Contribution à la caractérisation mécanique des critères de qualités du départ de la course vitesse sur 100 m( Télécharger le fichier original )par Khalil Ben Mansour Université de Poitiers - Doctorat 2008 |

Annexes
1 Annexe Analyse en composantes principales Le tableau 1 ci-dessous présente les variables (p = 91) déterminées suites aux mesures dynamométriques réalisées lors de 92 essais de départ de sprint. Ces variables sont utilisées dans l'analyse en composantes principales. Tableau 1 Description des indices attribués aux variables issues des mesures dynamométriques Natures N° Indice Description Poids [N] 1 'Poids' Poids du sujet Temps [ms] 2 'dtLat' délai de latence 3 'dtImpul' durée d'impulsion 4 'tacMd' instants de la mise en action Mains droite 5 'tacMg' instants de la mise en action Mains gauche 6 'tac2M' instants de la mise en action les 2Mains 7 'tac2P' instants de la mise en action les 2Pieds 8 'tacPar' instants de la mise en action Pied arrière 9 'tacPav' instants de la mise en action Pied avant 10 'tFmaxMdX' instants de la Fx max Mains droite 11 'tFmaxMdZ' instants de la Fz max Mains droite 12 'tFmaxMgX' instants de la Fx max Mains gauche 13 'tFmaxMgZ' instants de la Fz max Mains gauche 14 'tFmax2Mx' instants de la Fx max 2Mains 15 'tFmax2Mz' instants de la Fz max 2Mains 16 'tFmaxParX' instants de la Fx max Pied arrière 17 'tFmaxParZ' instants de la Fz max Pied arrière 18 'tFmax2PX' instants de la Fx max 2Pieds 19 'tFmax2PZ' instants de la Fz max 2Pieds 20 'tFmaxPavX' instants de la Fx max Pied avant 21 'tFmaxPavZ' instants de la Fz max Pied avant 22 'tFmax4segX' instants de la Fx max 4segments 23 'tFmax4segZ' instants de la Fz max 4segments 24 'teMd' instants d'éjection Mains droite 25 'teMg' instants d'éjection Mains gauche 26 'te2M' instants d'éjection 2Mains 27 'tePar' instants d'éjection Pied arrière 28 'tePav' instants d'éjection Pied avant Forces [N] 29 '2M_statX' Force 2Mains statique suivant Ox 30 '2M_statZ' Force 2Mains statique suivant Oz 31 'Md_statX' Force Main droite statique suivant Ox 32 'Md_statZ' Force Main droite statique suivant Oz 33 'Mg_statX' Force Main gauche statique suivant Ox 34 'Mg_statZ' Force Main gauche statique suivant Oz 35 '2P_statX' Force 2Pieds statique suivant Ox 36 '2P_statZ' Force 2Pieds statique suivant Oz 37 'Par_statX' Force Pied arrière statique suivant Ox 38 'Par_statZ' Force Pied arrière statique suivant Oz 39 'Pav_statX' Force Pied avant statique suivant Ox 40 'Pav_statZ' Force Pied avant statique suivant Oz 41 '2M_maxX' Force 2Mains maximale suivant Ox 42 '2M_maxZ' Force 2Mains maximale suivant Oz 43 'Md_maxX' Force Main droite maximale suivant Ox 44 'Md_maxZ' Force Main droite maximale suivant Oz 45 'Mg_maxX' Force Main gauche maximale suivant Ox 46 'Mg_maxZ' Force Main gauche maximale suivant Oz 47 '2PmaxX' Force 2Pieds maximale suivant Ox 48 '2PmaxZ' Force 2Pieds maximale suivant Oz 49 'Par_maxX' Force Pied arrière maximale suivant Ox 50 'Par_maxZ' Force 2Pied arrière maximale suivant Oz 51 'Pav_maxX' Force Pied avant maximale suivant Ox 52 'Pav_maxZ' Force 2Pied avant maximale suivant Oz 53 