1.4.2 Modèle non linéaire
Par conséquent, l'hypothèse de processus ARMA
stationnaire ne per-met pas de prendre en compte d'une part les
mécanisme d'asymétrie et d'autre part les rupture de forte
amplitude. D'oñ la nécessite d'aller vers des
modélisations non linéaires. L'espérance conditionnelle E
(Xt/Zt_1) est la meilleurs approximation au sens de l'erreur quadratique
moyenne de t par une fonction des valeurs passés. Il existe une
infinité de processus non linéaire susceptible de
représenter les propriétés des séries
financières. Compbell, Lo et Mackinlay [1997] ont proposé le
cadre suivant pour décrire un processus non linéaire :
Xt = g ( t-1, t-2,...) + h ( t-1, t-2,...)
on la fonction g(.) correspondant a la moyenne conditionnelle
du processus X et on la fonction h(.) correspondant a un coefficient de
proportionnalité entre X et le choc t cela permet de
classifier les processus non linéaire en deux parties :
1) Processus non linéaire en moyenne pour lesquelles g(.)
est non linéaire.
2) Processus non linéaire en variance pour lesquelles
h(.)est non linéaire.
Cette classification permet de regrouper la plupart de
modèles non linéaire. Dans ce domaine le papier de Engle [1982]
<< Autoregressive Conditional Heteroskedasticity with Estimates of the
variance of UK inflation -Economica->> a ouvert la voie a la
modélisation ARCH et a ses nombreux développements. C'est
précisément sur cette voie que mon document portera par
l'essentiel. Mais avant cela, on va présenter un modèle non
linéaire portant proche des modèles ARCH.
Modèle BL <<Granger et Anderson [1978]>>
Les modèles bilinéaires présente la
particularité d'être a la fois linéaire en X et mais de ne
pas d'être a ces deux variables prise conjointement. Un modèle BL
d'ordre, noté par le signe BL (p, q, P, Q), s'écrit ainsi sous la
forme :
Xt = , + X p cbiXt_ + X q j t-j + XP X Q ~ijXt~i tj
(1.1)
i=1 j=0 i=1 j=1
|
'y (h) =
|
~ 2 + A2E (X2 ) .2 si h = 0
t_2
0 si h ~
|
1
|
avec 0 = 1, (cp, q, APi, AiQ ) E *4, V
(i, i) et on €t désigne un bruit blanc éventuellement
gaussien, c'est a dire un bruit blanc fort, cette l'hypothése assure
l'existance de la variance. Certain des processus bilinéaires ont des
proprietés proches de celles des modèles ARCH que nous
étudions dans ce document.
Exemple 1.4.1 Comsidéroms um cas particulier de processus
BL (0, 0, 2, 1) de type:
Xt = €t + A Xt_2 €t_ (1.2)
on A E et €t est identiquement indépendante
distribué (0, cr2). Ce
processus est centré, puisque le bruit est
indépendant du passé (donc coy (€t_1,Xt_2) = 0),
E (Xt) = E (€t) + A E (Xt_2 €t-1)
= E (€t) + A E (Xt_2) E (€t-1) = 0.
Sa fonction de d'autocovariance est donné par:
'y (h) = E (Xt Xt_h)
= E [(€t + AXt_2 €t-1) (€t--h + AXt_2_h
€t_1_h)] = E (€t €t--h) + A2E (Xt_2 €t--i Xt_2_h
€t_1_h) +AE (Xt_2 €t-1€t--h) + AE (Xt_2_h €t-1--h
€t)
pour h > 1, il n'apparait aucun terme en €2 t_h et
puisque l'opérateur espérance est linéaire, la fonction 'y
(h) est par conséquant nulle. En revanche, pour h = 0, on a :
'y (0) = E (€2 ) + A2E (X2 )
) E (€2
t t_2 t_1
= a2 + A2E (X2 ) a2
t2
Ainsi la fonction générale d'autocovariance
s'écrit :
La variance marginale de ce processus est V (Xi) = 2
1_A2a2. Tl existe
une solution stationnaire du seconde ordre de
l'équation (1.2) a condition A2cr2 < 1.
Paralelement, la variance conditionnelle du processus X se dérive
directement a partir de l'équation (1.2) :
]
V (Xt/Xt_2) = 2 [1 + A2X2 t_2
La variance conditionnel le du processus X dépend des
valeurs passées de ce processus. On retrouve un effet de type ARCH. Ceci
illustre le fait que plusieurs modélisations non linéaires
peuvent être envisagées si l'on souhaite modéliser la
dynamique dans la volatilité conditionnelle.
Exemple 1.4.2 On vérifie sur le graphique (1.1) que le
modêle BL BL(0, 0, 2, 1) avec A = 0.2 est capable de
générer des cluster de volatilité comme ceux
observés sur données financiêres.
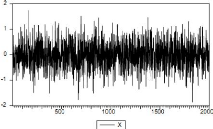
Figure 1.1 : Simulation d'un processus
BL(O,O,2,1).
Modèles TAR
Les modèles autorégressifs a seuil ou TAR ont
été proposés par Tong [1978]. Tlles a introduits comme des
approximations discrètes des modèles non linéaires. Tls
permettent de reproduire des phénomènes tels qu'un cycle
limite.
