III.4.2. calcul de la jacobienne
analytique
Puisque la rotation est
spécifiée par les angles de RTL, les vitesses sont
calculées par la relation . Un programme de vérification a été fait, toujours
afin de valider les résultats, il est indiqué par le
schéma présenté ci dessous : . Un programme de vérification a été fait, toujours
afin de valider les résultats, il est indiqué par le
schéma présenté ci dessous :
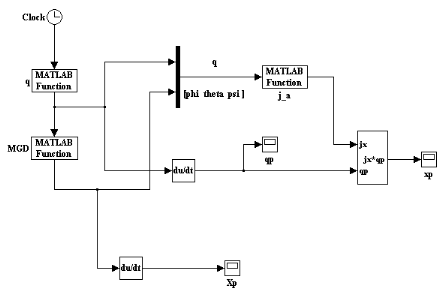
Figure III.4.
Description du programme utilisé pour la validation de la
jacobienne analytique
Les valeurs de q et X sont
les mêmes que ceux de la section précédente.
Les résultats de la simulation du programme
(Figure III-5), interprètent la validité de la
jacobienne analytique utilisée et donc le modèle
cinématique calculé.
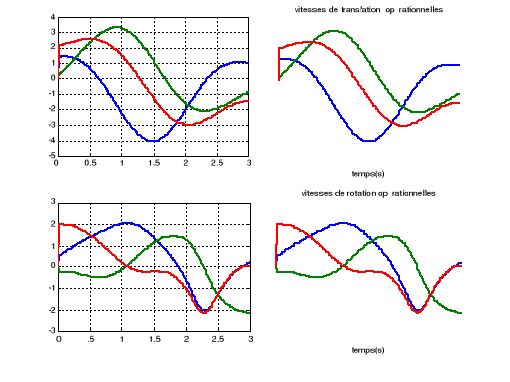
Figure III.5. Les
vitesses opérationnelles par l'utilisation de la jacobienne
analytique
III.4.3. Les positions de singularité
Les positions singulières (Figures III-6.a, b
et c ) sont les solutions de l'équation
:


La résolution de cette équation donne les
positions singulières suivantes :

La singularité  (figure III-6.a), correspond à une
configuration dans laquelle le centre du poignet est confondu avec l'axe
z0 et le robot est en extension maximale (singularité
d'épaule). (figure III-6.a), correspond à une
configuration dans laquelle le centre du poignet est confondu avec l'axe
z0 et le robot est en extension maximale (singularité
d'épaule).
Pour  , les deux articulations commandant , les deux articulations commandant  et et ont leurs axes confondus et le poignet se plis sur lui-même
lorsque ont leurs axes confondus et le poignet se plis sur lui-même
lorsque  (figure III-6.b) , ce qui fait perdre un
degré de liberté au robot . Dans cette configuration le
modèle cinématique ne permet pas de commander une rotation
autour de la normale au plan contenant les axes 4,5 et 6 (singularité du
poignet). (figure III-6.b) , ce qui fait perdre un
degré de liberté au robot . Dans cette configuration le
modèle cinématique ne permet pas de commander une rotation
autour de la normale au plan contenant les axes 4,5 et 6 (singularité du
poignet).
Lorsque , le centre du poignet est confondu avec le point
O2 (figure III-6.c), mais c'est
impossible de tomber dans ce cas puisque , le centre du poignet est confondu avec le point
O2 (figure III-6.c), mais c'est
impossible de tomber dans ce cas puisque  est toujours positive (articulation prismatique). est toujours positive (articulation prismatique).
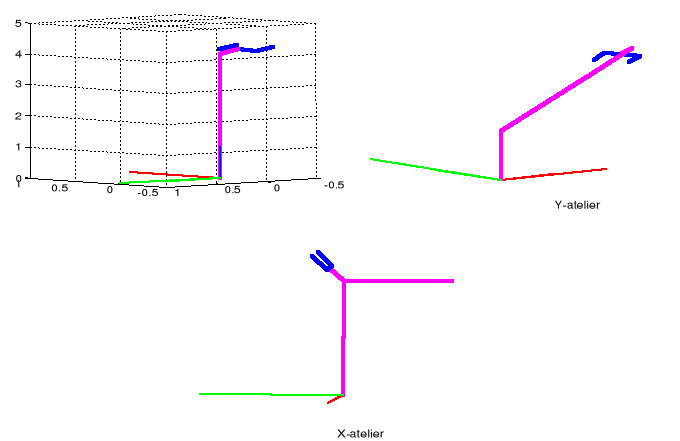
Figure III.6.
Quelques positions singulières du robot
| 

