3. Méthode des théorèmes
généraux
Il est intéressant d'appliquer ces
théorèmes à la fois dans le référentiel fixe
(absolu) et dans le référentiel mobile lié au
châssis pour comparer les résultats. Mais, par soucis de
simplification, nous ne travaillerons que dans le référentiel
mobile. Les résultats du référentiel fixe seront repris
dans les annexes (Annexes 2).
R15
z1
y1
x1
R6
è2
R16
R11
R8
R13
R9
è1
R4
R10
R7
R5
R7
R12
R12
R3
R4
R10
R13
R8
R9
R1
R11
R14
R6
R5
R2
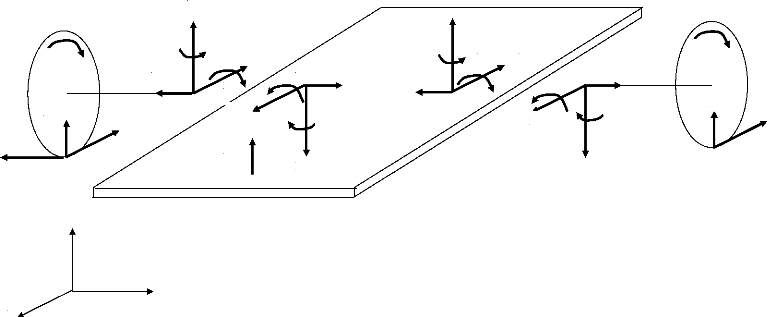
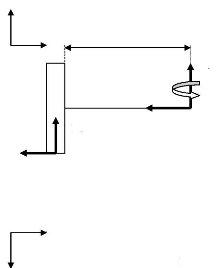
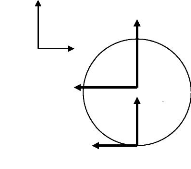
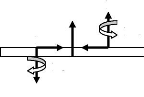
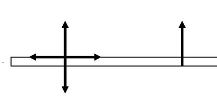
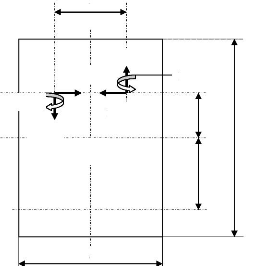
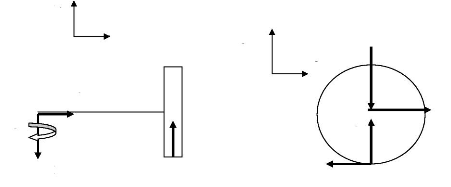
3.1. Diagrammes des corps rendus libres
Roue 1
z1
x1
R4
y1
y1
R2
r
R6
R8
R5
R3
z1
R6
x1
R4
R3
R1
R1
R2

R5
Figure 6 : Projections orthogonales de la roue 1
rendue libre
R14
R11
R5
R10
R8
R6
R13
R14
R11
R9
b
R4
R6
f
R9
R12
R5
R7
e
R10
R4
O2
d
l
c
Châssis
R12

R10
R9
X3

R15
Roue 3
z3
y3
Z3
R11
X3
R16
R15
R11
R13
R10
R9
R15
Y3

MR
& & & &
(39)

2
(è 1 +è3)
=
R R
-
4 9
3.2. Théorème de la résultante
cinétique
3.2.1 Roue 1
Ce théorème, appliqué à la roue 1,
donne :
? ? ? ?
d?
m . vG mg z R R x R R y R R z
= - . 1 (
- + - + + +
1 1 1 4 ) . 1 (
1 2 5 ) . 1 (
1 3 6 ) . 1 (33)
1
dt
De l'expression (4):
d ? ? d ? ? ?
è & & + . . 1
è & x R x R

