur a une sensibilité de 10 mV /°C
Temperature (°C) * ????ut = (100°C/V)
Donc, si Vout est 1V, puis, la température = 100 °C
la tension de sortie varie linéairement avec la
température[36].
Avantages du capteur LM35
Parmi les avantages de ces capteurs, nous pouvons indiquer sa
consommation très faible (de l'ordre de 60 mA), d'où une
puissance dissipée également très faible, et sa
linéarité qui demeure excellente sur toute sa plage de
sensibilité.
Caractéristiques techniques
Le capteur LM35 comporte plusieurs caractéristiques dont
nous citons les plus importants :
> Alimentation : 5 VCC ;
> Plage de mesure : -55°C à +150°C ; >
Précision 0,5° C (+ 25 ° C).
> Dimensions : 30 * 20 mm ;
> Exécute 4 à 30 volts ;
> Sortie : S, VCC (5v), GND (masse) ; > Auto chauffage
faible, air 0.08°C ; > ...
9 Dispositif utilisé pour la mesure de
températures
b) ETUDE E T CONCEPTION D U S Y S T E M E Page
|33
Capteur de pulsation cardiaque
Le détecteur cardiaque est un appareil
électronique qui est utilisé pour mesurer la fréquence
cardiaque, c'est-à-dire la vitesse du rythme cardiaque.

Figure 2.11 Capteur de pulsation cardiaque
KY-039[37]
La fréquence cardiaque correspond au nombre de
battements du coeur pendant un laps de temps donné, en
générale une minute et elle varie sous l'impact de plusieurs
paramètres notamment : le sexe, l'âge, on estime que chez le chien
adulte ma fréquence cardiaque est comprise entre 70-180 BPM et chez le
chiot entre 70-220 BPM.
Branchement de câble
Gris = GND
Blanc = +V
Noir
= Signal
c) Présentation du module récepteur
GPS

Figure 2.9 Capteur GPS NEO-6M[38]
Notons que GPS utilise des signaux envoyés par les
satellites dans les stations spatiales et au sol de la Terre pour
déterminer avec précision sa position sur la Terre.
Le module récepteur GPS NEO-6M utilise la communication
USART10 pour communiquer avec le microcontrôleur ou le
terminal PC. Il reçoit des informations telles que la latitude, la
longitude, l'altitude, l'heure UTC, etc. des satellites sous forme de
chaîne
10 Puce qui facilite la communication via le port
série d un ordinateur en utilisant le protocole RS-232C
ETUDE E T CONCEPTION D U S Y S T E M E Page
|34
11 Un format de données standard pris en
charge par tous les fabricants de GPS, tout comme ASCII est la norme pour les
caractères informatiques.
NMEA11. Cette chaîne doit être
analysée pour extraire les informations que nous souhaitons
utiliser.[39]
Le récepteur GPS reçoit des signaux
d'information des satellites GPS et calcule sa distance par rapport aux
satellites. Cela se fait en mesurant le temps nécessaire au signal pour
voyager du satellite au récepteur. Ci-dessous voici comment ça
marche :
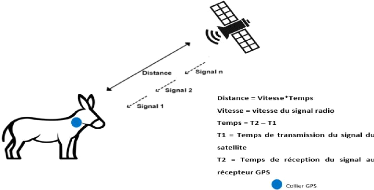
Figure 2.12 Calcul de distance GPS
Distance = speed * time
Où,
Vitesse = Vitesse du signal radio qui est approximativement
égale à la vitesse de la lumière, c'est-à-dire
3*108
Temps = Temps nécessaire pour qu'un signal voyage du
satellite au récepteur.
En soustrayant l'heure d'envoi de l'heure de réception,
nous pouvons déterminer le temps de trajet.
Pour déterminer la distance, le satellite et le
récepteur GPS génèrent simultanément le même
signal de pseudocode.
Le satellite transmet le pseudocode ; qui est reçu par le
récepteur GPS.
Ces deux signaux sont comparés et la différence
entre les signaux est le temps de trajet.
ETUDE E T CONCEPTION D U S Y S T E M E Page
|35
Maintenant, si le récepteur connaît la distance
de 3 satellites ou plus et leur emplacement (qui est envoyé par les
satellites), alors il peut calculer son emplacement en utilisant la
méthode de trilatération12[40] .
Description du brochage
GND : Terre ;
VCC : Alimentation 3,3 V - 6 V ;
TX : Transmettez des données en sérié qui
donnent des informations sur l'emplacement, l'heure, etc.
