2.3-L'etude des actions mecaniques
D'une manière générale, une action
mécanique est un processus qui maintient un équilibre, provoque
une déformation, produit un mouvement ou s'oppose à un
mouvement.
Les actions mécaniques qui agissent sur un point
matériel peuvent être représentées par des vecteurs
ayant pour origine ce point. Ces grandeurs ne sont pas directement
accessibles par la mesure, seules leurs conséquences
peuvent être déterminées : présence ou absence
d'équilibre, mesure de déplacement, mesure de
déformations, etc.
Les actions mécaniques sont classées en :
§ force : caractérisée par sa
résultante et l'axe de moment nul du glisseur (point
d'application de la force). Une force tend à
déplacer le corps sur laquelle elle s'exerce, suivant la direction
définie par sa résultante, donc parallèle au support de la
force.
§ couple : est équivalent à un couple de deux
forces de résultantes opposées, donc de
support parallèle. Il est caractérisé
par son vecteur-moment, indépendant du point considéré. Un
couple tend à faire tourner le corps sur lequel il s'exerce, dans le
sens direct autour de la direction définie par le vecteur-moment de
couple.
§ action mécanique quelconque : peut être
décrite comme étant la superposition d'une force et d'un
couple.
Afin de traduire par des équations l'effet des actions
mécaniques sur l'état du centre de gravité de
l'athlète, on est amené à énoncer l'axiome suivant
: Toute action mécanique s'exerçant sur un point
matériel peut être représenté par un torseur
associé à ce point.
2.4-Determination du torseur dynamique
Le torseur est un objet mathématique unique qui
s'exprime en tout point d'un
~~
référentiel de l'espace à l'aide de deux
vecteurs : le premier noté R
|
, appelé résultante, est
|
|
~~~
invariant par changement de point dans le
référentiel ; le second noté ® (
O,R)~~
moment du torseur au point O, variant avec le point
considéré.
|
est le vecteur-
|
|
r~~ ~~
R F
i
~~~~
==~~~ Éq.III.2
ODX( O,ii)
DX( O,PO
Les quatre torseurs obtenus suite à la
procédure de conversion des tensions sont respectivement exprimés
par rapport aux repères de référence des deux PFF
(ap) et des deux capteurs composites
(am). L'interprétation de ces grandeurs
n'est possible que si tous les efforts sont exprimés par rapport
à un même référentiel (g0) (figure
26).
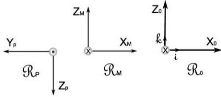
Figure 26 Orientation des repères : PFF (ap),
capteur main (gM) et absolue (g0)
Les deux repères de références des
capteurs composites instrumentant les appuis mains et désignés
par aM possèdent la même orientation que 0
contrairement aux repères PFF (gtp) .
La connaissance de l'orientation de gtp dans
g0 est nécessaire pour définir la matrice
de
passage de a0 à Rp notée
R0p . Il s'agit d'une matrice de forme
carrée (3×3) dont lescolonnes sont les composantes des
vecteurs unitaires de gtp dans
g0.
L'expression des termes de cette matrice de passage
Ro dans le cas du repérage
angulaire de Rp par rapport à
g0 peut être définie par plusieurs
méthodes, tel que :
§ les angles d'Euler qui se caractérisent par la
succession de trois rotations (roti) d'angle
v, 0, v, respectivement autour des
axes Z0, X0, Z0 noté :
~ ????? ~ ' ????? ~ '
????? p
rot ( Z , ø )
rot ( X , è ) rot ( Z ,
ö )
1 0 2 0 3 0
0 0 0
? les angles de Cardan ou RTL (Roulis-Tangage-Lacet)
définis également par une succession de trois rotations
v1, v2, v3 pour définir le passage de
a0 à Rp suivant trois axes
différents, X0, Y0 et Z0 noté :
~ ????? ~ ' ????? ~ '
????? p
rot ( X , ? ) rot
( Y , ? ) rot ( Z , )
1 0 1 2 0 2 3 0 ? 3
0 0 0
La définition de ces matrices de passages repose sur le
principe de la transformation simple qui permet de déduire une base
à partir d'une autre par une seule rotation (sans tenir compte de la
translation) d'angle 0 autour de l'axe OX0 ou OY0 ou
OZ0. De ce fait, les angles d'Euler et les angles de Cardan sont
définis par une succession de transformations simples.
