|
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
MINISTERE DE
L'ENSEIGNEMENT SUPERIEUR
ET DE LA RECHERCHE SCIENTIFIQUE
UNIVERSITE SAAD DAHLAB DE
BLIDA
Faculté de
Technologie
Département d'Aéronautique
MEMOIRE DE MAGISTER
Spécialité : Aéronautique
DETECTION ADAPTATIVE CFAR APPLIQUEE AU RADAR SECONDAIRE
DE
SURVEILLANCE (SSR) POUR L'ELIMINATION DU « FRUIT »
Par
Abdellah BOUIBA
Devant le jury composé de:
A. OULD ALT Professeur, EMP/B.Bahri President
M. HAMADOUCHE Maître de Conférences(A), U. de
Boumerdes Rapporteur
M. LAGHA Maître de Conférences(A), U. de Blida
Examinateur
H. BENCHOUBANE Maître de Conférences(A), U. de Blida
Examinateur
RESUME
Dans ce memoire nous etudions un des problèmes standard
du Radar de Surveillance Secondaire (SSR), afin d'ameliorer les performances de
detection des reponses mode A/C dans un environnement « FRUIT ». Nous
presenterons un schema final qui consiste en un processeur CFAR-BI
conventionnel à deux dimensions avec une detection simultanee de trois
impulsions references. Ce processeur est combine avec un estimateur des
paramètres du FRUIT, necessaire pour selectionner automatiquement le
facteur d'echelle approprie. Cette procedure garantit le contrôle de la
probabilite de fausse alarme constante dans un environnement FRUIT.
Les resultats obtenus montrent que le processeur propose
ameliore la detection du signal reponse dans un environnement FRUIT par rapport
au detecteur conventionnel.
ABSTRACT
In this work we study one of standard problems of Secondary
Surveillance Radar (SSR), to improve the detection performance of replies Mode
A/C in a "FRUIT". We will present a final scheme that consists of a
conventional BI-CFAR processor in two dimensions with a simultaneous detection
of three pulses references. This processor is combined with an estimator of the
parameters of FRUIT, necessary to automatically select the appropriate scale
factor. This procedure ensures the control of constant false alarm probability
in a FRUIT environment.
The results show that the proposed processor improves detection
of signal reply in a FRUIT environment compared to conventional detector.
|
????? ??????
|
?????? ,???????
|
???????
|
????
|
|
??? ?????
|
?? ????? ?????
|
?????
|
?????
|
X????
?? ???????? ??????? ??? ??????? ??? ?? ?????
?????? ??? ?? .??????? ??? ???? ???? ???? ?? ???? ??
???
.?????? ???? ?????? ??? ?? ?????? ????? ? ???? ????? ??? ????
ÁÇØÎ ????? ???
.??????? ??????
?????? ÁÇÞÊä? ??????? ,??????? ????? ??????
????? ???? ?? ?????? ???? ???????
." ??????? ??? ????" ???? ?? ????? ?????
?????? ?????? ???? ÁÇÑÌ?Ç ???
??? ????" ???? ?? ?????? ??? ???? ?????? ???????
??
|
???? ????? ??????
|
???????
|
|
|
.
|
???????? ?????? ??
|
???????
|
"???????
|
REMERCIEMENTS
Tout d'abord, je tiens à remercier Mr Hamadouche
M'hamed, mon directeur de projet pour m'avoir proposé un sujet de
recherche intéressants et pour m'avoir guidé tout au long de mon
projet.
Je tiens également à remercier chaleureusement
mon amis Benachenhou Kamal pour l'aide précieuse, la patience et le
temps qu'il ma consacré tout au long de ce travail.
Je remercie M. le Professeur Quld Ali Abdelaziz ainsi que M.
Lagha Mohand et M. Benchoubane Hacine qui ont acceptés de participer au
jury de ce mémoire
D'autre part, je n'oublie pas les camarades de l'année
théorique : Lazhar, Amine, Reda, Salim, et Hmed avec qui j'ai
passé une année très agréables.
Enfin, j'adresse mes plus sincères remerciements à
l'équipe pédagogique et administrative du département
d'aéronautique de l'université de Blida.
DEDICACES
Àla mémoire de Touhami
TABLE DES MATIERES
TABLE DES MATIERES 1
LISTE DES ILLUSTRATIONS, GRAPHIQUES ET TABLEAUX 5
|
CHAPITRE 1
1.1.
|
INTRODUCTION
10 : LES RADARS SECONDAIRES DE SURVEILLANCE... 12 INTRODUCTION
12
|
|
1.2.
|
Les modes classiques
|
|
15
|
|
1.2.1
|
Le signal d'interrogation
|
|
15
|
|
1.2.2.
|
Le signal réponse
|
|
..16
|
|
1.2.3.
|
Le transpondeur
|
|
18
|
|
1.2.4.
|
Principaux problèmes du SSR classiques (mode A/C)
|
|
18
|
|
1.2.5.
|
Systèmes d'éliminations des interrogations sur
|
les
|
lobes
|
|
secondaire
|
|
21
|
|
1.2.6.
|
Bilan de liaison
|
|
23
|
|
1.2.7.
|
Détection et décodage
|
|
27
|
|
1.3.
|
Le MONOPULSE (MSSR)
|
|
30
|
|
1.4.
|
Le mode sélectif (mode S)
|
|
33
|
|
1.4.1.
|
Les signaux d'interrogation
|
|
33
|
|
1.4.2.
|
Les réponses mode S
|
|
36
|
|
1.4.3.
|
Structure des données mode S
|
|
36
|
|
1.4.4.
|
Principales transactions mode S :
|
|
40
|
|
1.5.
|
CONCLUSION
|
|
41
|
|
CHAPITRE 2
|
: DETECTION CFAR
|
|
...42
|
|
2.1.
|
INTRODUCTION
|
|
42
|
|
2.2.
|
DETECTION A SEUIL FIXE
|
|
44
|
|
2.2.1.
|
Région de décision
|
|
44
|
|
2.2.2.
|
Critère de décision (NEYMAN-PEARSON)
|
|
46
|
|
2.3.
|
DETECTION ADAPTATIVE A TAUX DE
FAUSSE ALARME CONSTANT (CFAR)
|
47
|
|
2.4.
|
INTEGRATION BINAIRE
|
52
|
|
2.5.
|
LA SIMULATION « MONTE-CARLO »
|
55
|
|
2.6.
|
CONCLUSION
|
55
|
|
CHAPITRE 3
|
: DETECTION SSR/CFAR
|
56
|
|
3.1.
|
INTRODUCTION
|
56
|
|
3.2.
|
MODELISATION MATHEMATIQUE DES
|
|
|
SIGNAUX PARASITES
|
56
|
|
3.2.1.
|
Le signal a l'entré du détecteur quadratique (E).
|
57
|
|
3.2.2.
|
Evaluation de la probabilité d'apparition du FRUIT
|
58
|
|
3.2.3.
|
Le signal a la sortie du détecteur quadratique (x).
|
60
|
|
3.3.
|
DETECTION A SEUIL FIXE POUR UNE
|
|
|
SEULE RECURRENCE.
|
62
|
|
3.3.1.
|
Probabilité de détection.
|
62
|
|
3.3.2.
|
Probabilité de fausse alarme.
|
. 62
|
|
3.3.3.
|
Performance du détecteur à seuil fixe.
|
. 63
|
|
3.4.
|
DETECTION BINAIRE A SEUIL FIXE.
|
64
|
|
3.4.1.
|
Probabilité de détection binaire.
|
... 65
|
|
3.4.2.
|
Probabilité de fausse alarme binaire.
|
66
|
|
3.4.3.
|
Performance du détecteur binaire à seuil fixe.
|
66
|
|
3.5.
|
DETECTION CA-CFAR: (CELL AVERAGING CFAR)
|
..67
|
|
3.5.1.
|
Probabilité de détection.
|
67
|
|
3.5.2.
|
Probabilité de fausse alarme.
|
.69
|
|
3.5.3.
|
Estimation adaptative des paramètres du FRUIT (å0,
r)
|
69
|
|
3.5.3.1
|
L'algorithme de censure automatique.
|
70
|
|
3.5.3.2
|
Méthode proposé (censure directe).
|
71
|
3.5.3.2.1. Estimation de la probabilité d'apparition des
impulsions
FRUIT 73
3.5.3.2.2. Estimation du rapport FRUIT sur bruit (FNR). 74
3.5.3.2.3. Performance de la censure directe. 74
3.5.4. Performance du CA-CFAR. 77
3.6 DETECTION CA-CFAR-BI
(CELL AVERAGING - CFAR - BINARY INTEGRATION) 79
3.6.1 Probabilité de détection binaire. 80
3.6.2 Probabilité de fausse alarme binaire. 81
3.6.3 Performance du CA-CFAR-BI. 82
3.7. DETECTION CA-CFAR-BI-2D: (A DEUX DIMENSIONS) 84
3.7.1. Probabilité de détection du CA-CFAR-BI-2D.
85
3.7.2. Probabilité de fausse alarme du CA-CFAR-BI-2D.
85
3.7.3. Performance du CA-CFAR-BI-2D. 86
3.8. DETECTION CA-CFAR-BI-2D DE DEUX (2)
IMPULSIONS (F1 F2) SIMULTANEMENT ...88
3.8.1 Probabilité de détection du
CA-CFAR-BI-2D(F1F2). 89
3.8.2. Probabilité de fausse alarme du CA-CFAR-BI-2D
(F1F2). 90
3.8.3. Performance du CA-CFAR-BI-2D(F1F2). 91
3.9. DETECTION CA-CFAR-BI-2D DE TROIS (3)
IMPULSIONS SIMULTANEMENT 95
3.9.1 Probabilité de détection du CA-CFAR-BI-2D
(3I). 96
3.9.2. Probabilité de fausse alarme du CA-CFAR-BI-2D (3I).
97
3.9.3. Performance du CA-CFAR-BI-2D (3I). 98
3.10. CONCLUSION . 101
CHAPITRE 4 : ETUDE DE LA DETECTION (ADAPTATIVE) «
CA-CFAR-ABI-2D
(3I) » Par le procédée MONTE-CARLO 102
4.1. INTRODUCTION 102
4.2. ETUDE DES PERFORMANCES DU CA-CFAR- ABI-2D(3I)
4.3. RESULTATS ET DISCUSSIONS 104
CONCLUSION 109
LISTE DES ACRONYMES 111
LISTE DES SYMBOLES 113
REFERENCES BIBLIOGRAPHIQUES 115
LISTE DES ILLUSTRATIONS, GRAHPIQUES ET TABLEAUX
Figure 1.1 : Signal d'interrogation mode A/C 13
Figure 1.2 : Signal réponse mode A/C 13
Figure 1.3 : Synoptique de la chaine radar secondaire . 14
Figure 1.4 : L'arrangement de impulsions réponses . 16
Figure 1.5 : Réponse mode A (4321) 16
Figure 1.6 : Réponse mode C (altitude=5200ft) ...17
Figure 1.7: Illustration du garble 18
Figure 1.8 : Illustration du FRUIT 19
Figure 1.9 : Le multi trajet 20
Figure 1.10 : Les cibles fantômes 21
Figure 1.11: Diagramme de rayonnement du SSR et système
ISLS 22
Figure 1.12 : Niveau minimal de déclenchement (MTL, DMTL)
25
|
Figure 1.13 : Niveau minimal de déclenchement dynamique
(DMTL) pour les
réponses A/C 26
Figure 1.14 : Niveau minimal de déclenchement dynamique
(DMTL) pour les
|
|
réponses mode S
|
26
|
|
Figure 1.15 : Détecteur des impulsions d'encadrement
|
27
|
|
Figure 1.16 : Apparitions des cibles fantômes à
partir de deux cibles adjacentes ...
|
28
|
|
Figure 1.17 : coïncidence -SPI
|
28
|
|
Figure 1.18 : Détection et décodage synchrone
|
29
|
|
Figure 1.19 : Diagramme de rayonnement de l'antenne MONOPULSE
|
. .31
|
|
Figure 1.20 : Fonction d'écartomètrie
|
.31
|
|
Figure 1.21 : Circuit proposé d'écartomètre
|
32
|
|
Figure 1.22 : Interrogation ROLL CALL
|
35
|
|
Figure 1.23 : Modulation DPSK de l'impulsion P6
|
35
|
|
Figure 1.24 : Format de la réponse mode S
|
36
|
|
Figure 1.25 : Réponse type mode S
|
36
|
|
Figure 1.26 : Sommaire des formas d'interrogations mode S
|
38
|
|
Figure 1.27 : Sommaire des formas de réponse mode S
|
39
|
|
Figure 1.28 : Transactions inter-modes et «appel
général» mode s seulement
|
. 40
|
|
Figure 1.29 : Transactions adressées de surveillance et de
communication
|
de
|
|
longueur standard
|
40
|
|
Figure 1.30 : Transactions de communication de longue
durée
|
40
|
|
Figure 1.31 : Transactions de service et de squitters air-air
|
.41
|
|
Figure 2.1 : Régions de décision
|
44
|
|
Figure 2.2 : Probabilité des erreurs de détection ;
probabilité de non détection
|
et
|
probabilité de fausse alarme 46
Figure 2.3 : Schéma synoptique fondamental du processeur
CFAR 48
Figure 2.4 : Schéma synoptique du processeur CA/GO/SO-CFAR
49
Figure 2.5 : Schéma synoptique du processeur OS-CFAR
.51
Figure 2.6 : Passage du lobe principal d'une antenne radar sur
une cible 53
Figure 2.7 : Schémas synoptique du détecteur
binaire . 53
Figure 3.1 : Le détecteur quadratique à seuil fixe
.. 56
Figure 3.2 : Le signal à l'entrer du récepteur
57
Figure 3.3 : Feuille de mesure du fruit dans la région de
LOS ANGELES 58
Figure 3.4 : Trajet sur lequel la mesure de la fréquence
moyenne d'apparition du FRUIT à été établis
59
Figure 3.5 : Pd et Pfa pour une détection à une seule
récurrence, en fonction du
seuil de détection 64
Figure 3.6 : Schémas synoptique du détecteur
binaire à seuil fixe 65
Figure 3.7 : Pd et Pfa pour une détection binaire en
fonction du seuil de
détection 66
Figure 3.8 : Le schéma synoptique de l'estimateur par la
censure automatique 71
Figure 3.9 : La probabilité de censure et de fausse
censure en
fonction du seuil de détection 72
Figure 3.10 : Schémas synoptique de l'estimateur du FRUIT
73
Figure 3.11 : Signal simulé avec å0 = 0.05 et r=50dB
75
Figure 3.12 : Simulation de å0 et du FNR pour 1000 cellule
test adjacentes 75
Figure 3.13 : Estimation de å0 et du FNR pour 1000 cellule
test adjacentes par la censure direct (N=600) 76
Figure 3.14: Estimation de
å0 et du FNR pour 1000 cellule test adjacentes
par la censure direct (N=6000) 76
Figure 3.15 : La probabilité de détection du
CA-CFAR en fonction du SNR pour r=50dB , å0 = 0,05, N=16 78
Figure 3.16 : La probabilité de détection du
CA-CFAR en fonction du SNR pour L0
=0,05, r=17...50dB et N=16. 78 Figure 3.17 : La
probabilité de détection du CA-CFAR en fonction du SNR pour
r=50dB et L0 = 0,02...0,05 et N=16. 79 Figure 3.18 :
Schémas synoptique du détecteur CA-CFAR-BI...80 Figure
3.19-a : La probabilité de détection du CA-CFAR-BI en fonction du
SNR pour
r=50dB, L0 = 0,05, M=4, L=6 et N=16. 82
Figure 3.19-b : La
probabilité de détection du CA-CFAR-BI en fonction du SNR pour
r=50dB, L0 = 0,05, M=4, L=6 et N=96.
-
82
Figure 3.20 : La probabilité de détection du
CA-CFAR-BI en fonction du SNR pour L0
= 0,05, r=17...50dB, M=4, L=6 et N=16. 83
Figure 3.21 : La
probabilité de détection du CA-CFAR-BI en fonction du SNR pour
r=50dB, L0 =0,02... 0,05, M=4, L=6 et N=16...83 Figure
3.22 : Schémas synoptique du détecteur CA-CFAR-BI-2D...84 Figure
3.23 : La probabilité de détection du CA-CFAR-BI-2D en fonction
du SNR
pour r=50dB, L0 = 0,05, M=4 et L=6 et N=16 86
Figure 3.24 : La
probabilité de détection du CA-CFAR-BI-2D en fonction du SNR
pour L0 = 0,05, r=17...50dB, M=4, L=6 et N=16...87 Figure
3.25 : La probabilité de détection du CA-CFAR-BI-2D en fonction
du SNR
pour r=50dB, L0 =0,02... 0,05, M=4, L=6 et N=16...87 Figure
3.26 : Schémas synoptique du détecteur CA-CFAR-BI-2D-F1F2...89
Figure 3.27 : La probabilité de détection du CA-CFAR-BI-2D(F1F2)
en fonction du
SNR pour r=50dB, L0 = 0,05, M=4, L=6 et N=16...91 Figure
3.28 : La probabilité de détection du CA-CFAR-BI-2D(F1F2) en
fonction du
SNR pour L0 = 0,05, r=17...53dB, M=4, L=6 et N=16...92 Figure
3.29 : La probabilité de détection du CA-CFAR-BI-2D(F1F2) en
fonction du
SNR pour r=50dB, L0 =0,02... 0,05, M=4, L=6 et N=16.
92
Figure 3.30 : La probabilité de détection du
CA-CFAR-BI-2D(F1F2) en fonction du
SNR pour L0 = 0,05, r=17...53dB, M=4, L=6 et N=32. 93
Figure
3.31 : La probabilité de détection du CA-CFAR-BI-2D(F1F2) en
fonction du
SNR pour r=50dB, å0 =0,02... 0,05, M=4, L=6 et N=32
93
Figure 3.32 : La probabilité de détection du
CA-CFAR-BI-2D(F1F2) en fonction du
SNR pour L0 = 0,05, r=17...50dB, M=4, L=6 et N=48. 94
Figure 3.33 : La probabilité de détection du
CA-CFAR-BI-2D(F1F2) en fonction du
SNR pour r=50dB, L0 =0,02... 0,05, M=4,
L=6 et N=48...94
Figure 3.34 : détection d'au moins une
impulsion code...96
Figure 3.35 : La probabilité de détection du
CA-CFAR-BI-2D-(3I) en fonction du SNR
pour r=50dB, L0 = 0,05, M=4, L=6 et N=48. . ..98
Figure 3.36
: La probabilité de détection du CA-CFAR-BI-2D (3I) en fonction
du SNR
pour å0 = 0,05, r=17...50dB, M=4, L=6 et N=48, avec une
Pfa=10-6
99
Figure 3.37 : La probabilité de détection du
CA-CFAR-BI-2D (3I) en fonction du SNR
pour r=50dB, å0 =0,02... 0,05, M=4, L=6 et N=48, avec une
Pfa=10-6.
99
Figure 3.38 : La probabilité de détection du
CA-CFAR-BI-2D (3I) en fonction
du SNR pour L0 = 0,05, r=17...50dB, M=4, L=6 et N=48, avec
une Pfa=10-10. 100
Figure 3.39 : La
probabilité de détection du CA-CFAR-BI-2D (3I) en fonction
du SNR pour r=50dB, L0 =0,02... 0,05, M=4, L=6 et N=48, avec
une Pfa=10-10. 108
Figure 4.1: L'organigramme de la simulation Monte-Carlo 103
Figure 4.2 : La probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction
du SNR pour r=50dB, å0 =0,02... 0,05, M=4, L=6, N=200,
et
nMC = 5000. 105
Figure 4.3 : La probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction du SNR pour r=39dB, L0 =0,02... 0,05, M=4, L=6,
N=200, et
nMC = 5000. 105
Figure 4.4 : La probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction du SNR pour r=28dB, L0 =0,02... 0,05, M=4, L=6,
N=200, et
nMC = 5000. 106
Figure 4.5: La probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction du SNR pour r=17dB, L0 =0,02... 0,05, M=4, L=6,
N=200, et
nMC = 5000. 106
Figure 4.6: la probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction
du SNR pour r=06dB, L0 =0,02... 0,05, M=4, L=6, N=200, et
nMC = 5000. 107
Figure 4.7: la probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction du SNR pour r=0dB, å0 =0,02... 0,05, M=4,
L=6, N=200, et
nMC = 5000...107
Figure 4.8: la probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction du SNR pour r=0dB, å0 =0,02... 0,05, M=4,
L=6, N=200, et
nMC = 5000 Avec une estimation majoré a å0 =0,02 et
r=9dB...108
Tableau 1.1 : Mode d'interrogation du radar secondaire classique.
15
Tableau 1.2 : Tableau codeur d'altitude annexe 10 OACI. ..17
Tableau 1.3 :Bilan de liaison « cible-radar » 24
Tableau 1.4: Bilan de liaison « radar-cible » 26
Tableau 1.5 : Probabilité de détection d'au
moins six réponses...30 Tableau 1.6 : Probabilité de
détection d'au moins deux réponses...30 Tableau 1.7 :
Forme des impulsions d'interrogations inter-modes et mode S...34 Tableau
1.8 : Les interrogations mode S...34
Tableau 1.9 : Structure des données mode S 37
Tableau 2.1 : Les erreurs de détection . 44
Tableau 2.2 : Effet du détecteur binaire sur les
performances de détection...54 Tableau 4.1 : La probabilité de
fausse alarme Pfa3IA imposé par l'erreur d'estimation pour
les différents paramètres FRUIT. 104
INTRODUCTION
Un radar secondaire permet d'obtenir des aéronefs
équipés de transpondeurs, des informations sur leurs
identités ainsi que d'autres informations telles que l'altitude,
signalisation des pannes radios, détournement, détresse... .
Les radars secondaires sont utilisés à la fois
dans des applications civiles et militaires, en tant que radar de surveillance
(SSR) ou radar anti-collision (ACAS). La Convention sur l'Aviation Civile
Internationale, appelée encore norme OACI (Organisation de l'Aviation
Civile Internationale) définit un protocole de communication pour les
radars secondaires dans son annexe 10 (Télécommunications
Aéronautiques), volume IV (Radar de surveillance et systèmes
anti-collision). La norme OACI définit plusieurs modes d'interrogation,
tels que les modes A, C et S. Le mode S se distingue des modes A et C en ce
qu'il permet une interrogation sélective des avions par l'emploi d'un
numéro d'identification propre à chaque avion. Toutefois, les
interrogations et les réponses du mode S sont longues par rapport aux
interrogations et aux réponses en mode A ou C.
On distingue habituellement, parmi les réponses
arrivant sur une antenne radar secondaire, les réponses dites synchrones
qui sont les réponses du transpondeurs, situées dans le lobe
d'interrogation du radar aux interrogations de ce radar, et les réponses
dites asynchrones ou FRUIT (False Replies Un-synchronized In Time), qui sont
les réponses des transpondeurs à des interrogations provenant
d'autres radars.
Il est bien connu que la détection des impulsions
réponses dans le récepteur SSR se fait par rapport à un
seuil fixe, qui est ajusté pour éliminer les fausses alarmes
causés par le bruit du récepteur, cependant ce seuil permet la
détection des réponses asynchrones qui peuvent s'avérer
intense notamment dans l'application à la surveillance de la navigation
aérienne, où la densité d'avions a proximité d'un
aéroport international par exemple peut être très forte et
le nombre de radars secondaires très élevé. Si rien n'est
fait pour éliminer ces réponses asynchrones, le traitement de
l'ensemble des réponses (synchrones et asynchrones), en aval du
récepteur, peut être saturé.
Pour éliminer les réponses asynchrones, un
dispositif appelé défruiteur est utilisé, permettant au
radar secondaire d'éliminer parmi toutes les réponses
reçues, celles qui ne sont pas les réponses à ses propres
interrogations.
Le défruiteur comporte un filtre synchrone qui
vérifie que les réponses reçues au cours des
périodes d'écoute suivant chacune des interrogations, sont
synchrones avec les interrogations du radar. L'interrogation et la
période d'écoute la suivant constituent ce qui est appelé
une récurrence. Le filtre synchrone vérifie donc si les
réponses sont reçues au même instant (temps séparant
l'interrogation de la réponse) de leur récurrence.
Dans notre mémoire nous allons étudier la
détection adaptative CFAR appliquée au radar secondaire de
surveillance pour l'élimination des réponses asynchrones. Pour
cela nous allons introduire un traitement CFAR en poste détection
quadratique, afin d'éliminer ces impulsions interférentes avant
tout traitement de décodage et éviter ainsi la saturation du
décodeur.
Pour cela notre travail va être structuré autour
de quatre chapitres organisés comme suit :
Le premier chapitre concerne les
généralités sur le radar secondaire de surveillance,
telles que le principe de fonctionnement, les principaux problèmes de
détection et l'évolution des solutions apporter par les
concepteurs.
Dans le deuxième chapitre nous étudions
le principe de détection sur la base du critère NEYMAN-PEARSON
pour un seuil fixe et pour une détection à taux de fausse alarme
constant (TFAC) (dans la littérature anglo-saxonne Constant False Alarm
Rate : CFAR).
Le troisième chapitre comporte l'essentiel de
notre travail, il commence par la modélisation du
problème puis l'application des détecteurs à seuil fixe et
des détecteurs CFAR en passant par l'estimateur des paramètres
FRUIT.
Le quatrième chapitre est destiné à
la validation des résultats par la méthode MONTE-CARLO.
CHAPITRE 1
LE RADAR SECONDAIRE DE SURVEILLANCE
1.1. Introduction
Le radar (RAdio Detection And Ranging) de contrôle
aérien est un instrument qui a pour objet de détecter, suivre et
guider les aéronefs dans leur espace de vol. On distingue deux
principaux types : Le radar primaire (PSR) et le radar secondaire de
surveillance (SSR)
Le radar primaire utilise le principe d'émission d'une
énergie électromagnétique, par des impulsions très
courtes et détecte les impulsions échos réfléchie
par les cibles. La position, la vitesse radiale et l'angle d'azimute d'une
cible sont alors déterminer sans que celle-ci ne soit
identifiée.
Le radar secondaire de surveillance est utilisé pour
l'identification des cibles et la surveillance de l'espace aérien. Son
principe est basé sur les modes d'interrogations et les réponses
associées retransmise par les transpondeurs embarqué.
Le radar secondaire, ou bien l'IFF (Identification Friend Foe)
est un system destiné à faciliter l'identification d'un mobile et
l'obtention d'autres informations que sa position. Le système se compose
essentiellement:
· Au sol : d'un interrogateur associé au radar
primaire (antennes liées mécaniquement)
· À bord : d'une antenne omnidirectionnelle
associée au répondeur.
Interrogé sur un mode déterminé, le
répondeur IFF de bord (ou transpondeur en aviation civile) répond
par une suite d'impulsions HF qui forment un code destiné à
être décodé par l'équipement au sol délivrant
ainsi l'information désirée.
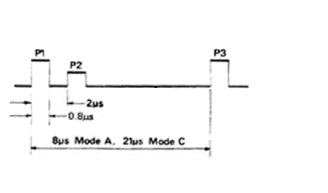
Les signaux d'interrogations, comme le montre la Figure 1.1,
sont constitues par une paire d'impulsions P1 et P3 de fréquence 1030
MHz et de puissance crête de 1 à 2 kW. L'espacement entre ces deux
impulsions détermine le mode d'interrogation (l'impulsion P2 a une
fonction qui sera définie plus loin).
13
Figure 1.1 : Signal d'interrogation mode A/C
Le signal réponse est constitué d'un train
d'Impulsions de fréquence 1090 MHz comprenant (Figure 1.2) :
> deux impulsions d'encadrement espacées de 20,3 us
toujours présentes. > douze impulsions espacées de 1,45 us,
qui sont présentes ou non suivant le code utilisé.
> L'impulsion spéciale de positionnement «
Special Position Indicator SPI », qui est transmise a la demande du
contrôleur.
> L'impulsion X, qui n'est plus utilisée, et qui
indiquais la position du train d'atterrissage.
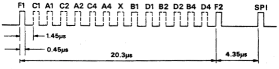
Figure 1.2 : signal réponse mode A/C
Les principaux modes d'interrogation et les réponses
associées sont les modes 1, 2, 3/A, C, et le plus récent, le mode
S (sélectif), qui permet par un protocole de communication
différent un échange plus riche en information ainsi que d'autres
avantages qui seront décrits à la fin de ce chapitre. Les modes B
et D ne sont plus utilisés.
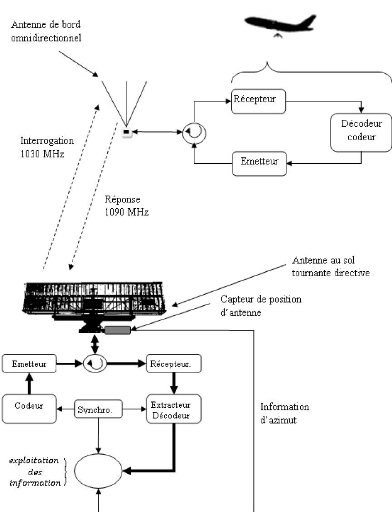
Les signaux reçus par l'interrogateur subissent
différents traitements avant d'être décodés.
L'association de cette information à celle issue du radar primaire
permet d'apporter une aide précieuse à toutes les
opérations
d'identification et de contrôle des objets
détectés. La Figure 1.3 illustre la synoptique de la chaine de
communication radar secondaire-transpondeur.
On peut distinguer selon le protocole de communication deux
modes d'interrogations du radar secondaire :
> Les modes classiques 1, 2, 3/A, C > Le mode
sélectif (mode S)
1.2. Les modes classiques
1.2.1. Le signal d'interrogation
Le signal d'interrogation transmit de la station sol vers
l'avion à la fréquence 1030MHz illustré sur la Figure 1.1,
comprend trois impulsions P1, P2 et P3 chacune de durée de 0,8us.
L'espacement entre P1 et P3 dépend du mode d'interrogation alors que
l'espacement entre P1 et P2 est fixe (2us).
Le Tableau 1.1 met en évidence les différents
modes avec l'espacement adéquat P1-P3
Tableau 1.1 : mode d'interrogation du radar secondaire
classique.
MODE
|
espacement
P1-P3 en us
|
Utilisation
|
utilisateur
|
1
|
3
|
Identification ; 32 codes sur deux bits (00 à
73)
|
Militaire
|
2
|
5
|
Identification ; 4096 codes sur quatre bits
(0000 à
7777).
|
Militaire
|
3/A
|
8
|
Identification ; 4096 codes sur quatre bits
(0000 à 7777).
|
civile
/militaire
|
C
|
21
|
Altitude ; 1278 codes altitudes sur quatre bits
(de -1,000 a
+126,700 pieds avec
incrément de 100 pieds)
|
Civile
|
|
Les modes A et C sont les principaux modes utilisés en
aviation civile, on les utilise généralement de façon
alterné (mode A/C) par exemple : A A C C A A C C....
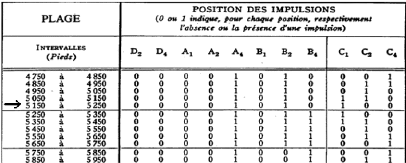
1.2.2. Le signal réponse
Les signaux réponses générés par
les transpondeurs à la fréquence 1090MHz sont composés de
deux impulsions d'encadrement F1 et F2 contenant 12 impulsions de
données désignées par A, B, C, D suivi d'un suffixe 1, 2,
4, le signal contient aussi l'impulsion « SPI » et l'impulsion X.
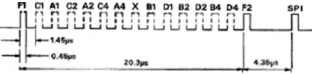
Figure 1.4 : L'arrangement de impulsions réponses
Les 12 impulsions de données A1 A2 A4 B1 B2 B4 C1 C4 D1
D2 D4 permette d'allouée 4096 (212) possibilités de
codes réponse.
> Réponse mode A
Pour les réponses en mode A toutes les 4096
possibilités de code sont utilisées. Le code identité est
extrait du signal réponses en prenant la valeur octal des impulsions de
réponse dans l'ordre ABCD tel que :
A= (A1 × 1)
|
+ (A2 ×
|
2)
|
+ (A4 ×
|
4)
|
B = (B1 × 1)
|
+ (B2 ×
|
2)
|
+ (B4 ×
|
4)
|
C= (C1 × 1)
|
+ (C2 ×
|
2)
|
+ (C4 ×
|
4)
|
D = (D1 × 1)
|
+ (D2 ×
|
2)
|
+ (D4 ×
|
4)
|
|
Par exemple prenons la réponse mode A suivante :

