Chapitre IV : Application numérique sur
un oscillateur simple
Application numérique sur un oscillateur
simple
IV.1. Introduction
Ce chapitre est consacré à une application
portant sur un oscillateur simple. Nous nous intéressons plus exactement
à la variation du déplacement en fonction de la variation de
l'amortissement en considérant comme source d'excitation le signal
sismique d'El Centro.
Nous présentons d'abord l'aspect théorique, suivi
d'un organigramme qui résume les étapes de calcul des
déplacements.
L'exploitation de cet organigramme nous a permis
d'élaborer un programme en FORTRAN dont les résultats de
simulation sont représentés graphiquement.
IV.2. Formulation mathématique du
problème
On considère un oscillateur simple lié au sol et
caractérisé par sa pulsation ù et son coefficient
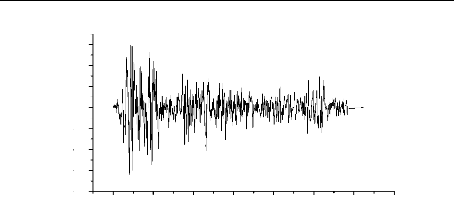
d'amortissement î. Il est soumis aux effets d'un séisme, c'est
à dire que son point d'appui se déplace avec une
accélération du sol donnée par un
accélérogramme, comme par exemple celui d'El Centro du 18 mai
1940.

Figure IV.1 Oscillateur simple
chapitre IV Application numérique sur un oscillateur
simple
0 5 10 15 20 25 30 35
acceleration m/s2
-0,1
-0,2
-0,3
-0,4
0,3
0,2
0,1
0,0
tem ps s
Graphe IV.1 : Signal séismique d'
El- centro
On calcule les déplacements dus au signal sismique avec
différentes valeurs
d'amortissement à l'aide de l'intégral du Duhamel
:
1
u(t) = ? - (t - )
p îù ô
( ) e
ô sin ( )
ù t d
- ô ô
D
mùD
t
0
(IV-1)
Cette équation est appelée intégrale de
Duhamel, qui est basée sur le principe de superposition. Elle n'est
applicable qu'à des systèmes linéaires.
Pour calculer numériquement cette réponse, on a
:
sin (ùDt- ùDô)=sinùDt
cosùDô - cosùDt sinùDô
Donc :
t t
sin t
(IV-2)
ù c os ù D t -
(t - )
u(t) = D ? - (t- )
îù ô
ô ( ) e îù ô
ù ô ô
( ) e
p cos( ) d - ? p ô sin( )
ù ô d ô
D D
m ù m ù
D 0 D 0
t îùô
1 e
(IV-3)
Posons : A(t)= p ( )
ô ù ô d ô
îù D
? t cos( )
m ù e
D 0
et
t îùô
1 e
(IV-4)
B(t)= p ( )
ô ù ô d ô
îù D
? t sin( )
m ù e
D 0
L'équation IV-2 prend la forme suivante:
u(t)= A(t) sinùDt - B(t) cosùDt (IV-5)
En résolvant ces intégrales, on détermine
la réponse u(t). Le chargement dynamique p(t)
..
est dû à une accélération ( )
a t d'un signal sismique (El-centro 18 mai 1940
composante SO-
OE par exemple),
Notons que la force effective due à cette
accélération est donnée par :
..
Peff(ô)=-m ( )
a ô
Donc :
t
1 .. - (t- )
u(t) = - ? a îù ô
( ) e
ô sin ùD ( t
d
- ô ô
ùD
0
(IV-6)
|
1 t..eùô
A(t)= - ? a ( )
ô cos( )
ù ô ô
D d
îù t
ù e
D 0
1 t..eùô
B(t)= - ?a (ô ) sin( )
ù ô ô
D d
îù t
ùe D 0
|
(IV-7)
(IV-8)
|
On ne peut pas résoudre ces intégrales par les
méthodes classiques. On utilise alors un procédé de
sommation :
Ät 1 A
Donc :
A(t)= -
××Ó (t)
ù D ò
(IV-9)
|
Ät 1 A B(t)= - ×
×Ù (t)
ùD ò
|
(IV-10)
|
Parmi les méthodes de résolution, il existe trois
qui sont les plus souvent utilisées : méthode par simple
sommation, méthode de trapèze et méthode de Simpson.
1. Simple sommation (q=1) :
A A ..
? ?(îù t )
Ó = Ó - Ä + - Ä ×
( ) ( ) ( ) cos ( )
t t t a t t ù t t e - Ä
- Ä × (IV-11)
D
?? ?? 1 1
A A ..
? ? ( - Ä
îù t )
( ) ( ) ( (IV-12)
Ù = Ù - Ä +
t t t a t t ) sin (
- Ä × ù t t
- Ä ) × e
D
?? ??
1 1
2. Méthode des trapèzes
(ò=2)
A ? A ? ..
..
