III.1. Les modes de fonctionnements de l'EGPWS :
L'EGPWS est un système qui fournit à
l'équipage des indications sonores et visuelles lorsque les conditions
du vol peuvent impliquer un risque de collision avec le sol. Le système
surveille automatiquement et en permanence la trajectoire de vol de l'avion par
rapport au terrain à toutes les altitudes comprises entre 10 et 2450
pieds. Il utilise les sorties des systèmes fournissant la radio
altitude, vitesse de l'air, le Mach, la position des trains d'atterrissage, la
position des volets, et la hauteur de décision DH. Les diverses
conditions dangereuses qui peuvent être rencontrées en vol sont
divisés en sept modes [1]. Ce sont :
- Mode 1 : Pente de descente excessive;
- Mode 2 : Taux d'approche excessif ;
- Mode 3 : Perte d'altitude après décollage ;
- Mode 4 : Proximité du sol avec les trains d'atterrissage
entrants ou les volets entrants; - Mode 5 : Descente au-dessous du glide
slope;
- Mode 6 : Descente au-dessous du minimum;
- Mode7 : Avertir pour condition windshear.
Et de deux fonctions importantes qui sont :
- Le TCF (Terrain Clearence Floor); - Le TA (Terrain
Awarness).
III.2.Mode 1 : Perte de descente excessive:
Le mode 1 fournit au pilote des alertes et des avertissements
pour de grands taux de descente quand l'avion est près du terrain. Ce
mode dépend de l'altitude et du taux barométrique, et il est
indépendant de la configuration de l'avion dépasse 10 pieds. Si
l'avion entre dans la première zone d'avertissement indiquant une perte
d'altitude excessive, le message << Sink Rate >> sera entendu et
l'indication <<Pull Up>> s'allumera. Si le taux de descente n'est
pas rectifié, l'avion entrera dans la deuxième zone d'alerte, et
le message <<Sink Rate >> sera changé par l'avertissement
<< Whoop Whoop, Pull Up >> et l'indication
<<Pull Up >> étant toujours allumée
(Fig. III.1).
Dans ce cas, la situation devient plus dangereuse et le pilote
doit impérativement corriger la trajectoire. A une altitude
inférieure à 10 pieds, toutes les alarmes du mode 1 sont
invalides.
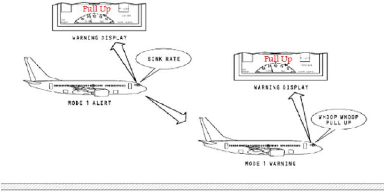
Figure III.1 : Mode 1 (Pente de descente
excessive).
Les alarmes du mode 1 seront entendues pour une radio altitude
de 10 jusqu'à 2450 pieds. Le types d'alarme dépens du taux de
descente et de la radio altitude. La première alarme est une alerte. Si
le taux de descente ne change pas, le pilote aura un avertissement. Les LRU
(Line Replaveable Unit) fournissent les entrées du mode 1 par:
- Les émetteurs et récepteurs de radio
altimètre ;
- L'ADIRU (Air Data Inertial Référence Unit)
Le système EGPWS emploie les données reçues
par les LRU pour détecter les alertes et les avertissements du mode 1.
Ces données sont (Fig. III.2) :
- La radio altitude (RA) ;
- La vitesse verticale inertielle (IVS) ;
- Le taux barométrique d'altitude.
Le détecteur de mode EGPWC calcule le taux de descente
en utilisant la vitesse verticale inertielle. Si elle n'est pas disponible, le
détecteur de mode fait appel au taux d'altitude intérieurement
calculé. Si les deux données ne sont pas valides, le taux
d'altitude barométrique de l'ADIRU est utilisé.
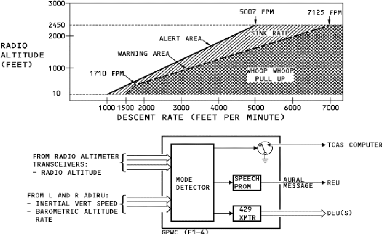
Figure III.2 : Principe de fonctionnement du
mode 1.
| 