F1 C1 A1 A2 C4 A4 X B1 D1 B2 D2 B4 D4 F2 SPI
Figure 1.5 : Réponse mode A (4321) A=4, B=3, C=2, D=1 :
Donc le code est 4321
Le code mode A permet de donner une identité a chaque
avion, pour cela le pilote doit introduire le code identité de l'avion,
attribué par l'organisme de navigation aérienne « ATC »
lors de la préparation du plan de vol.
> Réponse mode C
Une interrogation en mode C entraine une réponse qui
indique l'altitude de l'avion. Pour cela seulement 2048 possibilités de
code sont utilisées pour transmettre une altitude qui peut varier de
-1000 ft à 121000 ft avec un pas de 100 ft.
Le signal d'altitude est obtenu par
l'alticodeur qui attribut a chaque altitude un code
spécifique par le billet d'un Tableau codeur [1], par exemple :

F1 C1 A1 A2 C4 A4 X B1 D1 B2 D2 B4 D4 F2 SPI
Figure 1.6 : Réponse mode C (altitude=5200ft)
ABCD=4210 correspond a l'altitude 5200ft selon le Tableau codeur
d'altitude OACI.
Tableau 1.2 : tableau codeur d'altitude annexe 10 OACI.
1.2.3. Le transpondeur
Le transpondeur installé sur l'avion assure la
réception et le décodage du mode d'interrogation puis la
transmission de la réponse adéquate, il comprend essentiellement
trois éléments :
> Une antenne omnidirectionnelle.
> Un récepteur calé sur 1030 MHz relié a
un décodeur du mode d'interrogation.
> Un émetteur calé sur 1090 MHz modulé
par un train d'impulsion provenant soit du codeur d'identification ou bien de
l'alticodeur.
1.2.4. Principaux problèmes du SSR classiques (mode
A/C):
1.2.4.1. Garbling :« Altération synchrone
»
L'interrogation en mode A/C n'est pas sélective. Donc
tous les avions qui se trouve a l'intérieur du lobe principale
répondent a l'interrogation ce qui cause un entrelacement des
réponses dans le cas ou deux avion sont très proche (3 km = 20,3
us).
La technique MONOPULSE a largement contribué à
la limitation du Garbling, mais avec la croissance du trafic aérien
l'immigration vers le mode sélectif (mode S) est devenue une
nécessité.
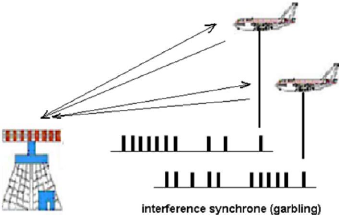
Figure 1.7: Illustration du garble
1.2.4.2. FRUIT « Altération Asynchrone
»
Le FRUIT (False Replies Un-synchronized In Time) est
l'ensemble des réponses reçue par le radar secondaire, sans que
celui ci n'ait transmis une interrogation. Examinant la Figure 1.8 :
L'interrogateur B interroge l'avion 1 qui lui répond
correctement. Bien que cette réponse est destinée a
l'interrogateur B, l'interrogateur A la reçoit aussi (r1).
L'interrogateur A interroge l'avion 2 qui lui répond
correctement (r2), mais cette réponse est altérée par la
réponse (r1) de l'avion 1.
La cadence d'interrogation (IRF-Interrogation Repetition
Frequency) de A et de B sont différentes, donc la réponse
interférente (de l'avion 1) est asynchrone par rapport a la
réponse désirée (avion 2), c'est cette
propriété qui va être exploitée pour éliminer
cette interférence.
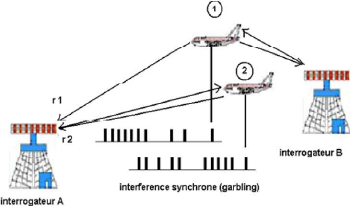
Figure 1.8 : Illustration du FRUIT D'autre système
peuvent interférer de la même manière :
> ACAS > ADS-B
Le processus utilisé Pour effectuer le filtrage
synchrone des réponses est appeler « DEFRUITER », il repose
sur la technique de la fenêtre glissante (sliding windows).
1.2.4.3. Pas de réponse
Différentes situations peuvent se présenter pour
le cas de pas de réponse :
> Le transpondeur répond à une autre
interrogation. > Le transpondeur en mode temps mort (Dead Time). >
Interrogation sur un lobe secondaire.
> Saturation du transpondeur.
> Interruption du transpondeur :
- Interruption par un autre équipement (DME, ACAS). -
Séquence d'interrogation invalide (mode S).
> Antenne du transpondeur masqué.
1.2.4.4. Le Multi trajet
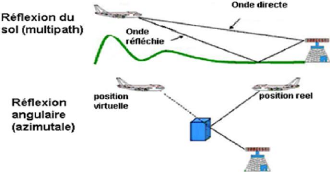
Figure 1.9 : Le multi trajet
La réflexion des signaux d'interrogations et de
réponses, sur des bâtiments ou bien sur le sol peuvent induire en
erreur le radar secondaire sur la position de l'avion et crée ainsi des
cible fantôme. Le système IISLS (ISLS améliorer) a
considérablement contribué à l'élimination de ce
type de problème.
1.2.4.5. Les cible fantômes
La détection des réponses en mode A/C repose
sur le fait que celle-ci sont encadrer par les impulsions F1 et F2
(séparées de 20,3 us), se qui inclus que la présence de
l'impulsion SPI sur une réponse isolé, ou bien
la présence de plusieurs réponses successives très proches
ou entrelacées, provoque la détection de fausses impulsions
d'encadrements, cette détection est dite fantôme.
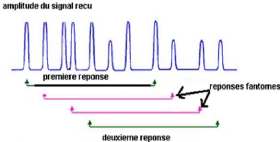
Figure 1.10 : Les cibles fantômes
1.2.5. Systèmes d'éliminations des
interrogations sur le lobe secondaire
1.2.5.1. Système « ISLS »
La suppression des interrogations sur les lobes secondaire
(Interrogation path Side-Lobe Suppression) est basée sur la
génération de l'impulsion P2 nommé impulsion de
contrôle, qui est rayonnée dans toutes les directions sauf dans la
direction du lobe principale comme indiqué sur la Figure 1.11. De cette
manière le transpondeur pourra différencier entre une
interrogation transmise par le lobe principale et une interrogation transmise
par un lobe secondaire en comparant l'amplitude de P1 à l'amplitude de
P2 :
· Si amp(P1)> amp(P2) alors l'interrogation est
transmise par le lobe
principale, elle est donc prise en
considération.
· Sinon elle est transmise par un lobe secondaire, elle
sera donc ignorer.
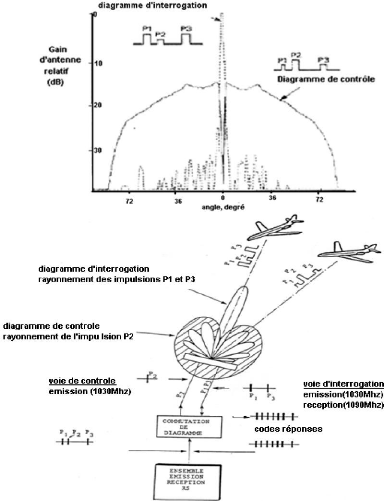
Figure 1.11: diagramme de rayonnement du SSR et système
ISLS 1.2.5.2. Système « IISLS »
Le system IISLS (Improved Interrogation path Side-Lobe
Suppression) est une amélioration du système ISLS, il consiste a
simulé une suppression des interrogations sur les lobes secondaire par
l'émission de deux impulsion P1' et P2' indépendantes de P1 et
P2, sur l'antenne de contrôle et qui vont inhiber les transpondeurs ne se
trouvant pas sur le lobe principale.
L'inconvénient de ce système est que cette
inhibition va réduire au silence tout les transpondeur interroger par
d'autres SSR, pour cette raison ce système n'est utilisé que dans
certaine direction ou le risque d'avoir un multi trajet est grand.
1.2.6. Bilan de liaison
Il y a deux liaisons distinctes à définir :
> Liaison radar-cible :????????????
????????????
????????.????????.????????2
????2
= ????. ????????. ????????
=
1
×
(4????)2
????????.????????.???????? 2
=
1
×
(4????)2
????2
> Liaison cible-radar : ????????????
????????????
= ????. ????????. ????????
???? × (4????????)2
Où :
???????????? : Puissance crête d'émission de
l'interrogateur ???????????? : Puissance crête d'émission du
transpondeur ???????????? : Puissance reçue par l'interrogateur
???????????? : Puissance reçue par le transpondeur
???????? : Gain de l'antenne de l'interrogateur ???????? : Gain
de l'antenne du transpondeur
ëa : Longueur d'onde utilisée
ëa =0.29m pour F=1030MHz, ëa =0.275m pour F=1090MHz. R
: Distance radar cible
????: Pertes entre aériens
En ajoutant les Pertes additionnelles ???? :
· Puissance reçue par le transpondeur
???????????? =
????????????. ????????. ???????? ????????2
???? × (4????????)2
· Puissance reçue par l'interrogateur
1.2.6.1. Liaison cible-radar >
Pertes dans la liaison
En plus de la perte majeure que nous allons notée ????1,
d'autres pertes
additionnelles (????) interviennes, elles seront notées
????2, ????3, ????4 ???????? ????5.
1' ????1: Perte entre aériens : Prenant ëa=0.275 m
et R=200MN=370Km
????1 = (4????????)2 = (6 × 10-8)2 ?
????1(????????) = 20 log(6 × 10-8) = -144,6 ????????
???????? 2
1' ????2: Perte dans la ligne de transmission entre les
ensembles E/R
(émetteur récepteur) et les aériens : cette
perte est de -3 dB
1' ????3: Pertes dues à l'atténuation
atmosphérique (0,005 dB/Km en bande L) 1' ????4: Perte due à la
diminution du gain d'antenne a partir de l'élévation 0,25°.
1' ????5: Perte due à la réduction du gain pour les cibles
proches. Cette
atténuation sert a limité la puissance des
impulsions reçues par les transpondeurs très proches.
> La puissance au niveau du radar
L'OACI impose une puissance d'émission minimale du
transpondeur de 125W (21dBW).
Tableau 1.3 : bilan de liaison « cible-radar »
[2]
|
distance
|
|
100 NM
|
200 NM
|
250 NM
|
Puissance
émise par le
transpondeur
|
+24 dBW
Ou
+54dBm
|
+24 dBW
Ou +54dBm
|
+24 dBW
Ou +54dBm
|
+24 dBW
Ou +54dBm
|
Gain d'antenne
en réception
|
+27 dB
|
+27 dB
|
+27 dB
|
+27 dB
|
????1
|
-92,5dB
|
-138,6 dB
|
-144,6 dB
|
-146,5 dB
|
????2
|
-3dB
|
-3dB
|
-3dB
|
-3dB
|
????3
|
0,0dB
|
-0,9dB
|
-1,4dB
|
-1,6dB
|
????4
|
-3,5dB
|
-3,5dB
|
-3,5dB
|
-3,5dB
|
????5
|
-22dB
|
-10,9 dB
|
-4,3 dB
|
-2,1 dB
|
Puissance du
signal reçu
|
-40dBm
|
-76 dBm
|
-76 dBm
|
-76 dBm
|
|
> Caractéristique du récepteur du radar
Au niveau du récepteur la puissance du bruit ( ????????
) est évaluer par
l'expression :
???????? = ????× ????× ????? × ????????
Avec :
1' Facteur de bruit: ???????? = 12 ????????.
v' La bande passante doit permettre le passage sans distorsion
d'un front
montant de l'impulsion de 0.1us ; donc ????? =
10????????????.
v' La température ambiante ; T300°k. v' K constantes
de Boltzmann.
???????? = 1,38.10-23 × 300 ×
107 × 16 W
???????? 4,14 × 16 × 10-11???? =
-91,79????????????
> Le seuil minimal détectable du récepteur
(MTL)
La valeur du seuil minimal détectable (Minimum
Triggering Level) prend la valeur typique « -80dBm », cette valeur
est inferieur à la magnitude du signal reçu d'au minimum 4 dBm,
et elle est supérieur au bruit d'enivrent 10dBm.
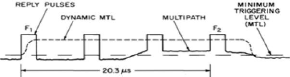
Figure 1.12 : niveau minimal de déclenchement (MTL,
DMTL)
> Le seuil dynamique (DMTL) :
Le seuil dynamique (dynamic minimum threshold level, DMTL) a
été introduit pour éliminé le multi trajet, il est
activer si le signal vidéo dépasse le seuil MTL de 12dB. Le
nouveau seuil est ajusté pour garder un dépassement de 9dB pour
le radar secondaire classique et de 6dB pour le radar secondaire mode S.
L'inconvénient du DMTL est qu'il peut éliminer
des réponses faibles entrelacées avec des réponses fortes.
La méthode d'interrogation par « chuchotement » [5] est
utilisée pour parvenir à avoir des réponses de même
niveau de puissance.

