VI-9-1. Les avantages essentiels
- La modélisation facultative du
procédé.
- La possibilité en cours de conception d'enrichir le
système flou par des connaissances. de l'opérateur sur le
fonctionnement du procédé.
- La maîtrise et l'appréhension du système
à régler lorsque celui-ci a un comportement complexe.
- L'utilisation de la conception.
VI-9-2. Les inconvénients essentiels
- Le manque de directives précises pour la conception, il
faut établir une stratégie de mesure de façon à
réaliser la meilleure étude heuristique.
- L'approche de la conception est donc artisanale est sa
systématique pour le moment. - L'ignorance de la détermination la
plus efficace du processus flou.
- La cohérence des inférences non garantie
à priori, certaines règles peuvent être contradictoires
entre elles.
- L'impossibilité de démontrer la stabilité
du circuit de réglage en toute généralité. - La
difficulté d'obtenir un procédé précis.
VI-10. Simulation
Le schéma bloc de simulation par logique floue du
système de commande non linéaire de la machine asynchrone
alimentée en tension avec orientation du flux rotorique est donné
à la figure VI-6.
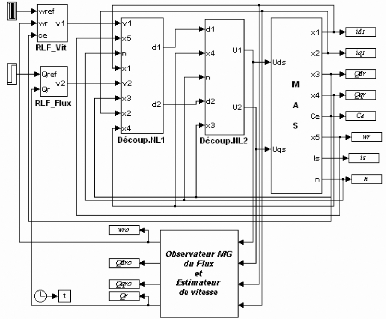
Fig VI-6. Schéma bloc de simulation Sous
Simulink du réglage flou de la commande non
linéaire de la MAS
en tension avec observateur MG.
VI-11. Résultats de simulation et
interprétation
Les graphes de la figure VI-7 représentent la vitesse
et son inversion, le couple électromagnétique, les courants
Ids et Iqs. Lors du réglage flou de la
machine asynchrone sans capteur mécanique et avec observateur du flux
par mode glissant, on remarque que le couple suit Iqs et
Ids contrôle le flux. Le découplage flux-couple est maintenu
en régime statique. Lors de l'inversion de la vitesse le courant
statorique présente un pique, qui reste dans les limites du
fonctionnement de la machine. De même, on remarque que le flux
observé suit le flux de la machine et la même remarque pour la
vitesse estimée par rapport à celle de la machine. On remarque
aussi que cette inversion est rapide par rapport au correcteur PI.
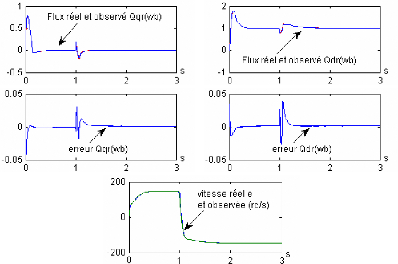
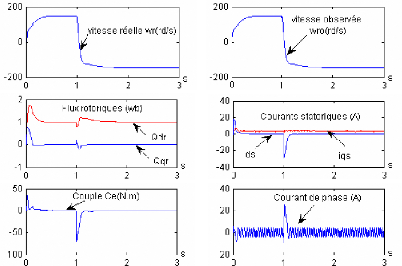
Fig VI-7. Réponses floues aux
échelons de vitesse plus ou moins 156rd/s de la commande
non
linéaire de la MAS alimentée en tension avec observateur
MG
VI-12. Test de robustesse
· Réglage PI
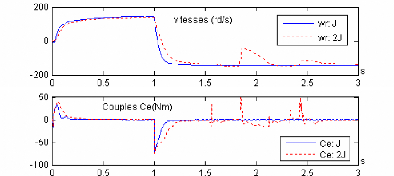
Fig VI-8. Test de robustesse de la commande non
linéaire de la MAS Alimentée en tension avec un régulateur
PI et avec observateur du flux par MG et sans capteur mécanique lors
d'une variation du moment d'inertie (J, 2*J)
· Réglage flou
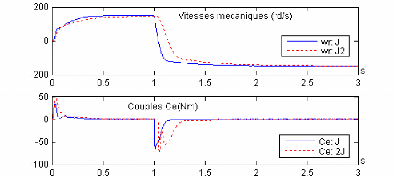
Fig VI-9. Test de robustesse du réglage flou
de la commande non linéaire de la MAS Alimentée en tension avec
observateur du flux par MG et sans capteur mécanique lors d'une
variation du moment d'inertie (J, 2*J)
Le système est sensible aux perturbations externes de
la charge dans le cas d'un régulateur PI. Tandis que, dans le
réglage flou, il est moins sensible. Donc, pour les deux techniques on
peut dire que le réglage par logique flou est plus performant et plus
robuste que le réglage par régulateur PI (figureV-8).
| 

