|
Evaluation des options à barrière dans le
modèle
GARCH
BEN KHELIL Mohamed Salah
à ma mère, mon père, ma soeur...
Remerciements
Ce travail est l'aboutissement d'un travail de quatre mois au
sein du Centre de Recherche en Economie Financière (CREF) et constitue
mon projet de fin d'études.
Toute ma gratitude et ma reconnaissance à tous ceux qui
m'ont aidé à accomplir ce travail.
Je tiens particulièrement à remercier mes
encadreurs Michèle BRETON et Hatem BEN AMEUR, chargés de
recherche au CREF et professeurs à HEC Montréal, pour leur
encadrement et leurs précieux conseils qui m'ont guidés tout au
long de ce stage.
Je tiens également à exprimer mes remerciements
aux étudiants Walid MNIF et Ali BOUDHINA, diplômés de
l'Ecole Polytechnique de Tunisie et actuellement étudiants en M.Sc.
ingénierie financière à HEC Montréal, pour leur
aide et leur soutien tout au long de ces quatre mois.
Résumé
Dans ce travail, nous proposons une méthode
numérique pour l'évaluation des options à barrière
européennes et américaines lorsque la dynamique du sous-jacent
est décrite par un processus GARCH avec inovations gaussiennes. Nous
utilisons la programmation dynamique comme méthode de tarification
couplée avec deux types d'approximations polynomiales de la valeur de
l'option. Le but de ce travail est d'évaluer l'efficacité de
cette méthode par rapport à d'autres procédures de
tarification proposées dans la littérature. Dans ce rapport,
plusieurs types d'options à barrières sont étudiés
à savoir les options à barrière activantes et
désactivantes, up et down.
Mots clés Pricing d'options, options à
barrière, Knock-out, Knock-in, programmation dynamique, approximation
quadratique-linéaire, approximation bilinéaire.
Abstract
In this paper, we propose a numerical method to value european
and american barrier options when the dynamics of the stock return is described
by a GARCH process based on Gaussian innovations. The procedure we use is
dynamic programming coupled with piecewise polynomial approximation. The aim of
this work is to evaluate the efficiency of this method with regard to other
pricing procedures proposed in the literature. In this report, various kinds of
barrier options are analyzed such as Knock-in and Knock-out options, up and
down.
Keywords Option pricing, barrier options, Knock-out, Knock-in,
dynamic programming, quadratic-linear approximation, bilinear approximation.
Table des matières
|
Introduction
1 Les options
|
9
12
|
|
1.1
|
Définition et caractéristiques des options
|
12
|
|
|
1.1.1
|
Définition
|
12
|
|
|
1.1.2
|
Fonction de gain (Payoff)
|
15
|
|
1.2
|
Hypothèses
|
16
|
|
|
1.2.1
|
Marché parfait
|
16
|
|
|
1.2.2
|
Martingale
|
17
|
|
|
1.2.3
|
GARCH volatilité
|
17
|
|
1.3
|
Modèles d'évaluation d'options
|
20
|
|
|
1.3.1
|
Modèle de Black & Scholes
|
20
|
|
|
1.3.2
|
Les arbres trinomiaux
|
21
|
|
|
1.3.3
|
Simulation Monte Carlo
|
23
|
|
|
1.3.4
|
Programmation dynamique
|
26
|
|
2
|
Programmation dynamique sous le modèle GARCH
|
27
|
|
2.1
|
Le modèle GARCH pour l'évaluation des options
|
27
|
|
|
2.1.1
|
Le modèle général
|
27
|
|
|
2.1.2
|
Le modèle de Duan (1995)
|
29
|
|
2.2
|
Formulation de la programmation dynamique
|
29
|
|
|
2.2.1
|
Equations de récurrence
|
30
|
|
|
2.2.2
|
Une approche polynomiale
|
31
|
|
|
2.2.3
|
Application aux différents types d'options à
barrière
|
32
|
|
2.3
|
Les fonctions d'approximations
|
34
|
|
|
2.3.1
|
Approximation quadratique-linéaire
|
34
|
TABLE DES MATIÈRES
2.3.2 Approximation bilinéaire 36
2.4 Construction de la grille 40
3 Résultats numériques 43
3.1 Contexte informatique 43
3.2 Données et hypothèses 43
3.3 Résultats de l'approximation
quadratique-linéaire 44
3.4 Résultats de l'approximation bilinéaire 53
3.5 Conclusion 55
Conclusion et perspectives 57
Bibliographie 59
A Matrices de transition dans le modèle NGARCH 61
B Constantes de l'interpolation bilinéaire 65
Liste des tableaux
2.1 Exemples de modèles GARCH 28
3.1 Call Européen Down & Out 45
3.2 Call Européen Up & Out 46
3.3 Call Européen Double Knock Out 47
3.4 Put Européen Down & Out 48
3.5 Put Américain Down & Out 49
3.6 Put Européen Up & Out 50
3.7 Put Européen Down & In 51
3.8 Call Européen Up & In 52
3.9 Put Européen Down & Out 53
3.10 Call Européen Up & Out 54
Table des figures
|
1.1
|
Options à barrière Down & Out
|
14
|
|
1.2
|
Options à barrière Up & In
|
14
|
|
1.3
|
Modèle trinomial de Ritchken pour l'évaluation des
options à barrière . . . .
|
21
|
|
1.4
|
Modèle trinomial de Cheuk et Vorst pour
l'évaluation des options à barrière
|
23
|
|
2.1
|
Distribution des prix de l'actif sous-jacent S
|
41
|
|
2.2
|
Distribution des volatilités H +1
|
41
|
|
3.1
|
Convergence du prix d'un Put Down & Out à l'aide de la
programmation
|
|
|
dynamique
|
54
|
|
3.2
|
Convergence du prix d'un Call Up & Out à l'aide de la
programmation dyna-
|
|
|
mique
|
55
|
Introduction
Ce travail s'inscrit dans le cadre d'un stage effectué
au Centre de Recherche en E-Financie (CREF) et à HEC Montréal.
L'une des missions du CREF consiste à étudier et analyser les
effets économiques, technologiques et financiers de la nouvelle
économie financière. La modélisation des marchés
financiers et la tarification des produits dérivés forment un axe
de recherche privilégié au CREF. Ce travail constitue donc un
volet de cet axe de recherche et présente une méthode de
tarification des options à barrière européennes et
américaines en utilisant la programmation dynamique.
Les options jouent un rôle très important dans
les marchés financiers. En effet, elles sont extrêmement
utilisées pour la couverture des risques. Ces dernières
années, les options à barrière sont devenues presque aussi
populaires que les options vanilles ordinaires. En effet, l'existence d'une
barrière a le plus souvent pour conséquence de réduire le
risque du vendeur de l'option. Aussi la valeur d'une option à
barrière est--elle généralement inférieure à
celle d'une option classique équivalente. La première
méthode de tarification d'options standards a été
proposée par Black et Scholes (1973). Ils proposent une formule
fermée où la volatilité du sous- jacent est
considérée comme étant constante. Dans ce même
contexte, Merton (1973) a établi une formule fermée qui permet
l'évaluation d'un Call de type Down & Out. L'évaluation des
autres types d'options à barrière (activantes,
désactivantes, up et down) a été ensuite proposée
par Reiner et Rubinstein (1991).
La diversification des modèles de tarification des
options standards avait comme impact la multiplication des procédures de
pricing des options à barrière. En effet, A partir du
modèle de Cox, Ross et Rubinstein (1979), Boyle et Lau (1994) ont
montré que le recours aux arbres binomiaux ne donnait pas lieu à
une convergence rapide du prix de l'option à barrière. Ce qui a
poussé Ritchken (1995) à proposer un modèle d'arbre
trinomial en donnant un degré de liberté supplémentaire
utile pour la localisation de la barrière. Ce modèle a
montré ses limites lorsque le niveau de la barrière est proche ou
loin du prix initial de l'actif sous-jacent. Cette difficulté a
été relevée par Cheuk et Vorst (1996) en proposant un
ajustement du treillis à
l'aide d'un terme multiplicatif de telle sorte qu'à une
période donnée, la valeur de la barrière coïncide
avec un niveau de prix de l'arbre trinomial. Cependant, cette approche
rencontre des problèmes lorsque plus d'une barrière conditionne
le prix de l'option.
Les options à barrière ont été
aussi évaluées par la méthode de la simulation. En effet,
Boyle, Broadie et Glasserman (1997) proposent une approche par les
méthodes de Monte Carlo. Certes cette méthode est robuste mais
présente un coût assez élevé de point de vue temps
de calcul et rencontre quelques difficultés pour l'évaluation des
options à barrières de type américain.
Tous les modèles présentés jusqu'ici
constituent les modèles de la première génération
puisque ils ont été développés sous la contrainte
que la volatilité est constante dans le temps. Cependant, les
séries financières présentent plusieurs
propriétés qui ne peuvent pas être étudiées
sous une volatilité constante. Ceci a poussé les études de
plusieurs modèles de variation de la volatilité dans le temps.
Engle (1982) a proposé une famille de modèles appelée ARCH
qui décrivent cette variation. Ces modèles ont été
ultérieurement généralisés par Bollerslev (1986)
pour proposer un processus général appelé GARCH
(Generalized AutoRegressive Conditional Heteroskedasticity).
Harrison et Kreps (1979) ont démontré que pour
qu'un processus puisse modéliser un marché parfait, il faut que
ce modèle suive une martingale. Le premier modèle à
volatilité variable à avoir vérifié cette
hypothèse est le modèle GARCH. En effet, Duan (1995) a
établi un modèle basé sur le processus GARCH pour
évaluer les options. Depuis, plusieurs procédures de tarification
ont été avancées dans la littérature en tenant
compte de ce nouvel aspect de la variabilité de la volatilité.
Ces procédures constituent la deuxième génération
des modèles de tarification d'options.
Dans ce contexte, Duan et Simonato (2001) ont proposé
une approximation par chaîne de Markov pour évaluer les options
vanilles européennes et américaines pour le modèle NGARCH.
Duan, Dudley, Gauthier et Simonato (2003) ont utilisé cette même
approximation pour tarifier les options à barrière pour le
même processus NGARCH. Cette méthode a donné de bons
résultats mais converge pour une discrétisation assez grande. Ben
Ameur, Breton et Martinez (2008) ont proposé une procédure
basée sur la programmation dynamique couplée avec une
approximation polynomiale pour le pricing des options standards. Cette
méthode a montré une rapidité dans la convergence et une
précision dans les résultats.
Compte tenu de l'efficacité de la programmation
dynamique dans ses résultats, nous proposons une méthode pour le
pricing des options à barrière européennes et
américaines basée sur la programmation dynamique et
couplée avec deux types d'approximations polynomiales. La méthode
qu'on propose ici peut être adaptée à tous les
modèles MGARCH (multivariate GARCH).
La première partie du présent rapport est
consacrée aux notions élémentaires à la
compréhension du document. Dans la deuxième partie, nous
présentons la formulation de la programmation dynamique pour
l'évaluation des options à barrière ainsi que les
approximations polynomiales associées. Dans la dernière partie,
nous présentons les résultats obtenus par cette méthode et
nous les comparons avec les résultats d'autres procédures de
tarification proposées dans la littérature.
Chapitre 1
Les options
Ce chapitre regroupe les notions élémentaires en
mathémathiques et en finance qui aident à la compréhension
de ce rapport.
1.1 Définition et caractéristiques des
options
1.1.1 Définition
Options vanilles
Une option financière est un produit dérivé
qui donne le droit, et non l'obligation : * d'acheter (option d'achat,
appelée aussi call)
* ou de vendre (option de vente, appelée aussi put)
une quantité donnée d'un actif financier (action,
obligation, indice boursier, devise, matière première, autre
produit dérivé, etc.), appelé actif sous-jacent
* à un prix précisé à l'avance K
(prix d'exercice ou strike en anglais),
* à une date d'échéance donnée T
(option dite européenne)
* ou durant toute la période jusqu'à
échéance (option dite américaine).
Ce droit lui-même se négocie, sur un marché
d'options spécialisé (géré par une bourse, ou au
gré à gré), contre un certain prix, appelé
prime.
Une option est dite dans la monnaie (in the money) lorsque son
exercice procure un gain à son détenteur. Elle est dite hors de
la monnaie (out of the money) dans le cas contraire. Enfin, si l'acheteur est
indifférent, l'option est à la monnaie (at the money).
Options à barrière
Les options à barrière sont des options qui
peuvent être activées ou désactivées
(c'est-à-dire créées ou annulées) par le passage du
prix de l'actif sous-jacent au-dessus ou en-dessous d'une valeur limite (la
barrière). Ceci permet de réduire le risque du vendeur et donc le
prix pour l'acheteur puisqu'elle ne produit ses effets que dans un ensemble
plus limité de situations. Les options à barrière
diffèrent selon si elles sont avec activation ou désactivation,
par franchissement à la hausse ou à la baisse de la
barrière. Ainsi, on classifie les options à barrière comme
suit :
* l'option down : l'option est désactivée ou
activée lorsque le cours de l'actif sous-jacent franchit la
barrière à la baisse;
* l'option up : l'option est désactivée ou
activée lorsque le cours de l'actif sous-jacent franchit la
barrière à la hausse.
De même, pour distinguer entre les options à
barrière activantes et désactivantes, on définit les deux
types suivants :
* l'option à barrière activante (knock-in
option) : pendant la durée de vie de l'option, celle-ci n'est active que
si elle atteint la barrière, et, dans ce cas, à
l'échéance sa valeur est la même qu'une option standard. En
revanche elle coûte moins cher qu'une option vanille puisque la
probabilité de perte du vendeur est moindre que dans le cas d'une option
vanille;
* l'option à barrière désactivante
(knock-out option) : pendant la durée de vie de l'option, celle-ci reste
active si la barrière n'est pas atteinte. L'option à
barrière est désactivée lorsque l'actif sous-jacent
franchit la barrière.