Figure 1.13 : niveau minimal de déclenchement dynamique
(DMTL) mode A/C)
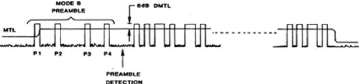
Figure 1.14 : niveau minimal de déclenchement dynamique
(DMTL) mode S 1.2.6.2. Liaison radar-cible
> La puissance au niveau de la cible :
Pour limiter les interrogations reçues par les avions
hors porté, l'OACI a plafonné à 52.5 dBW, la puissance
émise par le Radar Secondaire.
Tableau 1.4: bilan de liaison « radar-cible »
|
distance
|
|
100 NM
|
200 NM
|
250 NM
|
Puissance
émise par
le radar
|
+52,5 dBW Ou +82,5dBm
|
+52,5 dBW Ou +82,5dBm
|
+52,5 dBW Ou +82,5dBm
|
+52,5 dBW Ou +82,5dBm
|
????1:
|
-92,5dB
|
-138,6 dB
|
-144,6 dB
|
-146,5 dB
|
????3:
|
0,0dB
|
-0,9dB
|
-1,4dB
|
-1,6dB
|
????4:
|
-3,5dB
|
-3,5dB
|
-3,5dB
|
-3,5dB
|
Puissance du signal reçu
|
-13dBm
|
-60 dBm
|
-66,7dBm
|
-68,9 dBm
|
|
> Caractéristique de réception du
transpondeur :
Au niveau du récepteur la puissance du bruit ( ????????
) est évaluer par
l'expression :
???????? = ????× ????× ????? × ????????
Avec :
1' T270°k
1' ????????, ????? et ???? garde les mêmes valeurs que
pour un récepteur sol.
????????
|
=
|
1,38.
|
10-23 × 270
|
× 107 × 16
|
W
|
????????
|
=
|
5,96
|
× 10-11???? =
|
-92,25????????????
|
|
|
> Le seuil minimal détectable du transpondeur
Fixé par l'OACI à MTL= -71dBm, cette valeur est
inferieur à la magnitude du signal reçu d'au minimum 2dBm, et
elle est supérieur au bruit d'enivrent 20dBm.
1.2.7. Détection et décodage
1.2.7.1. Détection des impulsions
d'encadrements F1 et F2
Le premier pas est de détecté la
présence possible des réponses en introduisant le signal
vidéo reçu dans un registre à décalage de 20,3us
(Figure 1.15) avec une porte AND qui détecte simultanément les
deux impulsions F1 et F2 l'une a l'entré du registre et l'autre a sa
sortie.
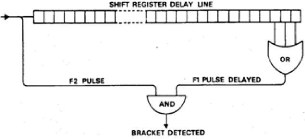
Figure 1.15 : détecteur des impulsions d'encadrement
Une tolérance sur la duré entre F1 et F2 est
permise [1] Cette tolérance est réalisée par une porte OR
a plusieurs entrées.
Le problème des cibles fantômes est
limité par deux circuits : Un circuit qui ignore toute les
réponses détectées entre deux réponses
entrelacé ou bien successives (Figure 1.16), et un autre circuit, qui
annule toute seconde détection situé à 4,35 us
après une première détection (Figure 1.17 :
coïncidence -SPI).
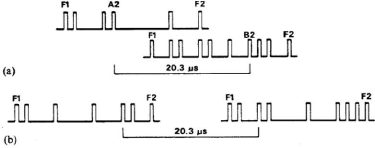
Figure 1.16 : apparitions des cibles fantômes à
partir de deux
cibles adjacentes
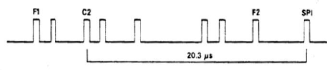
Figure 1.17 : apparitions des cibles fantômes à
partir de la
coïncidence -SPI
1.2.7.2. Décodage des réponses
Dés la détection des impulsions d'encadrement
une lecture sur le registre a décalage est opérer. Ce code de 13
impulsions est décodé selon le mode d'interrogation (A ou C) et
orienté vers l'affichage.
Cependant il faux noté qu'en cas d'entrelacement des
réponses, ce code peut être erroné.
Dans le cas ou l'entrelacement est asynchrone (FRUIT), la
corrélation des réponses par le procédé de la
fenêtre glissante (sliding windows) permet d'avoir le bon code, par
contre si l'entrelacement est synchrone (garble) il devient très
difficile de déterminé le bon code. Le développement de la
technique MONOPULSE a permit de réduire considérablement ce
problème.
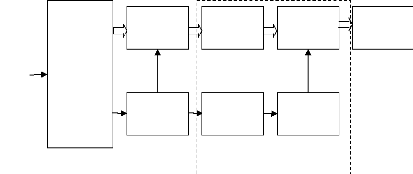
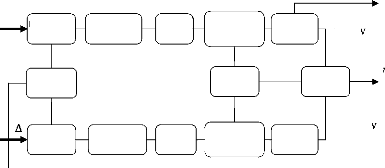
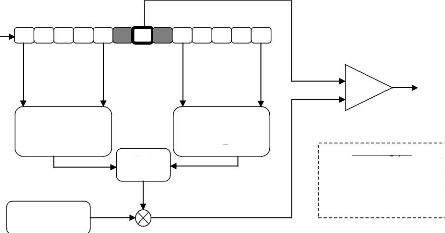
1.2.7.3. La fenêtre glissante
Le processus général de détection
synchrone, comme il est décrit sur la Figure 1.18 est
réalisé essentiellement par la mémorisation et la
corrélation des réponses détectées. Ces
réponses sont rangées selon leurs positions dans des
cellules mémoires, avec création d'un nouvel
espace mémoire après chaque interrogation.
Détection
des
réponses
et
décodage
vidéo
Génération
des plots
Génération des
messages
réponse
Détection des
réponses
synchrone
Mémorisation des détections
Mémorisation
des messages
réponses
Fenêtre glissante
Corrélation
des
détections
Elimination
du FRUIT
Figure 1.18 : détection et décodage synchrone
Un critère de M réponses
détectées successivement sur les N cellules de la fenêtre
(typiquement 6 sur 12) est imposé pour confirmer la présence
d'une cible et déclencher la génération du plot dans la
position médiane entre la première et la dernière
détection.
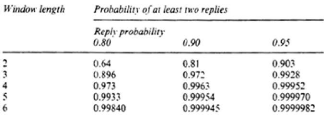
1.2.7.4. Probabilité de détection
La probabilité de détection d'une
réponse dépond de la probabilité de réponse du
transpondeur et du nombre minimal de réponses nécessaire pour
déterminer qu'une cible existe. Ces paramètres sont
relatés par l'expression suivante:
????
???????????? = ~ ????!
????! (???? - ????)! ???????? (1 - ????)????-????
???? =????
Où :
· ???????????? : Probabilité de détection
d'une réponse
· L : Longueur de la fenêtre glissante
· M : Nombre minimal de réponses
· ???? : probabilité de réponse du
transpondeur
Pour le mode SSR conventionnel la longueur de la fenêtre
glissante, est d'au minimum six récurrences .Le Tableau 1.5
résume le calcul pour une détection avec fenêtre
glissante.
Tableau 1.5 : Probabilité de détection d'au moins
six réponses
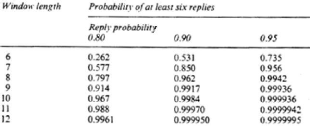
Dans le cas du MONOPULSE la longueur de la fenêtre
glissante requise diminue (deux), grâce à l'information d'azimut
de chaque impulsion réponse (Tableau 1.6).
Tableau 1.6 : Probabilité de détection d'au moins
deux réponses
1.3. Le MONOPULSE (MSSR) :
La principale utilité de la technique MONOPULSE est
d'extraire une information précise de l'azimut d'une cible à
partir d'une seule réponse, alors que dans le SSR traditionnel, l'azimut
est déduit après intégration de 6 à 8
réponses.
La technique MONOPULSE utilise deux diagrammes de rayonnement,
le diagramme somme (Ó) et le diagramme différence(Ä) en plus
du diagramme de contrôle comme illustrer dans la Figure 1.19.
Le diagramme somme (Ó) est utiliser en émission
(interrogation) et les deux diagrammes (Ó et Ä) sont
utilisés en réception. Ainsi la réception sur ces deux
diagrammes des impulsions de réponse, permet de donner une information
précise de l'azimut de chaque impulsion.
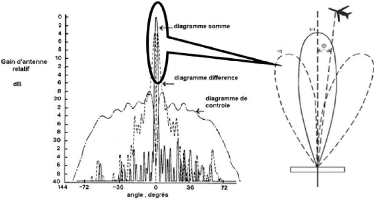
Figure 1.19 : diagramme de rayonnement de
l'antenne
MONOPULSE
Sur la Figure 1.19 est décrit l'angle è, qui est
l'angle de dépointage de l'objectif (Off-Boresight Angle OBA), il est
déduit comme le montre la Figure 1.20
(a) et (b) de la fonction d'écartomètrie :
????(????) =?/Ó .
La fonction d'écartomètrie ????(????)
Dépend des caractéristiques de
l'antenne.
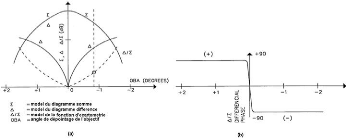
Figure 1.20 : fonction d'écartomètrie
Il est illustrer sur la Figure 1.21 le schéma
synoptique « type » d'un récepteur MONOPULSE, à sa
sortie, les impulsions reçu et détecter sur le lobe principale (
Ó vidéo out) sont délivrer avec une information sur l'OBA
de chaque impulsion et une information supplémentaire pour
l'élimination des impulsions reçues sur les lobes secondaires
(Ù vidéo out), ce signal est aussi appelé Receiver Side
Lobe Suppression (RSLS) .
Ó vidéo out
Ó
Mélangeur
Filtre
Détecteur
VAWWM
OBA
Droite
Calcule de
l'OBA
Gauche
W66VIMRcM
Filtre
Mélangeur
Détecteur
Oscillateur
local
Amplificateur
FI
Amplificateur
FI
Amplificateur
logarithmique
Amplificateur
logarithmique
Détecteur
de phase

Mélangeur
Filtre
Détecteur
Ù vidéo out
Ù
Amplificateur
FI
Amplificateur
logarithmique
Figure 1.21 : circuit proposé
d'écartomètre
> RSLS (Receiver Side Lobe
Suppression)
Si nous revenant sur la définition du FRUIT. C'est
l'ensemble des réponses reçus par le radar secondaire, sans que
celui ci n'ait transmit une interrogation. Ces réponses peuvent
être reçues sur le lobe principal ou bien sur les lobes secondaire
du diagramme somme (Ó), pratiquement la majorité (deux tiers,
2/3) du FRUIT est reçue sur les lobes secondaires.
Ont peut détecter la réception du FRUIT sur les
lobes secondaire, en utilisant en réception le diagramme de
contrôle (Ù) et en comparant les impulsions issu de ce diagramme
aux impulsions issu du diagramme d'interrogation (somme Ó) :
;Si imp (Ó) > imp (Ù) alors l'impulsion vient du
lobe principale, sinon elle vient d'un lobe secondaire.
Il est plus prudent de marquer cette impulsion que de
l'éliminer, car il est possible que cette impulsion masque une autre
impulsion faible issue du lobe principale.
1.4. Le mode sélectif (mode S)
Avec l'accroissement de l'industrie aéronautique, Le
radar secondaire mode A/C d'identification des aéronefs et de leurs
altitudes arrive à sa limite d'exploitation. En effet le nombre d'avion
a considérablement augmenter, or plus d'avion veut dire plus de garble
et plus de FRUIT, aussi ce mode ne peut avoir qu'un nombre limiter de code
d'identification (4096 codes).
Interroger un avion, sans risquer qu'un autre nous
réponde et le moyen le plus efficace pour lutter contre le garble, c'est
la première caractéristique du mode S.
Le mode S permet un codage d'identification sur 24-bits (16,
777, 216 possibilité de code), aussi un échange plus riche en
information dans les deux sens (avion-station et station-avion), des
informations très utiles qui peuvent donner la situation aérienne
en temps réel, non seulement aux contrôleurs mais aussi aux
différents avions équipés d'un transpondeur mode S.
La principale contrainte au le développement du mode S
est de garantir la compatibilité avec le mode classique (A/C), pour
assurer une transition graduelle vers le nouveau mode.
1.4.1. Les signaux d'interrogation
L'interrogation Mode S est très semblable à
l'interrogation du Mode A/C, la fréquence d'émission reste 1030
MHz et il y a deux types différents d'interrogation : l'appel individuel
(ROLL CALL) et l'appel général (ALL CALL).
Les interrogations ALL CALL obtiennent des réponses de
tout les avions qui se trouvent dans le lobe principal.
Les interrogations ROLL CALL sont adressées
sélectivement à un seul transpondeur Mode S, en utilisant les
24-bit d'adresse unique assigné à chaque avion. Seulement
l'avions adressé Répond.
Les interrogations ALL CALL et ROLL CALL sont utilisées
alternativement, pour reconnaitre les codes identificateur des
avions présent sur le lobe principal, puis les interroger un a un.
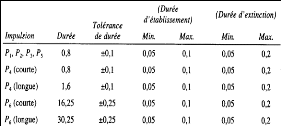
Les interrogations intermodes et mode S se composent d'une
séquence d'impulsions P1, P2, P3, P4, P5 et P6. Les
formes de ces impulsions seront conformes au Tableau 1.7 [1] :
Tableau 1.7 : forme des impulsions d'interrogations inter-modes
et mode S
Le Tableau 1.8 illustre les différents types
d'interrogations, que peut émettre un radar secondaire mode S, et les
réponses associé, selon le type du transpondeur :
Tableau 1.8 les interrogations mode S
|
Type
d'interrogation
|
Format des impulsions
(largeur de P4)
|
Type de réponse
|
|
Transpondeur
mode S
|
Transpondeur
mode A/C
|
|
Interrogation
«ALL CALL»
modes
A/C
|
|
Pas de
réponse
|
Réponse mode
A/C
|
|
|
|
|
|
|
Interrogation
«ALL
CALL»
|
|
Réponse mode
S
|
Réponse mode
A/C
|
|
modes A/C/S
|
|
|
|
|
|
Interrogation
modes S
|
|
Réponse mode
S
|
Pas de
réponse
|
|
|
|
|
|
? Les interrogations ALL CALL
L'interrogation ALL CALL est reconnue par la présence
de l'impulsion p4. La durée de cette impulsion désigne le mode de
l'interrogation ALL CALL (only A/C ou A/C/S). L'absence de P4 indique une
interrogation classique (A/C), ce qui implique une réponse classique
quelque soit le type de transpondeur présent (mode S, A/C)
? Les interrogations ROLL CALL (sélective)
Les impulsions p1 et p2 de l'interrogation mode S, ont la
même puissance (émises toute les deux par le diagramme somme
Ó), ce qui activera le system ISLS du transpondeur SSR classique (A/C)
pour ignorer cette interrogation. Donc seulement les transpondeurs mode S
répondent à cette interrogation.

Figure 1.22 : interrogation ROLL CALL
La durée de l'impulsion P6 et de 16.25us ou bien de
30.25us, elle contient des données modulées en DPSK avec une
fréquence de 4MHz, ce qui nous donne largement la possibilité de
transmettre un paquet de 56 ou112 bit. La première inversion de phase
marque le début de la trame de données, elle se situe dans
l'intervalle compris entre 1,20 et 1,30 us suivant le bord avant de l'impulsion
P6. Chaque inversion de phase marque un (1) Un binaire, s'il n'y a pas
d'inversion de phase alors on a un zéro.
Figure 1.23 : modulation DPSK de l'impulsion P6
L'impulsion P5 est émise par le diagramme
omnidirectionnel (Ù) pour jouer le rôle de l'impulsion P2 (radar
secondaire classique), c.à.d, l'élimination des lobes secondaire.
Si l'impulsion P5 est plus puissante que l'impulsion P6, elle va brouiller le
premier saut de phase, et la suite de la trame sera perdue.
1.4.2. Les réponses mode S
Suite a une interrogation ALL CALL A/C/S OU ROLL CALL, le
transpondeur mode S répond par un signal constitué d'un
préambule de 8 us et d'un signal utile (Bloc de données) de 56 ou
112 us, selon l'interrogation :
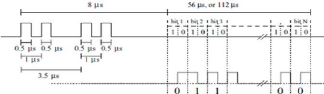
Figure 1.24 : Format de la réponse mode S
? Le préambule : 4 impulsions de 0,5us disposer comme le
montre la
Figure 1.24
? Bloc de données : le bloc de données est
modulé en PPM (Pulse Position
Modulation) à la fréquence de 1 MHz. Une
impulsion transmise dans la première moitié de l'intervalle
représentera un bit UN, tandis qu'une impulsion transmise dans la
seconde moitié représentera un bit ZERO.

Figure 1.25 : Réponse type mode S 1.4.3. Structure
des données mode S
Toutes les transmissions mode S contiendront en plus du champ
de données, deux champs essentiels. L'un de ces champs est un
descripteur qui définira uniquement le format de la transmission. Il
apparaîtra au début de la transmission, quel que soit le format.
Les descripteurs seront désignés par les champs UF (format
montant) ou DF (format descendant). Le deuxième champ essentiel sera un
champ de 24 bits qui apparaîtra à la fin de chaque transmission et
contiendra l'information de parité. Ils sont désignés par
AP (adresse/parité) ou PI (parité/identificateur
d'interrogateur).
Tableau 1.9 Structure des données mode S
|
Champs descripteur
|
Champs de données
|
Champs parité/identificateur
|
|
5 ou 2 bits
|
27 ou 83 bits
|
24 bits
|
> Champs descripteurs
1' UF - Format montant : Ce champ (qui comporte 5 bits sauf
dans le format 24 où il en comporte 2) servira de descripteur du format
montant dans toutes les interrogations mode S et sera codé
conformément à la Figure 1.26.
v' DF - Format descendant : Ce champ (qui comporte 5 bits sauf
dans le format 24 où il en comporte 2) servira de descripteur du format
descendant dans toutes les réponses mode S et sera codé
conformément à la Figure 1.27.
> Champs parité/identificateur (Protection contre
les erreurs)
Le codage de contrôle de parité sera
utilisé dans les interrogations et les réponses mode S pour
assurer une protection contre les erreurs. Une séquence de 24
bits de contrôle de parité sera produite et intégrée
dans le champ formé par les 24 derniers bits de toutes les transmissions
mode S. Les 24 bits de contrôle de parité seront soit
combinés au codage de l'adresse, ou bien au codage de l'identificateur
d'interrogateur. La combinaison ainsi obtenue constitue soit le champ AP
(adresse/parité), ou bien le champ PI (parité/identificateur
d'interrogateur).
v' AP -Adresse/parité : Ce champ de 24 bits (33-56 ou
89-112) apparaîtra dans tous les formats montants et dans les formats
descendants actuellement définis, sauf pour la réponse
«appel général» mode S seulement dans le format 11 (DF
= 11). Ce champ contiendra les bits de parité en surimpression sur
l'adresse de l'aéronef.
1' PI - Parité/identificateur d'interrogateur : Ce
champ descendant de 24 bits (33-56) ou (89-112) comportera les bits de
parité en surimpression sur le code d'identité d'interrogateur,
et apparaîtra dans la réponse «appel
général» mode S (DF = 11) et dans le squitter long
(DF-17).
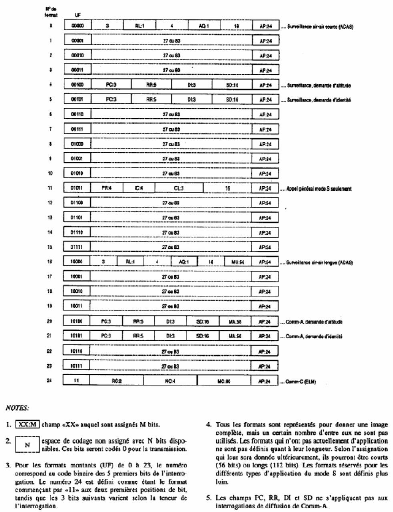
Figure 1.26: sommaire des formats d'interrogations mode S
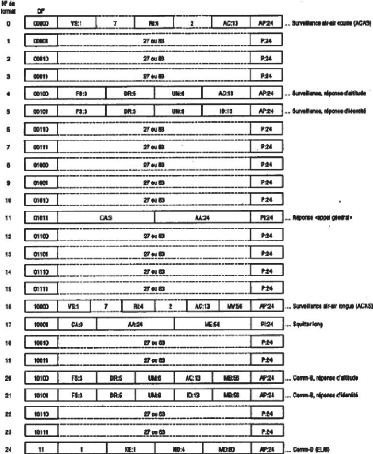
Figure 1.27 : sommaire des formats de réponse mode S
> Champs de données
Cet espace de codage restant sert à transmettre les
données, disposer en fonction du champ descripteur et
définît sur les figures 1.32 et 1.33 [1].
1.4.4. Principales transactions mode S
Le protocole mode S est utiliser pour la surveillance, la
communication et pour le système anti collision. Les transactions
peuvent être classées selon leurs missions. Les Figures 1.34,
1.35, 1.36 et 1.37 illustres les différentes transactions
utilisées avec leurs contenus.
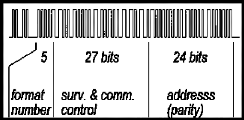
Figure 1.28 : Transactions inter-modes et «appel
général» mode s seulement

Figure 1.29 : Transactions adressées de surveillance et
de communication de
longueur standard

