Conception et réalisation d'un robot mobile à base d'arduino( Télécharger le fichier original )par Hocine TAKHI Université Amar Telidji - Instrumentation 2014 |

RésuméCe projet concerne la conception, la réalisation et la commande d'un robot mobile à trois roues a l'aide d'une carte électronique" Arduino" adapté pour pouvoir la relier au robot après avoir développé le programme en logiciel Arduino ,son rôle est de détecter une source de flamme quelconque et l'éteindre. Mots clés :robot mobile -Arduino - AbstractThis project involves the design, implementation and controlling of a mobile robot with three wheels with an electronic card "Arduino" adapted to be able to connect to the robot after developing the program in Arduino software, its role is to detect any source of flame and extinguish it. Key Words: mobile robot -Arduino - Sommaire Liste des figures I Liste des tableaux VI Introduction général 1 Chapitre 1 : Généralité sur les robots
3.1. Les composants internes d'un microcontrôleur 40 3.2. Les types des microcontrôleurs 42 3.3. Langage de programmation d'un microcontrôleur 43 3.4. Domaines d'applications des microcontrôleurs 44 4. Arduino 46 4.1. C'est quoi l'Arduino? 46 4.2. Bref historique de l'Arduino 46 4.3. Matériel arduino 46 4.4. Logiciel Arduino 47 4.5. Les avantages de l'arduino 49 5. Conclusion 49
3.1. La réalisation des circuits 64 3.2. La réalisation de carcasse du robot 65 5. Le teste de robot 74 6. Conclusion: 76 Conclusion générale: 78 Annexe A : Les tableaux d'étalonnage 79 Annexe B : Algorithme et programme 88 Bibliographie I Liste des figures
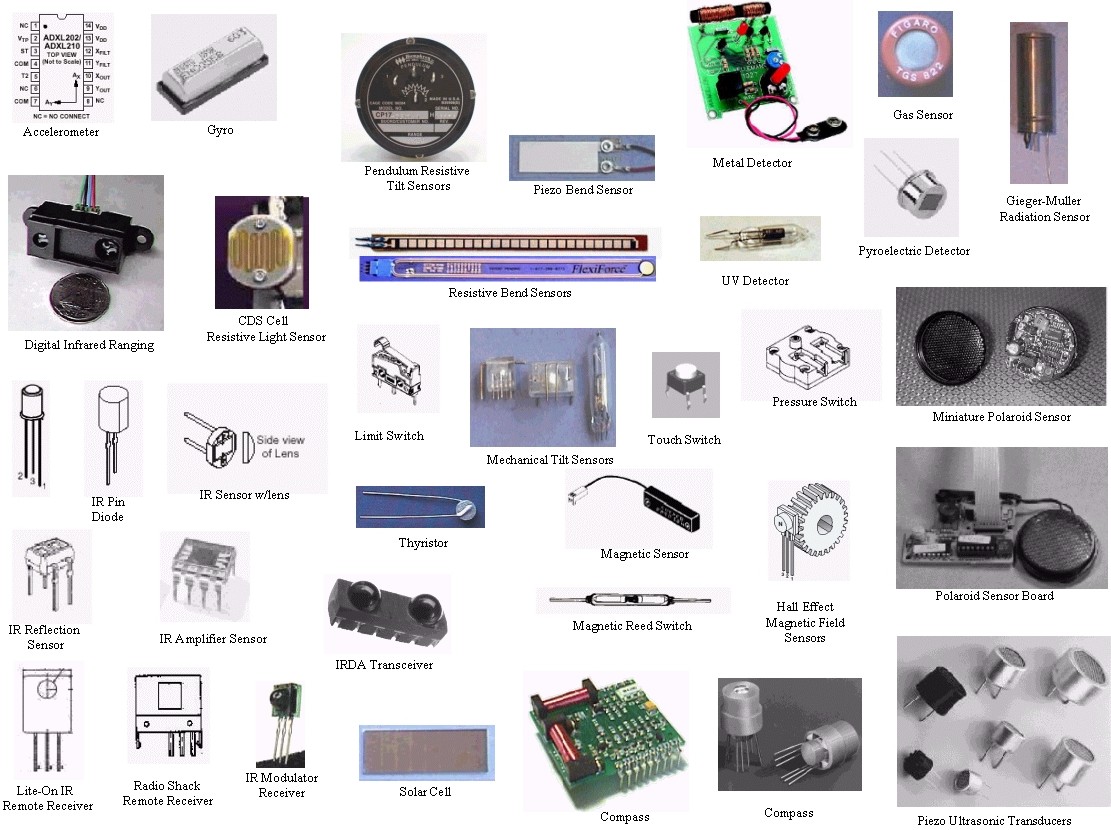
Liste des figures Figure 1.1 : L'horloge de Ctésibios ( http://ichbiah.online.fr/extraits/robots/histoire-des-robots.htm). Figure 1.2 : L'automate d'Al Jazari (Cours de robotique fondamental) ( http://ichbiah.online.fr/extraits/robots/histoire-des-robots.htm). Figure 1.3 : Le canard développé par Jacques de Vaucanson ( http://ichbiah.online.fr/extraits/robots/histoire-des-robots.htm). Figure 1.4 : Machine à tisser ( http://ichbiah.online.fr/extraits/robots/histoire-des-robots.htm). Figure 1.5 : Le premier ordinateur. ( http://ichbiah.online.fr/extraits/robots/histoire-des-robots.htm) Figure 1.6 : Les différents types des robots (Introduction à la robotique) ( http://ligmembres.imag.fr/aycard/html/Enseignement/intro-robotique.pdf) Figure 1.7 : Un bras manipulateur ( http://michel.llibre.pagesperso-orange.fr/) Figure 1.8 : Effecteur finale d'un manipulateur ( http://www.snipview.com/q/Robot end effector) Figure1.9 : Différents actionneurs d'un robot ( http://www.robotshop.com/blog/en/files/actuators.jpg) Figure 1.10 : Différents capteurs d'un robot ( http://www.societyofrobots.com/images/sensors_reference.jpg) Figure 1.11 : Un contrôleur utiliser pur commander un robot ( http://arduino.cc/en/Main/arduinoBoardMega) Figure1.12 : Le logiciel qui commande le robot ( http://www.societyofrobots.com/step_by_step_robot_step1.shtml) Figure 1.13 : L'espace de travaille de robot cylindrique (Computer Aided Manufacturing) Figure 1. 