VI.2.Programmation des modes de fonctionnement :
Nous avons programmé sous Delphi 7 les fonctions des
sept modes de fonctionnement de l'EGPWS. Pour chaque mode nous avons
établi un organigramme défini selon le principe de son
fonctionnement.
IV.2.1. Les organigrammes des modes de l'EGPWS :
Dans cette partie nous présentons les organigrammes des
sept modes de fonctionnement de l'EGPWS
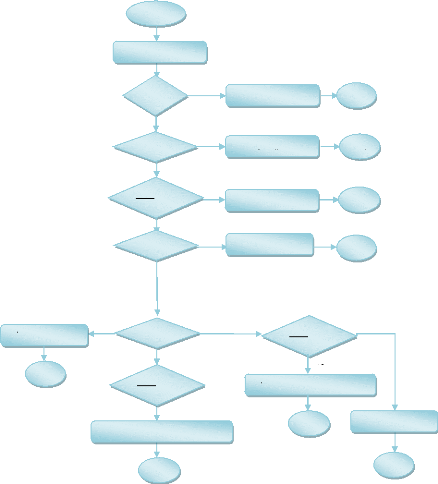
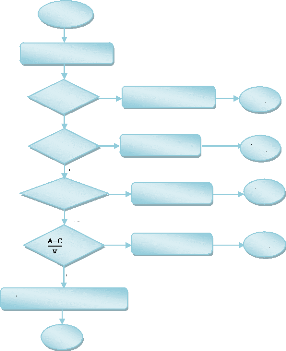
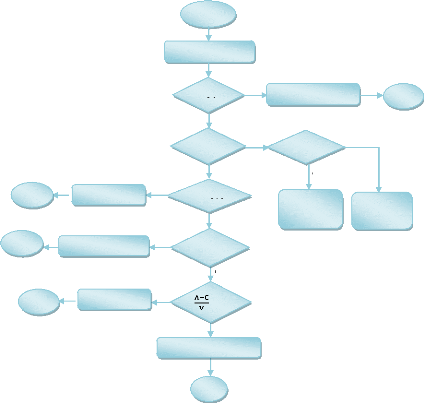
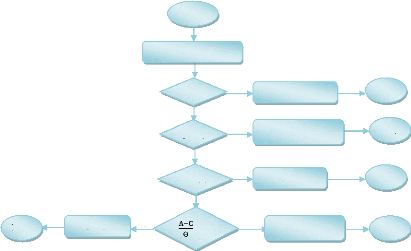
1. Les mode 1 : lorsque l'avion enregistre une
pente de descente excessive, deux messages sont entendus et affichés
selon le degré du danger (Fig IV.1).
- le message <<Sink Rate>> sera entendu et
l'indicateur <<Pull Up >> s'allumera si l'avion entre dans la
première zone d'avertissement.
- Le message <<Whoop Whoop Pull Up >> sera entendu et
l'indicateur <<Pull Up >> s'allumera si la situation devient plus
dangereuse.
Début
Introduire A et V
A<10
Oui
Inhibit System
FIN
Non
V<1000
Oui
No Alarm
FIN
Non
A-Cl Oui
>P1 No Alarm
V
FIN
Non
Oui
V<1500 "Sink Rate"
FIN
Non
"Sink Rate"
Oui
V<1710
Oui
A-
>P2
V
Non Non
Oui
FIN
A-
V
>P2
"Whoop Whoop Pull Up"
Non
FIN
"Sink Rate"
"Whoop Whoop Pull Up"
FIN
FIN
Figure IV.1: organigramme du mode 1.
Les constantes utilisées :
A : Altitude (Pieds).
V : Vitesse verticale (Pieds /Min).
P1 : Première pente, P2 : Deuxième pente, P3 :
Troisième pente.
C1, , C3 : constantes qui correspondent à P1, P2 et P3
lorsque A=0. P1= 0.61 min, P2=1.03 min, P3=0.41 min.
C1= - 600 Pieds, = -1535Pieds, C3= - 483Pieds.