'SFR_maxX' Somme des Forces de réaction 2Mains maximale suivant Ox 54 'SFR_maxy' Somme des Forces de réaction 2Mains maximale suivant Oy 55 'SFR_maxZ' Somme des Forces de réaction 2Mains maximale suivant Oz 56 Fx2P_te2M' Force 2Pieds suivant Ox à (te2M) 57 Fz2P_te2M' Force 2Pieds suivant Oz à (te2M) 58 'Fxpav_tepar' Force Pied av suivant Ox à (tepar) 59 'Fzpav_tepar' Force Pied av suivant Oz à (tepar) Vitesses [m/s] 60 Vxte2M' vitesse suivant Ox à (te2M) instant d'éjection des 2Mains 61 'Vxtepar' vitesse suivant Ox à (tepar) instant d'éjection du pied arrière 62 'Vxtepav' vitesse suivant Ox à (tepav) instant d'éjection du pied avant 63 Vyte2M' vitesse suivant Oy à (te2M) instant d'éjection des 2Mains 64 'Vytepar' vitesse suivant Oy à (tepar) instant d'éjection du pied arrière 65 'Vytepav' vitesse suivant Oy à (tepav) instant d'éjection du pied avant 66 Vzte2M' vitesse suivant Oz à (te2Mm) instant d'éjection des 2Mains 67 'Vztepar' vitesse suivant Oz à (tepar) instant d'éjection du pied arrière 68 'Vztepav' vitesse suivant Oz à (tepav) instant d'éjection du pied avant 69 NVte2M' Norme de V à (te2M) instant d'éjection des 2Mains 70 'NVtepar' Norme de V à (tepar) instant d'éjection du pied arrière 71 'NVtepav' Norme de V à (tepav) instant d'éjection du pied avant 72 'VxtFmax2P' Vitesse suivant Ox à (tFmax2P) instant de Fmax des 2Pieds Positions [m] 73 Oxte2M' déplacement suivant Ox à (te2M) instant d'éjection des 2Mains 74 'Oxtepar' déplacement suivant Ox à (tepar) instant d'éjection du pied arrière 75 'Oxtepav' déplacement suivant Ox à (tepav) instant d'éjection du pied avant 76 Oyte2M' déplacementsuivant Oy à (te2M) instant d'éjection des 2Mains 77 'Oytepar' déplacement suivant Oy à (tepar) instant d'éjection du pied arrière 78 'Oytepav' déplacement suivant Oy à (tepav) instant d'éjection du pied avant 79 Ozte2M' déplacement suivant Oz à (te2M) instant d'éjection des 2Mains 80 'Oztepar' déplacement suivant Oz à (tepar) instant d'éjection du pied arrière 81 'Oztepav' déplacement suivant Oz à (tepav) instant d'éjection du pied avant 82 NOCG_te2M' Norme du déplacement à (te2M) instant d'éjection des 2Mains 83 'NOCG_tepar' Norme du déplacement V à (tepar) instant d'éjection du pied arr. 84 'NOCG_tepav' Norme du déplacement à (tepav) instant d'éjection du pied avant Angles [deg] 85 ieta_te2M' angle à (te2M) instant d'éjection des deux mains 86 ieta_tFmax2PX' angle à (tFmax2PX) instant de Fx max des deux pieds 87 ieta_tFmax2PZ' angle à (tFmax2PZ) instant de Fz max des deux pieds 88 ieta_tePar' angle à (tePar) instant d'éjection du pied arrière 89 ieta_tFmaxPavX' angle à (tFmaxPavX) instant de Fx max Pied avant 90 ieta_tFmaxPavZ' angle à (tFmaxPavZ) instant de Fz max Pied avant 91 ieta_tePav' angle à (tePav) instant d'éjecton Tableau 2 Paramètres descriptifs des variables
issues de 92 mesures dynamométriques Natures Dans le tableau 2, les paramètres statistiques descriptifs sont calculés en prenant en compte l'ensemble des essais (m = 92) de départ de sprint. Les temps sont référencés par rapport à l'instant de mise en action déterminés suite à la mesure de la somme des forces.
