3-Rigidite des segments du systeme poly-articule
Le problème de la rigidité des segments
lié aux mouvements de la peau par rapport à la structure osseuse
sous jacente est bien connu. Les erreurs engendrées diffèrent
d'un sujet à un autre et pour un même sujet d'un segment à
un autre. Ainsi, lors d'un geste ordinaire tel que la marche, le
pédalage ou la flexion extension d'un membre, les artefacts dus aux
mouvements de la peau peuvent entraîner des erreurs de positions pouvant
atteindre 50 mm [Capp 96]. Dans le cas de la présente étude, afin
de cerner l'amplitude de cette erreur, les longueurs segmentaires
relevées suite aux enregistrements statiques et
dynamiques (§- VII.2.1) sont confrontées afin d'estimer la
variation maximale et, de ce fait, l'erreur relative maximale due aux
mouvements de la peau (tableau 1).
Tableau 8 Variations maximales des longueurs
segmentaires et erreurs relatives
|
Segment
|
Longueur stat. [mm] Droit Gauche
|
Variation max.[mm] Droit Gauche
|
Erreur relative [%] Droit Gauche
|
|
Pied
|
132
|
|
136
|
25
|
|
23
|
19
|
|
17
|
|
Jambe
|
434
|
|
408
|
46
|
|
62
|
11
|
|
15
|
|
Cuisse
|
414
|
|
419
|
45
|
|
40
|
11
|
|
10
|
|
Pelvis
|
198
|
|
181
|
12
|
|
18
|
6
|
|
10
|
|
Abdo. + Thorax
|
|
517
|
|
|
26
|
|
|
5
|
|
|
Tête + Cou
|
|
271
|
|
|
12
|
|
|
4
|
|
|
Bras
|
325
|
|
300
|
22
|
|
20
|
7
|
|
7
|
|
Avant bras
|
285
|
|
279
|
29
|
|
17
|
10
|
|
6
|
|
Main
|
79
|
|
87
|
11
|
|
13
|
14
|
|
15
|
|
Cale pied
|
201
|
|
208
|
3
|
|
3
|
1
|
|
1
|
Cette confrontation des longueurs (tableau 1) permet de
distinguer deux types d'erreurs :
m la première est systématique, elle
témoigne de l'imprécision du positionnement des marqueurs entre
segments droits et gauches lors des enregistrements statiques.
m la deuxième est due aux mouvements relatifs des
marqueurs cutanés d'un même segment lors de l'exécution du
geste de départ.
Ces erreurs ont pour conséquence de biaiser le calcul
de la position et l'orientation des segments, ainsi que les paramètres
cinématiques et dynamiques qui en découlent. À ce titre,
en étudiant les amplitudes articulaires du genou lors de la course,
Reinschmidt et al. (1997) précisent que le mouvement de la peau
entraîne des erreurs d'estimation de l'ordre de 21% pour la
flexion/extension, 63% pour la rotation interne/externe et 70% pour
l'abduction/adduction [Rein 97]. De même, l'étude de Karlsson et
al. (1994) montre une différence de 30° lors de l'estimation de la
rotation médiolatéral de la cuisse (50° contre 20°)
à partir de la position de marqueurs cutanés versus
marqueurs fixés dans l'os (pins) [Karl 94].
Concernant l'effet des artéfacts dus aux mouvements de
la peau (ADMP) sur la dynamique articulaire, Holden et al. (1997) montrent que
pour différentes cadences de marche, la force et le couple articulaire
estimés au niveau du genou suivant l'axe de flexion, présentent
des erreurs pouvant atteindre respectivement 39 N et 9 Nm [Hold 97].
3.1-Méthodes de minimisation des ADMP
La peau étant un tissu mou qui se déforme selon
la posture du sujet, la variation de position d'un marqueur ne définit
pas seulement le mouvement du segment mais aussi celui de la peau par rapport
à l'os. Ainsi, suite à une contraction musculaire, il peut y
avoir une variation de la position d'un marqueur sans qu'il y ait mouvement
réel du segment osseux. De plus, à la différence des
mouvements cycliques, la gestuelle de départ du sprint ne
présente pas de déformations segmentaires
systématiques.
Le bruit provoqué par les ADMP représente donc
une source d'erreur qui n'est ni constante ni aléatoire. De ce fait,
puisqu'elle n'est pas constante et dépend de la nature du mouvement,
l'application des procédures d'offset ne permet pas de résoudre
le problème. Et, puisqu'elle n'est pas aléatoire et que sa
fréquence est approximativement celle du mouvement analysé, il
devient inadéquat d'adopter des techniques de traitement de
données telles que le
lissage45 ou le filtrage46. Ces deux
méthodes de traitement de données sont détaillées
dans une revue de bibliographie exposée par Leboeuf (2004) [Lebo 04].
Pour résoudre ce problème, et permettre une
application rigoureuse des principes de la mécanique des solides
rigides, il importe d'adopter la solution adéquate pour la minimisation
des ADMP. La littérature scientifique offre plusieurs issues telles que
l'utilisation de pins fixés directement dans l'os.
Néanmoins, étant invasive, son utilisation est très
limitée. Une alternative à cette méthode est le
cluster rigide sur lequel sont fixés les marqueurs et qui se
fixe à son tour sur la peau. Cette méthode permet de
réduire les ADMP, toutefois, tous les marqueurs se trouvent
entachés de la même erreur inconnue ce qui ne permet pas de
résoudre le problème. Alexander (2001) propose d'augmenter le
nombre de marqueurs collés sur un segment et de considérer que la
trajectoire de chacun ; par rapport à l'os sous-jacent ; est
entachée d'un bruit propre prédéfini suite à un
pré-test qui prend en compte la cinématique du geste
effectué [Alex 01]. Cette dernière méthode est
prédestinée aux gestes cycliques vu que les déformations
segmentaires sont considérées comme systématiques. Cela
exclut son utilisation dans le cas de l'étude de départ du
sprint. De plus, vu la position initiale de l'athlète, l'augmentation du
nombre de marqueurs se confronte à un autre type de problème :
celui des occlusions de marqueurs.