( ) ( ) ( ) cos ù ( ) îù (
) cos ù
? Ä t
t = ? t t a t t D t t e ( )
Ó Ó ? Ä + ? Ä × ? Ä ? × +
×
a t D t (IV-13)
? ?
2 ? 2 ?
A A ....
? ? ? Ä
îù t
Ù ( )
t = ( t t a t t
) ( ) sin ù ( t t ) e ( ) a
t
( ) sin ù t (IV-14)
D D
Ù ? Ä + ? Ä × ? Ä × + ×
?? ??
2 2
3. Méthode de Simpson (G=3)
A
Ó
(t)
3
A ..
? Ó ( 2 ) ( 2 ) cos
t ? Ä + ? Ä ×
t a t t
?? 3
? îù t t
t t e a t t t t e ( ? Ä
îù
ù ù
D ( 2 ) + ? ? Ä ×
..
( 2 )
)
? Ä 4 ( ) cos ( ) ?
? Ä ? Ä
× ×
D
?? ?? ??
|
..
+ a(t) × cos
ùDt
|
(IV-15)
|
..
-
2) sin
Ä ×
t

(t-2Ä t) + a(t
A? A
Ù Ù
( )
t = ?
?
3 ? 3
? ? ..?
)
t t e ( 2 )
- Ä
îù t îù t
ù D ( 2 ) 4 ( ) sin ( )
a t t ù D t t e (
- Ä - Ä
? × + ? - Ä × - Ä ? ×
? ? ? ? ? ?
|
..
+ a(t) × sin ùDt
|
(IV-16)
|
La précision attendue ici de la solution dépend
évidemment de la durée de l'intervalle At. En
général, cet intervalle doit être choisi suffisamment court
à la fois pour que la fonction de
T
chargement et les fonctions trigonométriques soient bien
définies : Ät10 .C'est la règle
pratique qui est largement utilisée et qui donne de bons
résultats.
La précision et le volume des calculs
nécessaires augmentent avec l'ordre du procédé de
sommation. En règle générale, la précision accrue
que procure la méthode de Simpson justifie son utilisation en
dépit d'une plus grande complexité numérique.
Les résultats obtenus sont représentés dans
les graphes suivants avec différentes valeurs de coefficients
d'amortissements et pulsations :
L'organigramme suivant résume les différentes
étapes de résolution de ce problème
Organigramme de résolution
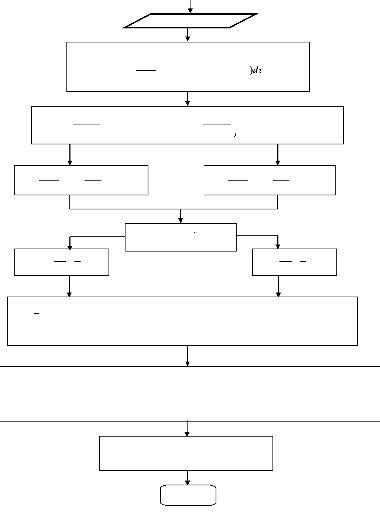
m
ùD
Lecture des données
t t
u(t) = sinùD t) e
-îù (t- ô) cos( ùD
ô)dô- cosùDt ?
?
ùD
0
- (t- )
p ( ) e îù ô
ô sin( )
ù ô d ô
D
Intégral DUHAMEL
u(t) = 1 ? p (ô )
e- 4o(t- ô) sin
ùD ( t -
mùD
t
0
t1
e4oô
A(t)= p ( )
ô ù ô d ô
îù D
? t cos( )
mùe
D 0
t1
e4°ô
B(t)= ? t
p ( )
ô sin( )
ù ô d ô
îù D
m ù e
D 0
Ät 1 A A(t)= - × × Ó
(t)
ùòò
D
Peff(ô)=-m ( )
a ô
Ät 1 A B(t)= - ×
×Ù (t)
ùD ò
A
Ó
(t)
cos
3
..
? A
Ó ( 2 ) ( 2 )
t ? Ä + ? Ä ×
t a t t
??
3
? îù t ( - î
ù t t e a t t ù t t e
D ( 2 ) + ? - Ä ×
..
( 2 )
- Ä 4 ( ) cos ( ) ?
- Ä - Ä
× ×
D
?? ?? ??
..
+ a(t ) ×
cos
ùD t
u(t)= )= A(t) sinùDt - B(t) cosùDt
A? A
Ù Ù
( )
t = ?
?
3 ? 3
? ? .. ?
t t e ( 2 )
- Ä
îù t îù t
ù D ( 2 ) 4 ( ) sin ( )
a t t ù D t t e (
- Ä - Ä
? × + ? - Ä × - Ä ? ×
? ? ? ? ? ?
)
..
+ a(t) × sin ùDt
(
sin
..
t - 2Ä t ) + a(t -Ä
t) ×
2
FIN
Début
| 