Poids [N]
Les Temps [ms] Les Forces [% Folds] N°
Les Vitesses [m/s] Les Positions [m] Les Angles [deg]
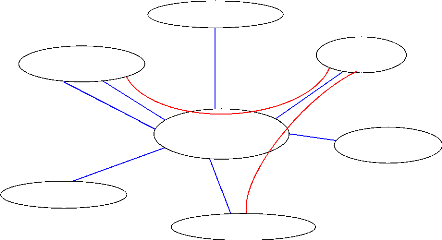
La confrontation simultanée des 91 variables permet de définir la matrice des corrélations exprimées dans le tableau 3. Dans le triangle inférieur de cette matrice sont exprimés les seuls éléments significatifs (p < 0,05). Tableau 3 Matrice des corrélations entre toutes les variables présentées en six parties
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 1 1 -0,2 -0,1 -0,1 0,1 0,13 -0 -0,1 0,17 0,02 0,12 0,1 -0 0,12 0,04 -0 -0 -0 -0,1 -0,1 -0,1 -0,1 0,17 0,3 0,1 0,14 0 -0,1 0,04 0,3 2 0 1 0,04 -0,1 -0,3 -0,4 -0,3 -0,1 -0,5 0,07 0 -0,1 -0,3 -0,1 -0,1 0,01 -0 0,02 0,1 0,01 0,01 -0,1 0,13 0,04 -0,1 -0 0,03 0,04 -0 -0,2 3 0 0 1 0,38 0,38 0,27 -0 0,1 0,02 0,28 -0,1 0,25 0,08 0,01 0,05 0,7 0,68 0,8 0,6 0,95 0,96 0,5 0,35 0,5 0,46 0,54 0,7 1 0,17 -0,5 4 0 0 0 1 0,06 0,36 0,09 0,13 0,12 0,28 -0,1 0,04 0,02 0,07 -0 0,26 0,21 0,32 0,21 0,33 0,37 0,33 0,06 0,26 0,48 0,4 0,23 0,38 0,1 -0,2 5 0 0 0 0 1 0,64 0,22 -0,1 0,35 0,19 -0,1 0,23 0,03 -0,2 0,09 0,43 0,43 0,43 0,17 0,4 0,39 0,21 0,26 0,27 0,18 0,26 0,41 0,38 -0,1 -0,4 6 0 0 0 0 0 1 0,37 0,07 0,32 0,14 -0,2 0,13 0,07 -0,1 0,07 0,24 0,19 0,33 0,02 0,29 0,31 0,25 -0 0,13 0,23 0,19 0,21 0,27 0,07 -0,3 7 0 0 0 0 0 0 1 0,57 0,56 0,06 0,25 0,29 -0 0,14 0,05 0,18 0,14 0,07 0,17 -0 -0 0,12 0,03 0,23 0,24 0,25 -0,1 -0 0,08 0,27 8 0 0 0 0 0 0 0 1 0,21 0,07 0,25 0,27 0,13 0,23 0,14 0,24 0,22 0,14 0,3 0,14 0,15 0,16 -0 0,22 0,23 0,25 0,07 0,1 0,31 0,27 9 0 0 0 0 0 0 0 0 1 0,12 0,27 0,23 0,31 0,22 0,32 0,39 0,38 0,21 0,27 0,05 0,05 0,12 0,16 0,33 0,34 0,31 0,19 0,02 -0,1 0,23 10 0 0 0 0 0 0 0 0 0 1 0,13 0,28 0,08 -0,1 0,06 0,31 0,28 0,27 0,24 0,25 0,31 0,12 0,29 0,41 0,41 0,45 0,18 0,28 -0,3 -0,1 11 0 0 0 0 0 0 0 0 0 0 1 0,19 0,29 0,52 0,47 0,14 0,08 -0,1 0,12 -0,1 -0 -0,2 -0,1 0,31 0,15 0,16 -0,1 -0,1 -0,1 0,41 12 0 0 0 0 0 0 0 0 0 0 0 1 0,08 0,1 0,1 0,41 0,31 0,27 0,28 0,25 0,26 0,12 0,2 0,47 0,37 0,47 0,15 0,25 -0,1 -0 13 0 0 0 0 0 0 0 0 0 0 0 0 1 0,47 0,82 0,19 0,12 0,12 0,03 0,13 0,16 0,09 -0,1 0,15 0,11 0,06 0,03 0,08 -0,1 0,2 14 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,48 0,1 0,03 -0,1 0,15 -0 0,02 0,03 -0,1 0,31 0,18 0,17 -0,1 0,01 0,17 0,42 15 0 0 0 0 0 0 0 0 0 0 0 0 0,82 0 1 0,21 0,11 0,07 -0 0,08 0,11 -0,1 -0,3 0,16 0,04 0,02 -0 0,05 -0,1 0,27 16 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,89 0,71 0,7 0,71 0,7 0,24 0,43 0,56 0,55 0,58 0,8 0,7 -0 -0,3 17 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,89 1 0,73 0,75 0,7 0,67 0,29 0,51 0,53 0,5 0,53 0,83 0,68 0,01 -0,3 18 0 0 0,8 0 0 0 0 0 0 0 0 0 0 0 0 0,71 0,73 1 0,64 0,78 0,75 0,48 0,42 0,54 0,47 0,55 0,71 0,8 0,1 -0,5 19 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,7 