CHAPITRE III
COMMANDE NON LINEAIRE DE LA
MACHINE ASYNCHRONE
CHAPITRE III: COMMANDE NON LINEAIRE DE LA
MACHINE ASYNCHRONE
III-1. Introduction
Dans ce chapitre nous présentons quelques rappels sur
la linéarisation pour des systèmes non linéaires. Ce
principe permet le développement d'une commande non linéaire pour
le contrôle du couple et du flux en tenant compte d'une limitation de
courant. Il permet entre autre de découpler parfaitement le flux et le
couple de la machine.
Cette méthode à été
développée par Fliess (1982) [18] et elle est
présentée dans sa forme actuelle en temps continu dans Isodori
(1989) [19].
Nous rappellerons les techniques de commande non linéaire
qui font recours à la géométrie différentielle pour
linéariser le comportement entrée/sortie d'un système non
linéaire.
Nous présentons les lois de commande non linéaire
relative aux systèmes mono variables SISO (Single Input Single
Output) et multi-variables MIMO (Multi Input Multi Output).
Enfin, nous appliquerons ces techniques à la commande
de la machine asynchrone alimentée en tension, et on termine notre
chapitre par des simulations qui illustrent le comportement de la commande non
linéaire.
III-2. Système mono entrée mono sortie
(S.I.S.O) Considérons le modèle non linéaire de
la forme suivante :
& = +
( ? ) = x f (x) g(x) .u
(III-1)
y h(x)
=
Ou n
x ? Ret f(x), g(x), h(x) sont des fonctions dérivables.
Le but de l'application de la méthode de
linéarisation est de trouver une commande de type retour d'état
non linéaire.
u = á(x) + â (x).v (III-2)
Qui en boucle fermée ramène le système
(Ó) non linéaire à un système linéaire (Fig
III-1) par rapport à une linéarisation autour d'un point de
fonctionnement, ceci permet d'obtenir un comportement linéaire du
système sur toute « la plage de fonctionnement » [20,
21,22].
Deux cas peuvent se présenter :
É Le degré relatif (i.e. le nombre de fois qu'il
faut dériver la sortie y pour faire apparaître l'entrée u)
est égal à l'ordre n du système.Le système peut
donc être linéarisé exactement.
É Le degré relatif est strictement inférieur
à l'ordre du système, le système est partiellement
découplé.
Pour définir les conditions de linéarisation on
doit d'abord définir les notions de dérivée de Lie et de
crochet de Lie.
- Dérivée de Lie
La dérivée de Lie d'une fonction h(x) le long d'un
champ de vecteurs
f(x) = (f1(x),f2(x),f3(x), ,f
n (x) t est donnée par :
|
n ? h
L h(x) i
f ?= ?
= f
i 1 i
x
|
(
|
x)
|
(III-3)
|
|
- Crochet de Lie
Le crochet de Lie de f(x) et de g(x) est le champ de vecteur
défini par :
n n
? g(x) ? f (x)
[ ]
f, g = ? = ? =
f (x) - g (x) L g (x) L f(x)
i f g
= -
1
x i 1 i
? x
i 1 i
?
|
(III-4)
|
Afin de définir la loi de commande non linéaire
nous calculons le degré relatif de la sortie :
? h ? h
y= x = ?x? x
[f(x) g(x)u]
+
& & (III-5)
L'équation devient :
& y = L f h(x) + L g h (x)u (III-6)
Si L g h(x) ? 0 n
? x ? R , on montre aisément que la commande :
|
1
u =
L h
g
|
(
|
x)
|
( L h(x) v)
- +
f
|
(III-7)
|
Conduit au système linéaire représentant un
simple intégrateur
& y=v (III-8)
Si Lgh(x) = 0, on continue la dérivation pour
obtenir
y L h(x) L L i 1 h(x) .u
i = + i=1,2,... (III-9)
i -
f g f
Avec L L i 1 h(x) 0
g f ?
- . La méthode consiste donc à déterminer
le degré de dérivation ä
à partir duquel le coefficient multiplicateur de la
commande `u' (L L i 1 h(x))
- n'est pas nul.
g f
ä : est le degré relatif de h(x).On montre que pour y
L h(x) L L 1 h(x) .u
ä = ä + ä - (III-10)
f g f
La commande
|
1
u 1
=
L L h(
ä?
g f
|
x)
|
( L h(x) v)
- ä +
f
|
(III-11)
|
Conduit au système linéaire équivalent
à une chaîne de ä intégrateurs :
y = v
ä (III-12)
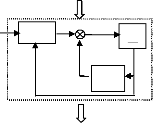
Le schéma synoptique pour les différentes
étapes de calcul est le suivant :
?.... ?
v
y

x)
u
â(
?
+
á(x)
v
y
Fig III-1. Linéarisation
entrée-sortie
| 