dt
è & & + . . . 1
& & y (34)
è á
vG R x R
= . . 1
= . . 1
1 1 1 1 1 1 1 1 1
dt
Comme nous dérivons dans un référentiel
mobile, nous pouvons aussi faire usage du vecteur de DARBOUX pour
arriver au même résultat (Voir plus loin).
Soit, en le projetant sur différents axes:
mR è& & 1 = - (
R1+R4) (35)
mR .è & 1 .á &
= - (R2 +R5) (36)
R 3 + R6 =
m.g (37)
3.2.2 Châssis
Appliqué au châssis, il donne :
? ? ? ? ?
d
m . vG Mg z R R x R R y R R R z
= - . 1 (
+ - + - + + -
2 1 4 9 ) . 1 (
1 5 10 ) . 1 (
1 11 14 6 ) . 1 (38)
1
dt
Soit, en le projetant sur les axes :
MR
2
.
|
d
dt
|
?
MCG
|
1
|
=
|
d
dt
|
?
MCG1
rel
|
? ?
+ ù 1 ? MC
Darb 1 (48)
G
|
|
(è&1 + è
& á & = - (40)
3 ). R R
5 10
R 14 + R 11 - R 6 = M
. g (41)
3.2.3 Roue 3
Appliqué à la roue 3, il donne :
? ? ? ?
d?
m . vG mg z R R x R y R R z
= - . 1 (
+ - + + -
3 1 9 15 ) . 1 1 10 . 1 (
1 16 11 ) . 1 (42)
1
dt
Soit, en le projetant sur différents axes:
mR è& & 3 = R 9 - R
15 (43)
mR . è & 3. &
á= R 10 (44)
R 16 - R 11 = m . g (45)
3.3 Théorème du moment cinétique
3.3.1 Roue 1
Le moment cinétique de la roue 1 en son centre de masse
est donné par :

? ?
MCG 1 = I1 .ù 1
(46)
Soit :
? mR
2
? ?
MCG = (2 . 1
è & y + z
á & . 1 ) (47)
1 1 1 1
4
La dérivée, dans la base mobile, de l'expression
(47) sera :
?
ùDarb 1 est le vecteur de Darboux et vaut :
? ?
ù Darb 1 = á & . 1 z
1 (49)
d
? mR
2
? ? ?
. MC = ( 2 . . 1 2 . 1
- & áè & x á
& & . 1 ) (50)
1 1 1 + y
è & & 1 1 + z
dt
G 1
4
Le moment des forces extérieures dans la base (x1,
y1, z1) est :
? ? ? ? ? ? ? ? ? ? ? ?
Mext R z R x R y R z r y R x R y R z R x C y R z
= - 1 ( 1 - 1 1 ) 1 ( 1 1 1 ) 1 1 1 )
1 1 × - 1 1 2 1 + +
3 1 1 × - 4 1 - 5 1 + -
6 1 7 1 + (51)
1 1 + 8 1
Soit :
? ? ? ?
Mext R r R R R x R R C y R r R z
= ( . - - + + + + (52)
1 6 2 . ) . 1 ( . ) . 1 ( . ) . 1
7 1 1 1 1 4 8 1
Partant des expressions (50) et (52), le théorème
du moment cinétique, projeté sur différents axes,
s'écrit :
mR 2
2
è & á & =
1 . R r R R R
- (53)
6 . - 2 . 7
mR 2
2
mR 2
è& & = R R C
+ (54)
1 1 . 1
á& & = +
R R r
. (55)
8 4
4
3.3.2. Chassis
Le moment cinétique du châssis en son centre de
masse est donné par :

? ?
MCG 2 = I2
.ù2 (56)
Avec :
? ?
ù 2 = á&. 1 z 1
(57)
Soit :
2 2
? M c d
( + ) ?
MCG = á& (58)
. 1 z
2 1
12
La dérivée, dans la base mobile, de l'expression
(58) sera :
.
|
d
dt
|
?
MC G
|
2
|
=
|
d
dt
|
?
MCG2
rel
|
? ?
+ ù 2 ? MC
Darb 2 (59)
G
|
|
?
ùDarb 2 est le vecteur de Darboux relatif au
châssis et vaut :
? ?
2 2
d ? +
M c d
( ) ?
ùDarb 2 = á&. 1
z1 (60)
. MC
= á&& (61)
. 1 z
dt
G 2 1
12
Le moment des forces extérieures dans la base (X1,
y1, z1) est :
?
Mext
|
? ?
? - e ?
? ?
f
= ? - ?
2 ? 2 ?
? ?
b
? ?
? 2 ?
|
(
|
x1 , y 1 , z1 )
|
|
(
?

?
?
? [ ?

R4 l 0

? R5 + 0 A 0 + A - RH
R6
? ?( x1 , y 1 , z 1
)-b R 14
?(x1 , y 1 , z 1
)f2b e
(
2
?
x1 , y 1 , z1 )








R 11

R9
? ?
? R R
-
7 12 ?