14: L'espace de travaille de robot rectiligne (Computer Aided Manufacturing) Figure 1.15 : L'espace de travaille de robot sphérique (Computer Aided Manufacturing) Figure 1.16 : L'espace de travaille de robot articulé (Computer Aided Manufacturing) Figure 1.17 : L'espace de travaille de robot SCARA ( http://www.societyofrobots.com/robot_arm_tutorial.shtml) Figure 1.18 : L'architecture d'un robot mobile (SLIMANE Noureddine, "SYSTEME DE LOCALISATION POUR ROBOTS MOBILES" Mémoire pour l'obtention du grade de docteur d'état en robotique. Université de Batna) II Figure1.19 : Robot de type unicycle (Belkhadria Khemisti, "commande d'un robot mobile par réseaux de neurones artificiels" Mémoire en vue de l'obtention du diplôme de magister en électronique. Option : Robotique. Université El Hadj Lakhdar Batna) Figure1.20 : Robot de type tricycle (Belkhadria Khemisti, "commande d'un robot mobile par réseaux de neurones artificiels" Mémoire en vue de l'obtention du diplôme de magister en électronique. Option : Robotique. Université El Hadj Lakhdar Batna) Figure1.21 : Robot de type voiture (Belkhadria Khemisti, "commande d'un robot mobile par réseaux de neurones artificiels" Mémoire en vue de l'obtention du diplôme de magister en électronique. Option : Robotique. Université El Hadj Lakhdar Batna) Figure1.22 : Robot de type omnidirectionnel (Belkhadria Khemisti, "commande d'un robot mobile par réseaux de neurones artificiels" Mémoire en vue de l'obtention du diplôme de magister en électronique. Option : Robotique. Université El Hadj Lakhdar Batna) Figure 1.23 : Robot chirurgical Da Vinci ( http://www.chirurgie-robotisee.ch/) Figure 1.24 : Le robot infirmier RIBA ( http://www.engadget.com/2011/08/02/riba-ii-healthcare-robot-now-stronger-smarter-still-a-bear/) Figure 1.25 : Le robot patient Hanako Showa ( http://www.scriptol.fr/robotique/robots/medical.php) Figure 2.1 : Les différents étages d'un system automatisé (Sensors and Actuators: Control System Instrumentation) Figure 2.2 : Chaine d'action d'un capteur Figure 2.3 : Schéma d'un capteur composite (Les capteurs en instrumentation industrielle (par Georges Asch)) Figure 2.4 : Quelque effet physique d'un capteur actif : a) thermoélectrique, b) pyroélectrique, c) piézoélectrique, d) indiction électromagnétique, e) photoélectricité, f) effet Hall (Les capteurs en instrumentation industrielle (par Georges Asch)) Figure 2.5 : Les trois domaines de fonctionnement d'un capteur (Chapitre_01_668_H14) Figure 2.6 : La sensibilité d'un capteur (Sensor Technologies: Healthcare, Wellness and Environmental Applications (Par Michael J. McGrath,Cliodhna Ni Scanaill)) Figure 2.7: hystérésis d'un capteur (Resistive, Capacitive, Inductive, and Magnetic Sensor Technologies (Par Winncy Y. Du)) Figure 2.8 temps de réponse d'un capteur Figure 2.9 temps de récupération Figure 2.10 : L'erreur du zéro (Chapitre_01_668_H14) Figure 2.11 : L'erreur liée à l'étalonnage (Chapitre_01_668_H14) Figure 2.12 Schéma fonctionnel et symboles des