Figure 1.30 : Transactions de communication de longue
durée
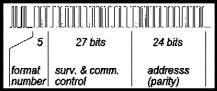
Figure 1.31 : Transactions de service et de squitters air-air
1.5. Conclusion
Dans ce chapitre nous avons présenté le
fonctionnement opérationnel et technique du « radar secondaire de
surveillance », puis nous avons étudiés les
différents modes de fonctionnement et le principe de la détection
et décodage MONOPULSE. Dans ce contexte nous avons vu que la
détection se fait par rapport a un seuil fixe prérégler
(MTL) ou bien par rapport a un seuil dynamique (DMTL) qui est fonctionnel si la
puissance du signal reçu dépasse le seuil MTL de 12dB.
L'objectif de notre travail de mémoire est
l'introduction d'un seuil de détection adaptatif dans le système
radar secondaire, afin de minimiser la détection du FRUIT, tout en
maintenant les performances sur la détection des réponses SSR.
CHAPITRE 2
DETECTION CFAR
2.1. Introduction
La partie détection du système de
réception radar est très délicate à concevoir, car
c'est à partir de cette partie qu'ont sépares les cibles
réels des différents parasites qui peuvent apparaitre. Ce domaine
a été sans cesse développé, particulièrement
pour les radars primaires.
Les premiers récepteurs dits classiques, basés
sur un seuillage fixe, ont été utilisé pendent longtemps.
Ces détecteurs simples, déclarent la cible présente si
l'énergie du signal dépasse un seuil de détection fixe
étudié (critère de NEYMAN-PEARSON). Ce principe de
détection présente un inconvénient majeur dû au fait
que la probabilité de fausse alarme est très sensible aux
changements de la puissance des parasites. Pour ce type de détecteur le
seuil peut être ajusté en fonction de l'azimute et de la distance,
afin de l'adapter a l'environnement topologique et à la puissance a
priori reçue de la cible, cette modification permet de reduire les
fausses alarmes tout en gardant une probabilité de détection
satisfaisante.
Cependant La non-stationnarité de l'environnement
(Pluit, vague, nuage,...) fait que la probabilité de fausse alarme peut
augmenter et provoquer non seulement la saturation de l'écran de
visualisation (PPI); mais en plus la saturation du système radar
lui-même. Pour pallier à ce problème les chercheurs dans le
domaine de détection ont pensé à la détection
adaptative, et cela en adaptant le seuil de détection au niveau du bruit
et aux signaux indésirables environnant tout en maintenant la
probabilité de fausse alarme constante.
La première contribution fut apportée par FINN
et JOHNSON [23](en 1968), qui ont proposé le détecteur (Cell
Averaging Constant false Alarm Rate) CA-CFAR qui est une extension directe du
détecteur optimal au sens de Neyman-Pearson. L'estimation de la valeur
du fouillis dans la cellule test est réalisée en utilisant la
moyenne arithmétique des cellules adjacentes. La
performance de ce détecteur à été
démontrée dans le cas du bruit gaussien homogène mais elle
se dégrade dés quand on se trouve dans un environnement
non-homogène et/ou non-stationnaire.
HANSEN et SAWYERS [24] ont trouvé une solution à
ce problème, souvent rencontré dans la détection, en
proposant le détecteur (Greatest Of) GO-CFAR qui consiste à
séparées les cellules de la fenêtre de
référence en deux sous-fenêtres, en amant de la cellule
sous test et en aval. Leurs contenus sont additionnés et le plus grand
des deux est utilisé comme estimateur de la puissance du fouillis. Une
analyse détaillée des performances de ce détecteur a
été faite par « Moore et Lawrence » et Weiss .Ils ont
prouvé qu'en présence des cibles interférentes, les
performances du détecteur GO-CFAR se dégradent.
En étudiant plusieurs détecteurs à seuil
adapté, TRUNK, a démontré que les détecteurs
CA-CFAR et GO-CFAR sont incapables d'extraire les plots de deux cibles proches,
l'une d'elle se trouvant dans la cellule test et l'autre dans l'une des
cellules de références. Pour remédier à ce
problème il a proposé le détecteur (Smallest Of) SO-CFAR.
FINN et JOHNSON, ainsi que RICKARD et DILLARD ont étudié le
problème de deux cibles très proches et sont arrivé
à démontrer la performance du détecteur SO-CFAR.
Une autre technique, basées sur la statistique d'ordre
a été proposée par ROHLING (en 1983) pour un environnement
non homogène, le détecteur (Order Statistic) OS-CFAR qui consiste
à classées par ordre croissant le contenu des cellules de la
fenêtre de référence et de choisir le contenu de la
kème cellule comme estimation de la puissance du fouillis Cette
technique présente un comportement intéressant notamment pour le
cas cibles multiples.
Dérivée de la technique OS-CFAR, la technique
TM-CFAR (Trimmed Mean) consiste à utiliser une moyenne tronquée
pour estimer le fouillis. Une nouvelle fois, le contenu des cellules de la
fenêtre de référence sont classées par ordre
croissant, la moyenne des valeurs intermédiaire (limité par T1 et
T2) dans la fenêtre de référence correspond à la
valeur estimée du fouillis.
2.2. Détection a seuil fixe
La détection des impulsions radar noyé dans le
parasite peut être formulée comme un problème de test
d'hypothèse .L'hypothèse nulle, notée H0, indique que le
signal reçu est dû au parasite et/ou bruit seulement, tandis que
l'hypothèse alternative, notée H1, indique que le signal
reçu est dû à une impulsion radar plus le parasite et/ou le
bruit. Ce test d'hypothèse peut être caractérisé en
terme de performances pour un système de détection radar par la
probabilité d'erreur (probabilité de fausse alarme), qui revient
à décider H1 tandis que H0 est vraie, et de la probabilité
de non détection qui revient à décider H0 tandis que H1
est vraie.
La règle de décision utilisée dans le
domaine de détection radar est celle conçue sur la base du
critère de NEYMAN-PEARSON, qui exige la connaissance
à priori des distributions du parasite et de la cible.
2.2.1. Région de décision
Soit R l'ensemble des valeurs que peut prendre
l'échantillon du signal radar. On distingue deux régions de
décisions R0 et R1 séparées par un seuil dit seuil de
décision (Figure 2.1).
H1 reconnue : signal utile présent
H0 reconnue : signal utile absent

Temps
Y
Seuil de décision
R1
R0
Figure 2.1 : régions de décision
Par rapport au seuil de décision quatre cas se
présentent (tableau 2.1):
Tableau 2.1 : les erreurs de détection
|
Observation Décision
|
vraie
|
|
H0
|
H1
|
|
Reconnue
|
H0
|
Pas d'erreur
|
Non-détection
|
|
H1
|
Fausse alarme
|
Pas d'erreur
|
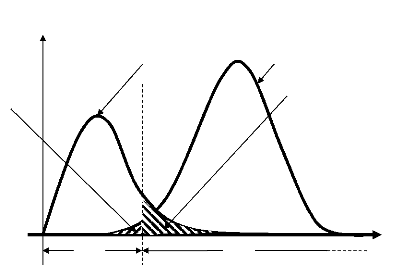
Soit ????(????|????1) la fonction de distribution de
probabilité sous l'hypothèse H1 et ????(????|????0) la fonction
de distribution de probabilité sous l'hypothèse H0,
ainsi:
1. Lorsque H1 est reconnue et H1 est vraie, on a une
détection du signal utile dont la probabilité de détection
est donnée par :
???????? = ~ ????(????|????1) ????????
????1
2. Lorsque H0 est reconnue et H1 est vraie, c'est une erreur
(nondétection) dont la probabilité est donnée par :
???????? = ~ ????(????|????1) ????????
????0
3. Lorsque H0 est reconnue et H0 est vraie, le bruit est au
dessous du seuil :
???????? = ~ ????(????|????0) ????????
????0
4. Lorsque H1 est reconnue et H0 est vraie, l'erreur est
appelée fausse :
???????????? = ~ ????(????|????0) ????????
????1
En plus on sait que la probabilité de reconnaitre H0 sans
faire d'erreur
(????????), et la probabilité de fausse alarme
(????????????) son reliées par l'équation:
???????? + ???????? ???? = 1
De même pour les probabilités de
non-détection et de détection :
46
R0 R1
????
???? (????)
????(????|????0)
????????
????(????|????1)
????????????
Figure 2.2 : probabilité des erreurs de détection
; probabilité de non détection
et probabilité de fausse
alarme
2.2.2. Critère de décision
(NEYMAN-PEARSON)
Le critère NEYMAN-PEARSON consiste à choisir un
seuil de détection
permettant de rendre minimale la probabilité de
non-détection (????????), ce qui
revient à maximiser la probabilité de
détection (????????), tout en gardant une
probabilité de fausse alarme fixe comme contrainte, tel
que ???????????? = D.
Pour parvenir aux résultats escomptés Construisant
la fonction
objective F(ëL), en ajoutant à la fonction a
minimisée (????????) le produit
multiplicateur de Lagrange(ëL) par la contrainte:
???? (ëL) = ???????? + ëL(???????????? - ????) (2.1)
Où :
· ???? est la valeur désirée de la
probabilité de fausse
alarme.
· EL est le multiplicateur de Lagrange
Par ailleurs on a vu que :
· ???????????? = ? ????1 ???? (????|????0) ????????=1 -
???????? = 1 - ? ????0 ???? (????|????0) ????????
· ???????? = ? ????0 ???? (????|????1) ????????
F(ëL) = fR0 f(y|H1) dy + ëL(1 -- fR0 f
(y|H0) dy -- a)
F(AL) = AL(1 -- a) + f[f (y|H1) -- ALf(y|H0)] dy
(2.2)
R0
Dans l'équation (2.2), on remarque que F(ëL)
suivra l'évolution de l'intégrante du deuxième terme, et
la région de décision R0 qui minimisera cette fonction objective
est la solution de l'inégalité suivante:
E(y) = f(y|H0) < AL
f(y|H1)
(2.3)
Où Ë(y) Est le rapport de vraisemblance (likelihood
ratio)
On obtient le test : {Ë(y) < ëL alors on choisi
H0
Ë(y) > ëL alors on choisi H1
Le multiplicateur de Lagrange (ëL) devient ici le seuil de
détection. Ce seuil est déterminé par l'équation
suivante :
(2. 4)
Co
pf ???? = a = P{Ë(y) > ???? |H0} = f P{Ë(y)|H0}
dy
AL
2.3. Détection adaptative a taux de fausse
alarme constant (CFAR)
2.3.1. Détection CFAR conventionnelle
Le mot CFAR est un acronyme de l'anglais
"Constant False Alarm
Rate" qui signifie : taux de fausse alarme constant
(TFAC). La détection CFAR se base sur une
détection à seuil adaptatif qui est calculé en fonction de
la puissance du parasite ambiant.
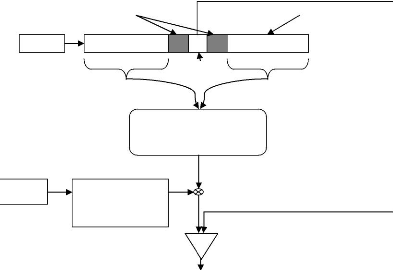
Le processeur CFAR est constitué d'une série de
cellules de retard qui sont de nombre impair. La cellule centrale est dite
cellule sous test, elle contiendra le signal a- détecté. De part
et d'autre de cette cellule se trouvent
deux fenêtres regroupant des cellules dites de
référence qui serviront à estimer la puissance du
parasite.
Pour la raison que l'impulsion contient quelques
échantillons (4 à 5 pour une impulsion de 0,5us à une
fréquence d'échantillonnage de 10 Mhz) on met des cellules de
garde adjacentes à la cellule sous test. Ces cellules ne sont pas
incluses dans la procédure d'estimation, pour éviter tout
débordement d'un signal utile présent dans la cellule test.
SLD
Cellules
Sous test
Cellules de garde
PROCESSUS « CFAR »
Estimation du parasite
Cellules de référence
W
T=fct (P???? a)
Calcule du facteur
d'échelle
TW x
0 1
Pfa=cte
T
Figure 2.3 : schéma synoptique fondamental du processeur
CFAR
2.3.1.1. Probabilité de détection
La probabilité de détection est
évaluée par l'expression [16] :

Pd = P{x > TW|H1} = f P{x > TW|H1} ????W(W)d????
0
Où ????W(W) est la fonction de distribution de W.
En d'autre terme, la probabilité de détection est
généralement définie par l'expression suivante :
???????? = ????[????(???? > ????????|????1)]
|
8
???????? = ????[ ~ ????????(????|????1)???????? ]
????????
|
... (2.5)
2.3.1.2. Probabilité de fausse alarme
... (2.6)
De la même manière la ???????????? est formuler par
:
|
8
???????? ???? = ????[ ~ ????????(????|????0)????????
]
????????
|
X
TCA, TGO ou TSO
X1 XN/2
????/2
???? = ~ ????????
????=1
Sélection
logique
W
XN/2+1 XN
????
????= ~ ????????
????
????=2 +1
WCA = ????+ ???? CA-CFAR
WGO= ????????????(????, ????) GO-CFAR
WSO = ????????????(????, ????) SO-CFAR
Sélection logique :
Décision
H1ou H0
C'est cette équation (2.6) qui servira à
calculer le facteur multiplicatif (T) nécessaire pour fixer la
Probabilité de fausse alarme, sachant que la distribution de W
(estimation du parasite), sera évaluée selon type de CFAR
utilisé.
2.3.2. Quelques architectures CFAR
Les détecteur CA-CFAR, GO-CFAR et SO-CFAR sont de la
même famille, celle des sommes arithmétique, par
conséquent, ont pourra les schématiser par un seul synoptique
incluant une sélection logique pour les différencier.
2.3.2.1. CA-CFAR
La mise en oeuvre du seuil de détection du CA-CFAR est
établie, comme le montre la Figure 2.4, en se basant sur l'estimation du
niveau de puissance du parasite, à partir de la somme
arithmétique des N cellules de référence. Le seuil de
détection est ainsi adapté aux changements locaux de
l'environnement, et chaque cellule de résolution est examinée
séparément pour la prise de décision. Les cellules
entourant la cellule sous test sont connues comme étant les cellules de
référence en portée, nommé aussi, fenêtre de
référence. Les cellules de référence situées
dans le côté gauche de la cellule sous test sont
mentionnées « cellules précédant la cellule sous
test» (soit en anglais: Leading range cells), alors que celles
situées dans le côté droite de la cellule sous test sont
mentionnées « cellules succédant la cellule sous test»
(soit en anglais: Lagging range cells). L'estimation du parasite est
obtenue par la somme arithmétique des échantillons voisins dans
la fenêtre de référence :
N
WCA = >x1 = A+ B
1=1
2.3.2.2. GO-CFAR et SO-CFAR
Les deux autres architectures CFAR de la famille « sommes
arithmétique », qui sont également très importantes
dans le domaine de la détection radars sont les détecteurs
GO-CFAR (Greatest Of-CFAR) et SOCFAR (Smallest Of-CFAR).
Pour contrôler l'augmentation de la Pfa due à la
présence d'un bord de c1utter (c1utter power transition), dans
le cas où la cellule sous test est noyée dans le c1utter, le
détecteur GO-CFAR a été proposé. La sortie de la
sélection logique de ce détecteur (Figure 2.4) est donc le
maximum entre A et B, et peut être exprimée simplement comme suit
:
WGO = max(A, B)
Le détecteur GO-CFAR fonctionne donc mieux dans le cas
où un bord de c1utter est présent dans l'une des deux
demi-fenêtres A ou B, tandis que la cellule sous test est noyée
dans le c1utter. Cependant, dans le cas de présence des cibles
interférentes ou lorsqu'un un bord de c1utter est présent, alors
que la cellule sous test s'installe dans la région c1aire de la
fenêtre de référence, les
performances de détection du GO-CFAR se
dégradent significativement. Pour remédier à ce
problème le détecteur SO-CFAR (Smallest Of-CFAR) a
été proposé. L'utilisation du détecteur SO-CFAR,
fait apparaitre a la sortie de la sélection logique (Figure 2.4), le
minimum entre la somme des sorties des deux demies fenêtres A et B, et le
test statistique Wso est donné comme suit :
????SO = min(A, B)
2.3.2.3. OS-CFAR
Nous avons déjà vu que les performances du
détecteur CA-CFAR et de ses variantes se dégradent brusquement
dans les environnements nonhomogènes. La
non-homogénéité est causée essentiellement par la
présence des cibles interférentes dans quelques cellules de
référence ou bien par la présence d'un bord de clutter. La
technique d'estimation du niveau du clutter basée sur le classement
statistique a mené au développement du détecteur OS-CFAR
(Order Statistic-CFAR), qui sélectionne un seul échantillon
classé pour estimer le niveau du clutter dans la cellule sous test. Le
rôle majeur du détecteur OS-CFAR est de surmonter le
problème de l'effet de capture en éliminant les cellules qui
contiennent des cibles interférentes.

x1 xN/2
xN/2+1 xN
Algorithme de classement : ????1 < ????2 < ? < ????????
< ? < ????????

???????????? = ????????

????????????

H1
H0
Figure 2.5 : schéma synoptique du processeur OS-CFAR
La keme (k = 2×N
3 ) cellule classée représente l'échantillon
yk est choisi comme test statistique.
WOS = Xk
2.3.3. Les pertes CFAR
La détection CFAR entraine des pertes dues au fait que
les statistiques sont incomplètement déterminées par
rapport à l'utilisation du détecteur à seuil fixe, qui est
basé sur une connaissance exacte du niveau et des statistiques du bruit
et des interférences. Donc les pertes CFAR sont introduites par le fait
que l'estimation du niveau d'interférence dans les cellules de
référence est sujette à l'erreur aléatoire, qui
varie inversement au nombre de cellules. Le fait que l'estimation est
basée sur un nombre fini d'échantillons, elle fluctuera donc,
autour de la vraie valeur.
La perte CFAR est définie alors, par l'augmentation du
rapport signal à bruit nécessaire pour atteindre une
probabilité de détection donnée, relativement au rapport
signal à bruit donnant la même probabilité de
détection pour une valeur estimée ne variant pas (optimale).
D'un autre côté, si le nombre de cellules est
augmenté pour réduire cette perte le circuit ne pourra pas
répondre aux changements rapides des interférences, permettant
ainsi une augmentation du taux de fausse alarme. Aussi, l'augmentation du
nombre de cellules de référence mène à
l'accroissement de la probabilité qu'une cible adjacente apparaisse dans
les cellules de références et distorde le seuil.
2.4. Intégration binaire
L'aspect synchrone des impulsions radar permet d'introduire
une amélioration sur les performances de détection. Cette
amélioration est apportée par le fait qu'à
l'intérieur du lobe principal de l'antenne radar il peut y avoir
plusieurs impulsions synchrones retournées par la même cible
(entre 4 et 12), ce si est dû à l'angle d'ouverture du lobe
principal (environ 3°).
|
Rotation de
l'antenne
Cible
|
53
|
Figure 2.6 : passage du lobe principal d'une antenne radar sur
une cible
2.4.1. Configuration du détecteur binaire