RX : Recevoir des données en série. Il est
requis lorsque nous voulons configurer le module GPS.
2.8 Solution retenue pour le choix du matériel et
logiciel
Apès avoir fait une étude comparative sur les
microcontrôleurs nous avons opté pour arduino Uno qui
répond le mieux à nos attentes sur les besoins fonctionnels, il
possède déjà le convertisseur analogique numérique
que la raspberry ne possède pas. Alors au lieu de chercher le module ADC
pour le relier a Raspberry nous jugions bon d'utiliser carrément arduino
pour connecter nos capteurs analogiques et les programmer :
Arduino est beaucoup plus temps réel, sa
particularité est qu'il a plus de ports d'entrée/sorties qui
fonctionnent sur 5 volts qui le rend aussi souple. Son filialisation de
développement IDE Arduino pour ensuite écrire un programme en C++
et nous pouvons l'envoyer sur l Arduino par un câble USB. L arduino est
généralement utilisé dans les projets électroniques
et de robotiques contrairement au raspberry pi qui est un miniordinateur et est
beaucoup plus puissant qu'un Arduino. Puisque il nécessite un Operating
system, la raspberry pi est souvent basée sur le software et il est
plutôt idéal pour faire un émulateur, serveur.
Concernant le choix de la technologie sans fil nous optons
pour la propagation libre dans laquelle nous retrouvons la technologie sans
fils LoRa, elle offre un service bien fiable, simple et sa portée est
encore plus élevée comparativement à la technologie Zigbee
et Wifi cité ci haut.
Nous signalons que le choix de la technologie LoRa doit
être utilisé dans la pratique au sein de la ferme espoir vu
qu'elle possède une longue portée comme nous l'avions
indiqué dans le tableau ci-dessous mais vu que nous ne possédons
pas ce module pour notre
12 Est une méthode mathématique
permettant de déterminer la position relative d'un point en utilisant la
géométrie des triangles tout comme la
triangulation. Mais contrairement à cette dernière, qui
utilise les angles et les distances pour positionner un point, la
trilatération utilise les distances entre un minimum de deux points de
référence.
ETUDE E T CONCEPTION D U S Y S T E M E Page
|36
implémentation, nous sommes amenés à
simuler avec le module Wi-Fi question de présenter la
démonstration.
Pour le choix de notre serveur, nous avons choisi ThingSpeak
parce qu'il est plus adapté pour le projet IoT13 et interagit
facilement avec les capteurs arduino et autre, il possède un tableau de
bord et il est facile à manipuler. Il est le mieux adapté pour
notre projet.
2.5 Conclusion partiel
Dans ce chapitre nous avons présenté d'une
manière accourci une vue d'ensemble du système par le
schéma bloc. Et sur base de cela, nous avons pu faire le choix des
composants convenables pour chaque bloc plus spécialement le choix
technologique que nous avons choisi pour Arduino qui va constituer le centre de
décisions que nous allons implémenter dans notre troisième
chapitre.
13 Internet des objets
IMPLEMENTATION E T MATERIALISATION D E L A
SOLUTION Page | 37
CHAPITRE 3 : IMPLEMENTATION ET MATERIALISATION DE LA
SOLUTION
3.1 Introduction partielle
Après avoir eu une idée générale
sur la conception du système, nous voici dans la partie la plus
importante de notre travail qui est intitulé «implémentation
et matérialisation de la solution ». Dans ce chapitre nous allons
expliquer les différentes étapes de la réalisation et de
l'implémentation de notre système. Aussi les différentes
configurations et installations seront expliquées dans le but d'amener
beaucoup plus de lumière en ce qui concerne le fonctionnement du
système du point de vue pratique. Nous pouvons noter que la
réalisation de ce système demande certain nombre de
prérequis, nous allons débuter par la vérification des
prérequis enfin de bien réaliser notre système.
3.2 Vérifications des prérequis
Pour la concrétisation de notre travail, il est
vraiment important de connaitre les équipements que nous aurons à
utiliser, entre autre : le capteur de température LM35, le capteur de
pouls ou rythme cardiaque KY-039, d'un module GPS, d'une carte arduino Uno,
d'un module Wifi, de petits câbles de connexion pour relier nos capteurs
a notre carte arduino, d'une plaque d essaie pour tester notre circuit
électronique ainsi que de résistance électronique.
