II-3-5. Dimensionnement des régulateurs
a) Régulateur de courant
Les équations de découplage proposées
permettent d'exprimer les résultats suivants :
T.p)
s
ds + ó
R . (1 .
s
T.p)
s
qs + ó
R . (1 .
s
Nous présentons les retards du convertisseur statique
(onduleur MLI) et les blocs de conversion par la fonction de transfert suivante
[6,16,17]
F(p)
(II-11)
1
+
Tf.p1
Pour chacune des boucles de courant, nous avons adopté un
régulateur
|
? 1
PI k 1
? j
? + j d, q
?
?? ?? =
? ? p.T
? j ?
|
?
?
? ?
|
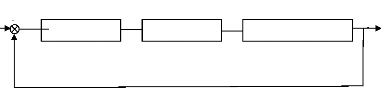
Le schéma incluant les différentes fonctions de
transfert, pour l'axe q est :
*
+ -
I
qs
Kq(1+1/Tq.p
Vqs *
(1/(Tf.p+ 1)
(1/Rs)/(ó Ts.p+1)
I
qs
Fig II-6. Boucle de régulation du courant
Iqs
La fonction de transfert en boucle ouverte s'écrit
maintenant comme suit :

1
1 +
1
1
T .p
q
.
FTBO=
.
(II-12)
ó
K
q
1 +
1 +
R
s
T .p
s
T .p
f
T .p
q

Pour déterminer les paramètres du régulateur
PI, on fait appel à la méthode du pole dominant :
T q = ó T s ; D'où:
K
FTBO = .
q
R s
(II-13)
1
ó s + f
T (1 T .p)
La fonction de transfert en boucle fermée devient :

. = 2
0
ù (II-14)
K
p
1
2
1
2 + +
2 p
2T f
q
p + 2 î . ù + ù 2
0 0
.Tf
R .T
s s
ó
K q
FTBF
s
ó
R . T.
.T f
s


1 s s q
R . ó .T ; ù 0 = K
Avec : î=
2 K .T R . T .T
ó
q f s s f

Lors d'un échelon de consigne pour un amortissement
î=1/ 2
Cr
-
K R ó
ó .T .L
=
s s
qs 2 .T
=
2 .T f f
Tq=ó.Ts , Tf=2ms
b) Régulateur de vitesse
Le schéma de régulation en cascade
nécessite, pour un bon fonctionnement, que la boucle interne courant
soit plus rapide que la boucle externe.
La chaîne de régulation de la vitesse peut
être représentée par le schéma fonctionnel suivant :
Fig. II-7
Ùr


Ùref
-
Gfi


1
I qs *
)
T.p
v
K (1
v +
Kt
Ce
Fig II-7. Boucle de régulation de la
vitesse
3M
Ö * r
K = p .
r
t L
2
L a fonction de transfert en boucle ouverte est donnée par
la relation :
|
FTBO
|
K.
v
|
1 T .p
+ v
|
|
1
|
|
K t
|
, avec Gfi = 0 (II-15)
|
|
T.p
v
|
.
|
f
|
.
|
1 T .p
+ m
|
En appliquant la méthode du pole dominant, on aura :
T v = Tm = J/f;
|
FTBO v t
K .K
= .
f
|
1
|
(II-16)
|
|
T .p
m
|
En boucle fermée, on aura :
|
FTBF
|
1+
|
1 Tm
|
.p
|
(II-17)
|
|
KK/ f
v t
|
|
|
On prend généralement : Tr = 50.
ô = 3. Tm .
|
f
|
|
|
K v .K
|
t
|

j
3.
=
K
D'où
(II-18)
t
v 50 . .K
ô
Ör


c) Régulation du flux rotorique
Le schéma bloc de la régulation du flux rotorique
est représenté par la figure II-8. La boucle interne de courant
Ids est négligée.

Ör *
-
KÖ(1+1/pTÔ)
M/(1+pTr)
Fig II-8. Boucle de régulation du flux
rotorique
En appliquant la méthode du pôle dominant, on
aura
L
T Ö = T = d'ou
r
rR
M
G0 K .
= Ö(II-19) pTÖ
r
En boucle fermée, on aura
|
Gf Ö
|
=
|
1+
|
p
|
1
TÖ
|
(II-20)
|
|
|
K M
Ö
|
|

On prend
KÖ = 3 T Ö M.t r Ö
(II-21)
| 
