Chapitre 2 :
Capteurs et Actionneurs
18
1. Introduction
Ce chapitre discute sur les composants du robot. Se n'est pas
tout les composants qui sont mentionnés dans le chapitre
précédent, mais plus précisément, le chapitre
traite les capteurs, actionneurs, et d'autre concepts sur ces deux termes.
Le système de commande est un système dynamique
qui contient un dispositif de commande en tant que partie intégrante. Le
but du contrôleur est de générer des signaux de commande,
qui conduira le processus pour être contrôlé. Les
actionneurs sont nécessaires pour effectuer les actions de
contrôle, les capteurs et transducteurs aussi sont nécessaires
pour mesurer les signaux de sortie (réponses de processus) et de mesurer
les signaux d'entrée pour la commande anticipatrice, et pour diverses
autres fins). Parmi les différents types et les niveaux de signaux sont
présents dans un système de contrôle, la modification du
signale (y compris le conditionnement du signal et la conversion du signal) est
en effet joue un rôle crucial à tout système de
contrôle. En particulier, la modification du signal est une
considération importante dans l'interfaçage des composants. Il
est clair que le sujet du système de contrôle doit contenir des
capteurs, des transducteurs, actionneurs, modification du signal, et
l'interconnexion des composants. En particulier, le sujet de l'identification
des composants du système de commande doit respecter les fonctions, le
fonctionnement et l'interaction, la bonne sélection et
l'interfaçage de ces composants pour diverses applications de
contrôle. La sélection des paramètres (y compris les
réglages du système) aussi est une étape importante. La
conception est une partie nécessaire de l'instrumentation du
système de contrôle, car c'est elle qui nous permet de construire
un système de contrôle qui répond aux exigences de
performance "on commence, peut-être, avec des composants de base tels que
les capteurs, les actionneurs, les contrôleurs, les compensateurs, et
appareils de modification de signal."
Les ingénieurs de contrôle devraient être
en mesure d'identifier ou de sélectionner des composants, en particulier
les capteurs et actionneurs, pour un système de contrôle, le
modéliser et analyser les différents composants et les
systèmes globaux, et de choisir les valeurs des paramètres afin
que le système peut effectuer certaines fonctions en conformité
avec les spécifications.
L'identification, l'analyse, la sélection
correspondante et l'interfaçage des composants, et le réglage du
système intégré (cet est à dire, le réglage
des paramètres pour obtenir la réponse requise du système)
sont des tâches essentielles dans l'instrumentation et la conception du
système de contrôle. [13]
Les capteurs et les actionneurs utilisés dans certain
domaine sont indiqués dans le tableau suivant: [13]
Tableau 2.1 quelque domaine d'utilisation des capteurs et des
actionneurs
|
processus
|
Les capteurs utilisés
|
Les actionneurs utilisés
|
|
Avion
|
déplacement, vitesse, accélération,
l'altitude, la position, force, pression,
température, débit de fluide, la
tension, le
courant, le système de positionnement mondial (GPS)
|
Moteurs à courant continu,
moteurs pas à pas, relais,
actionneurs de vannes,
pompes, sources de chaleur, les moteurs à
réaction
|
|
Automobile
|
déplacement, vitesse, force, pression,
température, débit de fluide, niveau de liquide, la tension, le
courant
|
Moteurs à courant continu, moteurs pas à pas, les
relais,
actionneurs de vannes, les
|
19
|
|
pompes, les sources de
chaleur
|
|
Système de chauffage domestique
|
pression, température, débit de fluide
|
Moteurs, pompes, sources de chaleur
|
|
Fraiseuse
|
déplacement, vitesse, force, pression,
température, la tension, le courant, l'acoustique
|
Moteurs à courant continu, moteurs à courant
alternatif
|
|
Robot
|
image optique, déplacement, vitesse, force, la tension,
le courant, couple motrice
|
Moteurs à courant continu, moteurs à courant
alternatif, des actionneurs hydrauliques, des servomoteurs
|
|
Four de séchage du bois
|
La température, l'humidité relative, taux
d'humidité et le débit d'air
|
Moteurs à courant continu, moteurs à courant
alternatif, pompes, sources de chaleur
|
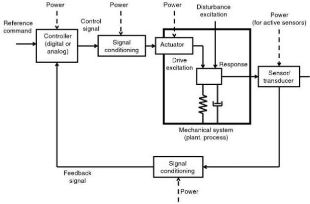
Figure 2.1 Les différents étages d'un system
automatisé
|
|