3.3 Procédure d'installation
Avant de commencer à réaliser notre
système il est prioritaire d'avoir quelques logiciels qu vont nous
permettre de faire la programmation et aussi le test sur les outils.
Nous commencerons par l'installation de l'IDE arduino qui est
un environnement de programmation pour arduino et nous allons installer notre
serveur web pour configurer notre interface. Ce sont là les
différents logiciels qui seront utilisées pour la
réalisation de notre système. Alors commençons par le
premier logiciel.
3.3.1 Installation de l'IDE
arduino
Tout d'abord avant d'installer l'IDE arduino il faut le
télécharger, allez sur la page de téléchargement du
site officiel de l arduino. Le site est traduit en anglais, pour retrouver la
page de téléchargement, survolez l'onglet de navigation «
SOFTWARE », puis vous sélectionnez « DOWNLOADS » dans le
menu déroulant. Une fois sur la page de téléchargement,
recherchez la rubrique « Download the Arduino IDE ».
Cliquer sur le bouton qui correspond le mieux à la
version de votre système d'exploitation. Enfin valider le
téléchargement en cliquant sur « JUST DOWNLOAD ».
Une fois télécharger cliquer sur le fichier pour
commercer l'installation :
IMPLEMENTATION E T MATERIALISATION D E L A
SOLUTION Page | 38
Figure 3.1 Première étape pour l'installation
de Arduino
Suivez les instructions et assurez-vous que toutes les cases
sont cochées surtout celle du pilote USB
Figure 3.2 Installation pilotes USB arduino
Une fois que l'installation prend fin, une icône
apparaitra sur votre bureau dans ce cas double-cliqué dessus pour ouvrir
son interface.
IMPLEMENTATION E T MATERIALISATION D E L A
SOLUTION Page | 39
Figure 3.3 Interface de l'IDE Arduino
Rendez-vous dans «fichier » puis
«préférence » et assurer vous que les cases compilation
et télé versement sont cocher :

Figure 3.4 Configuration arduino
Ainsi, assurez-vous aussi que les pilotes qui vont permettre
la prise en charge de votre carte sont correctement installer en allant dans le
« gestionnaire de périphérique » pour voir si le COM et
LPT apparait.
3.3.2 Installation automatique des
bibliothèques
Tout d'abord, les bibliothèques qui en anglais veut
dire librairies sont des dossiers qui possèdent des fonctions permettant
de faciliter la programmation (des capteurs, des preactionneurs, modules des
communications et d'affichages,...) et l'utilisation d'un composant. En
générale elles comportent également des programmes
d'exemples, afin de mieux comprendre comment les utiliser, lors de leur
diffusion, dans les cas où le créateur décide de le
faire.
IMPLEMENTATION E T MATERIALISATION D E L A
SOLUTION Page | 40
Pour l'installation de nos bibliothèques : depuis l'IDE
Arduino, nous sommes allez dans le menu croquis/Inclure une
bibliothèque/ Gérer les bibliothèques...
Le Gestionnaire des bibliothèques apparait : il liste
l'ensemble de bibliothèques officielles. Alors pour en installer une, il
suffit de faire la recherche en utilisant le filtre puis cliquer sur
Installer
3.3.3 Installation de Proteus
Proteus est un simulateur qui nous permet de tester le montage
que nous aurons à faire afin de bien régler les
matériels.
Alors pour l'installer il suffit d'avoir le setup, ce dernier
doit être décompressé il comporte un fichier PDF qui
illustre la procédure d'installation.
Figure 3.5 Interface de Proteus
3.3.4 Procédure de
configuration
Pour notre serveur, avant de l'utiliser nous devons
procéder par les étapes suivantes :
? La première étape consiste à
crée un compte : Pour pouvoir télécharger les
données sur ThingSpeak à des fins d'analyse et de traitement ;
? Etape 2 : Créer un nouveau canal, le but ici est de
saisir les détails du nouveau canal créé. Par exemple,
vous pouvez utiliser le nom du projet sur lequel vous travaillez comme nom du
canal. Les champs reflètent les données que vous allez
télécharger. Par exemple, si vous mesurez la température
de la pièce, vous pouvez définir le champ 1 comme
Température de l'objet. À l'issue de cette opération,
cliquez sur Enregistrer le canal ;
? Etape 3 : Recherche de la clé API ;
? Etape 4 : Programme de plateforme Arduino.