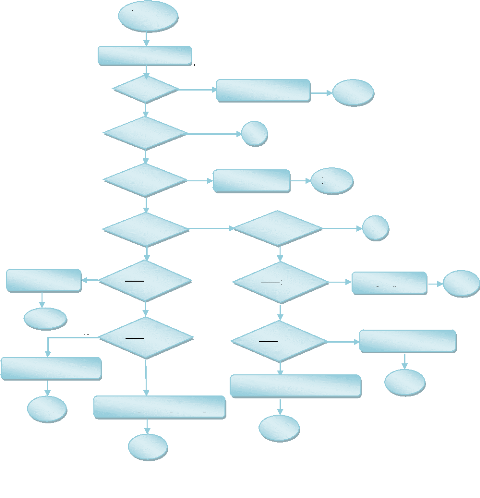
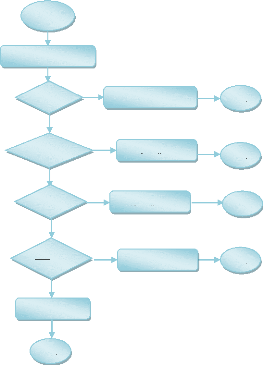
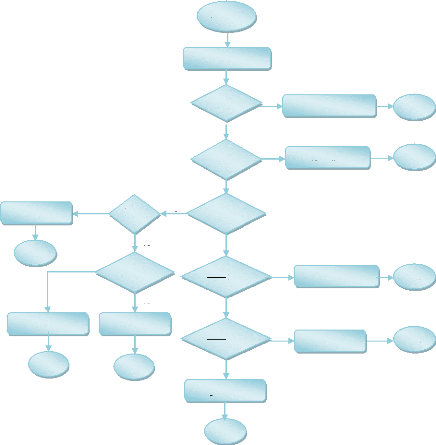
2. Le mode 2:lorsque l'avion enregitre un taux
de descente au terrain excessif, deux sous modes sont définis selon la
configuration de l'avion :
Début
Introduire A et V
Oui
A<30
Inhibit System
FIN
Non
Non
A<1650 1
Oui
Oui
V<2000 No Alarm
FIN
Non
Non Non
V<3250 V<375O 2
Oui
Oui
No Alarm
Non
A-Cl
V
>P1
A-
V
>P2
Non
No Alarm
FIN
Oui
Oui
FIN
Non
A-
V
>P2
A-
V
>P2
Non
"Terrain Terrain"
"Terrain Terrain"
Oui
"Whoop Whoop Pull Up"
Oui
FIN
FIN
"Whoop Whoop Pull Up"
FIN
FIN
38
a. Le sous mode 2A : lorsque l'avion n'est
pas dans la configuration d'atterrissage (Volets moins que 30 unités),
un message auditif << Terrain Terrain>> sera entendu, si le taux
d'approche augmente l'alerte sera changée par un avertissement et le
message auditif par <<Whoop Whoop Pull Up >>. (Fig. IV.2)
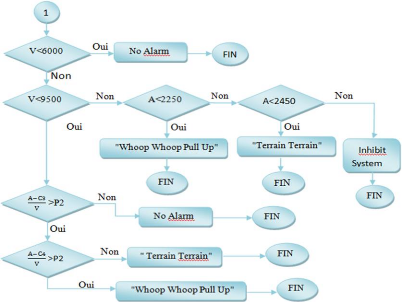
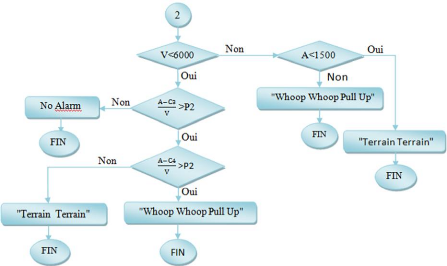
Figure IV.2 : Organigramme du sous mode 2A.
Les constantes utilisées :
A : Altitude.
V : Vitesse.
P1, P2 : Pentes.
C1, : Constantes qui correspondent à P1 lorsque A=0.
C3, C4 : Constantes qui correspondent à P2 lorsque A=0. P1= 0.93 Min,
P2= 0.22 Min.
C1= -1530 Pieds, = -1920 Pieds, C3= 352 Pieds, C4= 132 Pieds.
b. Le sous mode 2B : lorsque l'avion est dans la
configuration d'atterrissage (plus de 30 unités) un message d'alerte
sera entendu << Terrain Terrain », ce dernier se transformera en
avertissement si le taux d'approche augmente et le message auditif sera
<<Whoop Whoop Pull Up ». (Fig IV.3).
"Whoop Whoop Pull Up"
Début
Introduire A et V
Oui
A<30 Inhibit System
Oui
V<2253 No Alarm
Non
A<789 No Alarm
FIN
Non
>P No Alarm
Oui
Non
Non
Oui
FIN
FIN
FIN
FIN
Figure IV.3 : Organigramme du sous mode 2B.
Les constantes utilisées :
A : Altitude. V : Vitesse. P1: Pente.
C : Constante qui correspondent à P lorsque A=0. P= 0.95
Min, C= 1962 Pieds.
3. Le mode 3 : les alarmes du mode 3 se
produisent lorsqu'il ya une perte d'altitude après décollage, on
distingue deux sous modes:
a. Le sous mode 3A : il donne le message
auditif «Don't Sink» lorsque l'avion perd l'altitude après
décollage et cette perte dépend du taux
d'élévation. (Fig IV.4).