Ainsi, on peut compter 8 types d'options à
barrière selon qu'elle soit d'achat ou de vente, avec activation ou
désactivation, par franchissement à la hausse ou à la
baisse de la barrière. Les deux figures qui suivent représentent
deux types de ces options.
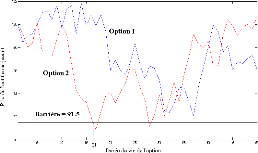
FIG. 1.1: Options à barrière Down & Out
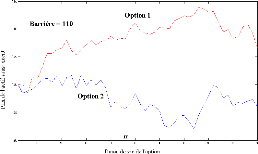
FIG. 1.2: Options à barrière Up & In
Ces deux figures représentent la variation du prix du
sous-jacent durant la durée de vie de l'option. La figure 1.1
représente deux options de type Down & Out. Pour la première
option, le prix du sous-jacent n'as jamais touché la barrière.
Ainsi, la valeur de l'option à barrière 1 est la même
qu'une option vanille. Pour la deuxième option, le prix du sous jacent a
touché la barrière à la date Tf. Ainsi, la valeur de cette
option est nulle.
La figure 1.2 représente deux options de type Up &
In. Le prix du sous-jacent pour l'option 1 a touché la barrière
à la hausse à la date Tf. Donc, la valeur de cette option devient
égale à une option vanille. Pour l'option 2, sa valeur reste
nulle puisque le prix de l'actif sous-jacent reste toujours inférieur
à la barrière tout au long de la durée de vie de
l'option.
1.1.2 Fonction de gain (Payoff)
On considère une option sur un seul type de sous-jacent
(actions, taux de change, taux d'intérêts) de maturité T
(en jours). On note son processus de gain {Xt, pour t E I} où I est
l'ensemble d'observations dans [0, T] quand l'exercice de l'option est
permis.
Option vanille
Le processus de gain d'une option vanille est
généralement caractérisé par une fonction de gain x
: I x [0, oo) --> IR, tel que Xt = x(t, s) pour t E I et s= St.
Ainsi, pour une option d'achat (Call) de type américain de
maturité T et de strike K, la fonction de gain s'écrit :
x(t, s) = max(s -- K, 0), Vt E [0, T]
De même, pour une option de vente (Put) de type
américain, la fonction de gain est définie par :
x(t, s) = max(K -- s, 0), Vt E [0, T]
Option à barrière
Pour évaluer les options à barrières sur
[0,t], il faut vérifier à chaque date t E [0, T] si le prix du
sous-jacent St a franchi la barrière ou non. Pour vérifier cette
condition, on définit une variable binaire Bt qui prend deux valeurs
possibles :
Bt = 1 si la barrière a été franchie sur
[0,t]
Bt = 0 sinon
On note le processus de gain d'une option à
barrière x* : I x [0, oo) x {0, 1} --> IR, tel que Xt =
x*(t, s, b) pour t E I, s = St et b = Bt. Ainsi, on a :
x*(t, s, b) =
{ x(t, s) si l'option est activée } 0 sinon
1.2 Hypothèses
1.2.1 Marché parfait
Les marchés financiers sont les marchés
où sont effectuées les transactions sur des actifs financiers et,
de plus en plus, leurs produits dérivés. Pour prédire le
fonctionnement de ces marchés, plusieurs modèles ont
été établis afin d'aider à leur
compréhension. Les modèles des marchés sont nombreux dans
la littérature et ils se basent généralement tous sur les
mêmes hypothèses.
Hypothèse de non arbitrage
L'arbitrage est une combinaison de plusieurs opérations
permettant de réaliser un bénéfice sans risque en tirant
parti de la différence entre le prix de marché et le prix
d'équilibre.
Définition 1 Un portefeuille autofinançant est
une stratégie d'achat ou de vente de titres, actions, prêts et
emprunts à la banque, et plus généralement de produits
dérivés, dont la valeur n'est pas modifiée par l'ajout ou
le retrait d'argent. On notera X la valeur en t du portefeuille X.
Définition 2 Un arbitrage sur la période [0, T]
est un portefeuille autofinançant X de valeur
nulle en t = 0 dont le
rendement XT en T est positif avec une probabilité strictement
positive.
X0=0, XT>0 et P(XT>0)>0
Pour les modèles des marchés financiers, on
suppose l'hypothèse d'absence d'opportunités d'arbitrage qui
signifie que "On ne peut gagner d'argent sans risque et sans capital initial".
Cette hypothèse est justifiée par l'existence d'arbitragistes,
acteurs sur les marchés dont le rôle est de détecter ce
type d'opportunités et d'en profiter. En effet, ceux-ci créent
une force qui tend à faire évoluer le prix de l'actif vers son
prix d'équilibre.
Hypothèse de complétude des marchés
Cette hypothèse stipule que tout flux à venir peut
être répliqué exactement, quel que soit l'état du
monde, par un portefeuille d'autres actifs bien choisis.
Probabilité martingale
Une des conséquences des hypothèses de non
arbitrage et de complétude des marchés est l'existence et
l'unicité à équivalence près d'une mesure de
probabilité dite probabilité martingale ou «
probabilité risque-neutre » telle que le processus de prix des
actifs ayant une source de risque commune est une martingale sous cette
probabilité. Cette probabilité peut s'interprêter comme
celle qui régirait le processus de prix des sous-jacents de ces actifs
si l'espérance du taux de rendement de ceux-ci était le taux
d'intérêt sans risque (d'où le terme risque-neutre : aucune
prime n'est attribuée à la prise de risque).
1.2.2 Martingale
Un processus stochastique (ou processus aléatoire)
représente une évolution, généralement dans le
temps, d'une variable aléatoire. En calcul stochastique, une martingale
désigne un type de processus stochastique. Ce type de processus X est
tel que sa valeur espérée connaissant l'information disponible
à une certaine date s, dénotée F5, est la
valeur à cette même date.
Définition 3 On se donne un espace de
probabilité (~, F, P) muni d'une filtration (Ft)t. Une famille de
variables aléatoires (Xt)t~0 est une martingale par rapport
à la filtration Ft si:
- Xt est Ft-mesurable et intégrable pour tout t. -E(Xt j
F5)=X5, Vs ~ t.
1.2.3 GARCH volatilité
Dans cette partie, on introduit les modèles GARCH
(Generalized AutoRegressive Conditional Heteroskedasticity) utilisés
dans la modélisation des séries financières. Les
modèles linéaires de séries temporelles se
révèlent incapables de représenter certaines
propriétés caractéristiques des séries
financières. Les modèles GARCH, introduits par Bollerslev en
1986, sont particulièrement adaptés à la prise en compte
de ces propriétés, ce qui explique leur fort impact dans les
littératures économique, financière et
économétrique. Ils reposent sur une spécification de la
variance conditionnelle du rendement.
Présentation du modèle
L'écriture du modèle GARCH porte sur la variance
conditionnelle du processus considéré. Soit
un processus yt,
d'espérance E(yt) = 0, satisfaisant une représentation de type
GARCH(p,q).
Ce processus s'écrit sous la forme suivante :
yt = c+ "t
/
"t = zt ht (1.1)
ht = ~0 + X q ai"2 t_i + X p
~iht_i
i=1 i=1
zt = iidN(0,1)
où zt désigne un bruit blanc faible
homoscédastique tel que E(zt) = 0 et Var(zt) = 1 et où les
paramètres, ai, [3i sont des réels. De façon usuelle, la
quantité ht désigne la variance conditionnelle du processus yt
telle que V(ytjyt_1) = V("tj€t_1) = ht où
yt_1 désigne l'ensemble des valeurs passées
{yt_1, . . . , y0 }. Afin de garantir la positivité de la
variance conditionnelle, on suppose que a0 >0 ,ai ~ 0, i = 1,..,q, i ~ 0, i
= 1,..,p.
Estimation des paramètres
Les paramètres du modèle GARCH peuvent être
estimés selon différentes méthodes : maximum de
vraisemblance, pseudo maximum de vraisemblance, méthode des moments,
etc. Les méthodes généralement retenues sont celles du
maximum de vraisemblance (MV) ou du pseudo maximum de vraisemblance (PMV).
L'avantage du PMV réside dans le fait que l'estimateur obtenu converge
malgré une mauvaise spécification (supposée normale) de la
distribution conditionnelle des résidus, à condition que la loi
spécifiée appartienne à la famille des lois
exponentielles. Ainsi, l'estimateur du MV obtenu sous l'hypothèse de
normalité des résidus et l'estimateur du PMV sont identiques,
seules leurs lois asymptotiques respectives diffèrent. Toutefois dans
les deux cas (MV ou PMV), sous les hypothèses standards, l'estimateur
est asymptotiquement convergent et asymptotiquement normal.
Dans notre travail, nous utilisons un modèle GARCH(1,1)
pour l'évaluation des options. En effet, ce modèle est le plus
utilisé en pratique et ses paramètres sont faciles à
estimer.
Considérons le cas du modèle GARCH(1,1)
donné par les équations suivantes :
yt = c+et
/
et = zt ht (1.2)
ht = ~0 + ~1e2 t1 + ~1ht~1
zt = iidN(0,1)
La fonction de log-vraisemblance associée à un
échantillon de T observations {y1, .., yT g obtenue sous
l'hypothèse de normalité de la loi conditionnelle de yt sachant
son propre passé s'écrit :
|
T
T 1 X
logL(0) = --2 log(2ir) -
2
t=1
|
XT
1
log(ht(0)) -
2
t=1
|
[yt - mt(0)]2 ht(0) ,
|
où 0 désigne l'ensemble des paramètres du
modèle, mt(0) désigne l'espérance conditionnelle et ht(0)
désigne la variance conditionnelle. Dans le cas du modèle GARCH(
1,1) présenté ci -dessus, ces variables sont :
mt(0) = c
ht(0) = ~0 + ~1e2 t1 + ~1ht~1:
Les estimateurs du maximum de vraisemblance sont alors obtenus
par résolution analytique d'un système de K = p + q + 2 (nombre
de paramètres à estimer) équations non linéaires
:
OlogL(0)
00 j~=b~ = 0
002 j~=b~ < 0
02 log L(0)
Dans le cas général du PMV, l'estimateur du PMV est
asymptotiquement convergent et normal.
|
pT (b0 --0) - d
T--oo
|
N(0, J1IJ),
|
avec
F ~
_ 82 log L(0)
J = E0 8080'
,
F8logL(0) ~
8logL(0)
I = E0 80 80'
Ooù E0 désigne l'espérance prise par rapport
à la vraie loi. Si la vraie distribution des erreurs est une loi normale
(cas du MV) alors I = J.
1.3 Modèles d'évaluation d'options
1.3.1 Modèle de Black & Scholes
La formule de Black & Scholes repose sur
l'hypothèse que les rendements de l'actif sous- jacent sont gaussiens,
ou de manière équivalente que la valeur de l'actif suit une
diffusion brownienne géométrique qui est solution de
l'équation différentielle stochastique suivante :
dSt = rStdt+o-StdWt
La formule proposée par Black et Scholes permet
d'évaluer le prix d'une option Call ou Put à partir des cinq
données suivantes:
- S0 la valeur actuelle de l'actif sous-jacent;
- T _ t le temps qui reste à l'option avant
échéance (en années);
- K le prix d'exercice fixé de l'option;
- r le taux d'intérêt sans risque;
- o- la volatilité du prix de l'action.
Ainsi, le prix théorique d'une option Call est
donné par:
C(S0, K, r, T, o-) = S0N(d1) _ Ke_r(T_t)N(d2).
De même, le prix théorique d'une option Put
s'écrit :
P(S0, K, r, T, o-) = _S0N(_d1) + Ke_r(T_t)N(_d2),
avec:
- N la fonction de répartition de la loi normale
centrée réduite N(0, 1);
[ln (S0 ) + (r + 1 2cr2) (T -
t)] ;
- d1 = 1
avT --t
- d2 = d1- a/T - t.
K
A partir de ce modèle, Merton (1973) propose une
généralisation de ces formules pour évaluer une option
à barrière Call de type Down & Out.
1.3.2 Les arbres trinomiaux
Le modèle trinomial de Ritchken
L'évaluation des options à barrière par
une méthode arborescente nécessite, pour des raisons de vitesse
de convergence, d'adapter la construction de l'arbre des prix de l'actif en
fonction du niveau de la barrière. En fait, il suffit de positionner un
niveau de prix de l'arbre exactement sur la valeur de la barrière pour
que la distribution mathématique du prix de l'option soit
respectée. En conséquence, l'emploi d'un arbre binomial est
inadapté au problème étudié. Le degré de
liberté supplémentaire dû à l'utilisation d'un arbre
trinomial permet d'ajuster très facilement l'arbre de sorte à
faire coïncider l'un des niveaux de prix du treillis avec la
barrière.
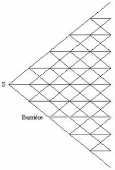
FIG. 1.3: Modèle trinomial de Ritchken pour
l'évaluation des options à barrière
Les niveaux du prix de l'actif au sein de l'arbre sont
donnés par:
S0ek~~(T_t),
avec:
- À une valeur adaptée de telle sorte que le
système de probabilités obtenu reste cohérent quelle que
soit la période considérée;
- o- la volatilité du prix de l'actif sous-jacent;
~~ et Ent
- k un entier relatif compris entre --Ent ~~N ~~N ~~ :
2 2
Afin que l'un des niveaux de prix correspondent au niveau B de
la barrière, il faut et il suffit
~~N ~~ et Ent ~~N ~~ tel que :
qu'il existe un entier relatif k, non nul et compris entre --Ent
2 2
~ B )
B = S0ek~~(T _t) ou encore k = 1
Àa(T -- t) ln S0
Selon Ritchken, il n'existe qu'une seule et unique valeur
À qui vérifie les équations précédentes. La
limite du modèle de Ritchken apparaît lorsque le niveau de la
barrière est proche du prix initial de l'actif. Dans ce cas, en dessous
d'un certain nombre de pas, il n'existe pas forcément d'entier k
strictement positif en valeur absolue permettant d'ajuster le paramètre
À.