0,75 0 1 0,54 0,53 0,48 0,54 0,58 0,66 0,69 0,6 0,6 0,2 -0,1 20 0 0 0,95 0 0 0 0 0 0 0 0 0 0 0 0 0,71 0,7 0,78 0 1 0,97 0,43 0,32 0,43 0,37 0,43 0,74 0,95 0,11 -0,6 21 0 0 0,96 0 0 0 0 0 0 0 0 0 0 0 0 0,7 0 0,75 0 0,97 1 0,45 0,32 0,48 0,41 0,49 0,69 0,96 0,1 -0,5 22 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,39 0,39 0,48 0,54 0,13 0,5 0,27 -0,1 23 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,6 0,48 0,58 0,4 0,35 -0 -0,1 24 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,66 0,83 0,36 0,5 -0 0,1 25 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,93 0,31 0,46 0,05 0,05 26 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,83 0,93 1 0,34 0,54 0,04 0,02 27 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,8 0,83 0,71 0 0,74 0 0 0 0 0 0 1 0,7 0,02 -0,6 28 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,8 0 0,95 0,96 0 0 0 0 0 0 1 0,17 -0,5 29 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,17 30 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 31 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,93 0 32 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,91 33 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,93 0 34 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,76 35 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -0,9 0 36 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 37 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -0,7 0 38 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 39 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 40 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -0,9 41 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -0,9 0 42 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,88 43 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 44 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,72 45 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 1 0,13 0,37 -0,1 0,09 0,03 -0,3 0,1 -0,2 -0,1 -0,2 -0,1 0,18 0,46 0,26 0,06 2 -0,1 -0,2 0,05 -0,1 -0,1 0,15 -0,2 0,19 0,15 0,07 0,06 -0,1 -0,1 -0,1 -0,2 3 0,14 -0,5 0,17 -0,4 -0,2 0,54 -0,4 -0 0,22 0,59 -0,1 -0,4 -0,1 -0,3 0,04 4 0,08 -0,2 0,1 -0,1 -0,1 0,21 -0,1 -0 -0 0,22 -0,1 -0,3 -0,3 -0,5 0,15 5 -0 -0,3 -0,1 -0,5 0,09 0,44 -0,1 0,03 0,31 0,46 -0,1 -0,4 0,19 -0,1 -0,2 6 0,12 -0,2 -0 -0,3 0,03 0,27 0 -0,1 0,06 0,34 -0,2 -0,3 -0 -0,2 0,01 7 0,21 0,29 -0,1 0,13 0,04 -0,3 0,21 -0,1 -0,3 -0,2 -0,2 0,26 0,24 0,36 -0,1 8 0,36 0,24 0,22 0,2 -0,2 -0,3 -0,1 -0,2 -0,3 -0,2 -0,3 0,36 0 0,33 -0,1 9 0,01 0,27 -0,3 0,07 0,3 -0,2 0,36 0,03 -0 -0,3 0,07 0,27 0,42 0,33 -0,1 10 -0,2 -0,1 -0,2 -0,2 0,23 0,12 0,14 0,1 0,21 0,08 0,21 -0,1 -0 -0 -0,1 11 -0 0,42 -0,2 0,24 0,21 -0,4 0,31 -0 -0,1 -0,4 0,27 0,6 0,43 0,58 -0,1 12 0,03 0,12 -0,2 -0,2 0,23 -0 0,16 