Leme récurrence



M

0
1
Intégrateur binaire
1er récurrence 2eme récurrence
Détecteur 1
Détecteur 2
Détecteur L
Ø1 = 1 ???????? 0
Ø2 = 1 ???????? 0
ØL = 1 ???????? 0
Figure 2.7 : schémas synoptique du détecteur
binaire
Comme indiquer sur la figure 2.7 chaque récurrence est
synchronisée sur un détecteur de façon a ce qu'une cible
pourra être détecté simultanément
sur les différents détecteurs , et la sortie
(binaire « Øi = 1 ???????? 0x) de tous ces
détecteurs sont introduit dans un intégrateur
binaire.
2.4.2. Performances du détecteur binaire
Si on admet que les « détecteurs 1,2,..., L »
alignés parallèlement sont du même type, ils auront les
mêmes probabilités de détection et de fausse
alarme, qu'on notera respectivement ???????? et ???????? ????.
Ainsi à la sortie de l'intégrateur
binaire la probabilité de détection binaire
???????????????? devient d'après la loi binomiale :
???????????????? = ? ????????
???? ???? ???????????? (1 - ????????)????-???? (2.8)
????=????
Et la probabilité de fausse alarme binaire
???????????????????? devient de la même
manière :
???????????????????? = ? ????????
???? ???? ???????? ???????? (1 - ????????????)????-???? (2.9)
????=????
Le fait que la probabilité de détection sur une
seule récurrence (????????) est
proche de 1 et que la probabilité de fausse alarme sur une
seule récurrence
(????????????) est proche de 0, accroit les performances de
détections.
Dans le tableau 2.2 est illustré l'effet de la
détection binaire sur la probabilité de fausse alarme, ainsi que
sur la probabilité de détection. Les
probabilités sur une seule récurrence Pd et Pfa
sont choisis, a titre d'exemple
0,9 et 0,1 respectivement, ainsi le nombre de détecteurs
intégrer (L) est de 6.
Tableau 2.2 : Effet du détecteur binaire sur les
performances de détection
|
M=1 L=6
|
M=2 L=6
|
M=3 L=6
|
M=4 L=6
|
M=5 L=6
|
M=6 L=6
|
|
????????????????
|
1.0000
|
0.9999
|
0.9987
|
0.9842
|
0.8857
|
0.5314
|
|
????????????????????
|
0.4686
|
0.1143
|
0.0159
|
0.0013
|
5.5 10-5
|
10-6
|
D'après le tableau 2.2 il est claire que les valeurs M=4
et 5, apporte la meilleure amélioration des performances du
détecteur binaire (pour L=6).
2.5. La simulation « MONTE-CARLO »
Le score attendu dans un jeu de chance, peut être
estimé en faisant la moyenne des résultats d'un grand nombre
d'épreuves. Cette estimation est dite estimation par la méthode
de MONTE-CARLO.
La technique de simulation MONTE-CARLO est une méthode
numérique statistique souvent utilisée pour calculer des
intégrales difficiles à résoudre, ou bien pour confirmer
le calcul d'une intégrale complexe. Dans le domaine de détection
radar, cette technique est surtout un moyen de simulation simple utilisé
pour confirmer les résultats théorique des performances d'un
détecteur. Elle consiste à simuler un très grand nombre de
situations conforme aux fonctions de distribution établit (H0 et H1),
calculer la probabilité de détection par une procédure de
comptage, et comparer les résultats théoriques aux
résultats MONTE-CARLO.
2.6. Conclusion
La technique de la détection adaptative TFAC a
contribué énormément à l'évolution des
radars. L'originalité de ce détecteur consiste à proposer
une nouvelle détection basée sur un seuil adaptatif CFAR, en
remplacement de la détection classique à seuil fixe. Depuis son
introduction, cette technique à ouvert la voie à un grand nombre
de scientifiques à travers le monde. Et plusieurs travaux basés
sur le seuil adaptatif on été publiés et continuent
toujours à être publiés.
CHAPITRE 3
DETECTION SSR/CFAR
3.1. Introduction
Le détecteur utilisé pour les récepteurs
du radar secondaire est un détecteur à seuil fixe, car, la
puissance du signal réponse est largement plus grande que celle du bruit
thermique. Cependant l'utilisation croissante du radar secondaire a introduit
un nouveau parasite, qui est le FRUIT (False Replies Unsynchronized In Time),
ce parasite devient très gênant aux alentours des zones à
haut trafic aérien, où il ya une implantation importante de
radars secondaires. Ce signal parasite est éliminé, alors, par un
traitement post-détection (défruiter) décrit dans le
chapitre I.
Dans notre mémoire nous allons étudier la
détection adaptative CFAR appliquée au radar secondaire pour
l'élimination du FRUIT. Pour cela nous allons introduire un traitement
CFAR en poste détection quadratique.
3.2. Modélisation mathématique des
signaux parasites
Nous allons dans ce qui suit, modéliser la distribution du
signal à l'entrée du récepteur et déduire la
distribution à la sortie du détecteur quadratique.
6in (IIIt)
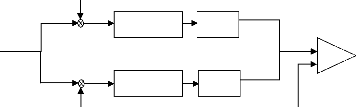
E
Filtrage et
échantillonnage
Filtrage et
échantillonnage
( . ) 2
( . ) 2
x
&os (IIIt) Seuil de détection
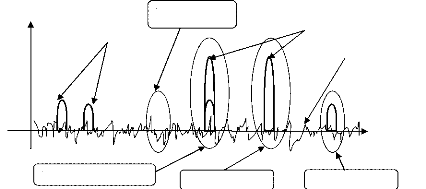
E FRUIT
(F) Bruit thermique
(N)
Bruit +FRUIT+signal
Bruit seulement
Bruit + signal
Signal utile
(Su)
Bruit + FRUIT
Temps
3.2.1. Le signal à l'entrée du détecteur
quadratique (E)
Figure 3.2 : le signal à l'entrer du récepteur
Pour cette étude nous allons supposer que le signal
d'entrée est composé de trois types de signaux :
> Le signal utile : signal émis par les
transpondeurs en réponse à une demande d'identification, la
caractéristique principale de ce signal est qu'il apparait de
façon synchrone pendant le passage du lobe principale sur la cible, il
doit être détecté. Sa distribution sera supposé
gaussienne centrée
de moyenne nulle et d'écart type ós,
sa fonction de distribution est ????(????):
|
1
????
????????v2????
|
-????2
|
|
????(????) =
|
2????????2
|
> Le FRUIT : signal émis par les
transpondeurs sans demande d'identification (réponse à un autre
radar SSR), ce signal ne doit pas être détecté, sa
distribution sera supposé gaussienne centrée de moyenne nulle et
d'écart type óF.
|
1
????
????????v2????
|
-????2
|
|
????(????) =
|
2????????2
|
> Le bruit thermique : gaussien de moyenne nulle et
d'écart type óN.
|
1
????
????????v2????
|
-????2
|
|
????(????) =
|
2????????2
|
Le FRUIT et le bruit thermique sont les deux principaux
signaux parasites qui nuisent à la détection ; le bruit thermique
est présent tout le temps, alors que le FRUIT est
considéré comme des impulsions éparpillées dans le
temps avec une probabilité d'apparition « ????0 ». Cette
probabilité est évaluée, près des aéroports
et des zones à haut trafic aérien, entre 0,02 et 0,05 (0,02<
????0<0,05).
3.2.2. Evaluation de la probabilité d'apparition du
FRUIT« ????0 »
La probabilité d'apparition du FRUIT « ????0
» a été évaluée par des mesures faites
à partir d'un récepteur radar secondaire embarqué à
seuil de détection réglable [7]. Les résultats des mesures
réalisées auprès du « Los Angeles International
Airport (LAX) » sont schématisés sur la Figure (3.3).
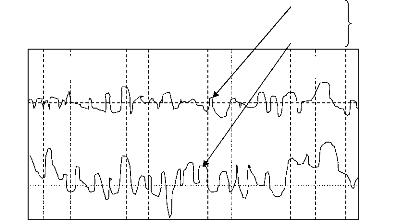
- 80 dBm
-70 dBm
LAX VAN NUYS
MIDWAY SEAL
Beach
Fréquence d'apparition du FRUIT
10000
1000
Seuil du détecteur
13 :40 13 :45 13 :50 13 :55 14 :00
TEMPS
Figure 3.3 : feuille de mesure du FRUIT
dans la
région de LOS ANGELES [7]
On remarque sur la feuille de mesure que pour un seuil de
détection minimal (-80 dBm) la fréquence moyenne d'apparition du
FRUIT est de 10.000 réponses par seconde.
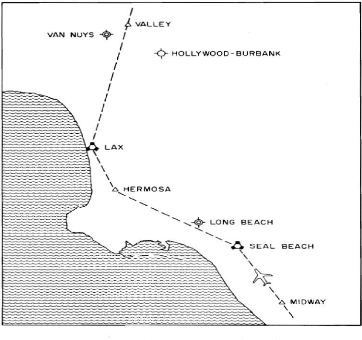
Figure 3.4 : Trajet sur lequel la mesure de la
fréquence
moyenne d'apparition du FRUIT à été
établis [7]
Si on part du fait que chaque réponse contient entre 4
et 10 impulsions et que chaque impulsion a une durée de (0,5us), alors
le temps d'apparition (ta) du FRUIT sur une seconde est compris entre
tamin=4×0,5×10.000=20.000 (us) et tamax=10×0,5×10.000=
50.000 (us).
Ainsi la probabilité d'apparition (pa ou ????0 ) est
comprise entre pamin=tamin
1????
et pamax=tamax
1???? .
3.2.3. Le signal à la sortie du détecteur
quadratique (x)
3.2.3.1. Les signaux composites
Avec les trois types de signaux supposés en haut, on
peut avoir à l'entrée du détecteur quadratique quatre (4)
cas possible de signaux composites [13]:
> Bruit seulement.
> Bruit + FRUIT.
> Bruit + signal utile.
> Bruit + signal utile + FRUIT.
Par la suite, on aura à la sortie du détecteur
quadratique, selon le cas, les
|
distributions exponentielles suivantes [15]:
> Bruit seulement :
> Bruit + FRUIT :
> Bruit + signal utile :
> Bruit + signal utile + FRUIT :
|
????1(????)
????2(????)
????3(????)
????4(????)
|
=
=
=
=
|
-????
|
|
|
1
2????????2
|
|
2???????? 2 ????
-????
|
|
1
2(????????2+????????2)
|
|
2(????????2+????????2) ????
-????
|
|
1
2(????????2+????????2)
|
|
2(????????2+????????2) ????
-????
|
|
1
2(???????? 2+????????
|
2+???????? 2)
|
|
2(????????2+????????2+????????2) ????
|
En normalisant par rapport au bruit:
- 2????????2 = ????.
- FNR = r = ????????2/????????2 rapport
FRUIT a bruit.
- SNR = s = ????????2/????????2 rapport
signal a bruit.
|
Alors :
> > > >
|
????1(????)=
????2(????) =
????3(????) =
????4(????) =
|
-????
1
|
-????
|
|
????????
????
1
|
|
???? ????(1+????)
-????
|
|
????(1+????)
1
|
|
???? ????(1+????)
-????
|
|
????(1+????)
1
|
|
????(1+????+????)
|
|
????(1+????+????) ????
|
|
?
?
?
?
?
|
????????(????|????0)
|
=
|
(1
|
-
|
????0)
|
1 -???? 1 -????
|
|
-????
|
|
???? ????(1+????)
|
|
???? ???? + ????0 ????(1 + ????) ????
1 -???? 1
|
|
????(1+????) +
|
???? ????(1+????+????)
|
|
????(1 + ????) ???? ????0
????(1 + ????
|
+ ????)
|
????????(????|????1)
=
(1
-
????0)
... (3.1)
3.2.3.2. Critère de détection
Deux hypothèses (H1, H0) permettent de contrôler
le bon déroulement de la prise de décision ; présence ou
non présence d'une cible. Sous l'hypothèse H1 la cible est
présente et elle est détectée .Cette hypothèse va
nous permettre de calculer la probabilité de détection, par
contre, Sous l'hypothèse H0 la cible n'est pas présente mais il y
a détection. Cette hypothèse va nous permettre de calculer la
probabilité de fausse alarme.
Dans le cas où il n ya pas présence de signal
utile (hypothèse H0), la fonction de distribution du signal a la sortie
du détecteur quadratique, s'écrit en
fonction de ????1(????) ???????? ???????? ????2(????) ?
????????(????|????0) = ???? ????????????????????????????
[????1(????), ????2(????)].
Dans le cas de la présence du signal utile
(hypothèse H1), la fonction de distribution du signal à la sortie
du détecteur quadratique, s'écrit en fonction de
????3(????) ???????? ???????? ????4(????) ?
????????(????|????1) = ???? ????????????????????????????
[????3(????), ????4(????)].
???????? (???? |????0) = ????????????????????????????????
[????1(????), ????2(????)]
On aura le couple ~
????????(????|????1) = ????
???????????????????????????? [????3(????), ????4(????)]
En appliquant la loi de la probabilité totale [11, 12,
13], on obtient le couple définissant la fonction de distribution du
signal reçu à la sortie du détecteur quadratique pour les
hypothèses H0 et H1 :
3.3. Détection a seuil fixe pour une seule
récurrence
Ce type de détecteur « classique »,
utilisé dans les systèmes de transmission impulsionnelles (exp :
radar secondaire) où le parasite est constitué essentiellement
par le Bruit thermique du récepteur. La puissance du Bruit thermique est
calculée à partir du facteur de bruit du récepteur.
La fixation « étudiée » de la valeur
du seuil de détection assure une probabilité de fausse alarme
minime pour une probabilité de détection proche de « un
».
3.3.1. Probabilité de détection

???????? = ~ ????????(x|H1)????????
????

???????? = ~(1 - ????0)
????
1 -???? 1 -????

????????(1+????+) ????????
????(1 + ????) ????0 ????(1 + ???? + ????)
????????(1+????) +
???????? = (1 - ????0)???? ????(1+????) + ????0????
????(1+????+????)
... (3.2)
3.3.2. Probabilité de fausse alarme

???????????? = ~ ????????(????|????0)????????
????

-???? 1 -????
???????????? = ~(1 - ????0) 1 ???? ???? ???? + ????0
????(1+????) ????????
-????
???????????? = (1 - ????0)????
-????
???? + ????0????
????(1+????)
????
... (3.3)
????(1 + ????) ????
3.3.3. Performance du détecteur à seuil
fixe
Avant de tracer les graphes de performances, il convient
d'estimer les puissances du bruit, du signal utile et du FRUIT.
> Calcul de la puissance du bruit: (P « bruit
»)
P « bruit »=6N2 = A/2 = K ×
T × OF × Fb
Avec :
· Facteur de bruit Fb = 12 dB = 15.8489
· La bande passante doit permettre le passage sans
distorsion d'un front
montant de l'impulsion de 0.1us : donc OF = 10MHz
· T=300°k
· K constantes de Boltzmann=1.38 × 10-23
P « bruit » = 1.38 × 10-23 × 300
× (10 × 106) × 15.8489 [W]
P « bruit » = 6.5614446 × 10-23 [W] = -
91.8300 dBm
> Estimation de la puissance des impulsions de
réponses
Dans le paragraphe (1.2.1.6.1.2) du chapitre 1 nous avons
estimé la puissance du signal utile entre -40dBm et -76dBm, selon la
distance qui sépare le transpondeur du radar SSR.
-76dBm < P« signal utile» < -40dBm
soit
Ce qui donne : 50 < s < 150 000 --> 17dB< s
<50dB
> Estimation de la puissance du FRUIT L'estimation de
la puissance du FRUIT est équivalente à celle du signal
utile.
-76dBm < P« FRUIT» < -40dBm
soit
Ce qui donne : 50 < r < 150 000 --p 17dB< r <50dB
Pour avoir une étude comparative convaincante, nous allons
prendre le cas le plus défavorable à la détection :
s =17dB, r = 50dB et e0=0.05.
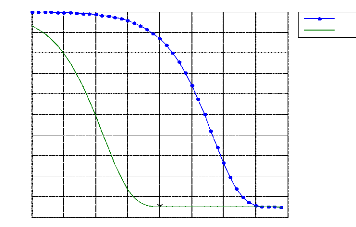
Pd et pfa
detecteur a seuil fixe pour une seule récurrence, s=17dB
r=50dB
-100 -95 -90 -85 -80 -75 -70 -65 -60
Pd Pfa
? Pd=0.8684
e0=0,05
pfa=0,05
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
seuil de detection (dBm)
Figure 3.5 : Pd et Pf a pour une détection à une
seule récurrence, en
fonction du seuil de détection
Nous constatons que le choix d'un seuil de détection
égale à (-80 dBm) garantit une probabilité de
détection (Pd =0,87) pour une probabilité de fausse
alarme égale a (Pfa=0,05). La valeur de cette Pfa, qui
correspond à la
probabilité d'apparition du FRUIT (e0), est trop
élevée, elle peut être améliorée par une
intégration binaire.
3.4. Détection binaire a seuil fixe
Au passage du lobe principal du radar secondaire, sur une
cible celle-ci répond aux interrogations de façon synchrone.
Ainsi selon la vitesse de rotation de l'antenne, la largeur du lobe principale
et la fréquence de répétition des interrogations, la cible
pourra être touchée par un nombre « L » de coup au
but.
6<L<12
La détection synchrone de ces impulsions de
réponses va permettre, comme nous allons voire, d'améliorer la
probabilité de détection.
Nous proposons pour les applications numérique, les
valeurs L=6 et M=4 comme critère de détection binaire :
Seuil de détection
????
~Ø????
????=1
0
1

Ø1 = 1 ???????? 0
Ø2 = 1 ???????? 0

Ø????

SLD 1

SLD 2

SLD L
M
Figure 3.6 : schémas synoptique du détecteur
binaire à seuil
fixe
3.4.1. Probabilité de détection binaire
La loi de la probabilité de détection binaire
est définie par la somme des lois binomiales de détection de M,
M+1, M+2, ..., L impulsions sur les L récurrences [22].
????
???????????????? = ~ ???????????? ???????????? (1 -
????????)????-????
????=????
... (3.4)
|
|
|
|
|
|
|
-????
|
-????
|
|
????
|
|
???????? ????
|
×
|
~(1
|
-
|
????0)???? ????(1+????)
|
~????
+ ????0???? ????(1+????+????)
|
|
???????????????? =
|
~
|
|
|
|
|
|
|
|
|
????=????
|
|
|
|
|
|
-????
|
-????
|
|
????0)????????(1+????)
|
~????-????
- ????0????????(1+????+????)
|
|
|
×
|
1
~
|
-
|
(1
|
-
|
|
|
|
|
|
|
|
|
|
3.4.2. Probabilité de fausse alarme binaire
Il est plus simple d'avoir la formule de la
????????????????????en annulant « s » dans la formule (3.4).
... (3.5)
|
|
|
|
|
-???? -????
|
|
|
????
|
???????? ????
|
×
|
~????
~(1 - ????0)???? ???? + ????0???? ????(1+????)
|
|
????????????????????
|
=
|
~
|
|
|
|
|
|
????=????
|
|
|
-???? -????
|
|
~????-????
(1 - ????0)???? ???? -
????0????????(1+????)
|
|
|
|
× ~1
|
-
|
3.4.3. Performance du détecteur binaire à
seuil fixe
Les paramètres du détecteur binaire utilisé
sont M=4 L=6 :
detecteur binaire a seuil fixe , s=17dB r=50dB
PdBI et
pfaBI
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
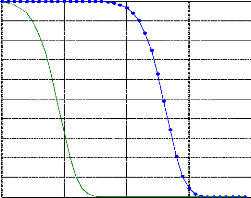
pfa=8.96e-5
? Pd=0.97
e0=0,05
PdBI PfaBI

-100 -90 -80 -70 -60
seuil de detection (dBm)
Figure 3.7 : ????????????????et ???????????????????? pour une
détection binaire en fonction du seuil de
L'intégrateur binaire améliore
considérablement les performances de détection (Figure 3.7). Le
choix d'un seuil de détection égale a (-80 dBm) garantit une
probabilité de détection (????????????????=0,97) pour
une probabilité de fausse
alarme égale à
(????????????????????=8,96 × 10-5). Cette
???????????????????? sera encore améliorée par la
technique MONOPULSE et la technique du niveau de confiance
(chapitre 1).
3.5. Détection CA-CFAR: (cell averaging
CFAR)
L'objectif attendu à partir de cette partie du chapitre
consiste en l'amélioration des performances du système SSR, par
l'utilisation de la technique de détection adaptative à taux de
fausse alarme constant (CFAR).
Nous allons commencer par le détecteur CA-CFAR. Les
distributions dans la cellule sous test, pour les hypothèses H0 et H1,
sont définies par le couple suivant :
-???? -????
1
????1
????????(????|????0) = (1 - ????0) 1 ????1 ????
? ???? + ????0
avec~????1 = ????(1 + ????) ????2 = ????(1 +
????) ????3 = ????(1 + ???? + ????)
???? ????
?
?

-???? -????
? 1
????????(????|????1) = (1 - ????0) 1
?????2????????2
+
????0????????3????3
3.5.1. Probabilité de détection
D'après l'expression (2.5) du chapitre 2, la
probabilité de détection s'écrit comme suit:
|
-????????
???????? = ????[?wfx(????|????1)????????] = ????[(1 -
????0)???? ????2 + ????0????
|
-????????
????3 ]
|
-???????? -????????
???????? = (1 - ????0)????[???? ????2 ] + ????0????[???? ????3 ]
... (3.6)
Nous savons aussi que la fonction génératrice des
moments MW(P)
d'une variable aléatoire W est :
MW(P) = ????[????-????????] ... (3.7)
De (3.6) et (3.7) on peut écrire :
|
???? ????
???????? = (1 -
????0)????????(????2)+????0????????(????3)
|
... (3.8)
|
Dans ce type de CFAR (CA-CFAR) le parasite est estimé par
la somme des cellules de références.
????
???? = ~ ????????
Où « N » est le nombre de cellules de
référence.
La fonction de distribution d'une somme de variables
aléatoires est définie par la convolution des fonctions de
distributions de toutes ces variables aléatoire :
????????(????) = ????????(????1|????0) *
????????(????2|????0) * ... * ????????(????????|????0)
Introduisant maintenant la transformée de Laplace de part
et d'autre :
????{ ????????(????)} = ????{????????(????1|????0) *
????????(????2|????0) * ... *
????????(????????|????0)}
? ????{ ????????(????)} = ????{????????(????1|????0)}
× ????{????????(????2|????0)} × ... ×
????{????????(????????|????0)}
????
-???? 1 -????
? ????{ ????????(????)} = ???? ~~(1 - ????0) ???? 1 ???? ???? +
????0 ????1 ???? ????1~ ~
~????
????{ ????????(????)} = ~(1 - ????0) 1 + ????????
1 1

+ ????01 + ????
Puisque la fonction de distribution ????????(????) est
définie sur [0 °°[, alors la
fonction de distribution ????????(????) est définie
aussi sur [0 co[ et la transformée de
Laplace de celle-ci est égale à sa fonction
génératrice des moments [25]:
1 ????
... (3.9)
????{ ????????(????)} = MW(P)
|
????
1
MW(P) = ~(1 - ????0) 1
1 + ???????? + ????0 1 + ????1 ????~
|
Des équations (3.8) et (3.9) on déduit que :
????
1 1
???????? = (1 - ????0) × (1 - ????0) ???? + ????0
????~
1 + ????2 1 + ????1 ????2
|
1 1
+ ????0 × (1 - ????0) ???? + ????0 ????
1 + ????3 1 + ????1 ????3
|
????
~
|
1
???????? = (1 - ????0) ~(1 - ????0) 1 ???? + ????0 1 +
(1 + ????)????
1 +
1
1
+????0 ~(1 - ????0) + ????0
1 + ???? 1 + 1 + ????
1 + ???? + ???? ????
1 + ???? + ????
????
~
1 +

????
~
... (3.10)
3.5.2. Probabilité de fausse alarme
La Probabilité de fausse alarme peut être
déduite en mettant « s=0 » dans l'expression (3.10) :
1 1 ~????
???????????? = (1 - ????0) ~(1 - ????0) 1 + ???? + ????0 1 + (1 +
????)????
????
1
+????0 ~(1 - ????0) 1 + ????0
1 + ???? 1 + ????~

... (3.11)
3.5.3. Estimation adaptative des paramètres du FRUIT
(å0, r)
Nous constatons que l'équation (3.11) prend la forme
suivante :
F (T, r,å0) =0.
Où « å0 et r » sont respectivement la
fréquence d'apparition des impulsions FRUIT et le rapport FRUIT sur
bruit (FNR), ces deux paramètres seront évalués pour
chaque cellule test à partir de la fenêtre de
référence correspondante. Cette évaluation sera faite soit
par l'algorithme de censures automatiques [9,13 et 14], ou bien par une autre
méthode plus simple et relativement rapide que nous allons proposer.
3.5.3.1. L'algorithme de censure automatique
Les echantillons de la fentitre de reference xj, (j = 1, 2,...,
N) sont d'abord classes par ordre croissant pour former la statistique d'ordre
suivante:
y1 <y2 <............<yN--1 <yN
Nous allons ensuite chercher le keme echantillon ( yk
) à partir du quel
l'algorithme de censure automatique detecte la presence d'une
impulsion FRUIT, ainsi tous les echantillons restants contiennent
indubitablement du FRUIT. Cet algorithme fonctionne de la manière
suivante :
· Chaque element de la statistique d'ordre y~' = ( y1, y2,
... , yN ) est compare
à un seuil adaptatif d'après la règle:
yi+1 Si Ti, i = 1,2, .........,N ... (3.12)
Avec :
- Si = Zip =1 yP
- Les constantes Ti sont determinees d'après [14]
à partir de la
probabilite de fausse censure ( exp : PfC =
10--4 ).
N 1
PfC = (i ) [1+Ti(N--i)]i ...
|
(3.13)
|
|
· La procedure recursive sera arrtitee au
keme echantillon, lorsque la condition (3.12) devient vraie. Les
cellules de la fentitre reference seront ainsi divisees par rapport à
l'echantillon k en deux parties: La première partie de gauche contient
du bruit seulement, alors que la deuxième partie contient le FRUIT plus
le bruit. Les paramètres de l'interference (FRUIT) seront estimes en
utilisant cette deuxième partie [9].
· En fin, l'evaluation de la puissance (Fp) et
de la probabilite d'apparence (Ff) du FRUIT peuvent titres evaluees comme suit
[9]:
Y(N+k+1)/2
1 si N -- k est impaire
> Fp = (yN+k+yN+k+2)
2 2 2 si N -- k est paire
La puissance du FRUIT etant evaluee, le rapport FRUIT sur bruit
sera
calcule par : r = FNR = Fëp
> Ff = å0 = (N -- k)/N
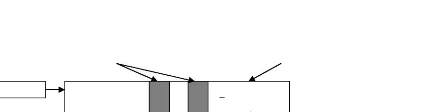
Cellules de
garde
Cellules de
référence
71
|
????1 ...
|
... ... ????????/2
|
|
H1
|
|
xr2+1~ ... ...
|
... ????????
|
STD

Cellules
sous test
Classement par ordre croissant :
????1 <????2 <...... ......<????????-1 <????????

