I.6. Amortissement non classique
Certains systèmes conduisent à des valeurs
d'amortissement très contrastées entre les différentes
parties de l'ouvrage. Cette situation se rencontre par exemple pour
l'étude des phénomènes d'interaction sol-structure ou
fluide-structure (figure I.4). Généralement les structures
présentent des pourcentages d'amortissement équivalents
relativement faibles, de l'ordre de quelques pourcents (tableau I.4), alors que
le milieu avec lequel elles interagissent peut présenter des
amortissements plus élevés (cas du sol où la valeur peut
atteindre plusieurs dizaines de pourcents) ou du fluide dans lequel il est au
contraire très faible (inférieur à 1 %)[2].
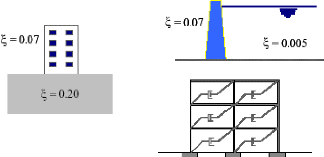
Figure I.4 : Systèmes à
amortissement contrasté
Dans le même ordre d'idée, l'utilisation
d'amortisseurs concentrés conduit également à des valeurs
contrastées de l'amortissement entre les différentes parties du
système. Cette technique est utilisée par exemple pour
l'isolation vibratoire des machines vibrantes, la conception ou le renforcement
de structures en zone sismique, l'idée étant d'accroître la
dissipation d'énergie et donc de limiter la part de l'énergie
transmise à l'ouvrage. Lorsqu'une structure est composée d'un
assemblage de plusieurs matériaux, l'usage veut que l'amortissement
modal équivalent soit calculé au prorata de l'énergie
élastique de déformation Ei emmagasinée dans chacun des
matériaux [2].
? î E
i i
î = (I.8)
eq
i
? E
Il peut cependant être nécessaire de construire
une matrice d'amortissement lorsque le recours à des calculs par
intégration temporelle s'avère indispensable pour la prise en
compte de systèmes partiellement non linéaires.
Plusieurs techniques sont envisageables: définir a
priori la forme de la matrice d'amortissement, construire cette matrice
à partir de la donnée de l'amortissement modal ou, lorsque cela
est possible, construire la matrice d'amortissement à partir des
données géométriques et mécaniques du
système (amortisseurs localisés). Les deux premières
approches conduisent à un amortissement qualifié d'orthogonal car
la diagonalisation de la matrice d'amortissement sur la base des modes propres
est préservée. La dernière approche conduit
généralement à un amortissement non classique qui
nécessite le recours à des techniques de résolution
spécifiques pour la résolution sur la base des modes [2].
I.7. Construction de la matrice d'amortissement
I.7.1. Amortissement de Rayleigh
On se donne à priori la structure de la matrice
d'amortissement sous la forme d'une combinaison linéaire de la matrice
de masse et de la matrice de rigidité [2].
C =á?M
+â K (I.9)
·
·
·
M U + CU +KU = F(t)
(I.10)
Il est évident que dans ce cas, la
propriété d'orthogonalité de la matrice d'amortissement
par rapport aux modes propres est préservée. En reportant
l'équation (I.9) dans l'équation générale de la
dynamique (I.10) et en faisant usage de cette propriété,
l'équation du mouvement s'écrit :
|
m y t
& & + á + â & +
m k y t k t y p t j N
j j ( ) ( j j j
) ( ) ( ) =
j j j ( ) , = 1,
D'où il ressort que le pourcentage d'amortissement
critique équivalent s'exprime par[2] :
|
(I.11)
|
|
1 ? á
î = +âù
j 2 ?? ? ù j
|
j
|
?
?? ?
|
(I.12)
|
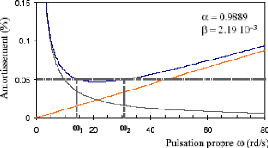
L'amortissement donné par l'équation (I.12) se
compose de deux termes, l'un proportionnel à la pulsation et l'autre
inversement proportionnel à celle ci. Comme en général,
il
est souhaitable de représenter la dissipation
d'énergie dans le système par un amortissement indépendant
de la fréquence, un choix approprié des valeurs de a et â
permet de satisfaire, de façon approximative, cette condition. La
détermination de a et â est illustrée sur la figure I.9
pour le portique de la figure I.8 : en se fixant deux valeurs de pulsations, w1
et w 2, pour lesquelles l'amortissement donné par l'équation
(I.12) prend la valeur recherchée, il s'ensuit qu'entre w1 et w2
l'amortissement est sensiblement égal, quoique légèrement
inférieur, à la valeur recherchée. La première
pulsation w1 est prise égale à celle du mode fondamental du
système et la seconde w2 à la plus grande pulsation ayant un
intérêt pour cette modélisation de l'amortissement est
classiquement utilisée pour la réalisation de calculs temporels
sur des systèmes comportant une partie pseudo-élastique, pour
laquelle il est nécessaire de spécifier un amortissement
équivalent, et une partie non linéaire dans laquelle la
dissipation d'énergie est directement prise en compte par la loi de
comportement du matériau.
FigureI.8 : Amortissement de
Rayleigh
On notera que seule la combinaison linéaire de la
matrice de masse et de la matrice de rigidité permet de donner un
amortissement sensiblement indépendant de la fréquence.
L'utilisation d'un seul de ces termes donnerait naissance à un
amortissement dépendant de la fréquence dont la
réalité physique est généralement prise en
défaut [2].
| 