Le modèle de Cheuk et Vorst
Pour une période donnée, plutôt que de
modifier les points les plus proches de la barrière, Cheuk et Vorst
(1996) multiplient toutes les valeurs possibles du prix de l'action par un
terme multiplicatif de telle sorte que l'un des niveaux du treillis des prix de
l'action coïncide avec la valeur de la barrière en cette date. La
figure ci-dessous illustre le type d'arbre trinomial qu'ils obtiennent :
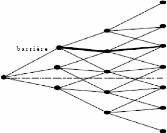
FIG. 1.4: Modèle trinomial de Cheuk et Vorst pour
l'évaluation des options à barrière
Cette méthode s'avère plus robuste que celle de
Ritchken de point de vue vitesse de convergence mais n'a pas pu relever les
limites qu'il a présentées (niveau de barrière très
proche du prix initial de l'actif).
1.3.3 Simulation Monte Carlo
Les méthodes Monte-Carlo
Les méthodes Monte Carlo visent à calculer une
valeur numérique en utilisant des techniques probabilistes.
Généralement ces méthodes sont utilisées pour
calculer des intégrales en dimensions plus grandes que 1. En finance, le
recours à ces méthodes permettent de calculer les prix des
options sur le marché.
Plus précisément, la simulation Monte-Carlo a pour
objet l'estimation de valeurs espérées (moyennes) de la forme:
Y = E[Y]
= E[P(X1,...,Xd)]
= XN1 ::: XNd P(xn1; :::; xnd)
f(xn1, ::., xnd) ou
n1 =1 nd=1
Z Z
::: P(x1; :::; xd) f(x1; :::;
xd)dx1:::dxd;
R R
selon la nature discrète ou continue de
l'expérience.
Dans le système précédent, on définit
Y comme un paramètre de performance d'un système stochastique de
dimension d caractérisé par:
* un output aléatoire Y;
* des inputs aléatoires X1, ..., Xd avec une
densité jointe f : Wd --p W+;
* une fonction de production P : Wd . W.
Ainsi, la simulation Monte-Carlo consiste à simuler de
manière indépendante N fois les inputs (X1N, ..., XdN)
et à calculer à chaque fois l'output correspondant YN = P(X1N,
..., XdN). N est appelé le nombre de trajectoires de la
simulation. Enfin, on obtient un échantillon d'outputs Y1, ..., YN iid
de taille N.
L'estimation de Y par l'estimateur de Monte-Carlo de taille N
s'écrit :
XN Yn
n=1
1
YN= N
=
1
N
XN
n=1
P(X1n,...,Xdn)
L'estimateur Monte-Carlo est convergent vers sa cible en
probabilité presque sûrement et en distribution du moment qu'on
est capable de produire des échantillons Y1, ..., YN i.i.d.
Cette convergence est assurée par les deux
théorèmes suivants :
Théorème 1 (Loi des grands nombres)
Soit (Yn)n>1 une suite de variables
aléatoires réelles intégrables i.i.d de même loi que
Y,
|
alors : 1 N
|
PN
n=1
|
Yn -!
N--*oo
|
E[Y] p.s dans L1. Si de plus, les (Yn)
sont de carré intégrable, on peut
|
|
1
YN=N
|
XN
n=1
|
Y n et N =
|
tu u v
|
1
N-1
|
XN
n=1
|
(YN - YN)2
|
montrer que la convergence se fait dans L2.
Théorème 2 (Théorème de la limite
centrale)
Soit (Yn)n>1 une suite de variables
aléatoires réelles i.i.d de carré intégrable de
même loi que Y. On suppose que Var(Y) > 0 et on pose
Alors
p \ YN -- E[Y ] J
N N!oo N (0, 1) en loi.
!
0N
Bien que la méthode de simulation de Monte Carlo est une
technique très utilisée dans l'évaluation des options,
elle présente quelques inconvénients qui sont principalement :
- une erreur de discrétisation donnée par
E[P(X1n, ..., Xdn)] -- E[P(X1, ..., Xd)];
- une erreur statistique dite erreur de Monte-Carlo donnée
par 1 N PN Yn -- E[Y ];
n=1
- une vitesse de convergence assez faible (de l'ordre de p~N
N , N > 0).
Compte tenu de ces erreurs, on propose pour la méthode de
simulation un intervalle de confiance à 95% autour de la valeur moyenne
YN. Cet intervalle s'écrit sous la forme suivante:
[ ]
YN -- 1:96 N
I95% = p N , YN + 1:96 N
p
N
Transformation inverse
On prend l'exemple du modèle NGARCH(1,1) qui
s'écrit comme suit:
|
St+1 lnSt
|
= r--
|
1
2
|
\/Ht+1 + Ht+1Et+1
|
Ht+1 =
/30+/1Ht+/2Ht(Et--À--O)2,
(1.3)
Q
Et+1 j Ft ~ N (0, 1),
Pour évaluer l'option à la date t 2 [0, T], il
faut connaître les variables St et Ht+1. Comme le montre
l'équation (1.3), ces deux variables dépendent de Et qui est une
variable aléatoire gaussienne sous la loi de probabilité risque
neutre Q.
Le principe de la simulation Monte Carlo consiste à
simuler plusieurs valeurs Et et Et+1 et par suite calculer St et
Ht+1. Ceci est possible puisque on connait la fonction inverse de la
fonction de distribution de la loi normale. En effet, dire que Et suit la loi
normale F, revient à dire qu'il existe une uniforme U sur [0, 1) tel que
Et = F ~1(U).
Ceci est justifié par le théorème suivant
:
Théorème 3 Soient F la fonction cumulative d'une
distribution continue D, F ~1 son inverse et U une uniforme sur [0,
1). On a alors :
F1(U) r D.
Ainsi, pour simuler un échantillon de E1, ..., ET i.i.d
selon la loi normale, on doit générer un échantillon U1,
..., UT i.i.d uniforme sur [0, 1) et puis le transformer par F ~1.
Il faut souligner que l'échantillon F ~1(U1), ..., F
~1(UT) a la même structure de distribution que
l'échantillon E1,...,ET.
Cette méthode appellée transformation inverse
est bien appréciée comme méthode de simulation d'inputs
car elle relie un input à une uniforme --[0, 1) par une relation
monotone.
1.3.4 Programmation dynamique
Définition 4 La programmation dynamique est une
méthode de résolution qui détermine la valeur optimale
d'un problème de décision selon le principe d'optimalité
de Bellman: «toute politique optimale est décomposée en
sous-politiques optimales».
Le programme dynamique utilisé dans notre travail
comporte deux caractéristiques spécifiques :
1. Le modèle GARCH. En effet, contrairement aux autres
méthodes de tarification proposées, la volatilité du prix
de l'actif sous-jacent n'est pas considérée constante et suit le
processus GARCH.
2. Des approximations polynomiales. En effet, il n'est pas
possible d'exprimer la valeur de l'option sous forme fermée. Donc on a
eu recours à des approximations polynomiales d'ordre 1 et 2.
Chapitre 2
Programmation dynamique sous le
modèle GARCH
Les modèles de la famille GARCH ont été
présentés, en premier lieu, par Bollerslev en 1986 et depuis ont
eu un énorme succès dans la description de la variation de la
volatilité dans le temps. En 1995, Duan a proposé un
modèle d'évaluation d'options dans lequel la dynamique du
sous-jacent est décrite par un processus GARCH à temps discret et
avec innovations gaussiennes. Nous présentons dans cette section le
modèle développé par Duan, la formulation de la
programmation dynamique pour évaluer les options à
barrière ainsi que les approximations polynomiales associées.
2.1 Le modèle GARCH pour l'évaluation des
options
2.1.1 Le modèle général
On considère une économie à temps discret
où l'intervalle de temps [t, t + 1] constitue "un jour" sans perte de
généralités. La dynamique du sous-jacent et de sa
volatilité conditionnelle sous la loi de probabilité physique P
est donnée par :
|
St+1 lnSt
|
1 p = r + t+1 - 2Ht+1 +
Ht+1"t+1
|
Ht+1 = g(Ht,$t) (2.1)
"t+1 j Ft ~ N (0, 1),
P
2.1. LE MODÈLE GARCH POUR L'ÉVALUATION DES
OPTIONS
où St est le cours du sous-jacent à la date t, r
le taux d'intérêt sans risque pour une période, Ht+1 sa
variance conditionnelle et €t+1, conditionné aux
informations Ft à la date t, est une variable aléatoire qui suit
la loi normale d'espérance nulle et de variance égale à
l'unité. t+1 est une prime de risque.
La fonction g est une fonction spécifique à un
modèle GARCH bien déterminé. On rappelle ici qu'on utilise
des spécifications GARCH au premier ordre (seulement une période
de décalage). Dans nos résultats numériques, on va
présenter les deux types GARCH suivants:
Le NGARCH(1,1) (non-linear asymmetric GARCH):
p
t+1 = À Ht+1 (2.2)
Ht+1 = /0 + /1Ht + /2Ht("t -- 0)2,
le HNGARCH(1,1) (Heston & Nandi GARCH) proposé par
Heston et Nandi (2000) :
1
t+1 = (À+ 2)Ht+1 (2.3)
p
Ht+1 = /0 + /1Ht + /2("t -- 0 Ht)2,
où À est une prime de risque et /0 > 0, /1 ~ 0,
/2 ~ 0 et 0 sont des paramètres réels qui satisfont des
conditions de stationnarité du modèle.
A part ces deux modèles GARCH, une multitude d'autres
modèles GARCH(1,1) peuvent être utilisés. On
présente dans le tableau suivant la fonction g des différents
modèles les plus utilisés dans les marchés financiers.
TAB. 2.1: Exemples de modèles GARCH
|
AGARCH
|
Ht+1 = /0+ /1Ht + /2(Et + 0)2
|
|
VGARCH
|
|
|
Ht+1 = /+ /1Ht + /2( "t/ + 0)2
0
t
|
|
EGARCH
|
ln(Ht+1) = /0 + / 1 ln(Ht) + /2( "t -- 0"t)
|
|
GJR-GARCH
|
Ht+1 = /0+ /1H t +/2"2
t+ /3H t max(--"t, 0)
|
2.1.2 Le modèle de Duan (1995)
En 1995, Duan a montré qu'il pouvait écrire les
équations du système (2.1) avec une autre loi de
probabilité Q en effectuant le changement de variable Et = €t +
~tpHt :Ainsi, la dynamique du sous-jacent devient :
|
st+1 lnSt
|
= r-
|
1
2
|
\/Ht+1 + Ht+1Et+1
|
Ht+1 = g(Ht,Et) (2.4)
Q
Et+1 j Ft ~ N (0, 1),
La loi de probabilité Q est connue sous le nom de loi de
probabilité risque-neutre. le terme d'erreur Et constitue bien une
variable aléatoire gaussienne sous la loi Q.
Sous cette mesure de probabilité, il a
été prouvé que la dynamique des prix est localement une
Q-martingale. Ainsi, le modèle GARCH décrit par les
équations (2.4) est un modèle efficace pour décrire un
marché efficient et complet où la possibilité d'arbitrage
est impossible. En effet, dans une économie où tous les agents
sont neutres face au risque, les investisseurs n'exigent aucune compensation
pour le risque; la rentabilité attendue de tous les actifs est alors
égale au taux sans risque. Ainsi, en utilisant la probabilité Q,
nous nous plaçons dans une telle économie, appelée
"univers risque-neutre".
Ainsi, considèrons une option dont la valeur à
la date T est le gain XT. Il s'en suit que cette option peut être
évaluée à n'importe quelle date t comme l'espérance
mathémathique du gain qu'elle engendre à
l'échéance, actualisée au taux sans rique. La formule
s'écrit comme suit :
vt(s, h) = EQ[e_r(T_t)XtjSt = s et Ht+1 =
h] (2.5)
~ Etsh[e_r(T_t)Xt]
2.2 Formulation de la programmation dynamique
A l'aide de la programmation dynamique, les options sont
évaluées par induction arrière en partant de la date
d'échéance T. A cette date, la valeur de l'option est connue et
elle vaut x(T, ST). Comme l'univers dans lequel on se situe est supposé
risque-neutre, la valeur de l'option à la date T - 1 peut être
calculée comme la valeur espérée à la date T
actualisée au taux d'intérêt sans risque r. De même,
la valeur à la date T - 2 peut être calculée comme la
valeur espérée à la date T - 1
actualisée au taux r; et ainsi de suite jusqu'à la date initiale.
Pour les options américaines, il est nécessaire de
vérifier à chaque date t si l'exercie immédiat est
préférable à la détention de l'option pour un jour
supplémentaire. La valeur de l'option à la date 0 est ainsi
déterminée par induction arrière sur tout l'intervalle [0,
T].
2.2.1 Equations de récurrence
On note vt(s, h, b) la valeur de l'option à la date t
quand St = s, Ht+1 = h et Bt = b, selon le prix ait franchi la barrière
ou non.