IMPLEMENTATION E T MATERIALISATION D E L A
SOLUTION Page | 41
3.4 Mise en place du système et
assemblage
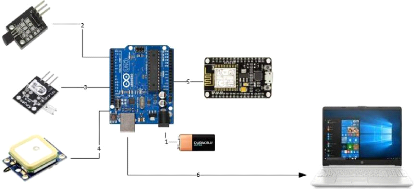
Figure 3.5 Eléments du système

Figure 3.6 Nomination des câbles
2.5 Evaluation des durées des mises en
places
Tableau 3.2 Evaluation des installations et
configurations
Taches Description Durée en Durée
en
minutes heures
|
A Installation de
l'IDE arduino
B Ajout des
bibliothèques
C Installation de
proteus
D Configuration
de l'IDE
C Configuration
de proteus
|
10 0.16
5 0.8
15 0.25
5 0.08
10 0.16
|
E Sketch arduino 90 1.5
IMPLEMENTATION E T MATERIALISATION D E L A
SOLUTION Page | 42
|
F
G
|
Montage proteus
Téléversement du sketch
|
30
5
|
0.5
0.08
|
|
|
|
|
|
Taches
|
Description
|
Durée minutes
|
en Durée en
heures
|
|
H
|
Simulation sous proteus
|
30
|
0.5
|
|
I
|
Montage et
connexion des matériels
|
150
|
2.5
|
|
J
|
Création de
compte
|
45
|
0.75
|
|
Thinkspeak
|
|
|
|
K
|
Test
|
2000
|
33
|
|
L
|
Montage du
système
|
3500
|
58
|
|
Total
|
|
5395
|
89.9
|
L'évaluation de la durée de mise en place de
notre projet est estime à pratiquement 4 jours maximum à
condition que tous les matériels soient à notre bonne
disposition.
2.6 Evaluation du cout du système
Tableau 3.2 Evaluations des prix matériels
|
Matériels
|
Prix unitaire
|
Nombre
|
Prix Total
|
|
(USD)
|
|
(USD)
|
|
Arduino Uno
|
20
|
1
|
20
|
|
KY-039
|
8
|
1
|
8
|
|
LM35
|
8
|
1
|
8
|
|
Module GPS
|
20
|
1
|
20
|
|
ES8266 Module
|
15
|
1
|
15
|
|
Jumpers
|
5
|
2
|
10
|
|
Résistance
|
0.25
|
2
|
0.50
|
|
BreadBoard
|
1
|
1
|
1
|
|
Total
|
----
|
----
|
82.5 USD
|
2.7 Test de configuration
Dans cette partie nous allons montrer quelques parties de
notre système pour enfin les regrouper pour le teste.
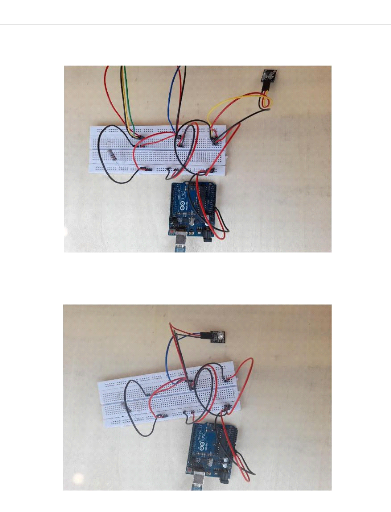
IMPLEMENTATION E T MATERIALISATION D E L A
SOLUTION Page | 43
Voici quelques étapes :
Figure 3.7 ·Partie de détection de la
température
Figure 3.8 Partie de détection du rythme
cardiaque
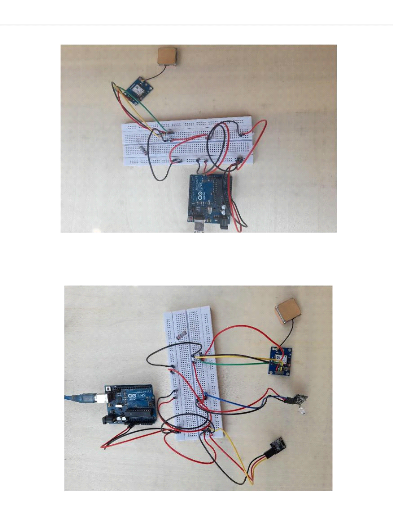
IMPLEMENTATION E T MATERIALISATION D E L A
SOLUTION Page | 44
Figure 3.9 Partie détecteur de localisation
Figure 3.9 Assemblage des trois capteurs
IMPLEMENTATION E T MATERIALISATION D E L A
SOLUTION Page | 45

Figure 3.10 Tableau de bord
2.8 Evaluation des besoins
Apres implémentations de la solution, nous
procèderons à la vérification de besoins qui
régissent notre projet.