Introduire A et Ai
"Don't Sink"
A> 1500
Début
??? Non
?? >P No Alarm
Oui
A<30 Inhibit System
Oui
Ai<20 No Alarm
FIN
Non
Non
Oui
Non
Oui
No Alarm
FIN
FIN
FIN
FIN
Figure IV.4 : Organigramme du sous mode 3A.
Les constantes utilisées :
Ai : Altitude inertielle.
A : Altitude.
P : Pente.
C : Constante qui correspond à P lorsque A=0. P=14.7, C= -
264 Pieds.
b. Le sous mode 3B : il donne le message
auditif « Too Low Terrain» lorsque l'altitude de l'avion est
élevée pendant le décollage avec un dégagement
minimum du terrain. (Fig. IV.5).
Introduire A et Ai
Début
FIN
Oui
A<30 Inhibit System
Non
FIN
Oui
A<150 No Alarm
Non
FIN
Oui
A<375 "Too Low Terrain"
Non
FIN
V<190 Oui No Alarm
Non
>P
Oui Oui
???
V<250
?
Non Non
No Alarm
Non
A<700
No Alarm
"Too Low Terrain"
Oui
FIN
"Too Low Terrain"
FIN
FIN
FIN
Figure IV.5 : Organigramme du mode 3B.
Les constantes utilisées :
V : Vitesse.
A : Altitude.
P= 5.41 Pieds/Noeuds. C= 652 Pieds.
4. Le mode 4 : il donne les alertes lorsque
l'avion est proche du sol, on distingue deux sous modes selon la configuration
de l'avion :
a. Le sous mode 4A : le message auditif
« Too Low Terrain» sera entendu lorsque les trains ne sont pas dans
la configuration d'atterrissage (trains entrants) et la vitesse de l'avion est
basse. (Fig IV.6).
Début
Introduire A et V
Oui
A<30 Inhibit System
FIN
Non
Oui
A<30 V<500
Non
Non
Oui
Non Non
A<1000
V<275
"Too Low Gear"
"Too Low Terrain"
Oui
Oui
No
Alarm
"Too Low Terrain"
FIN FIN
Non
>P
No Alarm
FIN
FIN
FIN
Oui
"Too Low Terrain"
FIN
Figure IV.6 : Organigramme du sous mode 4A.
Les constantes utilisées :
V : Vitesse.
A : Altitude.
P= 5.55 Pieds/Noeuds. C= - 526.25 Pieds.
b. Le sous mode 4B : il donne le message
auditif « Too Low Flaps» lorsque les trains sont sortants, les volets
ne sont pas dans la configuration d'atterrissage et la vitesse
anémométrique est faible (Fig. IV.7).
Début
Introduire A et V
A<30
Oui
Inhibit System
FIN
Non
Oui
A<245 V<159
Non
Oui
Non
FIN
No Alarm
Non
A<1000
Oui
"Too Low Flaps"
"Too Low Terrain"
FIN
Too Low Terrain
Non
V<275
Oui
Non
FIN
No Alarm
>P
Oui
"Too Low Terrain"
FIN
Figure IV.7 : Organigramme du mode 4B.
Les constantes utilisées :
V : Vitesse.
A : Altitude.
P= 7.1 Pieds/Noeuds. C= - 820 Pieds.
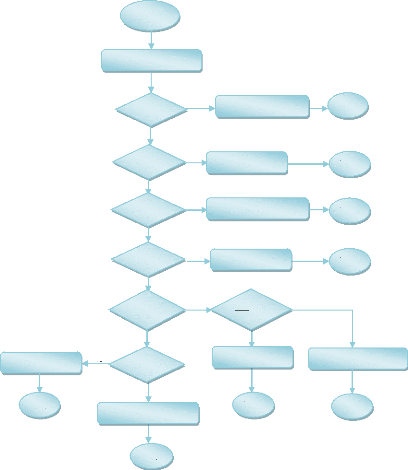
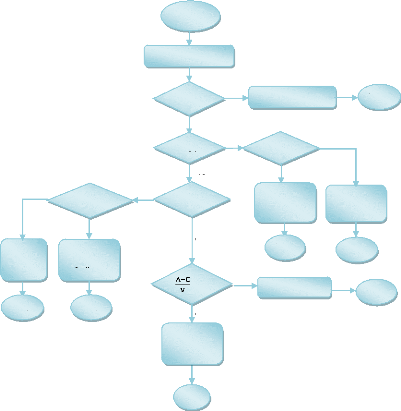
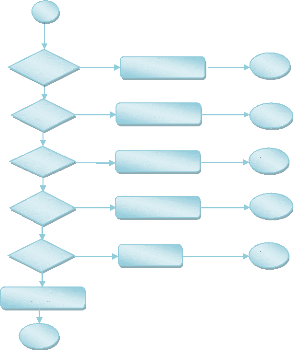
5. Le mode 5 : les alertes du mode 5 sont
données lorsque l'avion engage son atterrissage au dessous du Glide
Slope. L'EGPWC donne un message auditif «Glide Slope », le volume de
ce dernier change selon le danger. (Fig. IV.8).
