IV 6.PSS basés sur la logique floue :
Le stabilisateur de système de puissance est
utilisé pour améliorer le rendement du générateur
synchrone. Cependant, il en résulte dans la mauvaise performance dans
diverses conditions de chargement qui a mis en oeuvre avec PSS
classiques. A cet effet, le besoin de logique floue PSS se pose.
Le contrôleur flou utilisé dans stabilisateur système
électro-énergétique est normalement une deux
entrées et une composante de sortie unique. C'est
généralement un système MISO. Les deux
entrées sont changement de vitesse angulaire et le taux de variation de
la vitesse angulaire tandis que la sortie du contrôleur logique floue est
un signal de tension. Une modification de la tension de la rétroaction
au système d'excitation en fonction de la puissance
accélération sur une unité est utilisée pour
améliorer la stabilité du système. Les signaux de
stabilisation sont calculés en utilisant les fonctions d'appartenance
floue standard en fonction de ces variables[27].
IV.6.1. Sélection de variables d'entrée et de
sortie :
On fait définir les variables d'entrée et de
contrôle, c'est-à-dire, déterminer quels états du
processus doivent être observées et doivent être
considérées comme des mesures de contrôle. Pour les
modèles FLPSS, l'accélération et la
déviation de vitesse du générateur peuvent être
observés et ont été choisis comme le signal
d'entrée du PSS floue. Les performances dynamiques du
système pourraient être évaluées par l'examen de la
courbe de réponse de ces deux variables. La tension est à la
sortie du contrôleur logique floue[27].
Pratiquement, la vitesse d'axe seulement est facilement
disponible. Le signal d'accélération peut être
dérivé des signaux de vitesses mesurées à deux
instants successifs d'échantillonnage à l'aide d'équation
au-dessous :
? ? ? ? ? ? ? ?
? ? k ? ? ? k ?
1
? ? k ?
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
IV.6.2.Fonction d'appartenance :
Les variables choisies pour ce contrôleur sont la
déviation de vitesse, d'accélération et de tension, en
cela, la déviation de la vitesse et l'accélération sont
les variables d'entrée et la tension est variable de sortie. Le nombre
de variables linguistiques décrivant les sous-ensembles flous d'une
variable varie en fonction de la demande (l'application).
Généralement, un nombre impair est utilisé. Un nombre
raisonnable est sept. Toutefois, la multiplication des sous-ensembles flous
entraîne une augmentation correspondante du nombre de règles.
Chaque variable linguistique a sa fonction d'appartenance floue. La fonction
d'appartenance mappe les valeurs nettes dans des variables de floues. Les
fonctions d'appartenance triangulaires sont utilisées pour
définir le degré d'appartenance. Il est important de ne pas que
le degré d'adhésion joue son rôle important dans la
conception[27] .
Un contrôleur flou. Chacune des variables
d'entrée et de sortie de flous est affecté sept sous-ensembles
flous linguistiques variant de grand négatif (NB) à grand positif
(PB). Chaque sous-ensemble est associé à la fonction de
d'appartenance triangulaire à partir d'un ensemble de sept fonctions
d'appartenance pour chaque variable floue.
|
NB
|
NECATIVE BIG
|
|
NM
|
NECATIVE MEDIUM
|
|
NS
|
NECATIVE SMALL
|
|
ZE
|
ZERO
|
|
PS
|
POSITIVE SMALL
|
|
PM
|
POSITIVE MEDIUM
|
|
PB
|
POSITIVE BIG
|
Tableau IV.3. Variables floues
pour la fonction d'appartenance.
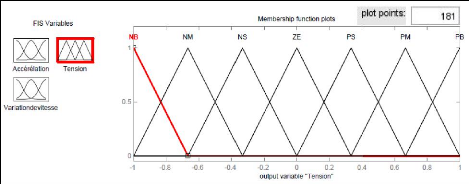
Les variables sont normalisées en multipliant avec des
gains respectifs de K1, K2,K3, afin que leur valeur comprise entre -1
et 1. Les fonctions d'appartenance des variables d'entrée et de sortie
ont 50% de chevauchement entre les sous-ensembles flous adjacents
[27]. La fonction d'appartenance pour
l'accélération, la vitesse et la tension sont indiquées
à la figure suivant :
99
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
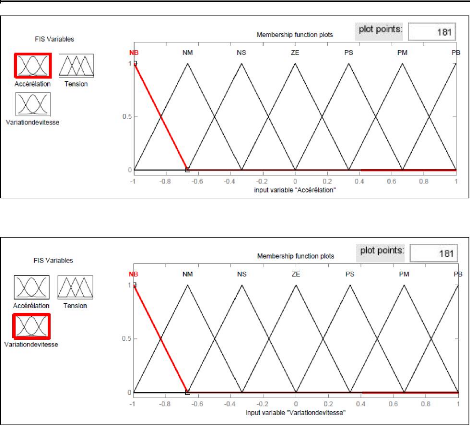
Figure VI.16. Fonctions
d'appartenance pour l'accélération.
Figure VI.17. Fonctions
d'appartenance pour la variation de vitesse.
100
Figure VI.18. Fonctions
d'appartenance pour la tension.
| 