Besoin fonctionnels
+ Le système prélever la température
corporel de l'animal ; + Le système de récupérer le rythme
cardiaque de l'animal ; + Le système est parvenu à localiser
l'animal ;
+ Le système offre un tableau de bord (afficheur) pour
visualiser les valeurs.
Sur ceux nous pouvons estimer que les besoins fonctionnels ont
été résolus en grande partie.
Les besoins non fonctionnel
En plus de besoins fonctionnels, notre système respecte
les critères suivants :
+ Le cout du système est très abordable moins de
150 USD pour l'acquisition de tous les modules du système ;
+ Le système est rapidité il réagit suivant
les contraintes temporelles;
+ La crédibilité du système est digne de
confiance;
+ Le système est fiabilité et
disponibilité : le système est opérationnel et fonctionne
correctement dans les temps impartis pour permettre aux éleveurs et
vétérinaire de faire un bon suivi ;
+ Le système est Simple;
IMPLEMENTATION E T MATERIALISATION D E L A
SOLUTION Page | 46
? Le système est à mesure de prendre aussi en
charge des nouvelles fonctionnalités ; ? Le système est mono
tache lors de l'exécution.
2.9 Conclusion partielle
Au cours de ce chapitre, nous avons décrit les
différentes étapes important de l'implémentation de notre
système y compris également la présentation de
l'environnement logiciel pour la réalisation du système. Comme
nous l'avions bien indiqué, notre système offrira la
possibilité au fermier, vétérinaire ainsi que le
propriétaire de l'animal de surveiller l'état de santé
à distance ce dernier mais aussi de suivre le déplacement ou
savoir exactement où se trouve l'espèce via l'ordinateur.
CONCLUSION GENERALE Page | 47
ANNEXES Page | 48
CONCLUSION GENERALE
Ce travail est intitule «Etude et mise en place d'un
système de surveillance de l'état de santé et localisation
des animaux » est une étude de conception d'un système
embarqué pouvant permettre le bon contrôle sanitaire et de
déplacement des animaux en veillant sur les éléments
indispensable tel que la température corporel, le rythme cardiaque ainsi
que la localisation.
Nous pouvons noter que plusieurs solutions peuvent entrer en
jeux dans le but de diminuer les contaminations des maladies, aggravations des
maladies, les taux de mortalités ainsi que la perte des animaux dans une
ferme d'élevage. Pour ce qui concerne notre cas, nous avons
proposé une solution informatique permettant à l'éleveur
d'avoir accès à toutes les informations qui concerne
l'état de santé de l'animal via un ordinateur. Il est important
de noter que le système doit au moins répondre à certain
nombre des critères tels que la simplicité d'utilisation, la
rapidité mais aussi le cout d'implémentation qui est moindre.
Ce travail a été généralement la
pratique des notions théoriques apprises notamment la programmation et
les systèmes embarqués. Ce projet nous a permis d'approfondir les
notions du système embarqué mais aussi une initiation sur
l'internet des objets.
Vous l'aurez bien constaté que ce travail offre
plusieurs ouvertures dans le domaine de l'informatique, tout en espérant
que ce travail servira de guide a tous ceux qui voudrons bien travailler dans
le domaine du système embarqué voir même internet des
objets.
Ainsi tous suggestions et remarques dans le but
d'améliorer ce système pourront être les bienvenues et nous
sommes persuadés que les critiques nous ferons évoluer d'une
bonne manière.
Perspectives d'avenir
Notre travail n'étant pas bon ni parfait, nous prenons
le temps de le critiqué, de présenter ses limites et d'en
proposer les améliorations futurs.
? Par manque des ressources nous sommes obligé de faire
des simulations avec des capteurs non appropries et technologies sans fil non
appropries
? La prochaine étape c'est à dire le
système à venir doit aboutir à un système qui
signale le fermier au cas où l'animal quitte sa zone bien précise
;
? Le système à venir doit être capable de
bien analyser la température et le rythme cardiaque mêmes
l'animale est en mouvement c'est à dire en course ou lorsque l'animale
est en état de stresse.