Algorithme de censure automatique :
Calcule de k



Estimation de r (FNR) et de ????0
Figure 3.8 : le schéma synoptique de l'estimateur par la
censure automatique
3.5.3.2. Méthode proposé (censure
directe)
L'algorithme de censure automatique repose sur un dispositif qui
détecte
le FRUIT et évalue les deux paramètres le
caractérisant (????0 ???????? ????) par rapport à
un seuil adaptatif évalué par un CA-CFAR estimant
le bruit à partir des cellules de gauche de la statistique d'ordre.
Puisque le bruit dans le radar secondaire est essentiellement
thermique avec une fonction de distribution connue, nous pouvons fixer un seuil
de détection pour toutes les cellules de références
à fin d'y détecté l'existence d'impulsions FRUIT.
On aura donc pour chaque cellule deux hypothèses : H0
pour le cas de présence du bruit seulement et H1 pour le cas de
présence du bruit plus le FRUIT.
-????????
???????????? (????????|????0) = 1 ????
? ???? ????
?
?
?
?
-????????
????(1+????)
???????????? (????????|????1) = 1
????(1+????) ????
... (3.14)
Le seuil de détection sera choisi pour une
probabilité de fausse censure minime.
-x???? -????
8
???????????? = ? ???????????? (xx|H0)???????????? = ? 1
8???????? ???? ???????????? = ???? ????
???? ????
|
8
???????? = ? ???????????? (xx|H1)???????????? = ? 1
8
???? ????????(1+????)????
|
-x????
|
|
-????
|
|
????(1+????) ???????????? = ????
|
????(1+????)
|
Avec ???? : le seuil de détection
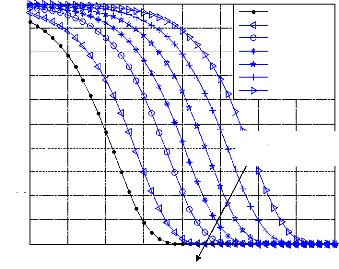
1
5 × 10-4
0.3
0.2
0.1
0
-100 -95 -90 -85 -80 -75 -70 -65 -60
seuil de censure directe (dBm)
Pc et pfc
0.5
0.4
0.9
0.8
0.7
0.6
pfc
pc FNR =0dB pc FNR =6dB pc FNR =9dB pc FNR =12dB pc FNR =15dB
pc FNR =18dB
Figure 3.9 : La probabilité de censure et de fausse
censure en
fonction du seuil de détection
Nous remarquons sur la Figure 3.9 que pour un seuil de
détection de -
80dBm la probabilité de fausse censure est de 5 ×
10-4, alors que la probabilité
de censure dépend du niveau de puissance du FRUIT, et elle
n'est significative que pour FNR >9dB.
Après détection ou non détection du FRUIT
dans chaque cellule de la fenêtre de référence, nous
pouvons estimer la fréquence d'apparition des impulsions FRUIT et
ensuite le rapport FRUIT sur bruit (FNR ou r), à partir du schéma
proposé dans la Figure 3.10.
3.5.3.2.1. Estimation de la probabilité d'apparition
des impulsions FRUIT
Les sorties binaire Qi (Figure 3.10) des détecteurs de
chaque cellule de la fenêtre de référence seront
sommées et divisées par le nombre de cellule de
références (N), ceci donnera une bonne estimation de la
probabilité d'apparition
du FRUIT « ????0 ».
å0 * = ? Qi
N ... (3.15)
Avec å0 * : probabilité d'apparitions du FRUIT
estimée.
Pour que le schéma synoptique de l'estimateur par la
censure directe soit plus lisible nous avons choisi le nombre de cellule de
référence N=6 à titre d'exemple:
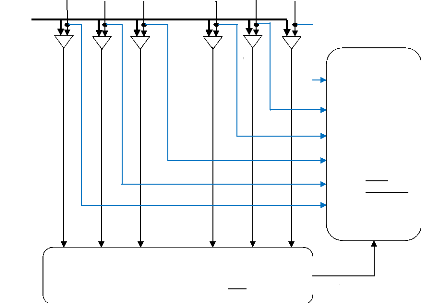
-80dBm
Q1
0
1 0 1 0 1
Calcul de la probabilité d'apparition du
FRUIT « ????0 >> ????0 * = ?????????
????
Q2 Q3
Q4
0 1
Q5 Q6
0 1 0 1
Estimation du
rapport FRUIT
sur bruit « FNR
>>
????0 *
r* =
? xi
N ? ë
å0 * × ë
????1 ... ... ????2 ... ... ????3
|
|
|
H1
|
|
|
????4 ... ... ????5 ... ... ????6
|
3.5.3.2.2. Estimation du rapport FRUIT sur bruit (FNR)
La moyenne statistique des « N » cellules de
référence correspond à la moyenne de la variable
aléatoire définit par la fonction de distribution
« ???????? (????|????0) » de l'expression (3.1).cette
moyenne peut être évaluée par
l'estimation :
-???? -????
E [ ???????? (????|????0) ]= ????0 × E [ ????(11+????) ????
????(1+????) ] + (1 - ????0) × E [1???? ???? ???? ]
= ????0 × ???? × (1 + ????) + (1 - ????0) ×
????
On aura donc :
? ????????
???????????? = ????= ????0 × ???? × (1 + ????) + (1 -
????0) × ????
La probabilité d'apparitions du FRUIT étant
évaluée par l'expression (3.15), la valeur de « r »
(FNR) pourra ainsi être évaluée par l'expression:
|
r* =
|
?xi
-ë
N
å0*×ë
|
...
|
(3.16)
|
3.5.3.2.3. Performance de la censure directe
Pour tester la performance de l'estimateur proposé nous
avons généré un signal contenant du bruit dont la fonction
de distribution est exponentielle (en
amont du détecteur quadratique) et dont la moyenne est
???? (???? = 1.3123 ×
10 -9) , et des impulsions d'interférences
avec une probabilité d'apparition
poissonnienne « ????0 »
et une distribution en amplitude exponentielle dont la
moyenne est ???? × (1 + ????).
Pour r=50dB et ????0 = 0.05 la forme du signal simulé est
représenté sur la
Figure 3.11 :
Avant d'appliquer l'estimation par censure directe sur ce
signal, il faut mentionner que les paramètres du FRUIT qu'ont doit
estimer à partir des cellules de références, varient
lentement d'une cellule test à la cellule test adjacente, puisque pour
deux cellules tests adjacentes les fenêtres de référence
correspondantes ne diffèrent que de deux cellules (les
extrémités de la fenêtre de référence).
x 10-7 signal simulé e0=0.05 / r=50dB
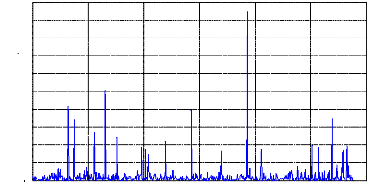
amplitude
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
0 100 200 300 400 500 600
cellule de refference
Figure 3.11 : signal simulé avec ????0 = 0.05 et
r=50dB
Ainsi on a simulé pour chaque cellule test des
paramètres FRUIT différents, mais qui varient lentement d'une
cellule à l'autre (Figure 3.12).
x 105 simulation du FNR autour de chaque cellule
test
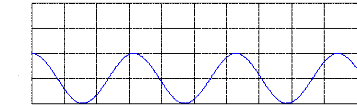
FNR
0.5
1.5
2
0
1
0 100 200 300 400 500 600 700 800 900 1000
0.1
0.05
0
probabilite d apparition du FRUIT
cellule sous test
simulation de e0 autour de chaque cellule test
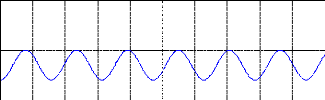
0 100 200 300 400 500 600 700 800 900 1000
cellule sous test
Figure 3.12 : simulation de ????0 et du FNR pour 1000 cellules
test
x 105 estimation du FNR autour de chaque cellule
test
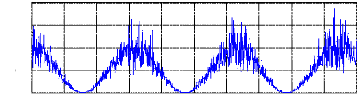
FNR
0.5
1.5
2
0
1
0 100 200 300 400 500 600 700 800 900 1000
0.1
0.05
0
probabilite d apparition du FRUIT
cellule sous test
estimation de e0 autour de chaque cellule test
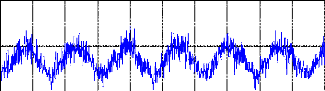
0 100 200 300 400 500 600 700 800 900 1000
cellule sous test
Figure 3.13 : estimation de ????0 et du FNR pour 1000 cellules
test
adjacentes par la censure directe (N=600)
x 105 estimation du FNR autour de chaque cellule test
aprés integration
FNR
0.5
1.5
2
0
1
0 100 200 300 400 500 600 700 800 900 1000
cellule sous test
0.1
0.05
0
probabilite d apparition du FRUIT
estimation de e0 autour de chaque cellule test aprés
integration
0 100 200 300 400 500 600 700 800 900 1000
cellule sous test
Figure 3.14: estimation de ????0 et du FNR pour
1000
cellules test adjacentes (N=6000)
L'application de la censure directe nous donne une estimation
satisfaisante avec une erreur (Figure 3.13), due au fait que le nombre de
cellules de référence n'est pas assez représentatif. Nous
pouvons diminuer cette erreur par une fenêtre de référence
plus large, Nous constatons une nette amélioration de l'estimation
(Figure 3.14) qui prend des valeurs très proches des valeurs
simulées (Figure 3.12). Cependant des valeurs faibles du FNR et de e0
seront mal estimés, car dans ce cas les impulsions FRUIT seront
noyées dans le bruit.
3.5.4. Performance du CA-CFAR
L'étude de performance du CA-CFAR se fait en trois
étapes :
a) Fixer une probabilité de fausse alarme,
désirée.
b) Calculer le facteur d'échelle « T »
nécessaire.
c) Déduire la probabilité de détection.
Application
a) On fixe Pf a =10-6.
b) Le facteur d'échelle « T » sera
calculé par la résolution de l'équation (3.11). Cette
équation est non linéaire, elle peut être résolue
par la méthode de dichotomie.
Nous allons nous intéresser pour le cas où les
valeurs « e0 et r », sont les plus défavorable à la
détection: r=50dB et e0 = 0,05.
c) Ont remplace T dans l'expression (3.10) et on calcule la
probabilité de détection pour différentes valeurs de
« s ».la Figure (3.15) représente la variation de la
probabilité de détection en fonction du rapport SNR, sachant que
r et e0 sont des constantes, respectivement égale à 50dB et
0,05.
Pd en fonction du rapport SNR avec une Pfa=1e-6
Pd
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
Pd=0.008 / SNR=17
CACFAR / e0=.05 /
FNR=50
dB
0 20 40 60 80 100 120
SNR dB
Figure 3.15 : la probabilité de détection du
CA-CFAR en fonction
du SNR pour r=50dB , ????0 = 0,05,
N=16
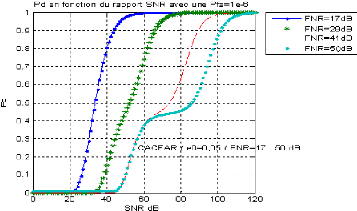
Figure 3.16 : la probabilité de détection du
CA-CFAR en fonction du
SNR pour ????0 =0,05, r=17...50dB et
N=16.
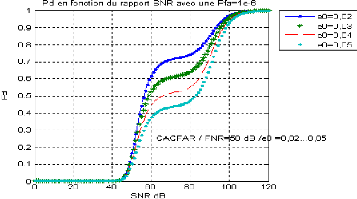
Figure 3.17 : la probabilité de détection du
CA-CFAR en fonction du
SNR pour r=50dB et ????0 = 0,02...0,05
et N=16.
Sur la Figure (3.15) on remarque que la probabilité de
détection est très faible pour un rapport SNR =17dB, et qu'elle
ne devient significatif que pour SNR>100dB. Sur les figures (3.16) et (3.17)
nous analysons le comportement de la courbe « ????????=fonction(SNR)
» en variant ????0 et r.
3.6. Détection CA-CFAR-BI
En fonction de l'angle d'ouverture à -3dB (environ
2,8°), de la vitesse de rotation de l'antenne et de la fréquence
d'interrogation, un avion peut recevoir un nombre « L»
d'interrogation (coup au but) et répondre « M » fois.
Nous proposons, le «CA-CFAR-BI » (cell averaging -
CFAR - binary integration), qui est une intégration binaire du
détecteur CA-CFAR. Comme nous l'avons fait pour le détecteur
binaire à seuil fixe, nous choisissons les valeurs L=6 et M=4 comme
critère de détection binaire :
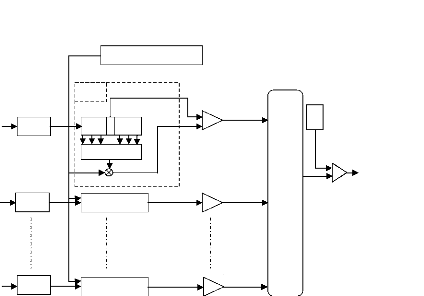
80
Facteur d'échelle
SLD 2
SLD L
0
M
CFAR 1
CFAR 2
CFAR L
????
Ø1
Ø2
Ø????
SLD 1
????
~ Ø????
????=1
Figure 3.18 : schémas synoptique du
détecteur
CA-CFAR-BI
3.6.1. Probabilité de détection binaire
Pour déclarer la cible présente, on
détermine un nombre minimal « M » de détection sur
« L » récurrence, ainsi la loi de la probabilité de
détection binaire est égale à la somme des lois binomiales
de détection de M, M+1, M+2, ..., L impulsions sur L récurrences
[21].
????
???????????????? = ~ ???????? ???? ???????????? (1 -
????????)????-????
????=????
Sachant que « ????????» est la probabilité de
détection d'une impulsion par un
CA-CFAR, évaluée précédemment par
l'expression (3.10). On aura donc l'expression :
????????????????
|
????
? ????=????
|
????
????????
|
×
|
1
|
(1 -
+????0
- (1
-????0
|
????0) ~(1 -
~(1 - ????0)
- ????0) ~(1
~(1 - ????0)
|
???? ????
1 + 1
?
1+???????????? 1+(1+????)????????????~
|
????-????
?
?
?
|
... (3.17)
|
|
|
????0) ????0
|
|
1+????
???? ?
1 1
|
|
+ ????0
???????????? 1+ 1+????
?
1+ 1+????+????????????????~
|
|
1+????+????
????
- 1 1
1+???????????? 1+(1+????)????????????~
|
|
????0) + ????0
|
|
1+????
????
1 1
1+????+???? 1+????+????????????????~
|
|
+ ????0
???????????? 1+ 1+????
|
|
1+
|
3.6.2. Probabilité de fausse alarme binaire
La Probabilité de fausse alarme peut être
déduite en mettant « s=0 » dans l'expression (3.17) :
|
????????????????????
|
=
|
????
? ????=????
|
???????? ????
|
×
1 -
|
(1 - ????0) ~(1
+????0 ~(1
(1 - ????0) ~(1
-????0 ~(1 -
|
???? ????
- 1 1
+
~ ?
|
×
????-????
...
|
(3.18)
|
|
|
????0) ????0 1+(1+????)????????????
1+????????????
???? ?
1 1
|
|
- ????0) + ????0
1+???????????? 1+ ????????????~
?
|
|
1+????
????
- 1 1
~ ?
|
|
????0)
1+???????????? + ????0 1+(1+????)????????????
???? ?
1 1
|
|
????0) + ????0
1+???????????? 1+ ????????????~
?
|
|
1+????
|
3.6.3. Performance du CA-CFAR-BI
Nous procédons toujours par les trois étapes :
a) On fixe Pf aR BI =10-6.
b) Le facteur d'échelle « TBI» sera
calculé après résolution de l'équation (3.18), par
la méthode de dichotomie.
c) On remplace TBI dans l'expression (3.17) et on
calcule la probabilité de détection binaire PdRBI pour
différentes valeurs de s.
Pd en fonction du rapport SNR avec une Pfa=1e-6
Pd
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
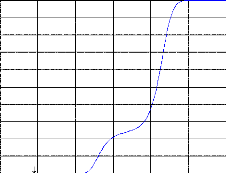
Pd=1e -6 / SNR=
CACFAR-BI / e0=.05 / FNR=50
M=4 L=6
17
0 20 40 60 80 100 120
SNR dB
Figure 3.19-a : la probabilité de détection du
CA-CFAR-BI en fonction du SNR pour r=50dB, e0 = 0,05, M=4, L=6 et
N=16.
Pd en fonction du rapport SNR avec une Pfa=1e-6
Pd
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
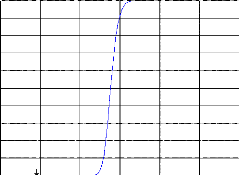
Pd=1e -6 / SNR=
CACFAR-BI / e0=.05
M=4 L=6
17
/ FNR=50
0 20 40 60 80 100 120
SNR dB
Figure 3.19-b : la probabilité de détection du
CA-CFAR-BI en fonction du SNR pour r=50dB, e0 = 0,05, M=4, L=6 et
N=96.
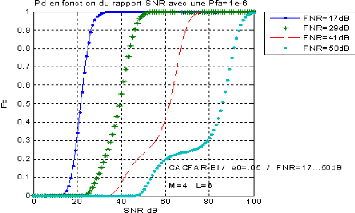
Figure 3.20 : la probabilité de détection du
CA-CFAR-BI en fonction du
SNR pour ????0 = 0,05, r=17...50dB, M=4, L=6
et N=16.
Pd en fonction du rapport SNR avec une Pfa=1e-6
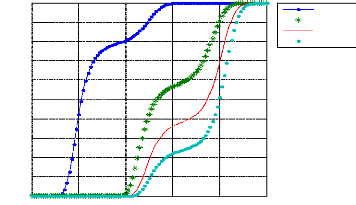
0.4
0.3
0.2
CACFAR-BI /FNR=50dB/ e0=0,02...0,05
0.1
M=4 L=6
0
0 20 40 60 80 100
Pd
0.5
1
0.9
0.8
0.7
0.6
e0=0,02 e0=0,03 e0=0,04 e0=0,05
SNR dB
Figure 3.21 : la probabilité de détection du
CA-CFAR-BI en fonction
du SNR pour r=50dB, ????0 =0,02... 0,05,
M=4, L=6 et N=16.
Sur les figures (3.20) et (3.21) nous Remarquons une nette
amélioration
de la probabilité de détection binaire
(????????????????) pour SNR > 90dB et une
diminution de cette probabilité (????????????????) pour
SNR < 90dB. La loi binomiale de
l'intégrateur binaire « ???????????????? = ?
????????
???? ???? ???????????? (1 - ????????)????-???? », permet
d'améliorer la
????=????probabilité de détection
binaire (????????????????) si la probabilité de détection
(????????) est
proche de (1) un, et la détériore dans le cas
contraire.
Sur les figures (3.19-a) et (3.19-b) nous remarquons une
nette
amélioration du graphe (????????) pour une fenêtre
de référence large, ce qui nous
pousse dans ce qui suit à estimer le FRUIT sur toutes les
récurrences pour chaque cellule test.
3.7. Détection CA-CFAR-BI-2D: (a deux
dimensions)
Le schéma du CA-CFAR-BI-2D s'apparente
étroitement au schéma du CA-CFAR-BI, la seule différence
est que l'estimation du signal parasite est faite à partir des cellules
de références de toutes les récurrences (L).
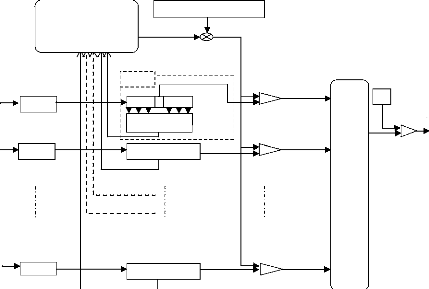
????
~ ????????
???? =1
Facteur d'échelle=fct
CA-CFAR 1
Ø1 =1 ???????? 0
1 ????????
SLD 1
????1 = ????????????????????(????????)
( ????)
Ø2 = 1 ???????? 0
SLD 2
CA-CFAR 2
????2
Ø???? = 1 ???????? 0
SLD L
CA-CFAR L
0
M
????
~Ø????
????=1
????????
3.7.1. Probabilité de détection du CA-CFAR-BI-2D
La formule de la probabilité de détection du
CA-CFAR-BI-2D est identique à la formule du CA-CFAR-BI, sauf que le
terme N est remplacé par le terme « NL » ; avec :
NL=N×L.
1
(1 - ????0) ~(1 - ????0) 1 + ????0
1 + ????2???? 1 + (1 + ????)????2????
1 + ????
1 1
+????0 ~(1 - ????0) + ????0
1 + ????2???? 1 + 1 + ????
1 + ???? + ???? 1 + ???? + ???? ????2????
???????? ~?
?
?
???????? ?
?
~
?
????
????
????????2???? = ~ ???????????? ×
????=????
|
????????
1 1
1 - (1 - ????0)~(1 - ????0) + ????0 ~ ?
1 + ????2????
? 1 + (1 + ????)????2???? ?
×
1 + ????
? ?
????????
? ?
? 1 1 ?
-????0 ~(1 - ????0) + ????0 ~
1 + ????2???? 1 + 1 + ????
1 + ???? + ???? ????2????
? 1 + ???? + ???? ?
|
????-????
... (3.19)
|
3.7.2. Probabilité de fausse alarme du CA-CFAR-BI-2D
La ???????????? peut être déduite en mettant «
s=0 » dans l'expression
(1 - ????0) ~(1 - ????0) 1
+????0 ~(1 - ????0) 1 + ????0
1+????2???? + ????0 1+(1+????)????2????~
1+????2???? 1+ ????2????~
1+???? ?
1
1 ???????? ?
???????? ?
????=????
× ?1 - (1 - ????0) ~(1 - ????0) 1
? 1+???? ?
-????0 ~(1 - ????0) 1 + ????0
1+????2???? 1+ ????2????~
1+????2???? + ????0 1+(1+????)????2????~ ? ???? ????
1 1 ???????? ?
???????? ???? ×
????
... (3.20)
????????????2???? = ?
????
????-????
(3.19) :
3.7.3. Performance du CA-CFAR-BI-2D
Nous procédons toujours par les trois étapes :
a) On fixe Pfa2D =10-6.
b) Le facteur d'échelle « T2D» sera
calculé après résolution de l'équation (3.20). par
la méthode de dichotomie.
c) On remplace T2D dans l'expression (3.19) et on
calcule la probabilité de détection PdR2D pour
différentes valeurs de s.
Pd en fonction du rapport SNR avec une Pfa=1e-6
Pd
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
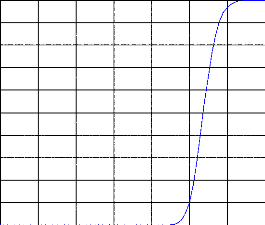
CACFAR-BI-2D-F1F2 / e0=.05
FNR=50(dB)
0 10 20 30 40 50 60 70
SNR (dB)
Figure 3.23 : la probabilité de détection du
CA-CFAR-BI-2D en
fonction du SNR pour r=50dB, e0 = 0,05, M=4 et
L=6 et N=16.
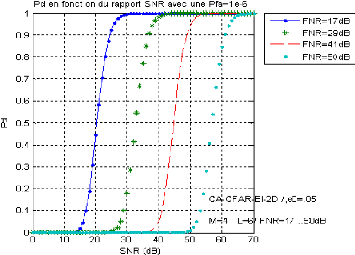
Figure 3.24 : la probabilité de détection du
CA-CFAR-BI-2D en
fonction du SNR pour ????0 = 0,05, r=17..50dB, M=4, L=6
et N=16.
Pd en fonction du rapport SNR avec une Pfa=1e-6
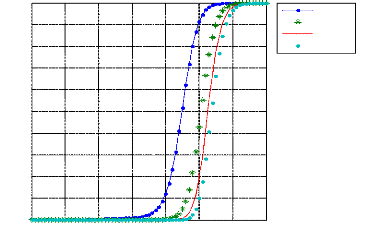
0.4
CACFAR-BI-2D-F1F2 / e0=0,02...0,05
0.3
FNR=50(dB)
0.2
M=4 L=6 N=16
0.1
0
0 10 20 30 40 50 60 70
Pd
0.5
1
0.9
0.8
0.7
0.6
e0=0,02 e0=0,03 e0=0,04 e0=0,05
SNR (dB)
En analysant les graphes 3.23, 3.24 et 3.25 nous arrivons
à la
conclusion que le CA-CFAR-BI-2D est le schéma le plus
performent de tous les schémas CFAR précédemment
étudiés . Ainsi pour une fenêtre de référence
très large, ce détecteur se rapproche du détecteur
optimale de Neyman-Pearson (Binaire a seuil fixe).
Les particularités du signal réponse (SSR)
suivantes vont nous permettre d'améliorer considérablement les
performances de détection :
> Les réponses SSR sont caractérisées par
les impulsions d'encadrement (F1 F2), qui sont séparées par 20,3
us
> Les impulsions d'encadrement (F1 F2) ont le même
niveau de puissance, aussi, ils ont le même niveau de puissance que les
impulsions de codages << A1 A2 A4 B1 B2 B4 C1 C4 D1 D2 D4».
3.8. Détection CA-CFAR-BI-2D de deux (2)
impulsions (F1 F2) simultanément
La présence d'une cible, inclut automatiquement la
présence des deux impulsions d'encadrement F1 et F2 espacées de
20,3us. Ainsi si on peut restreindre le critère de
détection, à une détection simultanée des deux
impulsions F1 et F2, on aura alors beaucoup moins de chance de faire une fausse
alarme, ceci améliorera automatiquement la probabilité de
détection.
Ce critère de détection peut être
réalisé en intégrant deux CA-CFAR-BI2D en
série, dont les cellules sous test sont reliées à une
porte AND (après intégration binaire). La sortie de cette porte
indique la présence ou la nonprésence d'une réponse SSR.
Cette détection pourra en suite, enclencher la lecture des cellules qui
correspondent à la position des impulsions de codage << A1 A2 A4
B1 B2 B4 C1 C4 D1 D2 D4 » après comparaison avec le même
seuil de détection qui a permis de détecté F1 et F2
simultanément.
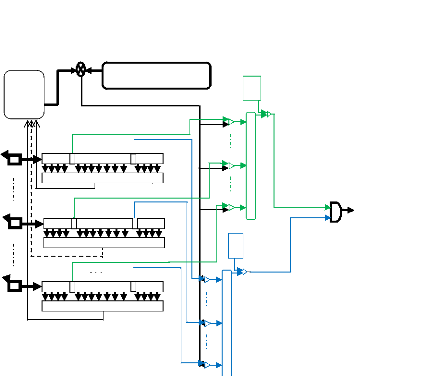
????
T
89
L
M
~ wi
i=1
W × T
--20,3us -+
0
????1
--20,3us -+
1
M
Wl
--20,3us -+
WL
Facteur d'échelle= fct (pfa)
Figure 3.26 : schemas synoptique du
detecteur
CA-CFAR-BI-2D-F1F2
3.8.1. Probabilite de detection du CA-CFAR-BI-2D(F1F2) :
Les deux impulsions F1 et F2 sont très proches l'une de
l'autre, ceci va nous permettre de prendre les même cellules de
references pour la detection des deux impulsions.
Soit « PdR1 » la probabilite de detection de F1 et
« PdR2 » la probabilite de
detection de F2, alors « PdRF1F2 = PdR1 ×
PdR2 = (PdR1)2= (PdR2)2 » est la probabilite
de detection des deux impulsions F1 et F2 simultanement, car e0
et r sont
estimes à partir du même groupe de cellules de
reference, et aussi, car la magnitude de F1 est egale a celle de F2.
On aura alors : PdF1F2 = (Pd2D)2
2
????

