Chapitre 1 :
Généralité sur les
robots
1. 2
Introduction
Les robots aujourd'hui ont un impact considérable sur
de nombreux aspects de la vie moderne, de la fabrication industrielle aux soins
de santé, le transport et l'exploration de l'espace et le profond de la
mer. Demain, des robots seront aussi omniprésents et personnelle comme
les ordinateurs personnels.
Le rêve de créer des machines qui sont
qualifiés et intelligentes a fait partie de l'humanité depuis le
début du temps. Ce rêve est en train de devenir une partie de la
réalité de notre monde. [4]
Quand les chercheurs ont commencé à
réfléchir sur la conception de robots, on appelait «
robotique » la science des robots et/ou l'art de concevoir et fabriquer
des robots. Les succès des robots industriels, qui travaillaient
initialement en poste isolé et qui ont été
intégrés à des chaînes de production comme des
machines parmi d'autres, ont conduit le public à élargir le sens
du terme « robotique » et à le rendre désormais presque
synonyme d'automatisation. Le correspondant de robotique devrait naturellement
être « automatique » mais ce n'est pas le cas dans le langage
courant. Pour compenser ce hiatus se sont créés le mot «
robotisation » et le verbe « robotiser » pour désigner la
plupart des automatisations et leur mise en oeuvre, même en l'absence de
véritables robots. Dans certains champs d'applications, des mots
calqués sur robotique sont apparus. Il en est ainsi de « domotique
» qui désigne tout ce qui concerne l'automatisation dans l'habitat
ou « productique » pour tout ce qui a trait aux moyens de production.
[1]
Aujourd'hui, la robotique est donc l'art d'automatiser des
systèmes plus ou moins complexes mais en s'appuyant sur le savoir-faire
acquis par les études sur la conception de robots, savoir-faire issu des
développements d'une branche de l'automatique générale.
[2]
En effet, on constate a posteriori que la structure d'une
machine ou d'un système n'a pas besoin d'adopter la forme physique de ce
qu'on appelle généralement robot pour que son contrôle
adopte les mêmes composants que ces machines, à savoir : des
capteurs internes pour la régulation, des capteurs externes pour
connaître l'environnement, des moyens d'action motorisés, ainsi
qu'une informatique de commande pouvant faire appel à la programmation
et aux techniques de l'intelligence artificielle. Tous ces composants et leurs
actions peuvent être distribués dans l'espace au lieu d'être
rassemblés ou de provenir d'une seule structure. Par ailleurs, une
collaboration de divers ensembles est possible aboutissant donc à un
système robotisé.
2. Historique de l'évolution de la robotique et
les robots
Durant plusieurs millénaires, les automates ont
reposé sur des ressorts, engrenages et autres mécanismes, ce qui
ne les a pas empêchés d'atteindre une grâce qui force
l'admiration. Et puis l'informatique est venue changer la donne en permettant
de stocker de très larges quantités d'informations et de
séquences d'actions dans une petite puce. Le robot est ainsi
arrivé à une sophistication telle qu'il peut désormais
tenter de trouver par lui-même la solution de certains problèmes.
[3]
L'histoire des robots a ainsi traversé les étapes
suivantes : Les masques et statues animés de
l'antiquité
3
L'origine des masques et statues animés remonte
à l'Egypte ancienne où l'on a recensé un masque à
l'effigie de Thot (tête d'Ibis) ou d'Horus (tête de faucon) qui
pareillement semblent doués de mouvement. Ce qui caractérise ces
divers artefacts, c'est que l'automatisme y est caché, mis à
profit par des castes religieuses pour assurer leur pouvoir sur le peuple comme
sur les souverains. [3]
L'horloge
C'est en 246 avant J.C. que nous trouvons la trace du premier
inventeur d'envergure, un dénommé Ctésibios qui habite la
ville d'Alexandrie. Ctésibios est parvenu à créer une
horloge si précise que son cadran fait exactement un tour par
année solaire ! Pour la première fois, il existe une parfaite
concordance entre un instrument de mesure humain et un phénomène
issu du monde physique extérieur. [3]