Supposons que le processus Yt vérifie au temps t une
équation parmi plusieurs équations différente selon la
valeur d'une variable (autre que Yt).

Chaque equation correspond a un regime. Dans le cas d'un seuil
unique et d'une variable Xt,
Exemple 1.4.3 Considérons le cas de modeles AR (1) avec
un seuil unique
{0(1)Xt-i + Et, si Xt_i < a
Xt =
Tong a considers l'existance de plusieurs seuils. La variable
Xt, est une variable exogene, soit une variable (Yt) retardée (Yt_d).
Dans ce dernier cas, on parlera eventuellement de modele SETAR. Il est a noter
que les bruits Et et nt sont independants et peuvent etre de
variance differente.
0(2)Xt-1 + Et, si Xt_1 > a
avec le même bruit. Une condition nécessaire et
suc/cante d'existence d'une solution stationnaire et 0(1) < 1,
0(2) < 1 et 0(1)0(2) < 1.
La série ci-dessous correspond a une simulation de la
série
--0.2 Xt_1 + Et, si Xt_i < 1
Xt =
0.9 Xt_1 + Et, si Xt_i > 1
avec un bruit blanc gaussien, centré réduit,
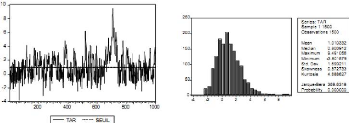
Figure 1.2 : Simulation de processus TAR.
Ce type de processus, la aussi, permet d'avoir des queues de
distribution plus épaisses (en l'occurence ici pour les fortes valeurs
de Yt - queue a droite).
Er 1 01) Xt_z + Et, si Xt < a
{ Xt
Yt =
r 4
2)Xt
_
i +
n
t, si > a
Une écriture équivalente du modèle a seuil a
deux régimes, avec un seul reatard, ou une seule variable exogène
( Xt ou Yt_i), est la suivante
Y=
+
0
(2)Xt
_
i + si Xt >
a,
{
6 .1 #177; 01) Xt_i #177;
Et, Si Xt <
cela équivalent a
Yt = (81 + 0(1)Xt-i 1 lixt<a
+ (82 + 0(2)Xt-i 1 lixt>a + ut,
on (ut) est une séquence de bruits indépendants,
dont la variance est de la forme
V (ut) = cr,21Ext<a +
o-2,71Ext>a.
Les modeles SETAR
Toutefois, dans cette classe de modèles, les travaux
ont dans leur trés grande majorité portè sur la
sous-classe des processus TAR et tout particulièrement celle des SETAR
certainement en raison de moindres dificultés d'estimation. Ainsi, un
SETAR a un seul changement de régime aura pour écriture :
61 + Er 1 0(1) Xt--i €it, si Xt_d < ~
Xt = 2
+ (2)
i Xt~i + E2t, si Xt_d > ~
et plus généralement, un SETAR (K, p1,..., pk, d)
s'écrira :
|
Xt =
|
XK
k=1
|
+
|
Pk
i=i
|
),01°) iXt--i + Ekt x E (Xt-d E
Rt)
|
on
{1 si Xt_d < ~
lit =
0 si Xt_d > a
Exemple 1.4.4 La Figure représente le graphique des
données simulées provenant du modèle AR (1) et du
modèle SETAR. Il s'agit de modèles simulés avec
200 observations et avec les paramètres suivants :
- pour le modèle AR (1) : Xt = 0:5 Xt_i + Et
- pour le modèle SETAR : Xt = -- 0.3Xt_1 (1 -- + Et
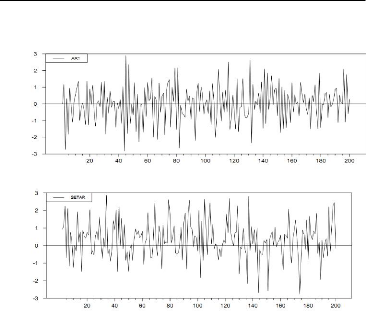
Figure 1.3 : Comparaison entre le processus AR et SETAR.
Exemple 1.4.5 Si on fait une analyse visuelle des deux
graphiques, on constate que le pattern de ces deux modéles est
différent. Une première différence est l'échelle
des valeurs simulées qui est plus grande pour le modéle AR (1).
Une deuxiéme différence vise la moyenne et la variance de la
variable dépendante des modéles. L'analyse descriptive
présentée au Tableau suivant permet de constater que la moyenne
du modéle AR (1) est trés proche de zéro et plus petite
que celle le modéle SETAR, mais sa variance est plus grande que celle du
modéle SETAR. Les valeurs de skewness et d'excés de kurtosis
permettent de rejeter l'hypothése de normalité pour les deux
modéles.
|
AR(1)
|
SETAR
|
|
Moyenne
|
0.0483*
|
0.4069*
|
|
Variance
|
1.8619*
|
1.0854*
|
|
Skewness
|
-0.1607*
|
0.3703*
|
|
Kurtosis(Exc.)
|
-0.2268*
|
-0.0043*
|
Table 4.1 : Analyse descriptive pour les modéle AR (1) et
SETAR.
Note : *indique que les tests sont significatifs a un niveau de
con/lance de 95%.
| 