La condition initiale du programme dynamique stipule qu'à
la maturité, la valeur de l'option s'écrit :
vT(s, h, b) = x*(T, s, b) (2.6)
La valeur d'exercice de l'option à la date t, pour t E [0,
T], est définie par :
ve t (s, h, b) = x*(t, s, b) (2.7)
La valeur de détention de l'option à la date t,
pour t E [0, T], est donnée par:
vh t (s, h, b) = e_r(E[vt+1(St+1, Ht+2, Bt+1 = 0) St
= s, Ht+1 = h, Bt = b]
+ E[vt+1(St+1, Ht+2, Bt+1 = 1) St = s, Ht+1 = h, Bt = b])
(2.8)
= e_r(Etshb[vt+1(St+1, Ht+2, 0)] + Etshb[vt+1(St+1,
Ht+2, 1)])
Ainsi, la valeur de l'option à la date t sera :
vt(s, h, b) = max{ve t (s, h, b), vh t (s, h, b)}
(2.9)
L'idée d'utiliser la variable binaire Bt vient du
principe suivant : Si à la date t, le prix du sous-jacent franchit la
barrière, alors Bt = 1 et la valeur de l'option sera égale
à vt(s, h, 1). Sinon, si le prix n'a pas franchi la barrière, il
y a deux possibilités. La première est que si les prix du sous
jacent à des dates antérieures à t ont déjà
franchi la barrière, alors la valeur de l'option sera toujours
égale à vt(s, h, 1). La seconde est que si les prix
antérieurs n'ont jamais dépassé la barrière, alors
Bt = 0 et la valeur de l'option sera égale à vt(s, h, 0).
Pour évaluer l'option à barrière, on
résout les équations (2.6)-(2.9) en reculant dans le temps de la
valeur connue de l'option vT jusqu'à v0, en identifiant la meilleure
stratégie à chaque date t. La solution de ces équations ne
peut pas être calculée sous une forme exacte. En effet, la
résolution de ce système consiste à calculer une
espérance conditionnelle qui n'est autre qu'une intégrale
multiple (T intégrales consécutives) sous l'espace du cours du
sous-jacent et de la volatilité. Pour cela, nous allons donner une
approximation de la fonction valeur pour faciliter le calcul de
l'espérance. Dans notre travail, on a choisi une approximation
polynomiale comme approximation de la fonction valeur vt.
2.2.2 Une approche polynomiale
L'approximation polynomiale consiste en un premier temps
à discrétiser l'espace du prix du sous-jacent et l'espace de la
volatilité en des points bien déterminés. La valeur de
l'option sera tout d'abord calculée en ces points. En deuxième
lieu, à l'aide de l'interpolation polynomiale, on peut retrouver la
valeur de l'option en tout point de l'espace (prix sous-jacent,
volatilité).
La fonction valeur vt(s, h, b) est une fonction de deux
variables d'états (s, h) et d'une variable binaire b. Ainsi, afin
d'approcher cette fonction, on devra faire une approximation polynomiale pour
chaque variable d'état s et h. Pour ce faire, on se donne deux entiers
non nuls M et N. On discrétise l'espace des prix du sous-jacent et de la
volatilité respectivement en M et N points distincts comme suit : 0 = a0
< a1 < ... < aM < aM+1 = oc pour le cours du sous-jacent et 0 <
d0 <d1 < ... <dN <dN+1 = oc pour la volatilité. On
définit alors la grille de points suivantes :
GMN = {(ai, dj) j i = 0, ...,M et j = 0, ..., N}
On suppose que la valeur evt(s, h, b) est connue aux points s
= ai pour i = 0, .., M, h = dj pour j = 0, .., N et b E {0, 1}. On
définit l'interpolation polynomiale sur la fonction evt comme suit :
bvt(s,h,b) = XM XN P d
ijtb(s,h)li((s,h) E [ai,ai+1) x [dj,dj+1))
(2.10)
i=0 j=0
où I est la fonction indicatrice et P d ijtb(s, h) est
l'interpolation polynomiale de degré d qui satisfait
P d ijtb(ai, dj) =evt(ai,dj,b), i = 0,...,M, j = 0,...,N, b E
{0,1}
et
P d ijtb(s,dj) = evt(aM, dj, b) pour s > aM, b E {0, 1}
P
d ijtb(ai, h) = evt(ai, dN, b) pour h > dN, b E {0, 1}
Sous cette approximation, les équations (2.6) - (2.9) de
la programmation dynamique deviennent :
evT(s,h,b) = x*(T,s,b)
eve t (s, h, b) = x*(t,s,b) (2.11)
evh t (s, h, b) =
e_r(Etshb[bvt+1(St+1, Ht+2, 0)] +
Etshb[bvt+1(St+1, Ht+2, 1)]) evt(s,h,b) = max{eve t
(s,h,b), evh t (s,h,b)}
2.2.3 Application aux différents types d'options
à barrière
Options Knock-out
Les options à barrière de type Knock-out sont
désactivées et perdent leurs valeurs si, au cours de la
durée de vie de l'option, le prix du l'actif sous-jacent franchit au
moins une fois la barrière. Ainsi, si Bt = 1, on est sûr que le
prix a franchi la barrière et donc la valeur de l'option est nulle.
='vt(s,h,1)=0 VtE[0,T], Vs, Vh,
x*(t,s,1)=0 VtE [0,T], Vs.
Le système de la programmation dynamique
présenté en (2.11) devient alors:
evT(ST,HT+1,0) = x(T,s)
eve t (s,h,0) = x(t,s)
evh t (s, h, 0) =
e_rEtsh,0[bvt+1(St+1, Ht+2, 0)] evt(s, h, 0) = max{eve
t (s, h, 0), evh t (s, h, 0)}
Options Knock-in
Contrairement aux options Knock-out, les options à
barrière de type Knock-in prennent une valeur si le cours du sous-jacent
franchit la barrière au moins une fois pendant la durée de vie de
l'option. Il est clair qu'à la maturité T, on a:
evT(s,h,0) = x*(T,s,0)=0
evT(s,h,1) = x*(T,s,1)=x(T,s)
la valeur d'exercice à la date t E [0, T] s'écrit
:
eve t (s,h,0) = 0
eve t (s, h, 1) = x(t, s)
La valeur de détention à la date t E [0, T]
devient:
evh t (s, h, 0) =
e_r(Etsh,0[bvt+1(St+1, Ht+2, 0)] +
Etsh,0[bvt+1(St+1, Ht+2, 1)])
evh t (s, h, 1) = e
_r(Etsh;1[bvt+1(St+1 , Ht+2,0)] + Etsh,1[bvt+1(St+1,
Ht+2, 1)])
La valeur de l'option est donc:
evt(s,h,0) = evh t (s,h,0)
evt(s, h, 1) = max{eve t (s, h, 1), ev' t
(s, h, 1)}
A la date t = 0, la valeur de l'option Knock-in dépend
de la position de S0 par rapport à la
barrière. Ainsi, si S0
touche la frontière, B0 = 1 et la valeur de l'option est ev0(S0, H1, 1).
Par
contre, si S0 ne dépasse pas la valeur limite, B0 = 0 et la
valeur de l'option est ev0(S0, H1, 0).
2.3 Les fonctions d'approximations
Duan, Dudley, Gauthier et Simonato (2003) proposent une
approximation par une chaine de Markov pour évaluer les options à
barrière. Cette approximation est équivalente à une
interpolation par une fonction constante par morceaux pour chaque variable
d'état s et h. Dans cette section, nous allons présenter deux
types d'approximations polynomiales qui approchent la fonction valeur mieux que
l'approximation par une fonction constante par morceaux. La première
approximation est faite par une fonction quadratique sur s et linéaire
sur h. Avec cette approche, nous allons présenter des résultats
du modèle NGARCH(1,1) présenté dans l'équation
(2.2). La deuxième approximation utilise une fonction linéaire
pour s et h. Certes, cette approximation est moins bonne que la première
mais plus générale car elle s'adapte à n'importe quel
modèle GARCH(1,1).
2.3.1 Approximation quadratique-linéaire
L'interpolation polynomiale qu'on présente ici est une
approximation quadratique sur s et linéaire sur h. Le recours à
une telle approximation vient du fait que la focntion valeur v de l'option
à barrière est convexe par rapport à la variable s. Donc,
une fonction quadratique approche nettement mieux la valeur de l'option qu'une
autre approximation.
On définit deux ensembles I et J tel que I = {1, 3, 5,
..., M - 2} avec M impair et J = {1,2,3,...,N-1}. OnposeI=IU{-1,M}et
J=JU{0,N}aveclaconventiona_1 =a0 et aM+2 = aM+1. Ainsi, les rectangles [ai,
ai+2] x [bi, bj+1], pour i 2 I et j 2 J , couvrent tous l'espace
prix-volatilité [0, oc) x [b0, oc).
On suppose que la valeur evt(s, h, b) est connue aux points s =
ai pour i = 0, .., M, h = d j pour
j = 0, .., N et b 2 {0, 1}.
Pour s 2 [ai, ai+2), i 2 I, On définit l'interpolation quadratique
sur
la fonction iit comme suit :
(
-- ai)(ai+2 -- ai)
nijtb(s) = "iit(s, d , b)=7iit(ai, dj,
b)(ai+1-- s)(ai+2 -- s) (ai+1
~
-- s)(ai+2 -- s
+ Ut(ai+1, ( (ai b)
-- ai+1)(ai+2 -- a)
+1) (2.12) ~
+ Ut(ai+2, d, b) (( (ai -- s)(ai+1 -- s)
-- ai+2)(ai+1 -- ai+2)
Par suite, on définit l'interpolation linéaire sur
la fonction iit pour h E [dj, dj+1), j E J comme suit :
d .+1 -- h h --djut(a.d.+1 b)
î)t(ai, h, b)=71 _7
îlt(ai, d , b) + , (2.13)
3 d
· -- d
· z
aj+1 -- aj 3+1 3
En regroupant les équations (2.12) et (2.13), on
définit l'approximation quadratique-linéaire pour (s, h) E [ai,
ai+2) x [dj, dj+1), i E I, j E J par :
'1-t(s, h, b) = dj+1 -- h
nijtb(s)+h -- dj n
b(s)
dj+1 -- dj dj+1 -- d
· "
3
On rappelle que l'équation de la valeur de
détention evht définie dans (2.11) est
i7th (s, h, b) = e--r (Etshb [-vt+1 (St+1
, Ht+2 , 0)] + EtshBt [-vt+1 (St+1 , Ht+2 ,
1)] ) (2.14)
1
=
E
x=0
e--r (Etshb[-vt+1 (St+1 , Ht+2, x)])
En appliquant la formule (2.10) sur -vt+1(St+1, Ht+2,
0) et -vt+1(St+1, Ht+2,1)], la fonction /7h t à la date t et
aux points (ak, dl) E gMN devient :
1
evht(ak, dl, b) =
e--rEEEtakdlb(dj+1-- Ht+2
x=0
iEI jEJ
dj+1 -- dj ni,M+1,x(St+1) (2.15)
L
Ht+2--dj
+ d ni, j+1,t+1,x(St+1) 1[(Rij)
avec
Rij = {St+1 2 [ai,ai+2) et Ht+2
2 [dj,dj+1)}
L'espérance conditionnelle Etakdlb dans
l'équation (2.15) est indépendante de t tant que la grille de
points MN est fixée dans le temps. En utilisant la formule de
Pi;j;t;x donnée dans l'équation (2.12) dans
l'équation précédente, le calcul de l'espérance
revient alors à calculer six paramètres qui sont des
éléments des matrices de transition. Ces matrices sont :
Akjij = Eakbl [T[(Rij)] ; Bkjij = Eakbl[St+1T[(Rij)],
Cklij = Eakbl [Ht+2T[(Rij)] ; Dkjij = Eakbl[St+1Ht+2T[(Rij)],
Ekjij = Eakbl[S2 t+1T[(Rij)] ; Fkjij =
Eakbl[S2 t+1Ht+2T[(Rij)].
Comme la fonction valeur vt+1 dépend de deux
variables d'états complétement aléatoires (St+1, Ht+2),
toutes ces matrices ont été calculée pour le modèle
NGARCH(1,1) qui est le plus utilisé dans la pratique. Le calcul de ces
matrices est détaillé dans l'annexe A.
2.3.2 Approximation bilinéaire
Changement d'espace d'états
Dans cette partie, nous allons définir une
approximation qui est plus générale que la
précédente. En effet, on présente une
implémentation qui utilise une approximation bilinéaire et qui
s'adapte facilement à tous les modèles GARCH existants.
On rappelle que le modèle GARCH pour la tarification des
options présenté dans le deuxième chapitre s'écrit
comme suit :
|
St+1 lnSt
|
= r-
|
1
2
|
\/Ht+1 + Ht+1Et+1
|
Ht+1 = g(Ht,Et)
Q
Et+1 j Ft ~ N (0; 1);
|
En écrivant Et =
|
ln( St
St1 )--r+ 2 1 Ht
pHt à partir de la première équation
et en le remplaçant dans la
|
|
deuxième, on trouve:
Ht+1 = g(Ht,
|
ln(St St1 ) - r + 1 2Ht pHt ) =
g'(St_1, St, Ht)
|
A l'aide de cette équation, on remarque que le calcul
Ht+1 à la date t nécessite la donnée des
variables St_1, St et Ht dans la fonction g!. Pour tenir compte de
cela, on élargit l'espace d'états de la fonction valeur vt pour
inclure l'observation du prix du sous-jacent St_1 à la date t
- 1. On note ainsi la nouvelle fonction valeur à trois variables
d'états 'Wt et on a l'égalité suivante :
wt(St_1, St, Ht, Bt) = vt(St, g'(St_1, St, Ht), Bt)
Présentation de l'approximation bilinéaire
L'interpolation bilinéaire est une méthode qui
se base sur des polynômes d'ordre 1. Elle consiste à attribuer
à chaque point cible une combinaison linéaire des quatre points
sources les plus proches de son antécédent par la transformation
inverse.