ANNEXES
Extraits de codes
#include "ThingSpeak.h" #include <ESP8266WiFi.h> Const int
LM35 = A0;
// Entrez vos détails Wi-Fi //
char ssid[ ] = "ANIMAL"
; //SSID
char ssid [ ] = "ANIMALS" ; // Mot de passe
// //
Client Wifi ;
non signé long myChannelNumber = 000000 ; // Channel ID
ici
Const int FieldNumber = 1 ;
const char * myWriteAPIKey = "ZZZZZZZZZZZZZZ" ; // Votre
clé API d'écriture
ici
void setup ()
{
Serial.begin( 115200 );
WiFi.mode(WIFI_STA);
ThingSpeak.begin(client);
}
void loop ()
{
if (WiFi.status() != WL_CONNECTED)
{
Serial.print( "Tentative de connexion au SSID : " );
Serial.println(ssid);
while (WiFi.status() != WL_CONNECTED)
{
WiFi.begin(ssid, pass);
ANNEXES Page | 49
Serial.print( "." );
retard( 5000 );
}
Serial.println( "\nConnecté." );
}
entier ADC ;
température flottante ;
CAN = lecture analogique (LM35); /* Lecture de la
température */
temp = (ADC * 3 ); /* Convertir la valeur adc en tension
équivalente */
temp = (temp / 10 ); /* LM35 donne une sortie de 10mv/°C
*/
Serial.print( "Temperature = " );
Serial.print(temp);
Serial.println( " *C" );
retard (1000 );
ThingSpeak.writeField(myChannelNumber, FieldNumber, temp,
myWriteAPIKey);
retard ( 1000 );
}
#include <SoftwareSerial.h>
#define DEBUG true
SoftwareSerial esp8266(9,10);
#include <LiquidCrystal.h>
#include <stdlib.h>
#define SSID "Your Wifi Name" // "SSID-WiFiname"
#define PASS "Your Wifi Password" // "password"
#define IP
"184.106.153.149"//
thingspeak.com ip
String msg = "GET /update?key=9YS21NU0HY5YS1IKU"; //change it
with your api key like "GET /update?key=Your Api Key"
void updatebeat(){
ANNEXES Page | 50
String cmd = "AT+CIPSTART=\"TCP\",\"";
cmd += IP;
cmd += "\",80";
Serial.println(cmd);
esp8266.println(cmd);
delay(2000);
if(esp8266.find("Error")){
return;
}
cmd = msg ;
cmd += "&field1=";
cmd += BPM;
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
#include "ThingSpeak.h"
#include <ESP8266WiFi.h>
static const int RXPin = 4, TXPin = 5;
statique const uint32_t GPSBaud = 9600 ;
flottant latitude , longitude;
Chaîne lat_str , lng_str;
const char* ssid = "Animal";
const char* mot de passe = "244466666" ;
myChannelNumber long non signé = 991048 ;
const char * myWriteAPIKey = "RX9R15V8GH3941CK";
// L'objet
TinyGPS ++ TinyGPSPlus gps;
Client WiFi ;
// La connexion série au périphérique
GPS
ANNEXES Page | 51
SoftwareSerial ss(RXPin, TXPin);
Serial.begin(115200);
ss.begin(GPSbaud);
Serial.print("Connexion à ");
Serial.println(ssid);
WiFi.begin(ssid, mot de passe);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connecté");
Serial.println("Adresse IP : ");
Serial.println(WiFi.localIP());
Serial.print("Masque de réseau : ");
Serial.println(WiFi.subnetMask());
Serial.print("Passerelle : ");
Serial.println(WiFi.gatewayIP());
ThingSpeak.begin(client);
}
Veuillez noter que les différents parties du code
illustrées sont les plus important.
REFERENCES P a g e | 52
REFERENCES
[1] wikipedia, « Approches ascendante et descendante
», Wikipédia. août 06, 2020. Consulté le:
juill. 15, 2021. [En ligne]. Disponible sur:
https://fr.wikipedia.org/w/index.php?title=Approches_ascendante_et_descendante&
oldid=173602591
[2] Kumwimba Daudet Kalenga, « Memoire Online - Analyse et
optimisation de la fiabilité d'un réseau par la technologie PPPOE
du routeur OS Mikrotik - Kumwimba Daudet Kalenga », Memoire
Online.
https://www.memoireonline.com/03/12/5503/m_Analyse-et-optimisation-de-la-fiabilite-dun-reseau-par-la-technologie-PPPOE-du-routeur-OS-Mikro2.html
(consulté le juin 14, 2021).
