2.3.5. Modèles physico-conceptuels
spatialisés
Pour tenter de dépasser les limites de chacune des
approches précédentes et des types de modèles
correspondants (modèles statistiques trop empiriques, modèles
à réservoirs trop peu réalistes, modèles
théoriques trop complexes), il apparaît nécessaire de
déboucher sur une modélisation hydrologique qui soit à la
fois (Ambroise et al., 1982) :
i. "fonctionnelle", c'est-à-dire fondée sur des
processus réels, en tirant partie des acquis théoriques pour le
choix des variables et paramètres pertinents, tout en simplifiant les
modèles correspondants pour les rendre opérationnels ;
ii. "spatialisée", c'est-à-dire fondée
sur un découpage de l'espace en unités de fonctionnement
relativement homogènes. L'objectif est ainsi de tirer partie des
méthodes naturalistes pour définir la structure hydrologique du
bassin, la variabilité interne de ses propriétés, et donc
intégrer la dimension spatiale dans les modèles.
De tels modèles hydrologiques spatialisés devraient
sans doute être de type mixte :
i. déterministe dans leur représentation
simplifiée des processus en jeu ;
ii. stochastique dans leur paramétrisation et leur
application, pour tenir compte dans les simulations de l'incertitude
inévitable sur les paramètres et les variables
d'entrées.
A titre d'exemple, il est possible de citer les modèles
ALHTAÏR (Ayral, 2005), MARINE (Estupina-Borrel et Dartus, 2003) ou encore
TOPODYN (Datin, 1999) ainsi que la plateforme de modélisation MERCEDES
(Bouvier et al., 1994). Ces modèles "conceptuels
spatialisés" ont été développés en vue de
travailler sur la prévision des crues et notamment des crues
éclaires. Les modèles globaux, dont font partie les
réseaux de neurones formels, sont utilisés dans ce présent
mémoire pour la modélisation pluie-débit. Sur quel
principe se basent ces modèles ? Quels sont les types d'incertitudes qui
apparaissent au cours de l'utilisation de ces modèles ? Ces deux
préoccupations trouvent leur réponse dans la section suivante.
2.4. PRINCIPES DE BASE ET INCERTITUDES
LIÉES AUX MODÈLES GLOBAUX La majorité des
modèles globaux fonctionne selon le principe décrit à la
figure 15. Les variables d'entrée du modèle,
encore appelées variables de forçage sont le plus souvent des
mesures de pluie (P), de température (T) et des estimations de
l'évapotranspiration potentielle (ETP). Les variables de sortie sont
généralement les débits (Q). Le modèle
dépend des variables d'état qui traduisent les
caractéristiques du système modélisé (par exemple
le taux de saturation en eau du sol, la profondeur de sol, la pente, etc.) et
des paramètres représentant
des caractéristiques du bassin qui n'ont pas toujours
d'interprétation physique (Gaume, 2004). La figure 15
met également en évidence, de façon simplifiée, le
processus de calage d'un modèle pluie-débit global. A partir des
variables explicatives utilisées comme entrée, les
paramètres du modèle sont ajustés afin d'obtenir une
simulation ou une prévision de débit la plus proche possible de
la chronique des débits observés ou mesurés.
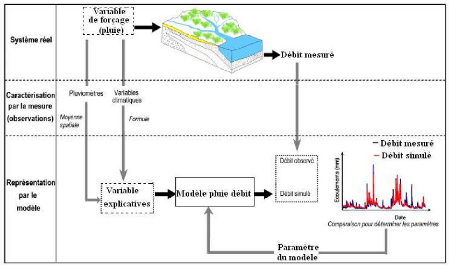
Figure 15 : Principe de
fonctionnement des modèles globaux Pluie-débit
Les différentes sources d'incertitudes existant en
modélisation pluie-débit sont représentées sur la
figure 15. Au-delà des incertitudes liées
à la structure du modèle qui n'est qu'une représentation
approximative de la réalité, il existe d'autres incertitudes
liées aux observations : la pluie qui tombe effectivement sur le bassin
versant n'étant pas celle qui est estimée à partir des
mesures des appareils (pluviographe, pluviomètre, etc.). Les
incertitudes liées aux entrées du modèle peuvent donc
conduire à des incertitudes sur les débits simulés mais
aussi sur le jeu de paramètres du modèle.
| 