On suppose que la valeur e'uit+1 (o, s, h, b) est
connue aux points o = aj pour j = 0, ..., M, s = ak pour k = 0, .., M, h = dl
pour l = 0, .., N et b E {0, 1}. On définit l'interpolation
bilinéaire sur la fonction e'it+1 comme suit :
|
bwt+1(aj, ak, h, Bt+1) =
|
8
<>>
>>:
|
ewt+1(aj, ak, dl, b) dj+1_h
dj+1_dj +
e2t+1 (aj, ak, dl+1, b) h_dj
dj+1_dj si h E [dl, dl+1]
ewt+1(aj, ak, dN, b) si h ~ dN
|
9
>>=
;> >
|
(2.16)
|
L'interpolation sur l'axe des prix de l'actif sous-jacent donne
:

(2.17)
ewt+1(aj, ak, h, b) ak+1 - s ak+1 - ak
K _1
bwt+1(aj,s,h,b) =
~
+ - wt+1(aj, ak+1, h, b) s - ak I(s E [ak, ak+1))
ak+1 - ak
+ ewt+1(aj,aK,h,b) li(s ~ aK)
Suite à l'approximation présentée ci-dessus,
nous allons calculer la valeur de détention ewt dans tous les points de
la grille. D'après l'équation (2.14), la valeur de
détention s'écrit :
[ewh t (aj, ak, dl, b) = e_r Etjklb[ bwt+1(ak , St+1,
Ht+1, 0)] + Etjklb[ bwt+1(ak, St+1, Ht+1, 1)]
Afin de calculer la valeur de l'espérance de
bwt+1(ak, St+1, Ht+1, 0) et de bwt+1(ak, St+1, Ht+1, 1),
nous allons utiliser l'approximation bilinéaire sur deux parties. La
première réalise l'interpolation sur la variable de prix puis la
seconde sur la variable de volatilité. Dans ce qui suit, nous allons
présenter les détails du calcul de l'interpolation de la fonction
bwt+1(., 0). La même démarche est faite pour interpoler
bwt+1(., 1).
En utilisant la définition de l'approximation
bilinéaire présentée dans l'équation(2.17), on
a:
"M_1 ~ ewt+1(ak, ai, Ht+1,
0)ai+1 - St+1
Etjklb[ bwt+1(ak, St+1, Ht+1, 0)] = Etjklbai+1-ai
i=0
)
+ ewt+1(ak, ai+1, Ht+1, 0)St+1
- ai T[(S t+1 E [ai, ai+1))
ai+1 - ai
I
+ ewt+1(ak, aM, Ht+1, 0)
T[(St+1 ~ aM)(2.18) On introduit dans ce qui suit deux constantes
T1jk li et T2 jkli indispensables pour le calcul de
l'équation (2.18). Pour j, k = 1, ..., M, i = 0, ...M et l = 0, ...N,
ces paramètres sont :
T 1 jkli = Etjkl[T[(St+1 E [ai,ai+1))]
T 2 jkli = Etjkl[St+1T[(St+1 E [ai,ai+1))]
Le calcul des ces deux constantes est explicité dans
l'annexe B.
A l'aide de ces paramètres, l'équation (2.18)
devient alors :
M--1~
X
jkli
ewt+1(ak, ai, Ht+1, 0)ai+1T 1 jkli
- T 2
ai+1 - ai
Etjklb[ bwt+1(ak, St+1, Ht+1, 0)] =
i=n
|
+ ewt+1(ak, ai+1, Ht+1, 0)
|
T 2 jkli - aiT 1 jkli
|
)(2.19)
|
|
ai+1 - ai
|
+ ewt+1(ak, aM, Ht+1, 0)T 1 jklM
En faisant un changement de variable sur i et en regroupant tous
les termes sous la même somme, l'équation (2.19) devient :
Etjklb[ bwt+1(ak, St+1, Ht+1, 0)] = XM
ewt+1(ak, ai, Ht+1, 0)Djkli (2.20)
i=n
où Djkli est une combinaison linéaire de
T1jk li et T2 jk li qui s'écrit comme suit :
8
<>>>
>>>:
Djkli =
e --r (
9
>>>=
;>> >
pouri=1,...,M-1
~
ai+1T 1
ai+1--ai + T 2
jkli--T 2 kl,i~1--ai_1T 1
jkli jkl,i_1 ,
ai--ai~1
~
T 1 jklM + T 2 jkl,M~1 --aM~1T 1 jkl ,M1 , pour i =
M
aM --aM~1
e--r (a1T 1 ~
jkl0--T 2 jkl0 , pour i = 0
a1--a0
La deuxième partie de l'approximation consiste à
interpoler ewt+1(ak, ai, h, 0) sur la variable h. Comme la
volatilité de l'option suit le processus GARCH, alors on a Ht+1 =
g'(o, s, h). Cette variable est alors déterministe et
calculable. Ainsi, on définit l'indice Jjkl tel que Jjkl = n
si g'(o, s, h) E [du, du+1). Ainsi, suite à la
définition de l'interpolation bilinéaire présentée
dans l'équation (2.16), on a:
|
ewt+1(ak, ai, Ht+1, 0) =
|
8
<>> >
>>>:
|
ewt+1(ak, ai, dJjkl, 0)dJjkl+1--Ht+1
dJjkl+1--dJ jkl +
ewt+1(ak, ai, dJjkl+1, 0) Ht+1 --dJ.kl
dJjkl+1--dJjkl siJjkl = 0, ..., N - 1
ewt+1(ak,ai,dN,0) si Jjkl = N
|
9
>>>=
;>> >
|
L'équation (2.20) devient donc :
Etjklb[ bwt+1(ak, St+1, Ht+1, 0)] = XM
]Djkli [ e'i2t+1(ak, ai, dJjkl, 0)Ujkl + e'i2t+1(ak, ai,
dJjkl+1, 0)Wjkl
i=0
(2.21)
avec
{Ujkl =
dJjkl+1_Ht+1 si ïjkl = 0 , ..., N - 1
dJ
jkl+1_dJjkl
1 si ïjkl=N
|
{Wjkl =
|
Ht+1_dJjkl si ïjkl = 0, ..., N - 1
dJjkl+1_dJjkl
0 si ïjkl=N
|
Enfin, la valeur de détention de l'option à
barrière à la date t est :
[ XM (
i=0
ewh t (aj, ak, dl, b) = e_r Djkli ewt+1(ak,
ai, dJjkl, 0)Ujkl + e t+1(ak, ai, dJjkl+1, 0)Wjkl
|
XM
+
i=0
|
(Djkli ewt+1(ak, ai, dJjkl, 1)Ujkl + e
t+1(ak, ai, dJjkl+1, 1)Wjkl
|
2.4 Construction de la grille
Dans cette section, on présente un critère de
choix pour la construction de la grrille MN présentée
dans la section précédente. Ce critère consiste à
représenter les quantiles des variables prix sous-jacent et
volatilité à l'aide de la simulation de Monte Carlo.
On rappelle que le modèle GARCH pour l'évaluation
des options s'écrit comme suit :
|
St+1 lnSt
|
= r-
|
1
2
|
pHt+1 + Ht+1Et+1
|
Ht+1 =
/30+/31Ht+/32Ht(Et-À-O)2,
(2.22)
Q
Et+1 j 1t ~ A/(0,1).
On remarque que les variables St et Ht+1
dépendent respectivement des termes d'erreur Et
et Et+1. Donc pour une trajectoire donnée n 2
{1, ..., N}, si on génèrer un échantillon de T
valeurs
E1, ..., ET, On obtient un échantillon de valeurs de S1,
·
·
·ST et H2, ..., HT+1 Donc, pour
un
nombre de trajectoires assez grand, on peut représenter les quantiles
des variables St et
Ht+1.
En d'autres termes, nous allons représenter le nombre
de points St et Ht+1 générés par la simulation
pour chaque intervalle. Ainsi, nous pouvons distinguer les intervalles de prix
et de volatilités selon leur fréquence.
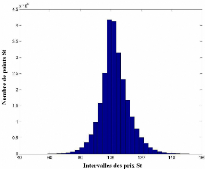
FIG. 2.1: Distribution des prix de l'actif sous-jacent St
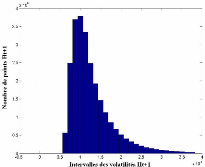
FIG. 2.2: Distribution des volatilités Ht+1
Dans les deux figures précédentes, on remarque
que la distribution de ln(St) est celle d'une distribution normale et que la
distribution de Ht+1 suit celle d'une Khi deux. Ce résultat
est prévisible puisque dans le modèle Garch, St dépend du
terme d'erreur Et et Ht+1 dépend du terme E 2 t avec Et suit
la loi normale centrée réduite.
Le but de cette représentation est d'identifier les
points {a0, a1, ..., aM} des prix et {d0, d1, ..., dN} des volatilités
de la grille MN présentée dans la section
précédente.
En analysant la figure 2.1, on constate qu'on a une
concentration de points au milieu plus qu'aux extrémités. De
même, pour la figure 2.2, on note une concentration de points dans des
parties plus que d'autres. Donc, choisir un pas constant pour les points de la
grille ne serait pas un choix judicieux. En effet, plusieurs points importants
seraient négligés et d'autres moins importants seraient
retenus.
Ainsi, pour tenir compte des ces constatations, nous avons
opté pour une grille logarithmique pour les deux distributions. En
effet, avec une telle grille, nous aurons un pas assez petit dans la partie
où il y a un maximum de points et un pas plus grand dans la partie
où il y a moins de points. Le choix de cette grille conduit à un
algorithme plus efficace et à une convergence plus rapide.
Chapitre 3
Résultats numériques
Dans cette partie, nous allons présenter les
résultats des prix des options à barrière obtenus pour les
deux approximations polynomiales présentées
précédemment. Afin de montrer la convergence et
l'efficacité de notre algorithme, on compare nos résultats avec
d'autres établis avec l'approximation constante par morceaux et des
intervalles de confiance construits à l'aide d'une simulation des
méthodes Monte-Carlo de 200 000 trajectoires. On présente ainsi
différents types de tableaux selon la nature de l'option à
barrière (Call - Put, Européenne - Américaine, Knock In -
Knock out, Down - Up)
3.1 Contexte informatique
Les résultats présentés dans les sections
suivantes ont été réalisés sur un ordinateur
cadencé à 3.8 GHz et dont la mémoire vive est de 1 Go de
RAM sous le système d'exploitation Windows. Les algorithmes ont
été écrits sous le langage C en utilisant la librairie
GSL. Les codes ont été compilés à l'aide du
logiciel GCC.
3.2 Données et hypothèses
Dans cette section, toutes les données et les
hypothèses pour aboutir aux résultats sont regroupées. Les
caractéristiques des options à barrière tarifiées
par la programmation dynamique et présentées dans les tableaux
suivants sont principalement :
- option d'achat (Call) et option de vente (Put);
- option européenne et américaine;
- sous-jacent : action;
- approximations:
- constante - constante avec volatilité de type
NGARCH(1,1); - quadratique - linéaire avec volatilité de type
NGARCH(1,1); - linéaire - linéaire avec volatilité de type
HNGARCH(1,1).
A côté de la programmation dynamique, nous avons
effectué une simulation Monte-Carlo pour la validation de nos
résultats. Les principales caractéristiques de cette simulation
sont principalement :
- nombre de trajectoires = 200 000;
- intervalles de confiance à 95% (I95%).
3.3 Résultats de l'approximation
quadratique-linéaire
Dans cette section, nous allons présenter les
résultats dans le modèle NGARCH, puisque le calcul de toutes les
matrices de transition pour cette approximation a été fait dans
ce modèle. Les paramètres du modèle NGARCH sont : 0 =
0.00001, /fJ 1 = 0.8, /2 = 0.1, O = 0.3, À = 0.2.
Les paramètres de l'option à barrière
sont : r = 0.1 (annuel), K = 100 dollars et H1 = 1.0989 x 104. On
assume le nombre de jours par année = 250.
Dans ces tableaux, on présente les résultats
obtenus par l'approximation quadratique-linéaire dans la colonne (Quad -
Lin). Nos résultats sont comparés dans la plupart des cas avec
les valeurs obtenues de l'approximation constante - constante (Cste - Cste) et
de la simulation des méthodes Monte Carlo.
Afin de justifier la rapidité et la précision de
la convergence de notre méthode, deux critères sont
présentés dans tous les tableaux :
- le CPU en secondes qui est le temps de calcul moyen de la
valeur de l'option pour toutes les barrières à une grille de
points bien déterminée;
- X2 MXN qui est le carré de la différence entre
deux valeurs d'options obtenues pour deux grilles M x N consécutives
pour l'approximation quadratique-linéaire. Les valeurs calculées
pour X2 MXN sont données dans les tableaux à l'ordre de
105.
Les valeurs soulignées dans ces tableaux montrent bien
la convergence des résultats. En effet, à chaque fois qu'on
augmente les points M x N de la grille MN, on remarque bien que les prix
donnés pas l'approximation quadratique-linéaire convergent plus
rapidement vers l'inervalle de la simulation que les prix donnés par
l'approximation constante-constante.
Les tableaux 3.1-3.6 regroupent les valeurs des options
à barrière de type Knock-out. Une propriété des
options désactivantes se retrouve dans ces tableaux. En effet, on
remarque bien que la valeur de l'option Knock-out diminue à chaque fois
que le prix de la barrière s'approche du prix de l'actif sous-jacent
initial 80. Ce résultat est prévisible puisque dans le cas
où le niveau de la barrière est loin du prix 80, la
probabilité pour que l'option s'annule est petite ainsi elle coûte
plus cher.