[3] « Ferme Espoir - Tourisme Katanga ».
https://www.katanga-tourisme.org/ferme-espoir/
(consulté le juill. 17, 2021).
[4] « Parc animalier - Ferme - FERME ESPOIR - Ferme Espoir
»,
www.petitfute.com.
https://www.petitfute.com/v71655-ferme-espoir/c1173-visites-points-d-interet/c917-parc-animalier-aquarium/c921-parc-animalier-ferme/1541099-ferme-espoir.html
(consulté le août 06, 2021).
[5] « Le bien-être animal, qu'est-ce que c'est? |
Ministère de l'Agriculture et de l'Alimentation ».
https://agriculture.gouv.fr/le-bien-etre-animal-quest-ce-que-cest
(consulté le sept. 12, 2021).
[6] Vert-Togo, « Avec le PPAAO-TOGO, les mortalités
dans les élevages des petits ruminants réduites », VERT
TOGO | Au coeur de l'information, déc. 24, 2019.
https://vert-togo.com/avec-le-ppaao-togo-les-mortalites-dans-les-elevages-des-petits-ruminants-reduites/
(consulté le sept. 27, 2021).
[7] Aurélie et Anne-Sophie BARRIER, «
ÉVALUATION ET CONSEILS D'OPTIMISATION DU BIEN-ÊTRE EN
ÉLEVAGE CANIN », ÉCOLE NATIONALE VÉTÉRINAIRE
D'ALFORT.
[8] T. Independent, « Five districts in Northern Uganda
operating without substantive veterinary officers », The Independent
Uganda:, sept. 21, 2020.
https://www.independent.co.ug/five-districts-in-northern-uganda-operating-without-substantive-veterinary-officers/
(consulté le sept. 27, 2021).
[9] « Livestock Pedigree & Tracking », Avante
International Technology, Inc.
https://www.avantetech.com/products/locating/livestock/
(consulté le oct. 06, 2021).
[10] « Cameroun: la Banque mondiale débloque 60
milliards Fcfa pour l'élevage », La Tribune.
https://afrique.latribune.fr/afrique-centrale/cameroun/2018-02-09/cameroun-la-banque-mondiale-debloque-60-milliards-fcfa-pour-l-elevage-767824.html
(consulté le sept. 27, 2021).
[11] OMAMBO OKITO Aslem, « Implementation d'un
système de prise de presence baséée sur la technologie
RFID », ESIS.
[12] MUKENDI KATOLU Alain, « Etude et mise en place d'un
systeme de securite residentielle contre les bandits a bas de l'alarme gsm en
Rdc », ESIS, 2019.
[13] Mr. Djaouti aghilas & Mr. Mechaour hamid, «
Conception et réalisation d'une centrale domotique »,
Université Mouloud Mammeri de Tizi-Ouzou.
[14]
REFERENCES P a g e | 53
TSHIMANGA MATAMBA Ygains, « Analyse fonctionnelle d un
systeme de telegestion d un transformateur electrique dans un reseau CPL
», UNIVERSITE LIBERTE, 2018.
[15] P.MUKANDA, Cours de microprocesseur. ESIS,
2018.
[16] SUZE WA SUZE Gloire, « MISE EN PLACE D UN SYSTEME
TEMPS REEL DE DETECTION D INCENDIE », ESIS, 2018.
[17] Mr Mekdad.A et Mr Zenasni.H, « Conception et
réalisation d'un régulateur de Température »,
2004.
[18] DJEBLI ASSIA & BEZZA FATNA, « Conception ,
simulation et réalisation d'un détecteur de pulsation cardiaque
couplé à un thermomètre électronique »,
UNIVERSITE DE SAÏDA DR MOULAY TAHAR.
[19] « Arduino Uno : Avantages, inconvénients,
utilisation et fonctionnement », Arduino France, févr. 01,
2019.
https://www.arduino-france.com/review/arduino-uno/
(consulté le août 21, 2021).
[20] KYUNGU NGOIE Philippe, « MISE EN PLACE D'UN
SYSTÈME PERMETTANT D'AMELIORER LA PRODUCTION DE POULETS DE CHAIR «
Cas d'un poulailler industriel» », ESIS.
