III-3. Système multi-entrées multi-sorties
(MIMO)
On considère maintenant un système avec p
entrées et p sorties (Fig III-2) :
p
|
x f(x) g
& = + ? i
i 1
=
|
(x
|
)u
|
i
|
(III-13)
|
|
y h (
1 1
=
|
x), ,y p
|
h (
p
|
x)
|
? R
x R ; u i , y i
? n
En appliquant la même démarche que pour les
systèmes mono-entrée mono-sortie, chaque sortie yj est
dérivée äj fois jusqu'à ce qu'au moins une
dérivée j
L gi L ä f - h soit différente de
zéro
j 1
pour tout n
x? R
ChapitreIII Commande non linéaire de la
machine Asynchrone
Y1
?P
Up
Yp
v1
Y1
â p (
x )
?P
vp
Yp
á p (
x)
x
? ?
Y1
v1
? ?
vp
Yp
U1
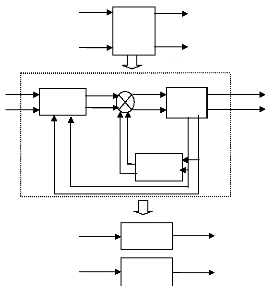
Fig III-2. Linéarisation pour des
systèmes MIMO
|
p
y ä = ä +
j L h ?
j
j f j
i 1
=
|
( ) i
L L h .u
ä -
j 1
gi f j
|
(III-14)
|
On obtient une (pxp) matrice D(x) dite de découplage [23,
24,25]
- 1
1
L L h
g1 f 1
ä
h p
...
- ä -
1 1
L L p
gp F
?
?
D(x) = ? M
? ä
?
?
?
?
?
? ?
? L L
p g1 f
h p
1
- 1
...
ä
L L
gp f
(III-15)
Le système devient ensuite :
ä ä
1 ? ?
y L h
1 ? ? u ?
1 f 1 1
? ? ? ? ?
M M M
? = ? ? + D(x) (III-16)
? ?
ä ä
p ? ? ?
L h
y
p ? ?
p ? ? ? ? f p ? ? ? u p ?
Si D(x) est non singulière, le retour d'état
statique qui linéarise le système est donné par :

? ? ? ? ? ?
(III-17)
? ? ?
? ?
1
?ä
?L h ? u
f 1 ? ? ?
) ? ? M M
? + ?
?ä ? p ?
?
? 1 ?
L h ?
? ? ? f p ? ? ? u
p
u ?
1 ?
M =D(x
- 1
?
u ?
p ?
? ? ?
?
?
Le système en boucle fermée est équivalent
à p chaîne de äj intégrateurs en parallèles
:
ä
y 1 ? ? v ?
1 1
? ? ?
M M (III-18)
? = ? ?
ä p ?
y ? ?
p ? ? ? v p ?
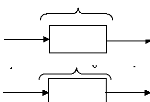
Nous obtenons donc un système découplé et
linéaire :
V1
Y1
?... ?
äj
M M
ä
p
Yp
V2
?... ?
Fig III-3. Système découplé et
linéarisé
Ces différentes étapes de calcul sont
représentées par la figure III-2
III-4. Commande non linéaire de la machine
asynchrone alimentée en tension III-4-1. Représentation
d'état non linéaire
Le modèle de la machine asynchrone exprimé dans le
référentiel lié au stator sous la forme d'état
s'écrit :
& X = F(X) + G.U (III-19)
Avec
|
X (x
=
|
T
s s r r
á â á â
1 2 3 4 5
, x , x , x , x ) (i , i , , , )
= Ö Ö Ù
|
T
|
|
F(x) =
|
(f (x), f (x) , f (x), f (x) , f (x))
1 2 3 4 5
|
T
|
T
? g 0 0 0 0 ?
1
G ??
=
? ? 0 g 0 0 0
2

U = (U s á U s â ) ; g 1 = g 2 = 1 ó .L S
k
f (x) = -ë .x + +
.x p.k.x .x
1 1 3 4 5
T r
k
f (x) = -ë .x + +
.x p.k.x .x
2 2 4 3 5
T r
M 1
f (x) = - +
.x .x p.x .x
3 1 3 4 3
T T
r r
M 1
f (x) = + -
.x p.x .x .x
4 2 3 5 4
T T
rr
r
M f 1
= - - -
r
f (x) p. (x .x x .x ) .x .C
5 2 3 1 4 5
J J
JL .
r
| 