actionneurs III Figure 2.13 Principe de la commande de vitesse en boucle fermée Figure 2.14 : Actionneur hydraulique ( http://www.coastersworld.fr/index.php?page=reportage_safetybar) Figure 2.15 : Actionneur piézoélectrique ( https://www.elprocus.com/piezoelectric-ultrasonic-motor-technology/) Figure 2.16 : Vue en couple simplifiée ( http://stigen.branly.amiens.free.fr/fiches%20elec/moteur.pdf) Figure 2.17 : Perspective de l'induit simplifiée ( http://stigen.branly.amiens.free.fr/fiches%20elec/moteur.pdf) Figure 2.18 : Règle de la main droite ( http://physique.vije.net/1STI/electricite_m.php?page=force_magnetique2) Figure 2.19 : Les couples d'un moteur ( http://stigen.branly.amiens.free.fr/fiches%20elec/moteur.pdf) Figure 2.20 : Bilan de puissance ( http://www4.ac-nancy-metz.fr/lyc-loritz-nancy/pre bac/ssi/cours/electrotechnique/MoteursDC/equations.htm) Figure 2.21 : a)Symbole d'un moteur à excitation indépendant ; b) à excitation shunt Figure 2.22 : Symbole d'un moteur à excitation série ( http://christophe.bleja.free.fr/cours/ch6/moteurserie-I.htm) Figure 2.23 : Symbole d'un moteur à excitation compound Figure 2.24 : Structure de moteur à balais et moteur sans balais (file:///C:/Users/Hocine/Downloads/la_machine_synchrone_monophasee_et_biphasee_dans_les_aut omatismes j.f hilaire%20(1).pdf) Figure 2.25 : Un servomoteur ( http://www.mysti2d.net/polynesie//SIN/08/ServoLent/ServoLent.html?Servomoteur.html) Figure 2.26 : Moteur à aimants permanant ( http://www.mdpmotor.fr/documentation/lexique/pas-a-pas/composition.html) Figure 2.27 : Moteur hybride ( http://www.mdpmotor.fr/documentation/lexique/pas-a-pas/composition.html) Figure 2.28 : Moteur à réluctance variable ( http://www.mdpmotor.fr/documentation/lexique/pas-a-pas/composition.html) Figure 3.1 : Schéma des éléments principaux d'un microcontrôleur (Microcontrollers: Fundamentals and Applications with PIC (Par Fernando E. Valdes-Perez,Ramon Pallas-Areny)) Figure 3.2 : Symbole d'un convertisseur numérique/analogique ( http://www.physagreg.fr/capes-physique-montage-8-conversion-analogique-numerique.php) IV Figure 3.3 : Signal analogique par la technique PWM ([35]) Figure 3.4 : Les types des microcontrôleurs ([31]) Figure 3.5 : L'architecture d'un microcontrôleur (Microcontroller (Par V. Udayashankara)) Figure 3.6 : Les appareils de communication Figure 3.7 : Appareil médicale ( http://buzz-esante.com/2015/01/06/freestylelibre-patch-connecte-pour-la-mesure-de-la-glycemie/) Figure 3.8 : Appareil de sécurité ( http://www.climatisation-alarme-var.fr/alarmes-surveillance-vidauban). Figure 3.9 : Les appareils industriels ( http://www.cogniscotech.com/default.aspx) Figure 3.10 : Les moyens de transports ( http://blogvoyages.fr/se-deplacer-en-france/) Figure 3.11: TV, video, HIFI ( http://www.speedpcservices.net/produits.html) Figure 3.12 : Enregistreur de données géographiques à pile et système de fixation ( http://hitech.bfh.ch/fr/archives/hitech_32009/geolocalisateur.html) Figure 3.13 : Déférent types des capteurs pour l'arduino ( http://www.trossenrobotics.com/c/arduino-sensors.aspx) Figure 3.14 : Déférents actionneurs pour l'arduino ( http://technopengl.free.fr/index.php?page=Actionneurs) Figure 3.15 : Déférent types des cartes arduino ( https://www.sparkfun.com/categories/103?page=all) Figure 3.16 : Interface de logiciel arduino ( http://www.louisreynier.com/fichiers/KesacoArduino.pdf) Figure 3.17: Détail de barre de bouton ( http://www.louisreynier.com/fichiers/KesacoArduino.pdf) Figure 4.1 : La structure générale du robot Figure 4.2 : Le placement des capteurs infrarouge dans le robot Figure 4.3 : Schéma du capteur infrarouge Figure 4.4 : L'opération d'étalonnage Figure 4.5 : La valeur maximale en fonction de distance Figure 4.6 : L'opération d'étalonnage angulaire Figure 4.7 : La valeur maximale en fonction de l'angle Figure 4.8 : L'effet de la fente sur le capteur V Figure 4.9 : La valeur de capteur de précision en fonction de distance Figure 4.10 : La valeur de précision en fonction de l'angle Figure 4.11 : Courbe d'étalonnage de thermistance Figure 4.12 : Schéma de capteur de température Figure 4.13 : Capteur ultrason HC-SR04 Figure 4.14 : L'opération d'étalonnage de capteur de distance Figure 4.15 : Étalonnage de capteur de distance HC-SR04 Figure 4.16 : La carte Arduino Mega Figure 4.17 : Le moteur DC utilisé Figure 4.18 : Schéma de circuit de commande du moteur Figure 4.19 : L'opération d'étalonnage de circuit de commande Figure 4.20 : L'étalonnage de circuit de commande Figure 4.21 : Schéma de circuit de commande de la pompe Figure 4.22 : Schéma de circuit d'alimentation Figure 4.23 : Solid Edge Figure 4.24 : La forme sous du robot Figure 4.25 : Les cotés principales du robot Figure 4.26 : Le châssis du robot sous Solid Edge Figure 4.27 : Le châssis du robot réalisé Figure 4.28 : Le cadre du robot sous Solid Edge Figure 4.29 : Le cadre de robot réalisé Figure 4.30 Mauvaise fonctionnement du robot Figure 4.31 Les anciens circuits de commande Figure 4.32 L'ancien cadre Figure 4.33 Bonne fonctionnement du robot Figure 4.34 : L'icone de l'application QuickRemote Figure 4.35 : La télécommande crée Figure 4.36 : L'opération de teste Liste des tableaux VI Liste des tableaux Tableau 1.1 Les avantages et des inconvénients des différents types de robots à roues Tableau 2.1 : quelque domaine d'utilisation des capteurs et des actionneurs Tableau 2.2 : L'influence des mesurande sur les propriétés électriques de matériaux. Tableau 2.3 : comparaison des différents types de moteurs pas à pas Tableau 3.1 : Les développements historiques dans les produits de microprocesseurs Tableau 4.1 : L'étalonnage de distance des capteurs infrarouge Tableau 4.2 : L'étalonnage angulaire des capteurs infrarouge Tableau 4.3 : L'étalonnage de distance du capteur de précision Tableau 4.4 : L'étalonnage angulaire du capteur de précision Tableau 4.5 : Tableau d'étalonnage de capteur de distance Tableau 4.6 : Etalonnage de circuit de commande Tableau 4.7 : Les circuits de robot Tableau 4.8 : Les pièces du robot |
|



){kind=link}
){kind=link}