TAB. 3.1: Call Européen Down & Out
|
Barrière
|
85
|
93
|
|
M x N
|
Quad - Lin
|
Cste - Cste
|
X2 MXN
|
Quad - Lin
|
Cste - Cste
|
Xj.,IXN
|
CPU
|
|
25 * 25
|
4.2116
|
4.8610
|
****
|
4.0868
|
4.6439
|
****
|
1
|
|
31 * 31
|
4.2130
|
4.7395
|
0.196
|
4.0927
|
4.5399
|
3.481
|
2
|
|
35 * 35
|
4.2131
|
4.6409
|
0.001
|
4.0944
|
4.5058
|
0.289
|
3
|
|
41 * 41
|
4.2124
|
4.5267
|
0.049
|
4.0972
|
4.3811
|
0.784
|
5
|
|
45 * 45
|
4.2120
|
4.4866
|
0.016
|
4.0986
|
4.3936
|
0.196
|
7
|
|
51 * 51
|
4.2132
|
4.4272
|
0.144
|
4.1002
|
4.3082
|
0.256
|
9
|
|
75 * 25
|
4.2120
|
4.3252
|
0.144
|
4.1027
|
4.2142
|
0.625
|
8
|
|
93 * 31
|
4.2124
|
4.2910
|
0.016
|
4.1047
|
4.1846
|
0.4
|
15
|
|
105 * 35
|
4.2126
|
4.2618
|
0.004
|
4.1055
|
4.1539
|
0.064
|
21
|
|
123 * 41
|
4.2128
|
4.2539
|
0.004
|
4.1064
|
4.1470
|
0.081
|
32
|
|
135 * 45
|
4.2128
|
4.2501
|
0
|
4.1070
|
4.1466
|
0.036
|
40
|
|
153 * 51
|
4.2128
|
4.2343
|
0
|
4.1075
|
4.1296
|
0.025
|
46
|
|
|
Simulation
|
[4.1935 4.2389]
|
[4.0844 4.1300] 39
|
Dans le tableau 3.1 sont présentés les prix
obtenus pour un Call européen de type Down & Out. Le prix initial de
l'action est 80 = 100 et la maturité de l'option est T = 50 jours. On
évalue cette option pour deux valeurs de barrières 85 et 93: Les
douze premiers CPU sont calculés en secondes et sont ceux de
l'approximation quadratique-linéaire. Le dernier est celui de la
simulation.
Dans le tableau précédent, on remarque bien
comment les prix obtenus par l'approximation quadratique-liéaire
convergent rapidement. Cette conclusion est tirée à partir des
critères suivants:
- comparaison avec l'approximation constante-constante et la
simulation Monte-Carlo; - obtention d'un prix convergent à partir d'une
petite discrétisation de la grille M x N; - obtention d'un
résultat convergent en une seconde;
- convergence des prix vers une valeur exacte à chaque
fois qu'on augmente la grille (diminution du X2 MXN).
TAB. 3.2: Call Européen Up & Out
|
Barrière
|
135
|
155
|
|
|
M x N
|
Quad - Lin
|
Cste - Cste
|
X2 MXN
|
Quad - Lin
|
Cste - Cste
|
X2 I,JXN
|
CPU
|
|
25 * 25
|
12.1177
|
11.8833
|
****
|
12.3676
|
12.6777
|
****
|
1
|
|
31 * 31
|
12.0727
|
12.0393
|
202.5
|
12.3671
|
12.6191
|
0.025
|
1
|
|
35 * 35
|
12.0745
|
11.8839
|
0.324
|
12.3644
|
12.5695
|
0.729
|
2
|
|
41 * 41
|
12.1014
|
11.9697
|
72.361
|
12.3676
|
12.5076
|
1.024
|
3
|
|
45 * 45
|
12.1002
|
12.0576
|
0.144
|
12.3641
|
12.4851
|
1.225
|
4
|
|
51 * 51
|
12.0870
|
12.0024
|
17.424
|
12.3677
|
12.4563
|
1.296
|
6
|
|
75 * 25
|
12.0992
|
12.0289
|
14.884
|
12.3675
|
12.3986
|
0.004
|
5
|
|
93 * 31
|
12.1050
|
12.0639
|
3.364
|
12.3673
|
12.3875
|
0.004
|
9
|
|
105 * 35
|
12.1032
|
12.0751
|
0.324
|
12.3672
|
12.3740
|
0.001
|
13
|
|
123 * 41
|
12.1077
|
12.0772
|
2.025
|
12.3671
|
12.3709
|
0.001
|
20
|
|
135 * 45
|
12.1057
|
12.0776
|
0.4
|
12.3667
|
12.3684
|
0.016
|
21
|
|
153 * 51
|
12.1044
|
12.0806
|
0.169
|
12.3667
|
12.3617
|
0
|
29
|
|
|
Simulation
|
[12.0592 12.1269]
|
[12.3314 12.4009]
|
36
|
Dans le tableau 3.2 sont présentés les prix
obtenus pour un Call européen de type Up & Out. Le prix initial de
l'action est 80 = 110 et la maturité de l'option est T = 50 jours. On
évalue cette option pour deux valeurs de barrières 135 et 155:
Les douze premiers CPU sont calculés en secondes et sont ceux de
l'approximation quadratique-linéaire. Le dernier est celui de la
simulation.
TAB. 3.3: Call Européen Double Knock Out
|
Barrière Haute
|
110
|
125
|
|
|
Barrière Basse
|
95
|
95
|
|
|
M x N
|
Quad - Lin
|
Cste - Cste
|
X2 MXN
|
Quad - Lin
|
Cste - Cste
|
X2 IXN
|
CPU
|
|
25 * 25
|
0.2202
|
1.3868
|
****
|
3.5464
|
3.5555
|
****
|
2
|
|
31 * 31
|
0.2163
|
0.3072
|
1.521
|
3.5533
|
3.5733
|
4.761
|
3
|
|
35 * 35
|
0.2159
|
0.5160
|
0.016
|
3.5433
|
2.0538
|
10
|
4
|
|
41 * 41
|
0.2153
|
0.0708
|
0.036
|
3.5514
|
2.4147
|
6.561
|
7
|
|
45 * 45
|
0.2145
|
0.3743
|
0.064
|
3.5579
|
2.6560
|
4.225
|
9
|
|
51 * 51
|
0.2123
|
0.1883
|
0.484
|
3.5639
|
4.1806
|
3.6
|
13
|
|
75 * 25
|
0.2108
|
0.2071
|
0.225
|
3.5908
|
3.0914
|
72.361
|
10
|
|
93 * 31
|
0.2074
|
0.1600
|
1.156
|
3.5844
|
3.2927
|
4.096
|
18
|
|
105 * 35
|
0.2062
|
0.2077
|
0.144
|
3.5881
|
3.4217
|
1.369
|
27
|
|
123 * 41
|
0.2059
|
0.1852
|
0.009
|
3.5949
|
3.4909
|
4.624
|
42
|
|
135 * 45
|
0.2057
|
0.1928
|
0.004
|
3.5932
|
3.4437
|
0.289
|
54
|
|
153 * 51
|
0.2056
|
0.1835
|
0.001
|
3.5930
|
3.4887
|
0.004
|
60
|
|
|
Simulation
|
[0.1983 0.2175]
|
[3.5423 3.6055]
|
80
|
Dans le tableau 3.3 sont présentés les prix
obtenus pour un Call européen de type Double Knock out. En d'autres
termes, cette option est conditionnée par deux barrières limites.
Ainsi, si le prix du sous-jacent franchit l'une de ces barrières
à la hausse ou à la baisse, l'option s'annule. Le prix initial de
l'action est 80 = 100 et la maturité de l'option est T = 125 jours. On
prend pour cette évaluation le niveau bas de la barrière toujours
égal à 95 et pour le niveau supérieur, on prend deux
valeurs de barrières 110 et 125: Les douze premiers CPU sont
calculés en secondes et sont ceux de l'approximation
quadratique-linéaire. Le dernier est celui de la simulation.
TAB. 3.4: Put Européen Down & Out
|
Barrière
|
85
|
93
|
97
|
|
|
M x N
|
Quad - Lin
|
X2 MXN
|
Quad - Lin
|
X2 MXN
|
Quad - Lin
|
X2 MXN
|
CPU
|
|
25 * 25
|
1.5616
|
|
****
|
0.3631
|
|
****
|
0.0293
|
|
****
|
1
|
|
31 * 31
|
1.5780
|
|
26.896
|
0.3682
|
|
2.601
|
0.0303
|
|
0.1
|
2
|
|
35 * 35
|
1.5783
|
|
0.009
|
0.3677
|
|
0.025
|
0.0311
|
|
0.064
|
2
|
|
41 * 41
|
1.5802
|
|
0.361
|
0.3773
|
|
9.216
|
0.0318
|
|
0.049
|
3
|
|
45 * 45
|
1.5876
|
|
5.476
|
0.3805
|
|
1.024
|
0.0321
|
|
0.009
|
4
|
|
51 * 51
|
1.5978
|
|
10.404
|
0.3839
|
|
1.156
|
0.0334
|
|
0.169
|
7
|
|
75 * 25
|
1.6006
|
|
0.784
|
0.3917
|
|
6.084
|
0.0338
|
|
0.016
|
5
|
|
93 * 31
|
1.6093
|
|
7.569
|
0.3958
|
|
1.681
|
0.0340
|
|
0.004
|
10
|
|
105 * 35
|
1.6144
|
|
2.601
|
0.3962
|
|
0.016
|
0.0350
|
|
0.1
|
14
|
|
123 * 41
|
1.6163
|
|
0.361
|
0.3987
|
|
0.625
|
0.0355
|
|
0.025
|
21
|
|
135 * 45
|
1.6177
|
|
0.196
|
0.3985
|
|
0.004
|
0.0353
|
|
0.004
|
27
|
|
153 * 51
|
1.6187
|
|
0.1
|
0.3989
|
|
0.016
|
0.0359
|
|
0.036
|
27
|
|
|
|
|
|
Simulation
|
[1.5549
|
1.6213]
|
[0.3600
|
0.4102]
|
[0.0300
|
0.0378]
|
35
|
Dans le tableau 3.4 sont présentés les prix
obtenus pour un Put européen de type Down & Out. Le prix initial de
l'action est 80 = 100 et la maturité de l'option est T = 50 jours. On
évalue cette option pour trois valeurs de barrières
85; 93 et 97: Les douze premiers CPU sont calculés en
secondes et sont ceux de l'approximation quadratique-linéaire. Le
dernier est celui de la simulation.
TAB. 3.5: Put Américain Down & Out
|
Barrière
|
85
|
93
|
|
|
M x N
|
Quad - Lin
|
Cste - Cste
|
X2 MXN
|
Quad - Lin
|
Cste - Cste
|
X2 MXN
|
CPU
|
|
25 * 25
|
3.4328
|
4.1086
|
****
|
3.0089
|
3.4670
|
****
|
1
|
|
31 * 31
|
3.4328
|
4.6099
|
0
|
2.9952
|
3.4738
|
18.769
|
3
|
|
35 * 35
|
3.4327
|
4.5704
|
0.001
|
2.9850
|
3.2675
|
10.404
|
4
|
|
41 * 41
|
3.4326
|
4.3984
|
0.001
|
2.9705
|
3.4076
|
21.025
|
6
|
|
45 * 45
|
3.4323
|
4.3169
|
0.009
|
2.9617
|
3.3579
|
7.744
|
7
|
|
51 * 51
|
3.4325
|
4.1571
|
0.004
|
2.9484
|
3.2511
|
17.689
|
11
|
|
75 * 25
|
3.4310
|
3.7887
|
0.225
|
2.9288
|
3.0914
|
38.416
|
8
|
|
93 * 31
|
3.4310
|
3.7013
|
0
|
2.9223
|
3.0428
|
4.225
|
18
|
|
105 * 35
|
3.4309
|
3.6421
|
0.001
|
2.9165
|
3.0247
|
3.364
|
25
|
|
123 * 41
|
3.4307
|
3.5721
|
0.004
|
2.9149
|
2.9876
|
0.256
|
41
|
|
135 * 45
|
3.4305
|
3.5362
|
0.004
|
2.9139
|
2.9674
|
0.1
|
53
|
|
153 * 51
|
3.4304
|
3.5116
|
0.001
|
2.9136
|
2.9496
|
0.009
|
65
|
Dans le tableau 3.5 sont présentés les prix
obtenus pour un Put américain de type Down & Out. Le prix initial de
l'action est 80 = 100 et la maturité de l'option est T = 125 jours. On
évalue cette option pour deux valeurs de barrières 85 et 93: Les
CPU sont calculés en secondes et sont ceux de l'approximation
quadratique-linéaire. On ne présente pas de simuation dans ce
tableau. En effet, la simulation des options américaines avec les
méthodes Monte-Carlo présente quelques difficultés.
TAB. 3.6: Put Européen Up & Out
|
Barrière
|
115
|
135
|
|
|
M x N
|
Quad - Lin
|
X2 MXN
|
Quad - Lin
|
X2 MXN
|
CPU
|
|
25 * 25
|
0.3497
|
****
|
0.3885
|
****
|
1
|
|
31 * 31
|
0.3585
|
7.744
|
0.3887
|
0.004
|
2
|
|
35 * 35
|
0.3567
|
0.324
|
0.3881
|
0.036
|
3
|
|
41 * 41
|
0.3570
|
0.009
|
0.3875
|
0.036
|
5
|
|
45 * 45
|
0.3568
|
0.004
|
0.3879
|
0.016
|
6
|
|
51 * 51
|
0.3551
|
0.289
|
0.3880
|
0.001
|
9
|
|
75 * 25
|
0.3557
|
0.036
|
0.3881
|
0.001
|
7
|
|
93 * 31
|
0.3560
|
0.009
|
0.3873
|
0.064
|
14
|
|
105 * 35
|
0.3558
|
0.004
|
0.3877
|
0.016
|
20
|
|
123 * 41
|
0.3558
|
0
|
0.3876
|
0.001
|
33
|
|
135 * 45
|
0.3559
|
0.001
|
0.3876
|
0
|
38
|
|
153 * 51
|
0.3559
|
0
|
0.3874
|
0.004
|
41
|
|
|
Simulation
|
[0.3491 0.3643]
|
[0.3814 0.3973]
|
36
|
Dans le tableau 3.6 sont présentés les prix
obtenus pour un Put européen de type Up & Out. Le prix initial de
l'action est 80 = 110 et la maturité de l'option est T = 50 jours. On
évalue cette option pour deux valeurs de barrières 115 et 135:
Les CPU sont calculés en secondes et sont ceux de l'approximation
quadratique-linéaire. Le dernier représente le temps de calcul de
la simulation.