Début
Introduire A et D
A<30
Oui
Inhibit System
FIN
Non
D<1.3
Oui No Alarm
FIN
Non
"Low G/S"
Oui
D<2
Non
A<150
FIN
Non
Oui
Oui
A<300
A-Cl
>P1
Non
No Alarm
FIN
F)
Non
Oui
"Speed G/S"
"Low G/S"
A- Non
F) >P2 "Low G/S"
FIN
Oui
FIN
FIN
"Speed G/S"
FIN
Figure IV.8 : Organigramme du mode 5.
Les constantes utilisées :
D : Déviation du Glide Slope (Dots). A : Altitude.
P1= -57 Pieds/Dots, P2= - 92 Pieds/Dots. C1= 224 Pieds, = 334
Pieds.
A=2500
Oui
"Twenty Five Hundrer"
FIN
Non
Introduire A et X
Début
A=1000
Oui
"One Thousand"
FIN
Non
A-X=100
Oui
"Plus Hundred"
FIN
Non
A-X=80
Oui
"Approching Minimum"
FIN
Non
Oui
A-X=0 " Minimum Minimum"
FIN
Non
Oui
A=500 " Five Hundred"
FIN
Non
Oui
A=400 " Four Hundred"
FIN
Non
A=300
Non
Oui
Oui
" Three Hundred"
FIN
A=200 " Two Hundred"
FIN
Non
Oui
A=100 " One Hundred"
FIN
Non
46
1
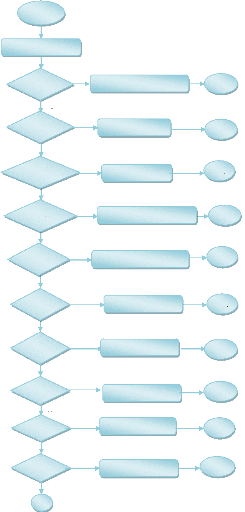
6. Le mode 6 : le mode 6 fournit des messages
lorsque l'avion se rapproche de la valeur minimum que le pilote a
insérée. L'EGPWC donne des messages auditifs qui consistent
à indiquer le nombre de pieds restant et cela à partir de 2500
pieds (Fig. IV.9).
No Alarm
A=10
Oui
A=50 " Fifty"
A=30 " Theerty"
A=20
FIN
Oui
A=40 " Fourty"
1
Non
Non
Non
Non
Oui
Oui
Oui
" Twenty"
" Ten"
FIN
FIN
FIN
FIN
FIN
Figure IV.9 : Organigramme du mode 6.
Les constantes utilisées :
X : Hauteur de décision (Pieds). A : Altitude (Pieds).
- Bank Angle: les faibles angles d'attaque du
mode 6 se produisent quand l'angle d'attaque de l'avion est à plus de 10
degrés, le message auditif donné est «Bank Angle Bank Angle
». (Fig. IV.10)
FIN
No Alarm
Non
Introduire A et ?
A>150
Début
? <10
Non
? <40
>P
Oui
Non
Oui
Non
Oui
Oui
No Alarm
No Alarm
"Bank Angle"
"Bank Angle"
FIN
FIN
FIN
FIN
Figure IV.10 : Organigramme du mode 6 (Bank
Angle).
Les constantes utilisées :
? : Angle de roulis (degrés). A : Altitude.
P= 4 Pieds/Degrés, C= -10 Pieds.
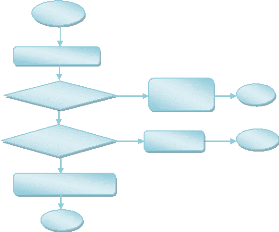
7. Le mode 7 : il donne un message auditif et
visuel « Windshear » lorsque il ya un vent cisaillant qui risque de
pousser l'avion verticalement vers la terre lors du décollage ou de
l'atterrissage. (Fig. IV.11).
Introduire V et a
Windshear Warning
V-(P*a)>c2
V-(P*a)>c1
Début
FIN
Non
Non
Oui
Oui
No Alarm
Windshear Caution
FIN
FIN
Figure IV.11 : Organigramme du mode 7.
Les constantes utilisées :
V : Vitesse (Pied/Min).
a : accélération.
P1= P2 = P = -750 UI.
C1= 1500 Pieds/Min, = -1500 Pieds/Min.
| 
