II-4. Simulation
II-4-1. Schéma de simulation de la commande
indirecte alimentée en tension Le schéma bloc de
simulation est représenté par la figure (II-9)
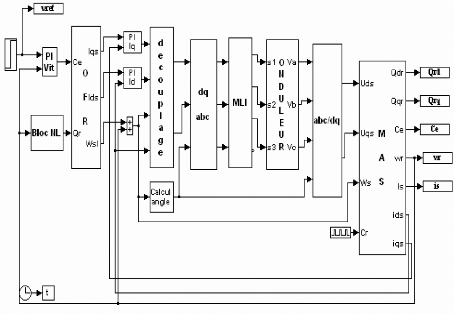
Fig II-9. Schéma de simulation de la
commande vectorielle d'une MAS associée à un
Onduleur de
tension
II-4-2. Résultats et interprétation des
résultats de simulations
Les résultats de la figure II-10 montrent clairement que
l'orientation du flux rotorique est maintenue après l'application de la
charge ( *
Ö dr = Ö r ; Ö qr = 0).
Le couple Ce suit le courant Iqs, et le
flux Ö r suit le courant Ids.
Le courant statorique, au démarrage fait appel à un
courant important, il augmente proportionnellement à la charge.
Le découplage flux-couple est maintenu quelque soit la
variation de la charge.
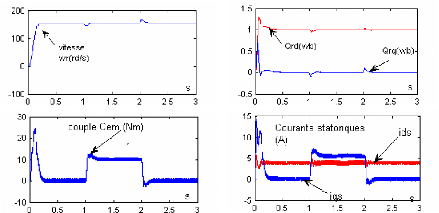
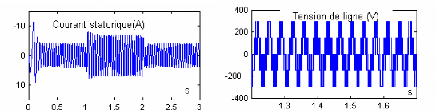
Fig II-10. Résultats de simulation de la
commande vectorielle indirecte d'une MAS
associée à un
onduleur de tension à MLI avec charge
II-5. Conclusion
Ce chapitre nous a permis de présenter la commande
vectorielle de la machine asynchrone alimentée en tension par
orientation du flux rotorique
Les schémas de commande montrent l'utilisation des
boucles de courant qui permettent de prendre en compte la dynamique du stator,
cependant la réalisation de cette structure est très complexe.
Nous constatons à travers cette commande que les
performances dépendent des correcteurs qui sont dimensionnés
à base du principe du pôle dominant. Les résultats sont
satisfaisants tant que le système est invariant.
Cette technique de commande suppose que la connaissance de la
position du flux est exacte. Dans le chapitre suivant nous ferons appel
à la commande non linéaire qui fait abstraction à la
position du flux.
| 