[21] NGOY BANZA, « Système de gestion des sources
électriques à distance dans la domotique », ESIS, 2018.
[22] D. M. Matthews, « Arduino Nano: Avantages et
inconvénients - JCA Informatique ».
http://www.jca-informatique.com/arduino-nano-avantages-et-inconvenients/
(consulté le août 21, 2021).
[23] technolab, « Description de la Carte Arduino UNO
». 2017.
[24] T. R. P. Foundation, « Buy a Raspberry Pi 3 Model B
», Raspberry Pi.
https://www.raspberrypi.org/products/raspberry-pi-3-model-b/
(consulté le août 22, 2021).
[25] HAMID HAMOUCHI, « Conception et réalisation
d'un ecentrale embarquée de la domotique " Maison intelligente " »,
2015.
[26] OMAMBO OKITO Aslem, « Implementation d un systeme de
prise de presence basee sur la technologie RFID Cas de la GECAMINE SA »,
ESIS, 2018.
[27] Taoufik BOUGUERA, « Capteur Communicant Autonome en
Énergie pour l'IoT », UNIVERSITE DE NANTES, 2019.
[28] ALEX MOUAPI, « PRÉDICTION ET GESTION DE
L'ÉNERGIE DANS UN RÉSEAU DE CAPTEURS SANS FIL RÉCOLTEURS
D'ÉNERGIE VIBRATOIRE POUR LES APPLICATIONS INDUSTRIELLES DE L'INTERNET
DES OBJETS », Université du Québec, 2021.
[29] « What is Zigbee? - Definition from
WhatIs.com », IoT
Agenda.
https://internetofthingsagenda.techtarget.com/definition/ZigBee
(consulté le sept. 12, 2021).
[30] Cedrick KADIMA KALALA, « Mise en place sur le point
d'accès d'un réseau wifi », Institut supérieur
d'informatique programmation et d'analyse (ISIPA), Kinshasa, 2010.
[31] « Qu'est ce qu'Apache? Une description complète
du Serveur Web Apache », Hostinger Tutoriels, août 29,
2018.
https://www.hostinger.fr/tutoriels/quest-ce-quapache-serveur-web-apache/
(consulté le sept. 13, 2021).
[32] « ThingSpeak, plate-forme gratuite pour l'Internet des
objets (IoT) ».
https://www.rs-online.com/designspark/thingspeak-a-free-internet-of-things-iot-platform
(consulté le sept. 13, 2021).
[33]
REFERENCES P a g e | 54
Andréas BACHELEZ, « ETUDE BIBLIOGRAPHIQUE DES MODELES
EXPERIMENTAUX CANINS EN CARDIOLOGIE COMPAREE », ECOLE NATIONALE
VETERINAIRE DE LYON, 2005.
[34] « LM35 Temperature Sensor LM35DZ - OKY3066-2 - OKYSTAR
».
https://www.okystar.com/product-item/lm35-temperature-sensor-lm35dz-oky3066-2/
(consulté le sept. 13, 2021).
[35] F. Batteix, « Mesurer une température avec un
capteur LM35 et une carte Arduino / Genuino »,
!-APP.SHORT_TITLE-!, mars 26, 2016.
https://www.carnetdumaker.net/articles/mesurer-une-temperature-avec-un-capteur-lm35-et-une-carte-arduino-genuino/
(consulté le août 09, 2021).
[36] Mr Benouaden Abderraouf, « conception d'un
thermomètre électronique à base d'un capteur de chaleur,
un PIC, et un afficheur LCD ».
[37] « Capteur de fréquence cardiaque à
détection des doigts KY-039 », Elektronica Voor Jou.
https://elektronicavoorjou.nl/fr/Les-produits/capteur-de-fr%C3%A9quence-cardiaque-ky-039/
(consulté le sept. 13, 2021).
[38] « Ublox NEO-6M GPS Module - Senith Electronics
».
http://www.senith.lk/shop/item/1121/ublox-neo-6m-gps-module
(consulté le sept. 13, 2021).
[39] ElectronicWings, « GPS Module Interfacing with
Particle Photon. | Particle Photon ».
https://www.electronicwings.com/particle/gps-module-interfacing-with-particle-photon
(consulté le août 19, 2021).
[40] ElectronicWings, « GPS Receiver Module | Sensors &
Modules ».
https://www.electronicwings.com/sensors-modules/gps-receiver-module
(consulté le août 19, 2021).
| 

