VI-6. Conception du régulateur flou
L'illustration du contrôleur flou se fait sur l'exemple de
la régulation de vitesse de la machine asynchrone.
VI-6-1 Choix des entrées et sorties
Dans le cas de la régulation de vitesse, on utilise
habituellement l'erreur = ù ref - ù
e et
la dérivée de l'erreur de :
|
e(k)
|
=
|
ù - ù
ref (k) (k)
|
(VI-12)
|
de(k) e(k) e(k 1)
= - -
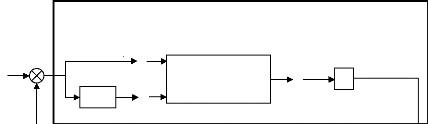
La structure du régulateur de vitesse à logique
floue est représentée par la figure VI-3. Le système est
constitué:
i Du contrôleur flou composé:
· d'un block de fuzzification de l'erreur et de sa
variation ;
· des règles de contrôle flou et d'un moteur
d'inférence ;
· d'un block de défuzzification utilisé pour
la variation de la commande floue en valeur numérique.
i D'un block intégrateur.
i Du processus à contrôler.
ùref
+
-
ù
Contrôleur flou
d/dt
de
e
Ø
Ø
Kde
Ke
Fuzzification Règles de contrôle
Défuzzification
diq Kdiq
Ø
?

Limitation du couple

Processus
Fig VI-3 Structure d'une commande à logique
floue
VI-7. Type de régulateurs flous
Il existe plusieurs types de régulateurs flous qui
diffèrent de mécanisme d'inférence utilisé, dont on
cite: régulateur de Mamdani, et de Sugeno.
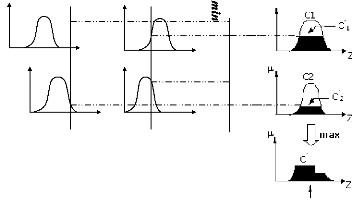
a) Régulateur Mamdani:
On donne l'expression générale d'un
contrôleur de Mamdani, en exprimant le graphe flou en fonction des
opérateurs choisis, c'est à dire l'opérateur
min. pour représenter le graphe flou associe
à chaque règle et l'opérateur
max. pour l'agrégation [35,36].
Exemple :
Considérons un ensemble de deux règles
définies par: R1 : Si x est A1 et y est B1 alors z est C1
R2:Si x est A2 et y est B2 alors zest
Pour x0 et y0 on aura á 1
et á2 caractérisant les degrés de confiance de
R1et R2 avec :
á1 = min( ì A1 (x
0 ), ì B1 (y 0 ))
á
=min(ì A 2 (x 0 ), ì B 2 (y 0 ))
2
La première règle donne :
ì? C1 (z) = min(á1,ì C 1( z))
La deuxième règle donne :
ì? C 2 (z) = min(á2,ì C 2( z))
Le résultat des deux règles est :
ì? C (z) = max(ìC1(z),ì( z))
Le raisonnement flou de Mamdani est donné
à la fig.VI-4:
z
Fig VI-4. Système d'inférence floue de
Mamdani
ì A1 ì ì
B1
X Y
A2
ì
B2
X Y
y
x
ì
b) Régulateur de Sugeno:
Le modèle de Sugeno (aussi connu sous le nom
du modèle de TSK) était proposé par Takagi, Sugeno et
Kang dans le but de développé une approche
systématique pour la génération des règles floues
à partir d'un ensemble de donnée entrée-sortie [35].
La règle floue typique dans le modèle de
Sugeno est sous la forme :
|
Si x est A et y est B alors z f
=
|
(x,y).
|
Oùf(x, y), généralement un polynôme,
est en fonction des entrées x et y. Exemple : Considérons un
ensemble à deux règles (fig.VI-5):
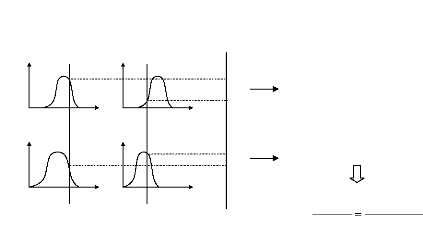
ì
1 p 1 x q 1 y r 1
= + +
R1 : Si x est A1 et y est B1 alors z
2 p 2 x q 2 y r 2
= + +
R2 : Si x est A2 et y est B2 alors z
ù1
ù
i
ù
1
+ù
2
z1 =p1x+q1y+r1
X
Y
ì
B2
A
z2 =p2x+q2y+r2
ù2
2
ù i i z z
z ù + ù
1 1 22
=
x
X
y
Y
z
?
i
ì ì
A
1
B1
Fig VI-5. Système d'inférence floue de
Sugeno VI-8. Application du contrôleur flou au réglage de la
vitesse
En utilisant la même structure de la commande que celle
présentée dans le chapitre précédent on remplace
seulement le régulateur classique (PI) par un régulateur flou du
type Sugeno dont les variables linguistiques sont:
> En entée l'erreur et la variation de l'erreur
notée respectivement `e ' et `de ' > En sortie Äu.
L'intervalle de chaque variable linguistique est subdivisé
en trois classes. A chacune des classes on associe une fonction
d'appartenance.
Ces classes sont comme suit :
ng : négative grand ez :
égal zéro pg : positive grand
En se basant sur le fonctionnement du régulateur et le
comportement de la machine, on déduit les règles
d'inférences floues suivantes:
|
Äu
|
|
e
|
|
|
ng
|
ez
|
pg
|
|
de
|
ng
ez
pg
|
ng
ng
ez
|
pg pg ng
|
ez pg pg
|
Tableau VI-1. Règles d'inférences
floues
Les paramètres Ke, Kde, et KÄu
représentent les gains d'adaptation du contrôleur flou ; ils
jouent un rôle extrêmement important dans les performances de la
commande.
VI-9. Avantages et inconvénients de la logique
floue
La logique floue n'est pas une solution à tous les
problèmes que l'on peut rencontrer lors de la conception d'une
régulation. Elle présente des avantages mais aussi certains
inconvénients.
| 