Dans les tableaux suivants, on reporte les prix
calculés des options à barrière de type Knockin.
Contrairement aux options de type Knock-out, on constate que le prix de
l'option activante est plus cher quand la barrière est proche de 80.
Ceci vient du fait que la probabilité pour que l'option à
barrière Down&In ou Up&In soit activée est plus
élevée quand le prix de la barrière est voisin de 80.
Un autre cas particulier qu'on doit remarquer est que si
à la date t = 0, le prix 80 franchit déjà la
barrière, l'option Knock-in est alors activée et sa valeur est la
plus élevée et est égale à la valeur d'une option
vanille.
TAB. 3.7: Put Européen Down & In
|
Barrière
|
90
|
95
|
110
|
|
|
M x N
|
Quad - Lin
|
X2 MXN
|
Quad - Lin
|
X2 MXN
|
Quad - Lin
|
X2 MXN
|
CPU
|
|
25 * 25
|
1.0802
|
****
|
1.9906
|
|
****
|
2.2342
|
|
****
|
1
|
|
31 * 31
|
1.0541
|
68.121
|
1.9697
|
|
43.681
|
2.2356
|
|
0.196
|
2
|
|
35 * 35
|
0.9940
|
361.201
|
1.9730
|
|
1.089
|
2.2356
|
|
0
|
4
|
|
41 * 41
|
0.9873
|
4.489
|
1.9526
|
|
41.616
|
2.2348
|
|
0.064
|
5
|
|
45 * 45
|
0.9838
|
1.225
|
1.9495
|
|
0.961
|
2.2344
|
|
0.016
|
7
|
|
51 * 51
|
0.9797
|
1.681
|
1.9464
|
|
0.961
|
2.2355
|
|
0.121
|
12
|
|
75 * 25
|
0.9690
|
11.449
|
1.9358
|
|
11.236
|
2.2342
|
|
0.169
|
10
|
|
93 * 31
|
0.9652
|
1.444
|
1.9299
|
|
3.481
|
2.2346
|
|
0.016
|
16
|
|
105 * 35
|
0.9648
|
0.016
|
1.9293
|
|
0.036
|
2.2347
|
|
0.001
|
24
|
|
123 * 41
|
0.9639
|
0.081
|
1.9285
|
|
0.064
|
2.2349
|
|
0.004
|
36
|
|
135 * 45
|
0.9635
|
0.016
|
1.9283
|
|
0.004
|
2.2349
|
|
0
|
50
|
|
153 * 51
|
0.9631
|
0.016
|
1.9277
|
|
0.036
|
2.2349
|
|
0
|
62
|
|
|
|
|
Simulation
|
[0.9448 1.0156]
|
[1.9113
|
1.9854]
|
[2.2214
|
2.2574]
|
32
|
Dans le tableau 3.7 sont présentés les prix
obtenus pour un Put européen de type Down & In. Le prix initial de
l'action est 80 = 100 et la maturité de l'option est T = 50 jours. On
évalue cette option pour trois valeurs de barrières. deux valeurs
90 et 95 en-dessous du prix initial de l'action et une valeur égale
à 110 au-dessus de 80. Les CPU sont calculés en secondes et sont
ceux de l'approximation quadratique-linéaire. Le dernier
représente le temps de calcul de la simulation.
TAB. 3.8: Call Européen Up & In
|
Barrière
|
95
|
105
|
110
|
|
|
M x N
|
Quad - Lin
|
X2 MXN
|
Quad - Lin
|
|
X2 MXN
|
Quad - Lin
|
X2 MXN
|
CPU
|
|
25 * 25
|
4.2144
|
|
****
|
3.5462
|
|
****
|
2.1706
|
|
****
|
1
|
|
31 * 31
|
4.2157
|
|
0.169
|
3.6135
|
|
452.929
|
2.1502
|
|
41.616
|
4
|
|
35 * 35
|
4.2158
|
|
0.001
|
3.6280
|
|
21.025
|
2.1022
|
|
230.4
|
5
|
|
41 * 41
|
4.2149
|
|
0.081
|
3.5824
|
|
207.936
|
2.1452
|
|
184.9
|
7
|
|
45 * 45
|
4.2145
|
|
0.016
|
3.6038
|
|
45.796
|
2.1437
|
|
0.225
|
9
|
|
51 * 51
|
4.2156
|
|
0.121
|
3.6230
|
|
36.864
|
2.1225
|
|
44.944
|
14
|
|
75 * 25
|
4.2143
|
|
0.169
|
3.5857
|
|
139.129
|
2.1167
|
|
3.364
|
12
|
|
93 * 31
|
4.2147
|
|
0.016
|
3.5788
|
|
4.761
|
2.1070
|
|
9.409
|
21
|
|
105 * 35
|
4.2148
|
|
0.001
|
3.5866
|
|
6.084
|
2.1308
|
|
56.644
|
30
|
|
123 * 41
|
4.2150
|
|
0.004
|
3.6066
|
|
40
|
2.1296
|
|
0.144
|
47
|
|
135 * 45
|
4.2150
|
|
0
|
3.6094
|
|
0.784
|
2.1239
|
|
3.249
|
63
|
|
153 * 51
|
4.2150
|
|
0
|
3.6030
|
|
4.096
|
2.1211
|
|
0.784
|
80
|
|
|
|
|
|
Simulation
|
[4.1923
|
4.2377]
|
[3.5748
|
3.6316]
|
[2.0934
|
2.1518]
|
34
|
Dans le tableau 3.8 sont présentés les prix
obtenus pour un Call européen de type Up & In. Le prix initial de
l'action est 80 = 100 et la maturité de l'option est T = 50 jours. On
évalue cette option pour trois valeurs de barrières. deux valeurs
105 et 110 au-dessus du prix initial de l'action et une valeur égale
à 95 en-dessous de 80. Les CPU sont calculés en secondes et sont
ceux de l'approximation quadratique-linéaire. Le dernier
représente le temps de calcul de la simulation.
3.4 Résultats de l'approximation
bilinéaire
A l'aide de l'approximation bilinéaire, nous pouvons
calculer la valeur d'une option à barrière dans tous les
modèles GARCH(1,1). Dans cette section, nous présentons les
résultats dans le modèle HNGARCH présenté par les
équations (2.3). Les paramètres du modèle HNGARCH sont : 0
= 0.000005, /31 = 0.6, /2 = 0.0000015, 0 = 400, À = 0.2.
Les paramètres de l'option à barrière sont :
r = 0.05 (annuel), T = 30 jours et H1 = 6.16 x 10-5. On assume le
nombre de jours par année = 365.
TAB. 3.9: Put Européen Down & Out
|
Barrière
|
40
|
45
|
|
|
M x N
|
Lin - Lin
|
X2 MXN
|
Lin - Lin
|
X2 MXN
|
CPU (sec)
|
|
25 * 25
|
1.1558
|
****
|
0.6242
|
****
|
5
|
|
51 * 51
|
0.8077
|
12117.361
|
0.5971
|
73.441
|
112
|
|
71 * 71
|
0.6731
|
1811.716
|
0.5823
|
21.904
|
582
|
|
101 * 101
|
0.5708
|
1046.529
|
0.5194
|
395.641
|
877
|
|
131 * 131
|
0.5117
|
349.281
|
0.4604
|
348.1
|
2415
|
|
141 * 141
|
0.4944
|
29.929
|
0.4522
|
6.724
|
3590
|
|
151 * 151
|
0.4823
|
14.641
|
0.4431
|
8.281
|
4249
|
|
171 * 171
|
0.4765
|
3.364
|
0.4401
|
0.9
|
7624
|
|
|
Prix moyen
|
0,4724
|
0,4302
|
|
|
Simulation
|
[0,4467 0,4981]
|
[0,4010 0,4595]
|
76
|
Dans le tableau 3.9 sont présentés les prix
obtenus pour un Put européen de type Down & Out. Le prix initial de
l'action est S0 = 50 et le prix d'exercicede K = 50 jours. On évalue
cette option pour deux valeurs de barrières 40 et 45. Le prix moyen
donné dans ce tableau est celui de la simulation. Les CPU sont
calculés en secondes et sont ceux de l'approximation
linéaire-linéaire. Le dernier représente le temps de
calcul de la simulation.
Comme le montre ce tableau, on constate un CPU très
élevé pour le calcul des prix théoriques avec
l'approximation bilinéaire. Ceci s'explique par le fait que le nombre
d'opérations a augmenté à cause du changement de l'espace
d'états de la fonction valeur de l'option. En effet, pour
l'approximation quadratique-linéaire, la fonction valeur v dépend
uniquement de deux variables d'états St et Ht+1. Par contre,
pour l'approximation bilinéaire, la fonction
valeur w dépend de trois variables d'états qui
sontSt~1, St et Ht.
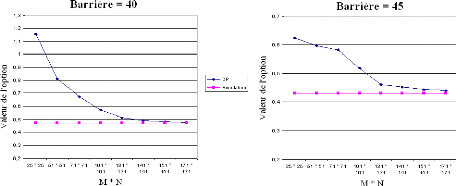
FIG. 3.1: Convergence du prix d'un Put Down & Out à
l'aide de la programmation
dynamique
TAB. 3.10: Call Européen Up & Out
|
Barrière
|
115
|
125
|
|
|
M x N
|
Lin - Lin
|
X2 MXN
|
Lin - Lin
|
X2 MXN
|
CPU (sec)
|
|
25 * 25
|
7.4140
|
****
|
9.8502
|
****
|
5
|
|
51 * 51
|
6.4376
|
95335.696
|
9.1966
|
42719.3
|
105
|
|
71 * 71
|
6.3473
|
815.409
|
8.7448
|
20412.3
|
442
|
|
101 * 101
|
5.9733
|
13987.6
|
8.1111
|
40157.6
|
1058
|
|
131 * 131
|
5.7860
|
3508.129
|
7.5244
|
34421.7
|
3016
|
|
141 * 141
|
5.6234
|
2643.876
|
7.2451
|
7800.85
|
4385
|
|
151 * 151
|
5.5841
|
154.449
|
7.1570
|
776.161
|
5481
|
|
171 * 171
|
5.5732
|
11.881
|
7.1249
|
103.041
|
8451
|
|
|
Prix moyen
|
5.5659
|
7.1319
|
|
|
Simulation
|
[5.5403 5.5915]
|
[7.0996 7.1642]
|
77
|
Dans le tableau 3.10 sont présentés les prix
obtenus pour un Call européen de type Up & Out. Le prix initial de
l'action est 80 = 110 et le prix d'exercice est K = 100 jours. On évalue
cette option pour deux valeurs de barrières 115 et 125: Le prix moyen
donné dans ce tableau est celui de la simulation. Les CPU sont
calculés en secondes et sont ceux de l'approximation
linéaire-linéaire. Le dernier représente le temps de
calcul de la simulation.

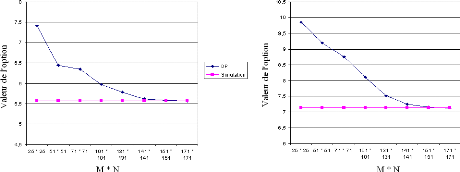
FIG. 3.2: Convergence du prix d'un Call Up & Out à
l'aide de la programmation dynamique
Comme la fonction valeur d'une option en général
est une fonction convexe, il est évident qu'une approximation
linéaire va être moins efficace qu'une fonction quadratique. En
effet, comme le montrent les deux tableaux précédents, on doit
augmenter d'avantage la discrétisation pour atteindre la convergence.
Ceci va engendrer un coût supplémentaire pour la mémoire de
la machine et du temps de calcul.
3.5 Conclusion
Dans les différents tableaux présentés
dans ce chapitre, on a pu diversifier les calculs pour regrouper une grande
partie des différents types d'options à barrière. En
premier lieu, nous avons calculé des valeurs théoriques pour
différents options à barrière pour l'approximation
quadratique-linéaire. Cette approximation a montré ses avantages
de point de vue précision
et temps de calcul et ceci en comparant les prix
trouvés par d'autres modèles de tarification. Cette approximation
est couplée avec le processus NGARCH(1,1).
En deuxième lieu, nous avons présenté les
prix obtenus à partir de l'approximation bilinéaire. Cette
approximation s'adapte facilement pour tous les processus GARCH existants, ce
qui explique la lourdeur de ce modèle. En effet, l'augmentation de
l'espace d'états de la fonction valeur de l'option a eu un impact
négatif sur le temps de calcul.
En comparant les résultats obtenus pour les deux
approximations, on constate que les prix trouvés par l'approximation
quadratique-linéaire convergent plus rapidement, c'est à dire
pour une petite discrétisation de la grille des points. Ce
résultat est prévisible. En effet, comme la fonction valeur est
convexe par rapport à S , alors une approximation quadratique sur S
approche mieux la fonction qu'une approximation linéaire. Ainsi, pour
l'interpolation bilinéaire, une taille assez de la grille est requise
pour atteindre la convergence.