Figure 1.1 L'horloge de Ctésibios
Des automates de l'orient aux jacquemarts
européens
Les arabes sont les premiers à mettre en pratique
à une grande échelle les techniques décrites par le
mathématicien et mécanicien grec Héron d'Alexandrie (et
aussi par Phylon de Byzance). Dès 809, Charlemagne reçoit de la
part du sultan Haroun Al Rachid un automate mécanique. [3]
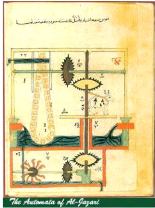
Puis, lors des huit expéditions en Orient menées
à l'occasion des Croisades - de 1096 à 1291 - les
européens découvrent de visu l'étonnant raffinement des
horloges à eau réalisées par Al Jazari pour le compte de
ce même Haroun Al Rachid.
Pour obtenir un écoulement constant de l'eau, Al Jazari
a développé un système d'une rare
ingéniosité, inspiré d'un système inventé
par Archimède. La plus grande de ses horloges mesure 3,3 mètres
de hauteur et 1,35 mètre de largeur. [3]
4
Figure 1.2 L'automate d'Al Jazari
Vers l'âge d'or des automates
Le 18ème siècle apparaît comme l'âge
d'or des automates. L'un des grands inventeurs d'engins mécaniques de
l'époque est le protégé du roi Louis XV, Jacques de
Vaucanson (1709 - 1792). Il développe un " canard mécanique " qui
force l'admiration. Celui ci " allonge le cou pour aller prendre le grain dans
la main, l'avale, le digère " Après avoir transformé
l'aliment en bouillie, il le rejette par les voies ordinaires, pleinement
digéré. Les créations que réalise Vaucanson tel le
joueur de flûte qui exécute onze airs différents et aussi
celle de ses disciples séduisent l'Europe entière et s'exportent
aux Etats-Unis. [3]

Figure 1.3 Le canard développé par Jacques de
Vaucanson La première machine programmable
La mode veut que l'on s'habille à la chinoise, avec des
tenues de soie bardées de motifs complexes. Pour les tisserands
lyonnais, la réalisation de telles étoffes représente un
casse-tête de taille.
Basile Bouchon se penche sur le problème, et il a
réussi de développé une machine à tisser dont son
mécanisme utilise une bande de papier perforé pour
contrôler le passage des aiguilles dans le tissu. Ce
procédé mis au point en 1729 est automatisé par Vaucanson
en 1745.
Le tisserand Joseph-Marie Jacquard a ensuite l'idée de
séparer les cartes perforées portant le modèle à
réaliser, de la machine elle-même.
5
Produit en milliers d'exemplaires, le métier à
tisser Jacquard qu'il inaugure en 1801 devient la première machine
automatisant le traitement de l'information et opérant une distinction
entre la machine et le programme qu'elle utilise. Il ouvre ainsi la voie aux
ordinateurs et robots capables d'opérer par eux-mêmes. [3]

Figure 1.4 Machine à tisser
L'ordinateur, potentielle intelligence du robot
?
Niels Bohr a décrit dans ses travaux publiés
vers 1913 que l'électron peut déplacer d'un atome à
l'autre une vitesse vertigineuse. D'où l'idée de créer des
circuits exploitant cette incroyable mobilité. En 1937, Turing
énonce les principes d'une machine qui calculerait à la vitesse
de l'électronique, et serait donc capable de traiter d'énormes
volumes d'informations codées sous la forme booléenne (0 et
1).L'arrivée des ordinateurs est appelée à jouer un
rôle majeur dans l'élaboration des machines intelligentes que sont
les robots.
Sous l'impulsion de Turing, un premier ordinateur
apparaît en 1943. Sa puissance de calcul est mise à contribution
dans la guerre et joue un rôle décisif en facilitant le
décryptage du code Enigma mis au point par les nazis pour leurs
échanges de messages. [3]