????????
1
?(1 - ????0) ~(1 - ????0) 1 + ????0
1+????????1????2
1+(1+????)????????1????2~ ?
1+????
???????? ???? × ? ????????
?
1
+????0 ~(1 - ????0) 1 + ????0
1+????????1????2 1+ 1+????
1+????+????????????1????2~
? 1+????+???? ?
????????????1????2 = ?
???? ????-????
????=????
?1 - (
×
?
?
1
????????
?
?
?
1 - ????0) ~(1 - ????0) 1 + ????0
1+????????1????2 1+(1+????)????????1????2
1+????
... (3.21)
1
????????
-????0 ~(1 - ????0) 1 + ????0
1+????????1????2 1+ 1+????
1+????+????????????1????2
1+????+????
3.8.2. Probabilité de fausse alarme du CA-CFAR-BI-2D
(F1F2)
?
? ?
?
? ?
?
? ?
1
?1 - (1 - ????0) ~(1 - ????0) 1
1+????????1????2 + ????0 1+(1+????)????????1????2~ ?
? ?
× ? ? ?
????
????????
1
(1 - ????0) ~(1 - ????0) 1
1+????????1????2 + ????0 1+(1+????)????????1????2~
????????
1
+????0 ~(1 - ????0) 1 + ????0
1+????????1????2 1+ ????????1????2~
1+????
???????? ????-???? ?
????????
1
~(1 - ????0) 1 + ????0
1+????????1????2 1+ ????????1????2~
1+????
-????0 ?
? ? ?
?
???????? ???? × ?
?
????
????=????
... (3.22)
????????????????1????2 = ? ?
?
2
La ???????????? peut être déduite en mettant «
s=0 » dans l'expression (3.21) :
3.8.3. Performance du CA-CFAR-BI-2D(F1F2)
Nous procédons toujours par les trois étapes :
a) On fixe PfaR F1F2 =10-6.
b) T F1F2 est calculé après
résolution de l'équation (3.22).
c) On remplace T F1F2 dans l'expression (3.21) et on
calcule la probabilité de détection PdRF1F2 pour
différentes valeurs de s.
Pd en fonction du rapport SNR avec une Pfa=1e-6
|
Pd
|
1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0
|
?
Pd=0.93 / SNR=17

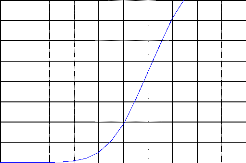
FNR=50(dB)
CACFAR-BI-2D-F1F2 / e0=.05
0 2 4 6 8 10 12 14 16 18 20
SNR (dB)
Figure 3.27 : la probabilité de détection du
CA-CFAR-BI-2D(F1F2)
en fonction du SNR pour r=50dB, e0 = 0,05,
M=4, L=6 et N=16.
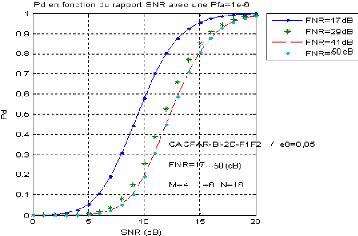
Figure 3.28 : la probabilité de détection du
CA-CFAR-BI2D(F1F2) en fonction du SNR pour ????0 = 0,05,
r=17..50dB,
Pd en fonction du rapport SNR avec une Pfa=1e-6
0 10 20 30 40 50
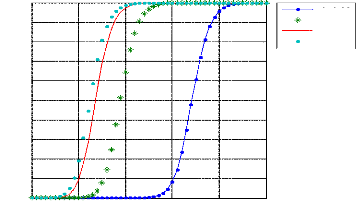
Pd
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
CACFAR-BI-2D-F1F2 / e0=0,02...0,05
M=4 L=6 N=16
FNR=50(dB)
e0=0,02 e0=0,03 e0=0,04 e0=0,05
SNR (dB)
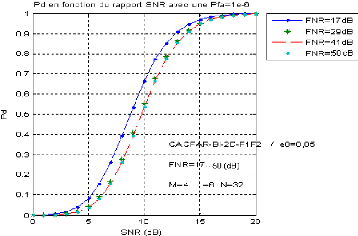
Figure 3.30 : la probabilité de détection du
CA-CFAR-BI-2D(F1F2) en
fonction du SNR pour ????0 = 0,05, r=17..50dB, M=4, L=6 et
N=32.
Pd en fonction du rapport SNR avec une Pfa=1e-6


e0=0,02 e0=0,03 e0=0,04 e0=0,05
1
0.9
0.8
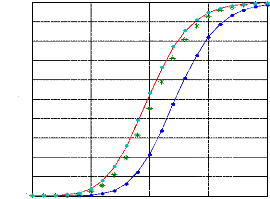
0.7
0.6
0.4
CACFAR-BI-2D-F1F2
0.3
FNR=50(dB)
0.2
M=4 L=6 N=32
0.1
0
Pd
0.5
/ e0=0,02...0,05
0 5 10 15 20
SNR (dB)
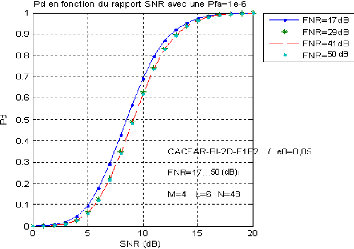
Figure 3.32 : la probabilité de détection du
CA-CFAR-BI-2D(F1F2) en
fonction du SNR pour ????0 = 0,05, r=17..50dB, M=4, L=6 et
N=48.
Pd en fonction du rapport SNR avec une Pfa=1e-6

e0=0,02 e0=0,03 e0=0,04 e0=0,05
1
0.9
0.8
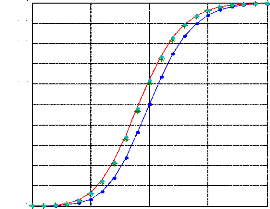
0.7
0.6
0.4
CACFAR-BI-2D-F1F2
Pd
0.5
/ e0=0,02...0,05
0.3
FNR=50(dB)
0.2
M=4 L=6 N=48
0.1
0
0 5 10 15 20
SNR (dB)
Sur les figures 3.27, 3.28 et 3.29 où le nombre des
cellules de référence N=16, ont retient que le CA-CFAR-BI-2D-F1F2
est un schéma efficace, néanmoins ont remarque une nette
diminution de la probabilité de détection pour des valeurs e0
<0,04. Ceci est dû à une mauvaise estimation du signal
parasite. On peut améliorer cette estimation en augmentant le nombre des
cellules de références(N).
Sur les figures 3.30, et 3.31 où le nombre des cellules
de référence N=32, l'estimation du signal parasite a
été améliorer et la probabilité de détection
aussi. Ont remarque que la ???????? pour les différentes valeurs de e0
commence à converger vers un seul graphe.
Pour N=48 ont remarque sur les figures 3.32 et 3.33 que le
graphe de la probabilité de détection est pratiquement le
même pour les différentes valeurs de e0 et de FNR.
Pour N=48 et ???????????? = 10-6 la probabilité
de détection avoisine 0,98 pour toute les valeurs de e0 et r
(e0=0,02...0,05 et r=17dB...50dB).
3.9. Détection CA-CFAR-BI-2D de trois (3)
impulsions simultanément:
En plus des deux impulsions F1 et F2 on peut ajouter une
troisième impulsion, par rapport au fait qu'une réponse SSR
comprend nécessairement et au moins une impulsion de codage (A1 A2 A4 B1
B2 B4 C1 C4 D1 D2 D4). Cette réflexion nous amène à
ajouter à la porte logique (AND) du schéma de la figure 3.26 le
schéma suivant :
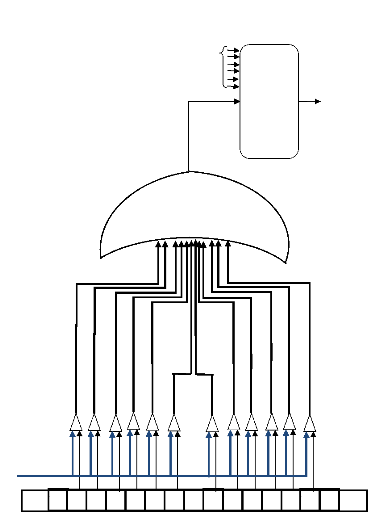
F
C1
C1
C4
B4
A1
A2
A4
B2
D1
D2
X B1
D2 F2
96
OR
Entrés à partir des portes OR des « L
» autres récurrences
Intégration
binaire
M/L
Vers la
Porte
AND
W× T
Figure 3.34 : détection d'au moins une impulsion code
3.9.1. Probabilité de détection du
CA-CFAR-BI-2D (3I)
La probabilité de détection de trois impulsions F1,
F2 et l'une des impulsions de codage sera formulée comme suit :
Pd31 = (Pd2D)3

×
?1 -
?
?
????????3???? =
?
????????
1
(1 - ????0) ~(1 - ????0) 1 + ????0
1+????3???? 1+(1+????)????3????~
1+????
1
+????0 ~(1 - ????0) 1 + ????0
1+ ????3???? 1+ 1+????
1+????+????????3????~
1+????+????
????
????????
?
???????? ???? × ?
?
3
1
(1 - ????0) ~(1 - ????0) 1 + ????0
1+????3???? 1+(1+????)????3????
1+????
????????
1
-????0 ~(1 - ????0) 1 + ????0
1+ ????3???? 1+ 1+????
1+????+????????3????~
1+????+????
????????
?
?
?
???? ????-????
????=????
... (3.23)
3.9.2. Probabilité de fausse alarme du CA-CFAR-BI-2D
(3I)
?
?
?
?
?
?
?1 - (1 - ????0) ~(1 - ????0) 1
× ? ?
???????? ????
1
(1 - ????0) ~(1 - ????0) 1
1+????3???? + ????0 1+(1+????)????3????~ ?
???????? ?
1
+????0 ~(1 - ????0) 1 + ????0
1+????3???? 1+ ????3????~
1+???? ?
1
~(1 - ????0) 1 + ????0
1+????3???? 1+ ????3????
1+????
-????0 ?
? ?
?
???????? ???? × ?
?
????
????=????
????-????
?
???????? ?
~
?
???????? ?
1
1+????3???? + ????0 1+(1+????)????3????~ ? ?
... (3.24)
3
????????????3???? = ?
La ???????????? peut être déduite en mettant «
s=0 » dans l'expression (3.23) :
3.9.3. Performance du CA-CFAR-BI-2D (3I)
Nous procédons toujours par les trois étapes :
a) PfaR 3I =10-6.
b) T 3I sera calculé après
résolution de l'équation (3.24).
c) On remplace T 3I dans l'expression (3.23) et on
calcule la probabilité de
détection P????R 3I pour différentes
valeurs de s.
Pd en fonction du rapport SNR avec une Pfa=1e-6
Pd
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
CACFAR-BI-2D-3I / e0=0,05
FNR=50(dB)
Pd=0.9957 / S
NR=17
0 2 4 6 8 10 12 14 16 18 20
SNR (dB)
Figure 3.35 : la probabilité de détection du
CA-CFAR-BI-2D-(3I) en
fonction du SNR pour r=50dB, e0 = 0,05,
M=4, L=6 et N=48.
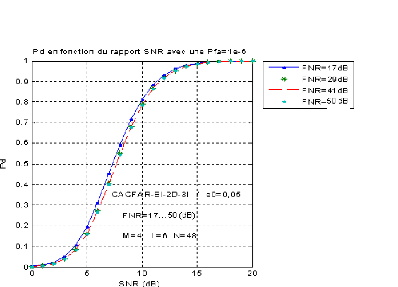
99
Figure 3.36 : la probabilité de détection du
CA-CFAR-BI-2D (3I) en
fonction du SNR pour ????0 = 0,05, r=17..50dB,
M=4, L=6 et N=48,
avec une Pfa=10-6.
Pd en fonction du rapport SNR avec une Pfa=1e-6
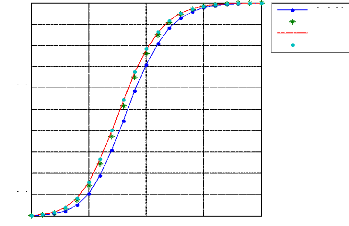
0.4
CACFAR-BI-2D-3I / e0=0,02...0,05 FNR=50(dB)
M=4 L=6 N=48
0.1
0
0 5 10 15 20
Pd
0.5
1
0.9
0.8
0.7
0.6
0.3
0.2
e0=0,02 e0=0,03 e0=0,04 e0=0,05
SNR (dB)
Figure 3.37 : la probabilité de détection du
CA-CFAR-BI-2D (3I)
en fonction du SNR pour r=50dB, ????0
=0,02.. 0,05, M=4, L=6 et
N=48, avec une Pfa=10-6.
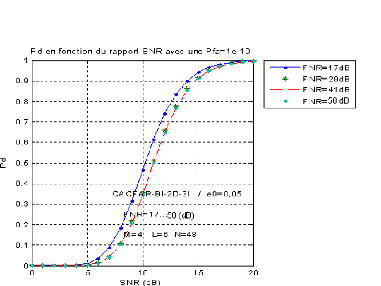
100
Figure 3.38 : la probabilité de détection du
CA-CFAR-BI-2D (3I) en
fonction du SNR pour ????0 = 0,05, r=17..50dB,
M=4, L=6 et N=48,
avec une Pfa=10-10.
Pd en fonction du rapport SNR avec une Pfa=1e-10
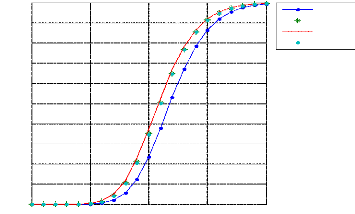
0.4
0.3
/ e0=0,02...0,05
FNR=50(dB)
0.2
M=4 L=6 N=48
0.1
0
0 5 10 15 20
Pd
0.5
CACFAR-BI-2D-3I
1
0.9
0.8
0.7
0.6
e0=0,02 e0=0,03 e0=0,04 e0=0,05
SNR (dB)
Figure 3.39 : la probabilité de détection du
CA-CFAR-BI-2D (3I)
en fonction du SNR pour r=50dB, ????0
=0,02.. 0,05, M=4, L=6 et
N=48, avec une Pfa=10-10.
Sur les figures 3.36 et 3.37 on remarque que pour N=48 et Pfa =
10-6 la
probabilité de détection pour s >17dB est
supérieure a 0,99 pour toute les valeurs de e0 et r (e0=0,02...0,05 et
r=17dB...50dB). Cette Performance nous pousse à revoir la valeur de
probabilité de fausse alarme à la baisse.
Les figures 3.38 et 3.39 confirme l'amélioration de notre
détecteur
même pour une Pfa = 10-10.
Ainsi la probabilité de détection minimum pour
s>17dB est supérieure à 0,95 pour toute les
valeurs de e0 et de r (e0=0,02...0,05 et r=17dB...50dB).
3.10. Conclusion
En comparant le détecteur conventionnel (binaire a
seuil fixe) au détecteur CA-CFAR-BI-2D (3I), il est claire que le
deuxième détecteur est plus performent que le premier, toutefois
le CA-CFAR-BI-2D (3I) nécessite une bonne estimation des
paramètres FRUIT.
En associant l'estimateur par censure direct au
détecteur CA-CFAR-BI2D (3I) le schéma se complète et il
nous reste qu'à valider les résultats par la méthode
MONTE-CARLO.
CHAPITRE 4
ETUDE DE LA DETECTION (ADAPTATIVE) «
CA-CFAR-ABI-2D (3I) »
Par le procédé MONTE-CARLO
4.1. Introduction
A la fin du chapitre 3, nous sommes arrivés à la
conclusion que le processeur CA-CFAR-BI-2D (3I) est très efficace,
à condition que les paramètres définissant les impulsions
interférentes « FRUIT » (å0, r) soient connus, or ces
paramètres sont a priori inconnus. L'association de ce processeur avec
l'estimateur des paramètres FRUIT permet une sélection adaptative
assez correcte des paramètres définissant les impulsions
interférentes et ainsi du facteur d'échelle (T), nous allons
appeler cette association CA-CFAR- ABI-2D (3I), la lettre A indiquant le mot
ADAPTATIF.
Toutefois, les erreurs de l'estimateur des paramètres
FRUIT peuvent induire à des contreperformances qui pourraient remettre
en question notre processeur. Afin de dissiper ce doute nous allons dans ce
chapitre étudier les performances du CA-CFAR- ABI-2D (3I).
4.2. Etude des performances du CA-CFAR- ABI-2D (3I)
L'étude de la performance du CA-CFAR- ABI-2D (3I) se fera
en sept (7) étapes « a, b, c, d, e, f et g», et selon
l'approche MONTE-CARLO avec un très
grand nombre d'essais (nMC = 5000 essais) afin d'avoir une
appréciation
acceptable des résultats avec un graphe de performances le
plus lisse possible:
a) Choisir å0, r et fixer une probabilité de fausse
alarme ????????????3????.
b) Simuler au nombre de nMC essais les « NL
» cellules de référence par
l'hypothèse H0 avec å0, r.
Les impulsions d'interférence seront simulées
comme des impulsions avec un temps d'arrivée « poissonnien »
dont la probabilité d'apparition est définie par « å0
» et l'amplitude par une fonction de distribution exponentielle.
c) Estimer pour chaque essai et par la méthode de censure
directe les
paramètres du FRUIT å0* , r*
.
d) Calculer pour chaque essai le seuil de détection
adaptatif T3iA à partir de l'expression (3.24) en utilisant
les paramètres estimés å0* , r*et
la
probabilité de fausse alarme Pfa3J
fixée dans l'étape (a).
e) Simuler au nombre de nMC les cellules sous test
par l'hypothèse H1
avec å0, r et A. pour les différentes valeurs de s
(SNR).
f) Calculer par la méthode MONTE-CARLO la
probabilité de fausse
alarme Pfa3JA imposée par le seuil de détection
adaptatif T3iA, cette
étape nous informe sur l'effet de l'erreur de
l'estimateur sur la probabilité de fausse alarme réel qui en
résulte (Pfa3JA) .
g) Calculer par la méthode MONTE-CARLO la
probabilité de détection
Pd3JA imposée par le seuil de détection adaptatif
T3iA pour les
différentes valeurs de SNR (s). Cette
probabilité de détection représente l'effet de l'erreur de
l'estimateur sur les performances de détection.
Les étapes a, b,.., g sont résumées sur
l'organigramme suivant :
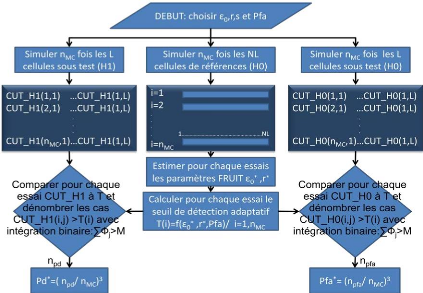
Figure 4.1: L'organigramme de la simulation Monte-Carlo
4.3. Résultats et discussions
4.3.1. Résultats
Dans le but de présenter les performances de
détection pour tous les cas possibles concernant les paramètres
FRUIT, nous allons schématiser pour les différentes valeurs du
rapport FRUIT sur bruit « FNR = 50, 39, 28, 17, 06, 0 [dB] » quatre
graphes, chaqu'un représentant la variation de la probabilité
de
détection ( ????????3???????? ) en fonction du rapport
signal sur bruit (SNR) pour une
probabilité d'apparition du FRUIT « å0 =
0.02, 0.03, 0.04, 0.05 », et nous allons
résumer pour tout les
cas (FNR, å0) la probabilité de fausse alarme imposée
par l'erreur d'estimation (????????????3????????), sur le Tableau
(4.1) .
Tableau 4.1 : la probabilité de fausse alarme
????????????3???????? imposée par l'erreur
d'estimation pour les différents paramètres
FRUIT.
|
FNR
|
|
50 dB
|
39 dB
|
28 dB
|
17 dB
|
06 dB
|
0 dB
|
|
|
3,13
|
2,06
|
8,98
|
8,09
|
8,89
|
4,85
|
|
0.02
|
|
|
|
|
|
|
|
|
× 10-12
|
× 10-12
|
× 10-12
|
× 10-11
|
× 10-10
|
× 10-13
|
|
|
5,06
|
2,99
|
5,05
|
9,72
|
5,36
|
1,03
|
|
0.03
|
|
|
|
|
|
|
|
|
× 10-12
|
× 10-11
|
× 10-11
|
× 10-11
|
× 10-10
|
× 10-13
|
|
å0
|
|
3,20
|
4,59
|
5,91
|
10,96
|
8,46
|
4,19
|
|
0.04
|
|
|
|
|
|
|
|
|
× 10-11
|
× 10-11
|
× 10-12
|
× 10-11
|
× 10-10
|
× 10-13
|
|
|
5,39
|
2,70
|
2,99
|
11,99
|
14,10
|
13,37
|
|
0.05
|
|
|
|
|
|
|
|
|
× 10-11
|
× 10-11
|
× 10-11
|
× 10-11
|
× 10-10
|
× 10-13
|
Pd en fonction du rapport SNR avec une Pfa3I=1e-10
|
|
|
|
|
|
e0 =0,02
e0 =0,03
e0
=0,04
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e0 =0,05
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pd
|
1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1
|