(62)
+ 0
? ?
? ? R R
- ?
1 , y1 , z1 )
x y z
1 , 1 , 1 ) 13 8 (
? x
Ou bien :

(
2
?
x1 , y 1 , z1 )
( +R11).
6
b
(R 10 - R5). 2 + R7 -
f+ 2
R12 ?
R
2 = I (R 4 - R9 ).
b +(R 11 , R6 ).
e-R14
2

.l (63)
Mext
( )e + (R 4 +R9).
R 13 - R8
x1 , y 1 , z1 )
f+ 2
(
R 10 R5
Partant des expressions (61) et (63), le théorème
du moment cinétique, projeté sur différents axes,
s'écrit :
(R 6 + R11 )+b
(R10 - R 5 ) + R 7 -
R12 = 0 (64)
2 2
b (R4 - R9 )
+ e.( R 11 - R6 )- l. R
14 = 0 (65)

2
(66)
2 d2 \
M ( c +
)á&& = 2
f
12 (R 4 + R 9) +
e. (R 10 - R 5) + R 13 -
R8
3.3.3. Roue 3
Comme pour la roue 1, on aura :

? ?
MCG 3 = I 3 .ù 3
(67)
Soit :
? mR
2
? ?
MCG = (2 . 1
è & y + z
á & . 1 ) (68)
3 3 1 1
4
La dérivée, dans la base mobile, de l'expression
(68) sera :
a
? mR
2
?
? ?
. MC = ( 2 . . 1 2 . 1

- á & è & x á
& & . 1 ) (69)
3 3 1 + y
è & & 3 1 + z
at
G 1
4
Le moment des forces extérieures dans la base (x1,
y1, z1) est :
? ? ? ? ? ? ? ? ? ? ?
1 ( 1
1 ) 1 ( 1
1 ) 1 1
Mext = - R z R x R z r y R x R y R z R x C y R
z
1 11 1
1
× - + - × + - - + -
3 1 15 1 16 1
1 9 1 10 1
12 1 3 1 13 1
(70)
Soit :
? ? ? ?
Mext R r R x R R C y R r R z
= ( . ) . 1 ( . ) . 1 ( . ) . 1
+ + + + - (71)
3 11 12 1 15 3 1 9 13 1
Partant des expressions (69) et (71), le théorème
du moment cinétique, projeté sur différents axes,
s'écrit :

2
mR
2
2
mR
2
2
mR
è & á & = R r
R
+ (72)
3 . 11 . 12
è& & = R R C
+ (73)
3 15 . 3
á& & = R r R
4
- (74)
9 . 13
3.4. Système d'équations à
résoudre
Les équations (35), (36), (37), (39), (40), (41),
(43), (44), (45), (53), (54), (55), (64), (65), (66), (72), (73) et (74)
constituent le système de 18 équations différentielles
à 18 inconnues à résoudre avec MATLAB.
Les simplifications et substitutions conduisent au
système suivant : De l'équation (54), on trouve :
2 . 2
R R + C
1 1
è& & = 1 (75)
.
m R 2
De (73), on a :
.
i=2 /65 +2C3 (76)
m R 2
(76) dans (35), on tire :
R1 = R4. R +2
C1 (77)
3R
De (36), on tire :
R2 = 2m+M (-R10
-m.R . di. et) (78)
M
De (37), on a :
R 3 = m. g -
R6 (79)
De (65), on tire :
R =
4 [ ( 6
2 e R R l R R
- +
11 ) . 14 ] 9
+ (80)
b
(44) et (36) dans (40), avec (78), on a :
M
R 5 = R10-
2 m+MR2 (81)
(75), (76) et (80) dans (39) donne :
R6= b .m (R1
+R15) - l R14-R11 (82)
e
(2 m+M).e
(53), avec (36), donne :
R 7 = r . R6 +
mR2 uA1 xi R.
R2 = 2r.R 6
3R.R2 R.R5 (83)
2 2
2
mR
R = á&& - (84)
r R
.
8 4
4
De (66), on a:
M c d
2 2
2 (
? + ) ?
R = á&& + e R R R R
.( - + -
9 5 10 ) R (85)
8 13 4
?? -
f ?? 12
De (64), on a :
2 ? -
b ?
R = ( 5
R R R R R
10 ) 12
+ - - (86)
11 7 6
f ?? 2 ??
De (72), avec (44), on tire :
(87)
mR 2 R R
. + 2 .
r R
10 11
R = - è & á &
-
. r R
. = -
12 3 11
2 2
(74) devient :
2
mR
R = r R -
. á&& (88)
13 9 4
(65) devient :
R14 = R6-R11+Mg (89)
(76) dans (73), on tire :
R R C
. 9 2 3
-
3
(90)
R15
R
(45) devient :
R16 = m. g +R11
(91)
| 