Methodes de minimisation des ADMP par
optimisation
Dans une optique de minimisation des ADMP par optimisation,
Chèze (1995) propose une méthode appelée
solidification [Chèz 95]. Cette méthode consiste
à conserver un triplet de marqueurs positionnés sur chaque
segment (§-VII.1.1) afin de le représenter par un triangle. La
description de la position et de l'orientation de ce triangle se fait suite
à la définition des matrices de roto-translation (§-VII.2).
Les triangles de référence sont définis en calculant les
moyennes des triangles les moins bruités déterminés suite
à une procédure itérative d'élimination.
Finalement, un ajustement par la méthode des moindres carrés est
effectué pour substituer à chaque instant un triangle rigide au
triangle déformé.
45 Le lissage est une technique de traitement de
données basée sur l'interpolation. Elle consiste à
remplacer une valeur numérique par celle qui apparaît le plus
fréquemment dans le voisinage.
46 Le filtrage est une technique de traitement de
données basée sur la notion de tri. Elle permet d'éliminer
les valeurs à hautes fréquence et de garder les autres et
inversement.
L'emploi de cette procédure d'optimisation par moindres
carrés permet de définir la matrice de rotation R et le
vecteur de translation t qui minimisent l'écart entre les
positions a et b des marqueurs i entre deux instants
voisins tel que :
n
min f = E R a i + t -bi
2 Éq.VII. 11


i =1
dont n est le nombre de marqueurs (n = 3) et
R est contraint tel que R TR = I et
det ( R) = 1
pour assurer l'orthogonalité de la matrice de rotation
et donc un déplacement qui correspond à celui d'un corps rigide.
Néanmoins, vu l'absence de contraintes articulaires entre les segments,
ces derniers peuvent présenter des amplitudes articulaires inattendues
voire même des ruptures de liaisons entre les segments voisins.
En effet, suite à l'application de cette
procédure de solidification aux données de départ du
sprint, des dislocations sont remarquées au niveau des articulations
constituant la chaîne cinématique. L'écart le plus
important est noté au niveau du genou droit (figure 81).
Un éloignement de 3,6 cm de l'origine du repère
fémur aFémur par rapport à l'axe
proximodistal du tibia est noté. Cette amplitude est
comparable à celle avancée dans Lu et O'Connor (1999) [Lu 99].
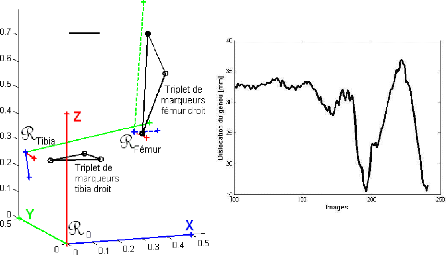
Vue 3D
Figure 81 Écartement de la position de l'origine
du repère fémur gFémur par rapport à
l'axe
proximodistal du tibia suite à l'application de la
procédure de solidification
proposée par Chèze 1995 aux
données du départ du sprint
Cette dislocation articulaire (figure 81) est due
principalement au traitement séparé des segments. Si cette
méthode a démontré l'efficacité de minimiser les
ADMP lors de gestes tels que la marche, il n'en est pas de même pour le
traitement d'un geste « explosif » tel que le départ de
sprint. De nombreuses études ont souligné l'effet
indésirable de cette méthode dans l'estimation des grandeurs
mécaniques. C'est pourquoi Lu et O'Connor (1999) ont introduit les
contraintes articulaires pour rechercher, à chaque image, la
configuration optimale de la chaîne cinématique. La solution
recherchée est celle qui minimise, à un instant donné, la
différence entre les coordonnées des marqueurs issues de la
mesure et celles redéfinies par le modèle rigide (figure 82). Le
problème d'optimisation s'écrit :
min f( q )= [P -
P( q) T W - ' (
P P q ) Éq.VII. 12
où q désigne les variables articulaires
décrivant la configuration de la chaîne cinématique, P
les coordonnées des marqueurs mesurés à une image
donnée et P' ( q ) les coordonnées du
modèle rigide à la même image. W
désigne la matrice de pondération. Cette matrice est
définie afin que le rôle de chaque marqueur soit identique ou afin
que certains marqueurs aient plus d'impact que d'autres [Lu 99].
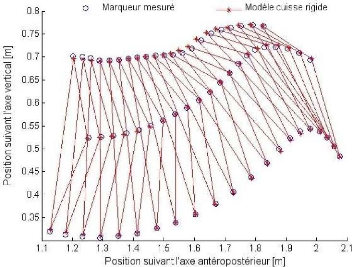
Figure 82 Ajustement du modèle rigide de la
cuisse droite aux positions mesurées des marqueurs du
même
segment aux mêmes instants. (Vue sagittale du coté
droit, représentation d'une image sur deux).
Application de la
procédure de solidification globale proposée dans Lu et O'Connor
(1999)
La figure 82 expose une partie de la chaîne
cinématique afin de montrer l'ajustement du modèle rigide de la
cuisse aux marqueurs mesurés suite à l'adoption de la
procédure de solidification globale.
L'ajustement du modèle rigide aux positions
mesurées de marqueurs permet de solidifier les segments de la
chaîne cinématique. Néanmoins, l'application de cette
procédure de solidification globale [Lu 99] modifie l'orientation des
segments et de ce fait la configuration de la chaîne. C'est ce que
démontre le paragraphe qui suit.
| 