Figure 1.5 Le premier ordinateur
Le premier bras
télé-opéré
C'est en Lorraine en 1954, à Argonne qu'un chercheur du
nom de Raymond Goertz a l'idée de rationaliser les bras de
télé-opération en assujettissant leurs articulations
à des moteurs électriques. Grâce à un tel
système, l'opérateur peut désormais se trouver à
plusieurs centaines de mètres du lieu
6
où il manipule des éléments dangereux :
les commandes qu'il transmet à la pince sont transmises par les fils
électriques. [3]
3. Définition
Écrivain tchèque, Karel Capek, dans son drame,
introduit le mot robot au monde en 1921. Il est dérivé du mot
tchèque robota qui signifie "travailleur forcé". Isaac Asimov
l'écrivain russe de la science-fiction, a inventé le mot
robotique dans son histoire "Habillage", publié en 1942, pour
désigner la science consacrée à l'étude des robots.
[5]
Avant définir qu'est ce qu'un robot nous citerons les
trois lois qui ont été développés par Isaac Asimov,
et qui sont régissant le comportement d'un robot
Les trois lois de la robotique
? Un robot ne peut blesser un humain ni, par son inaction,
permettre qu'un humain soit blessé. ? Un robot doit obéir aux
ordres donnés par les humains, sauf si de tels ordres se trouvent en
contradiction avec la première loi.
? Un robot doit protéger sa propre existence aussi
longtemps qu'une telle protection n'est pas en contradiction ni avec la
première et/ou ni avec la deuxième loi. [6]
Le robot
C'est une machine pouvant manipuler des objets en
réalisant des mouvements variés dictés par un programme
aisément modifiable.
Programmer un robot consiste, dans ut premier temps, à
lui spécifier la séquence des mouvements qu'il devra
réaliser.
Certains robots sont dotés de "sens" ;
c'est-à-dire d'un ensemble plus ou moins important d'instruments de
mesure et d'appréciation caméra, thermomètre,
télémètre, ...) permettant au programme du robot de
décider du mouvement le mieux adapté aux conditions
extérieures. Par exemple: si un robot mobile muni d'une caméra ut
amené à se déplacer dans un local inconnu, on peut le
programmer pour qu'il contourne tout obstacle qui entraverait sa route.
On essaie également de doter des robots d'un dispositif
d'intelligence artificielle afin qu'ils puissent faire face a des situations
imprévues et nouvelles (le robot pourrait acquérir une certaine
"expérience").

Figure 1.6 Les différents types des robots
7
4. Les composants de Robots
Un robot, en tant que système, se compose des
éléments, qui sont intégrés ensemble pour former un
ensemble. La plus par des robots contient les éléments
suivants:
4.1. Manipulateur: c'est le corps principal du
robot qui comprend les jonctions, les articulations, et d'autres
éléments de structure du robot. Il convient de noter ici que le
manipulateur seul n'est pas un robot. [11]

Figure 1.7 Un bras manipulateur
4.2. Effecteur finale: cette partie est
reliée à la dernière jonction (main) d'un manipulateur qui
gère généralement les objets, établit des
connexions à d'autres machines ou effectue les tâches requises.
[11]
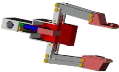
Figure 1.8 Effecteur finale d'un manipulateur
4.3. Actionneurs: les actionneurs sont les
«muscles» de manipulateurs. Le contrôleur envoie des signaux
aux actionneurs, qui, à son tour, déplacent les articulations du
robot et des jonctions, les types communs des actionneurs sont les
servomoteurs, les moteurs pas à pas, les actionneurs pneumatiques et les
vérins hydrauliques. Les actionneurs sont sous le contrôle du
contrôleur. [11]

Figure1.9 Différents actionneurs d'un robot
4.4. Capteurs: les capteurs sont
utilisés pour recueillir des informations sur l'état interne du
robot ou pour communiquer avec l'environnement extérieur. Comme chez
l'humain, le dispositif de commande de robot doit connaître l'emplacement
de chaque lien du robot afin de connaître la configuration du robot.
Toujours comme vos principaux sens de la vue, le toucher, l'ouïe, le
goût, et
8
la parole, les robots sont équipés de
dispositifs sensoriels externes comme un système de vision, le toucher
et les capteurs tactiles, synthétiseur de parole, et grâce
à eux le robot peut communiquer avec le monde extérieur. [11]