Conclusion et perspectives
Ces dernières années, les options à
barrière ont connu un grand essor dans les différents
marchés financiers et ceci grâce à leurs capacités
de réduction de risque pour leurs propriétaires. Pour
évaluer ces options, plusieurs méthodes numériques ont
été présentées dans la littérature. Dans
notre travail, nous avons proposé une nouvelle procédure de
tarification de tous les types des options à barrière
basée sur la programmation dynamique sous le modèle GARCH avec
innovations gaussiennes. Les principaux avantages de notre méthode par
rapport aux autres résident dans la facilité de son
implémentation et la précision de ces résultats.
Contrairement aux autres méthodes, celle qu'on a présentée
est proche de la réalité du fait qu'elle tient compte des
différentes propriétés des séries
financières grâce au processus GARCH. La programmation dynamique
utilisée dans ce projet a été couplée avec deux
types d'approximations polynomiales.
La première approximation à laquelle on a eu
recours est donnée par une approche quadratique- linéaire sur les
deux variables d'état de la fonction valeur de l'option (prix -
volatilité). A l'aide de cette approxiamtion, nous avons obtenu
d'excellents résultats, rapides et précis. L'efficacité de
cette approximation vient du fait que la fonction valeur est convexe donc une
fonction quadratique l'approche nettement mieux qu'une autre approximation
d'ordre inférieur. La rapidité de la convergence des prix de
l'option à barrière a été démontré en
la comparant avec d'autres procédures tirées de la
littérature. Cette approximation a été utilisée
uniquement pour le modèle NGARCH(1,1). Cette restriction au
modèle NGARCH rend l'approximation plus spécifique et plus
limitée dans son utilisation.
La deuxième approximation proposée lève
cette restriction. En réduisant l'ordre de l'interpolation et en
augmentant le nombre de variables d'états de la fonction valeur de
l'option, l'approximation bilinéaire est une méthode
numérique simple à implémenter et qui s'adapte à
tous les processus GARCH. Certes cette méthode est efficace dans la
précision de ces résultats mais coûte cher de point de vue
temps de calcul.
Certes le modèle de tarification des options à
barrière par la programmation dynamique sous le modèle GARCH a
donné d'excellents résultats pour les différentes
approximations polynomiales associées, plusieurs perspectives sont
envisageables pour améliorer l'efficacité de la méthode.
Pour l'approximation quadratique-linéaire, on peut élargir
l'espace d'état de la fonction valeur pour englober tous les processus
GARCH. On subira un coût de temps de calcul supplémentaire mais
dans ce cas, on aura un algorithme général et efficace. Pour
l'approximation bilinéaire, on peut avoir recours au parallel computing
qui va effectuer des calculs en parallèle. En effet, les
éléments de la matrice de transition sont indépendants les
uns des autres. D'autre part, ce travail est extensible aux modèles
GARCH(1,1) avec innovations non-gaussiennes telles que la normale inverse
gaussienne. Enfin, une validation empirique des résultats obtenus par ce
modèle de tarification peut être réalisé et ceci en
comparant les prix théoriques aux prix du marché.
Bibliographie
[1] Ben-Ameur, H., M. Breton, J.-M. Martinez, "A Dynamic
Programming Approach for Valuing Options in the GARCH model", Avril 2008.
[2] Black, F.et M. Scholes, "The Pricing of Options and
Corporate Liabilities", The Journal of Political Economy, Vol 81(1973),
637-659.
[3] Bollerslev, T., "Generalized Autoregressive Conditional
Heteroscedasticity", Journal of Econometrics, Vol 31(1986), 307-327.
[4] Boyle, P. et Hoon Lau, S., "Bumping Up Against the Barrier
with the Binomial Method", The Journal of Derivatives, 1994.
[5] Boyle, P., M. Broadie et P. Glasserman, "Monte Carlo Methods
for Security Pricing", Journal of Economic Dynamins and Control, Vol 21(1997),
1263-1321.
[6] Cheuk, T. et T. Vorst, "Complex Barrier Options", The
Journal of Derivatives, 1996, 8-3 2.
[7] Cox, J., Ross, S. et Rubinstein, M., "Option Pricing: A
Simplified Approach", Journal of Financial Economics, Vol 7 (1979), 229-264.
[8] Duan, J.-C., "The GARCH Option Pricing Model", Mathematical
Finance, Vol 5 (1995), 13-32.
[9] Duan, J.-C., J.-G. Simonato, "American Option Pricing
under GARCH by a Markov Chain Approximation", Journal of Economic Dynamics and
Control, Vol 25 (2001), 1689-1718.
[10] Duan, J.-C., E. Dudley, G. Gauthier, J.-G. Simonato,
"Pricing Discretely Monitored Barrier Options by a Markov Chain", The Journal
of Derivatives, 2003.
[11] Engle, R. F., "Autoregressive Conditional
Heteroscedasticity with Estimates of the Variance of United Kingdom Inflation",
Econometrica, Vol 50 (1982, 987-1008.
[12] Harrison, J.-M., D.-M. Kreps, "Martingales and Arbitrage in
Multiperiod Securities Markets", Journal of Economic Theory, Vol 20 (1979),
381-408.
[13] Heston, S.-L., S. Nandi, "A Closed-Form GARCH Option
Valuation Model", The review of Financial Studies, Vol 13 (2000), 585-625.
[14] Merton, R., "Theory of Rational Option Pricing", Bell
Journal of Economics and Management Science, Vol 4 (1973), 141-183.
[15] Reiner, E. et Rubinstein, M., "Breaking Down the Barriers",
Risk, 1991, 28-35.
[16] Ritchken, P., "On Pricing Barrier Options", The Journal of
Derivatives, 1995, 19-28.
Annexe A : Matrices de transition
dans le modèle NGARCH
Le modèle NGARCH pour l'évaluation des options
s'écrit comme suit:
|
St+1 lnSt
|
= r-
|
1
2
|
\/
Ht+1 + Ht+1Et+1 (3.1)
|
Ht+1 = /30 + /31Ht + /32Ht(Et - À - O)2
(3.2)
Q
Et+1 j Ft~ N (0, 1),(3.3) On pose 'y = O + À, s = St,o
= St-1, y = Ht+1 et h = Ht. A partir des équations (3.1) et (3.2), nous
allons déterminer le terme d'erreur Et en fonction des variables du
modèle.
Ainsi, l'équation (3.1) donne :
ln(8 o ) - r + h 2
a(o, s, h) = p
h
L'équation (3.2) donne deux formes de Et données
par les fonctions f1 et f2 comme suit:
s
y - /30 - h/31
f1(y,h) = 'y + , y ~ /30 + h/31
h/32
s
y - /30 - h/31
f2(y, h) = 'y - , y ~ /30 + h/31
h/32
Maintenant, en appliquant ces équations aux points de la
grille MN, ces formules deviennent:
|
aikl =
|
ln(ai) -- r + dl ak 2
|
|
bl
|
|
1jl
2jl
|
=
=
|
8 < : 8
'Y
<
:
|
+
--
|
qd3-00-dl01
si d e0+ do1
dl02
00 sinon
si dj > !B0+ dl/1
d3-00-dl01
dl02
+oc sinon
}
}
On note ainsi que l'événement ak exp(r -- bl
2+ NdlE) 2 [ai, ai+1) correspond à l'événement
E 2 [aikl, ai+1,kl)
· De même, on note que
l'événement y 2 [dj, dj+1) correspond à E 2 [ 1 jl,
1j+1,l)u [ 2j+1,l, 2
jl)
· Afin de tenir compte de ces deux contraintes, on
pose les nouvelles
bornes suivantes :
c1;ijkl= maxfaikl, 1 jlg
c2,ijkl = minfai+1,kl, 1 j+1;lg
c3,ijkl = maxfaikl, 2 j+1;lg
c4;ijkl= minf ai+1,kl , 2jl1
Ainsi, on a :
{ [aikl, ai+1,kl) n [ 1jl, 1j+1,l) =
[c1,ijkl, c2,ijkl) si c1,ijkl Ç c2,ijkl
0 sinon
[aikl, ai+1,kl) n [..1+1,l, ..72.l) = [c3,ijkl, c4,ijkl)
{
25 si c3,ijkl c4,ijkl
sinon
On rappelle que les matrices de transition pour l'approximation
quadratique-linéaire sont :
|
avec
|
Aklij = Eakdl[1[(Rij)]
Cklij = Eakdl[Ht+21[(Rij)] Eklij =
Eakdl[S2t+11[(Rij)]
|
,
,
,
|
Bklij = Eakdl[St+11[(Rij)] , Dklij = Eakdl[St+1Ht+21[(Rij)] ,
Fklij = Eakdl[S2t+1Ht+21[(Rij)].
|
Rij = {St + 1 E [ai, ai+2) et Ht+2 E [dj, dj+1)}
Afin d'alléger l'écriture des formules de ces
matrices, on pose Cp,ijkl = cp pour p E {1, 2, 3, 4} et on pose :
1[1= 1[(C2 > c1)
1[2 = 1[(C4 > C3)
Si on pose 4) la fonction de répartition de la loi normale
centrée réduite, les matrices de transition s'écrivent
alors :
Aklij = Eakdl[1[(Rij)]
= 1[1(4)(C2) -- 4)(C1)) +1[2(4)(C4) -- 4)(C3))
Bklij = Eakdl[St+11[(Rij)]
= aker (1[1(4)(C2--'Vdl) -- 4)(c1 --/'Vdl))
+(1[2(4)(C4 -- 'Vdl) -- 4)4 -- \Ml)))
Cklij = Eakdl[Ht+21[(Rij)]
= Aklij(~0 + ~1dl + e2dl(1+-2))
1[1e2dl (c2e--
e--1c2-- 2,7 (e--12c22--
e--1c21)
N/2R-
(e2dl1c2 1 c
1[2 a4e--2 4 -- c3e-- 2 c2 3 -- 2-y (e-- 1 2 c2 2 4--
e--2 3))
N/27r
Dklij = Eak dl [St+1Ht+2I(Rij )1
= Bklij (80 + Q1dl + 2 dl (1 + -y --
N/dl)2)
akere2dl2 2
(c2 -- N/dl) (c2-,/dl) -- (c1 -- N/dl) e-2(c1- \Ml)
N/27r
2 (-y -- N/dl) (e-12(c2-,/dl)2--e-12.(c1-,/dl)2)
T
ake e2dl ( (
I2c4-- N/ ) dl e-12. (c4-,/dl)2 -- (c3 --
N/ ) dl e-12. (c3- \Ml)2
27r
2 (-y -- N/dl) (e-12(c4-,/dl)2 -- e-2(c3-,/dl)2))
Eklij = Eakdl[S2t+1I(Rij)1
(= a?,e2r+dl I1 ((D (c2 -- Wdl) -- 4e (c2 -- Wdl)) +I2
(l) (c4 -- Wdl) -- 4) (c3 -- Wdl)))
)2) )
Fklij = Eak dl [S2t+ 1Ht+2I(Rij )1
= Eklij (8 0 + !B1dl + e2dl (1 + (-y -- 2N/dl
a2 e2r+dl /32d? (C2 I1
C2 -- Wdl) e-2(c2-2,/dl) 2
- -- Wdl) e-12(c1 -2,/dl )2
N/27r
2 (-y-- 2N/dl) (e-12(c2-2,/dl)2 -- e-12-(c1-2,/dl)2) k
Na
2 e2r#177;di e 2d?
I2 a (c4 -- 2 N/dl) e-2(c4-2,/dl)2
(c3 -- Wdl) e-2(c3-2\Ml)2
(c4-2,/dl)2 1-- e-12(c3-2,/dl)2)
7r
2 (-y -- Wdl) (e-
Annexe B : Constantes de
l'interpolation bilinéaire
Pour l'approximation bilinéaire, on rappelle que la
variable Ht+1 est déterministe et se calcule à partir
de l'équation suivante:
Ht+1 = g'(St-1, St, Ht)
avec g' la fonction spécifique du modèle
GARCH.
En appliquant cette formule aux points de la grille MN, on a pour
j, k = 1, ..., M et l = 0, :::, N
Gjkl = g'(aj, ak, dl)
Les constantes utilisées pour le calcule de la valeur de
détention de l'option à barrière dans l'approxiamtion
bilinéaire sont:
T 1 jkli = Etjkl[T[(St+1 2 [ai,ai+1))]
T 2 jkli = Etjkl[St+1T[(St+1 2 [ai,ai+1))]
Doncpourj,k=1,...,M,l=0,...,Neti=0,...,M
T 1 jkli = Etjkl[T[(St+1 E [ai,ai+1))]
|
0
= ~ @
|
(ln
|
~
ai+1 - r + Gjkl ak2
|
1 0 ( ai ~
ln - r + Gjkl
ak 2
A - ~ @ pGjkl
|
; pour i = 1, ..., M - 1
|
|
JGjkl
|
0 (ai+1 ~ 1
- r + Gjkl
(ln ak 2
T 1 jkl0 = A , pour i = 0
pGjkl
0 ( ai ) 1
- r + Gjkl
(ln ak 2
T 1 jklM = 1 - ~ A , pour i = M
pGjkl
T 2 jkli = Etjkl[St+1T[(St+1 E [ai,ai+1))]
0 0 (ai+1 ~ 1 0 ( ai ~ 1
1
ln - r + Gjkl ln - r + Gjkl
ak 2 ak 2
= aker @~ @A - ~ @A
pGjkl pGjkl A , pour i = 1, ..., M - 1
0 (ai+1 ) 1
- r + Gjkl
@ln ak 2
T 2 jkl0 = ake r A , pour i = 0
pGjkl
( ai ~ 1 1
0 0
T 2 jklM = aker @1 - ~ @
ln - r + Gjkl
ak 2 A A , pour i = M
pGjkl
| 