Trois matrices décrivant chacune une transformation simple
d'un angle 0 autours d'un seul axe à la fois peuvent être
décrites :
|
rot(X 0 , )=
è
|
1
0
0
|
0
Cè
Sè
|
0
-Sè
Cè
|
rot(Y 0 , )=
è
|
Cè
0
-Sè
|
0
1
0
|
Sè
0
Cè
|
Cè -Sè 0
rot(Z 0 , )=
è Sè Cè
0
0 0 1
avec C désigne la fonction cosinus et
S la fonction sinus.
Ainsi, dans le cas de cette étude, les
éléments de la matrice de passage R 0
peuvent
p
être déterminés suite à la
succession de deux transformations simples. La première comporte
une
rotation d'angle á = r autour de l'axe OY0,
la deuxième est une rotation d'angle
0 = - 2 autour de l'axe OZ0
~ ?????~ ' ?????
p
rot Y á
1 0
( , ) rot Z è
2 ( 0 , )
0 0
Compte tenu de la définition d'une matrice de passage, il
est possible d'écrire :
[
CèCá -Sè CèSá 0 -1
0
R 0 rot 1 ( Y 0
, ) rot 2 ( Z 0 , )
p = á · è SèCá
Cè SèCá -1 0 0
= =
-Sá 0 Cá j 0 0 -1
|
~~
Le produit matriciel de R0p par
le vecteur Fap
|
du torseur des actions extérieures à
|
l'athlète décrit initialement par rapport au
repère Rp, permet de l'exprimer par rapport au
repère absolu g0 :
|
~~ ~~
Figt0 =
R0!p
Figtp
|
Éq.III.3
|
De même, le calcul suivant est effectué afin
d'exprimer les moments initialement décrient en Oi de
Rp dans R0:
~~~ ~~~
DX(Oi,iii)/gt0
= Éq.III.4
Les moments de force calculés en Oi (origine d'un
repère dynamomètre) et exprimés par rapport à
J0 présentent peu d'intérêt. Par contre,
un moment calculé en un centre
articulaire d'une articulation ou au centre de gravité
est beaucoup plus intéressant. La détermination de la position du
centre de gravité (G) par dynamométrie lors de la
position Prêt est décrite par la suite dans ce même
chapitre (§-III.4).
Il existe la relation suivante entre deux vecteurs-moments en
deux points Oi et G du
même référentiel (relation de transport des
moments) :
~~~ ~~~ ~~~ ~~~~~
Olt( G x) /
a0 = ®1(
Oi,k)/ gt0 + Ri /
91,0 ? OiG/910
Éq.III.5
La détermination des torseurs ( g ) au
niveau des quatre appuis : main droite (Md), main gauche
(Mg), pied droit (Pd) et pied gauche (Pg) par
rapport à g0 et leur addition, permet de définir
le torseur des actions mécaniques externes (
gG ) exercées au centre de
gravité de l'athlète.
5G/
90 = 'Md
/910 + 'Mg /
910 + 'Pd /
90 +5Pg
/t0 Éq.III.6
Le champ des moments dynamiques du centre de gravité
G par rapport à g0 est un torseur dynamique
dont la quantité d'accélération est la résultante.
G étant le centre de gravité de l'athlète de
masse m dans g0 et O un point quelconque.
Les éléments de réduction en O du
torseur gG à tout
instant sont :
§ la résultante dynamique (ou quantité
d'accélération) du centre de gravité par rapport
à
g0 définit par
~~ ~

R a0 =
maGg0
Éq.III.7
§ le moment dynamique du centre de gravité par
rapport à g0 au point O, définit par
~~~ ~~~~ ~
®1t( Oni) /
; = OG ? maG
Éq.III.8
| 