Figure 1.10 Différents capteurs d'un robot
4.5. Contrôleur: le contrôleur
est plutôt proche de votre cervelet; même si elle n'a pas la
puissance du cerveau; il contrôle toujours vos mouvements. Le
contrôleur reçoit les données de l'ordinateur (le cerveau
du système), commande les mouvements des actionneurs, et coordonne les
mouvements avec les informations envoyées par les capteurs.
4.6. Processeur: le processeur est le cerveau
du robot. Il calcule les mouvements des articulations du robot,
détermine combien et à quelle vitesse chaque joint doit se
déplacer pour atteindre l'emplacement et la vitesse souhaitée, et
supervise les actions coordonnées du contrôleur et les capteurs.
Dans certains systèmes, le contrôleur et le processeur sont
intégrés ensemble en une seule unité, et dans d'autres
cas, ce sont des unités séparées. [11]
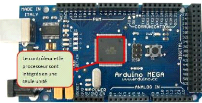
Figure 1.11 Un contrôleur utiliser pur commander un
robot
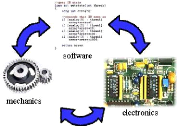
4.7. Logiciel: trois groupes de logiciels
sont utilisés dans un robot. L'un est le système d'exploitation
qui exploite le processeur. Le second est le logiciel robotique qui calcule la
motion nécessaire de chaque joint du robot basée sur des
équations cinématiques. Ces informations sont envoyées au
dispositif de commande. Ce logiciel peut être à différents
niveaux, de la langue de la machine aux langues sophistiqués
utilisés par les robots modernes. Les troisième groupes est la
collection d'application - orientée les routines et les programmes
développés pour utiliser le robot ou ses
périphériques pour des tâches spécifiques telles que
l'assemblage, le chargement de machines, la manutention et les routines de
vision. [11]
9
Figure1.12 Le logiciel qui commande le robot
5. Les types des robots
Il existe deux grandes familles de robots sont :
· Les robots manipulateurs.
· Les robots mobiles.
5.1. Les robots manipulateurs
Un robot manipulateur est en forme d'un bras et se composent
d'un certain nombre de segments qui est conçu pour manipuler ou
déplacer des matériaux, outils et pièces sans contact
humain direct. Ils sont des dispositifs qui permettent aux humains d'interagir
avec des objets dans un environnement en toute sécurité. Les
robots manipulateurs sont utilisés dans des applications industrielles
pour s'effectuer efficacement des tâches telles que l'assemblage,
soudage, traitement de surface, et le forage.
Les types des robots manipulateurs
Les robots manipulateurs viennent sous plusieurs formes. Les
formes se répartissent en en cinq grandes catégories :
· Robots cylindriques
· Robots rectilignes
· Robots sphériques
· Robots articulés
· Robots SCARA
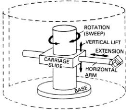
a) Robots cylindriques
Le robot cylindrique a deux axes de mouvement, un pour le
mouvement en haut et bas. La rotation se fait par la jonction à la base.
De plus, le bras horizontal peut se déplacer à l'intérieur
et à l'extérieur, ce qui donne un troisième axe de
mouvement limitée. [9]
10
Figure 1.13 L'espace de travaille de robot cylindrique
b) Robots rectilignes
Les robots rectilignes a trois axes de mouvement (x, y, z).
Pour cette raison, le robot rectiligne est parfois appelé Robot
cartésien. Ces robots sont exploités par vérin
pneumatique. [9]
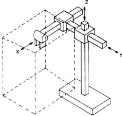
Figure 1.14 L'espace de travaille de robot rectiligne
c) Robots sphériques
Le robot sphérique est de grande taille avec un bras
télescopique qui assure un mouvement à l'intérieur ou
à l'extérieur. Les mouvements de base du robot sphérique
sont de rotation (à la base) et angulairement en haut ou en bas (sur le
bras). [9]
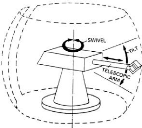
Figure 1.15 L'espace de travaille de robot sphérique
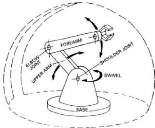
d) Robots articulés
Le bras articulé du robot ressemble à un bras
humain. Il se compose de deux éléments, nommés
l'avant-bras et le bras supérieur. Ce type de robot n'a
généralement pas besoin d'un lieu séparé. [10]
11
Figure 1.16 L'espace de travaille de robot articulé
e) Robots SCARA
Un robot SCARA est défini dans la norme ISO 8373: 1994,
No.3.15.6, en tant que «robot comporte deux liaisons pivots
parallèles pour fournir conformément à un plan
sélectionné».et peut être considérée
comme un cas particulier d'un robot cylindrique. Le terme «SCARA»
signifie «Selective Compliance Arm for Robot Assembly». (Autre
interprétation comprennent «Selective Compliance Articulated for
Robot Assembly».). [8]
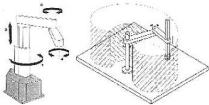
Figure 1.17 L'espace de travaille de robot SCARA
| 