0

0 2 4 6 8 10 12 14 16 18 20
SNR (dB)
Figure 4.2: la probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction
du SNR pour r=50dB, ????0 =0,02.. 0,05, M=4, L=6,
N=200, et nMC = 5000.
Pd en fonction du rapport SNR avec une Pfa3I=1e-10
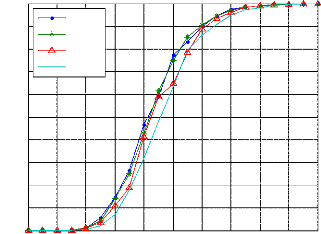
1
0.9
0.8
0.7
0.6
Pd
0.5
e0 =0,02 e0 =0,03 e0 =0,04
e0 =0,05
0.4
0.3
0.2
0.1
0
0 2 4 6 8 10 12 14 16 18 20
SNR (dB)
Figure 4.3: la probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction
du SNR pour r=39dB, ????0 =0,02.. 0,05, M=4, L=6,
N=200, et nMC = 5000.
Pd en fonction du rapport SNR avec une Pfa3I=1e-10
Pd
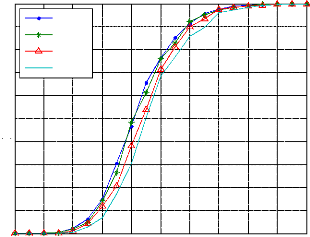
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
e0 =0,02 e0 =0,03 e0 =0,04
e0 =0,05
0 2 4 6 8 10 12 14 16 18 20
SNR (dB)
Figure 4.4: la probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction
du SNR pour r=28dB, ????0 =0,02.. 0,05, M=4, L=6,
N=200, et nMC = 5000.
Pd en fonction du rapport SNR avec une Pfa3I=1e-10
Pd
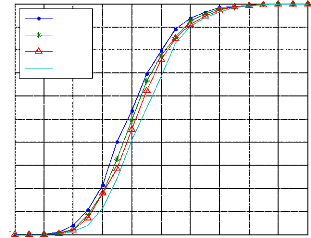
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
e0 =0,02 e0 =0,03 e0 =0,04
e0 =0,05
0 2 4 6 8 10 12 14 16 18 20
SNR (dB)
Figure 4.5: la probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction
du SNR pour r=17dB, ????0 =0,02.. 0,05, M=4, L=6,
N=200, et nMC = 5000.

Pd en fonction du rapport SNR avec une Pfa3I=1e-10
Pd
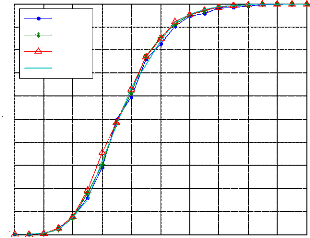
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1
e0 =0,02 e0 =0,03 e0 =0,04
e0 =0,05
0 2 4 6 8 10 12 14 16 18 20
SNR (dB)
Figure 4.6: la probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction
du SNR pour r=06dB, ????0 =0,02.. 0,05, M=4, L=6,
N=200, et nMC = 5000.
Pd en fonction du rapport SNR avec une Pfa3I=1e-10
|
Pd
|
0.1 0.09 0.08 0.07 0.06 0.05 0.04 0.03 0.02 0.01
|
|
|
|
|
|
|
|
|
|
e0 =0,02 e0 =0,03 e0 =0,04
e0 =0,05
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0
0 2 4 6 8 10 12 14 16 18 20
SNR (dB)
Figure 4.7: la probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction
du SNR pour r=0dB, ????0 =0,02.. 0,05, M=4, L=6,
N=200, et nMC = 5000.
Pd en fonction du rapport SNR avec une
Pfa3I=1e-10
|
|
|
|
|
|
|
e0 =0,02
e0 =0,03
e0
=0,04
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e0 =0,05
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pd
|
1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1
|

0

0 2 4 6 8 10 12 14 16 18 20
SNR (dB)
Figure 4.8: la probabilité de détection du
CA-CFAR-ABI-2D (3I) en fonction
du SNR pour r=0dB, e0 =0,02.. 0,05, M=4, L=6,
N=200, et nMC = 5000.
Avec une estimation majoré a e0 =0,02 et
r=9dB
4.3.2. Discussions
En analysant les Figures 4.1 à 4.6 et le Tableau 4.1 on
peut déduire que le détecteur CA-CFAR-ABI-2D (3I) est très
performant sous condition que les paramètres FRUIT aient des valeurs
significatives, dans le cas contraire (Figures 4.6) la courbe de performance se
dégrade des que ces paramètres
s'affaiblies (FNR = 0dB et e0= 0.02).
La dégradation des performances de détection est
due à une mauvaise estimation des paramètres FRUIT causée
par une probabilité de censure qui diminue significativement pour «
FNR < 9dB » (figure 3.9). On peut remédier a ce problème
en majorant l'estimateur des paramètres FRUIT (FNR et e0) aux valeurs
« 9 dB » et « 0.02 ». Ainsi pour toute estimation
au-dessous des valeurs
« FNR=9 dB » et « e0 =0.02 » on attribuera
les mêmes valeurs de majoration.
La figure 4.7 illustre la performance du détecteur
CA-CFAR-ABI-2D (3I) avec estimateur majoré pour le cas
ou les paramètres FRUIT sont faibles
(FNR=0 dB et e0 =0,02.. 0,05).
CONCLUSION
En guise de conclusion générale, nous allons
tenter d'établir une synthèse globale sur le travail qui a
été réalisé dans ce mémoire.
Nous avons d'abord, étudié le fonctionnement du
système radar secondaire, particulièrement la partie
détection et le problème des réponses asynchrone (FRUIT).
A partir de là nous nous avons étudié la
possibilité d'établir un détecteur adaptatif CFAR dans le
but d'éliminer le problème du FRUIT, en fixant une
probabilité de fausse alarme à une valeur significativement
inferieure à celle du détecteur conventionnel (à seuil
fixe) employé dans ce type de radar jusqu'à présent.
La première étape a été de
modélisés les différent signaux, sous l'hypothèse
que le FRUIT se présente comme des impulsions éparpillées
dans le temps avec
une probabilité d'apparition « ????0 » et une
distribution en amplitude Gaussienne de moyenne nulle et d'écart type
óF. La distribution du bruit thermique est supposée Gaussienne
ainsi que celle du signal utile (réponse SSR).
A fin d'établir une référence à
partir du détecteur conventionnel, nous avons appliqué le model
mathématique élaboré, pour étudier les performances
du détecteur a seuil fixe. Par la suite et dans le cadre de notre
mémoire, on a commencé par l'introduction du détecteur
CA-CFAR sur le quel on a établît la base de toutes les formules
des performances des détecteurs lui succédant, jusqu'au
détecteurs CA-CFAR-BI-2D.
A ce stade on est arrivé a la conclusion qu'une
fenêtre de référence très large du détecteur
CA-CFAR-BI-2D se rapproche du détecteur optimal de NeymanPearson
(binaire à seuil fixe). Nous devons souligner que ces détecteurs
CFAR ne peuvent fonctionner correctement sans une estimation adaptative des
paramètres FRUIT, pour cela nous avons proposé l'estimateur par
censure directe, qui par son schémas parallèle semble plus rapide
que l'estimateur par censure automatique.
Grâce aux particularités du signal réponse
SSR il nous a été permit d'améliorer
considérablement les performances de détection, notamment par le
schéma CA-CFAR-BI-2D (3I) qui s'apparente à un filtre
adapté (MATCHED FILTER) a trois (3) impulsions codées
intégrées dans le détecteur CA-CFAR-BI-2D.
En finalité nous aboutissons à une association
du CA-CFAR-BI-2D (3I) avec un estimateur à censure directe
majoré. Les résultats de la simulation
MONTECARLO ont confirmé la très bonne performance de cette
association par rapport au détecteur conventionnel.
Perspective
Nous suggérons pour les travaux de recherche future en
détection adaptative pour les radars secondaire de surveillance ce qui
suit :
> L'étude des performances de la détection
adaptative dans le cas d'interférence synchrone (GARBLE), et
l'utilisation des technique CFAR appropriées (SO-CFAR, OS-CFAR, ...).
> L'étude des performances de la détection
adaptative dans le cas d'interférence synchrone (GARBLE), en utilisant
la technique MONOPULSE dans l'établissement du futur
détecteur.
> La généralisation du détecteur
adaptatif CA-CFAR-BI-2D (3I) pour le radar secondaire mode S.
> L'utilisation du détecteur adaptatif simultané
pour d'autres systèmes de transmission, notamment, le DME.
LISTE DES ACRONYMES
ACAS Airborne Collision Avoidance System
ADS-B Automatic Dependent Surveillance - Broadcast
ALE Actual Leading Edge
AP adresse/parité
ATC Air Traffic Control
ATE Actual Trailing Edge
CA-CFAR Cell-Averaging Constant False Alarm Rate
CA-CFAR-BI CELL AVERAGING - CFAR - BINARY INTEGRATION
CA-CFAR-BI-2D CELL AVERAGING - CFAR - BINARY INTEGRATION - avec
estimation en deux dimensions.
CFAR Constant False Alarm Rate
CUT cellule Under Test
DF downlink format (format descendant)
DME Distance Measuring Equipment
DMTL Dynamic Minimum Triggering Level
DPSK Differential Phase Shift Keying
E/R Emetteur/Récepteur
FNR FRUIT Noise Ratio
FRUIT False Replies Un-synchronized In Time
GO-CFAR Greatest-of- Constant False Alarm Rate
HF High Frequency
IFF Identification Friend Foe
IISLS Improved Interrogation path Side-Lobe Suppression
IRF Interrogation Repetition Frequency
ISLS Interrogation path Side-Lobe Suppression
LAX Los Angeles International Airport
MLE Monopulse Leading Edge
MSSR Monopulse Secondary Surveillance Radar
MTL Minimum Triggering Level
NS inclinaison négatives
OACI Organisation de l'Aviation Civile Internationale
OBA Off-Boresight Angle
OS-CFAR Order Statistic- Constant False Alarm Rate
PI parité/identification de l'interrogateur
PLE Pseudo Leading Edge
PPI Plan Position Indicator
PS inclinaison positives
PSR Primary Surveillance Radar
QRSLS La quantification du signal RSLS
RADAR Radio Detection and Ranging
RF Radio Frequency
RSLS Receiver Side Lobe Suppression
SLD Square Law Detector
SNR Signal Noise Ratio
SO-CFAR Smallest-of- Constant False Alarm Rate
SPI Special Position Indicator
SQÓ La quantification du signal Somme
SSR Secondary Surveillance Radar
TFAC Taux de Fausses Alarmes Constant
TM-CFAR Order Statistic- Constant False Alarm Rate
UF uplink (format montant)
VFR Visual Flight Rule
XLE Extra Leading Edge
LISTE DES SYMBOLES
amp(.) Amplitude
E[.] Estimation d'une variable aléatoire
f(è) Fonction d'écartomètrie
f(y|H0) Fonction de distribution de la variable aléatoire
y sous l'Hypothèse
Nulle
f(y|H1) Fonction de distribution de la variable aléatoire
y sous l'Hypothèse Un
Fb Facteur de bruit
Gi Gain de l'antenne de l'interrogateur
Gt Gain de l'antenne du transpondeur
H0 Hypothèse Nulle
H1 Hypothèse Un
imp (Ó) impulsion issue du diagramme somme
imp (Ù) impulsion issue du diagramme de contrôle
K Constante de Boltzmann
L Longueur de la fenêtre glissante
L Pertes additionnelles
L{. } Transformé de Laplace
M Nombre minimal de réponses
max(A, B) Maximum entre A et B
min(A,B) Minimum entre A et B
MW(.) Fonction génératrice des moments d'une
variable aléatoire W
Pei Puissance crête d'émission de l'interrogateur
Pet Puissance crête d'émission du transpondeur
Pri Puissance reçue par l'interrogateur
Prt Puissance reçue par le transpondeur
Pb Puissance du bruit
p Probabilité de réponse du transpondeur
pdr Probabilité de détection d'une
réponse
Pd Probabilité de Détection
PM Probabilité de non-détection
PB Probabilité de reconnaitre H0 sans faire d'erreur
pfa Probabilité de Fausse Alarme
pa Probabilité d'apparition
Pfc Probabilité de fausse censure
QCA L'estimation du parasite par un CA-CFAR
QGO L'estimation du parasite par un GO-CFAR
QSO L'estimation du parasite par un SO-CFAR
QOS L'estimation du parasite par un OS-CFAR
R Distance radar cible
r Rapport FRUIT a bruit (FNR)
????* Rapport FRUIT a bruit (FNR) estimé
s Rapport signal a bruit (SNR)
T Facteur d'échelle
T° Température ambiante
ta Temps d'apparition
á Contrainte de la Probabilité de Fausse Alarme
â Seuil de détection
â 1 Perte entre aériens.
â 2 Perte dans la ligne de transmission entre les ensembles
E/R
â 3 Pertes dues à l'atténuation
atmosphérique
â 4 Perte due à la diminution du gain d'antenne a
partir de l'élévation 0,25°.
â 5 Perte due à l'égalisation
longitudinale.
Ä différence (diagramme différence)
????? La bande passante
Ó somme (diagramme somme)
å0 La probabilité d'apparition du FRUIT
å0 * La probabilité d'apparition du FRUIT
estimé
Ë(.) Rapport de vraisemblance
ëa Longueur d'onde utilisée
ëL Multiplicateur de Lagrange
ó Écart type
Ù omnidirectionnelle (diagramme de contrôle)
REFERENCES BIBLIOGRAPHIQUES
1. OACI « Annexe 10: Télécommunications
Aéronautiques, volume IV: systèmes radar de surveillance et
systèmes anticollision ». 2 eme edition, Juillet
1998.
2. M. C. Stevens - « Secondary Surveillance Radar
», Artech House, Boston and London, 1988.
3. P. R. Drouilhet, "DABS: A System Description", Project Report
ATC-42, Lincoln Laboratory, M.I.T, 1974.
4. V. A. Orlando, P. R. Drouilhet, "Mode S Beacon System:
Functional Description" Project Report ATC-42, Lincoln Laboratory, M.I.T,
1986.
5. R. R. LaFrey, J. E. Laynor, R. G. Nelson, R. G. Sandholm,
"The Transportable Measurements Facility (TMF) System Description", Project
Report ATC-91, Lincoln Laboratory, M.I.T, 1980
6. R. G. Nelson, J. H. Nuckols, "A Hardware Implementation of
the ATCRBS Reply Processor Used in DABS", Project Report ATC-78, Lincoln
Laboratory, M.I.T 1977.
7. W. H. Harman, "Airborne Measurements of ATCRBS Fruit»,
Project Report ATC84, Lincoln Laboratory, M.I.T, 1978.
8. G. Denom, "Les radars secondaires", ENAC, France,
1971.
9. G. Galati, S. Gelli, F. Fiori, E.Piracci, "An Advanced
CFAR Technique for SSR Reply Detection ", International Radar Symposium -
IRS'07, Cologne, Germany, 2007, p. 4.
10. I .Garvanov, Chr. Kabakchiev, "Adaptive Binary
Integration CFAR Processing for Secondary Surveillance Radar", Cybernetics and
Information Technologies Volume 9, No 1, Sofia, pp 46-54, ?~2009.
11. I.Garvanov, V.Behar, Chr.Kabakchiev, "CFAR Processors in
Pulse Jamming", 5th International Conference, Numerical Methods and
Applications - NM@A-02, Berlin, Heidelberg, Springer-Verlag. Lecture Notes in
Computer Science, LNCS 2542, pp 291-298, 2003.
12. I .Garvanov , "CFAR Pulse Detectors in the Presence of
Impulse Noise", Cybernetics And Information Technologies Volume 8, No 2, Sofia,
pp 26-39, 2008.
13. P.Akimov, F.Evstratov, S.Zaharov, "Radio Signal Detection",
Radio and Communication, Moscow, 1989, pp195-203, (en Russe).
14. S.Himonas, M.Barkat, "Automatic Censored CFAR Detection for
Non-
homogeneous Environments", IEEE Trans, Vol. AES-28, No 1, pp 286-304,
1992
15. S.Himonas, "CFAR Integration Processors in Randomly Arriving
Impulse Interference", IEEE Trans, Vol. AES-30, No 4,pp 809-817, 1994.
16. M. Barkat, "Signal Detection and Estimation", Artech
House, Boston, London, Second Edition, September 2005.
17. J.Minkoff, "Signal Processing Fundamentals and
Applications for
Communications and Sensing Systems", Artech House,
Boston, London, 2002.
18. A.Papoulis, "Probability, Random Variables, and
Stochastic Processes", McGraw-Hill, 1965.
19. J.I. Marcum, "A Statistical Theory of Target Detection by
Pulsed Radar", Project RAND, Douglas Aircraft Company, Inc., RA-15061, December
1947.
20. S.M.Kay, "Fundamentals of Statistical Signal Processing,
Volume II : Detection Theory ", Prentice Hall PTR, New Jersey 1993.
21. S.M. Ross, "Initiation aux probabilités",
Traduit de l'américain par Christian Hofer, Presses Polytechniques
Romandes, 1987.
22. C. Labrousse, "statistique, exercices corrigés
avec rappels de cours", Tome 1,2 et 3, Dunod, 4e édition,
1978.
23. H. M. Finn and R. S. Johnson, "Adaptive detection mode
with threshold control as a function of spatially sampled clutter level
estimates", RCA review VOL 29, pp 414-464, September 1968.
24. V. G. Hansen and J. H. Sawyers, "Detectability loss due
to Greatest-of-Selection in a Cell-Averaging CFAR", IEEE Transactions on
Aerospace and Electronic systems, VOL 16, pp 115-118, January 1980.
25. J.L. Schiff, " The Laplace Transform: Theory and
Applications ", Springer, 1991.
26. J.Darricau, «Physique et Théorie du
Radar", Tome I et II, SODIPE, paris, 1981.
27. B. Atrouz,"Les Systèmes Radar" polycopie de cours
pour ingénieur, Ecole Militaire Polytechnique, Alger 2004.
28. M.Hamadouche. " Détection adaptative CA-CFAR et
CMAP-CFAR de cibles radar dans des clutters gaussien et weibull
distribués ", Thèse de Doctorat d'état Université
de Constantine 2000.
| 