0,01 0,17 -0 0,07 0,08 0,18 0,25 -0,3 13 0,02 0,22 -0,1 0,09 0,15 -0,2 0,15 -0,1 0,04 -0,2 0,2 0,4 0,18 0,26 0,08 14 0,25 0,41 0,06 0,29 -0,1 -0,4 -0 -0,2 -0,2 -0,4 0,09 0,52 0,34 0,38 0,17 15 0,02 0,29 -0,2 0,13 0,14 -0,3 0,19 -0,2 -0 -0,2 0,22 0,5 0,3 0,41 -0 16 0,04 -0,3 -0,1 -0,2 0,03 0,32 -0,1 0,03 0,26 0,33 0,03 -0,1 0,14 -0 -0,1 17 -0 -0,3 0,02 -0,2 -0 0,33 -0,2 -0 0,28 0,35 0,01 -0,1 0,08 -0,1 -0,1 18 0,1 -0,4 0,08 -0,4 -0,1 0,47 -0,2 0,01 0,19 0,49 -0,1 -0,3 0,01 -0,2 -0,1 19 0,2 -0,1 0,17 0,03 -0,2 0,09 -0,2 0 -0 0,1 -0,1 0,01 0,04 -0 0,03 20 0,09 -0,5 0,12 -0,4 -0,1 0,57 -0,3 0,02 0,25 0,6 -0 -0,4 -0,1 -0,3 -0 21 0,09 -0,5 0,1 -0,4 -0,1 0,53 -0,3 0,01 0,23 0,56 -0 -0,4 -0,1 -0,3 -0 22 0,24 -0,1 0,26 -0,1 -0,3 0,11 -0,3 -0,1 -0,1 0,18 -0,3 -0,2 -0,1 -0,2 -0 23 -0,1 -0,1 -0 -0,1 -0 0,12 -0,1 0,17 0,15 0,05 0,04 -0,1 0,19 -0 0,05 24 0,05 0,21 -0,1 -0,1 0,05 -0,1 0,06 0,01 0 -0,1 0,15 0,16 0,44 0,28 -0 25 0,12 0,01 -0 0,11 -0 -0,1 -0 -0 -0 -0 0 0,02 0,07 -0,1 0,14 26 0,11 0,05 -0 -0 -0 -0 -0 0,01 -0 -0 0,02 0,01 0,19 0,05 0,07 27 0 -0,5 0,04 -0,4 -0 0,56 -0,2 0,14 0,34 0,53 0,01 -0,4 -0 -0,3 -0 28 0,14 -0,5 0,17 -0,4 -0,2 0,54 -0,4 -0 0,22 0,59 -0,1 -0,4 -0,1 -0,3 0,04 29 0,93 0,03 0,93 0,32 -0,9 -0,2 -0,7 -0,6 -0,5 0,08 -0,9 0,06 -0,2 -0,1 0,4 30 0,26 0,91 0,05 0,76 -0,1 -1 0,27 -0,4 -0,6 -0,9 -0,1 0,88 0,4 0,72 0,13 31 1 0,14 0,73 0,36 -0,8 -0,3 -0,5 -0,5 -0,6 -0 -0,8 0,18 0,03 0,08 0,3 32 0 1 -0,1 0,43 0,07 -0,9 0,38 -0,3 -0,5 -0,8 0,01 0,82 0,53 0,82 -0 33 0,73 0 1 0,24 -0,9 -0 -0,8 -0,5 -0,5 0,17 -0,8 -0,1 -0,3 -0,2 0,44 34 0 0 0 1 -0,3 -0,8 -0 -0,3 -0,6 -0,6 -0,2 0,65 0,05 0,28 0,31 35 -0,8 0 -0,9 0 1 0,08 0,85 0,55 0,47 -0,2 0,78 0,05 0,21 0,18 -0,4 36 0 -0,9 0 -0,8 0 1 -0,3 0,35 0,61 0,9 0,09 -0,9 -0,4 -0,7 -0,1 37 0 0 -0,8 0 0,85 0 1 0,5 -0,1 -0,5 0,62 0,33 0,27 0,38 -0,3 38 0 0 0 0 0 0 0 1 0,19 -0,1 0,5 -0,3 -0,1 -0,2 -0,1 39 0 0 0 0 0 0 0 0 1 0,56 0,44 -0,5 -0,1 -0,3 -0,4 40 0 -0,8 0 0 0 0,9 0 0 0 1 -0,1 -0,8 -0,4 -0,7 -0,1 41 -0,8 0 -0,8 0 0,78 0 0 0 0 0 1 0,1 0,23 0,12 -0,2 42 0 0,82 0 0 0 -0,9 0 0 0 -0,8 0 1 0,49 0,85 0,03 43 0 0 0 0 0 0 0 0 0 0 0 0 1 0,66 -0,1 44 0 0,82 0 0 0 -0,7 0 0 0 0 0 0,85 0 1 -0,3 45 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
3ème partie de la matrice des corrélations
4ème partie de la matrice des corrélations 0 0 0 0 0 0 0 0 0 0 0 210
6ème partie de la matrice des corrélations 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 46 -0,2 0 -0,1 -0,1 0,12 -0,1 -0,1 -0 -0 -0,2 0 -0,4 -0 -0,3 -0,4 -0,1 -0,1 0,03 0,15 -0,2 -0,2 0,03 -0,3 -0,4 -0 0,39 0,11 0,11 -0 -0 0,01 47 0,7 0,67 -0,2 -0,3 -0,1 0,24 0,23 0,27 0,31 0,68 0,68 0,15 -0,1 0,44 0,28 -0,2 -0,3 -0,2 -0,2 0,17 0,05 -0,2 0,38 0,26 -0 -0,1 -0,1 -0,5 0,03 0,04 0,19 48 0,62 -0 0,1 -0,1 -0,3 0,47 0,58 0,51 -0 0,67 0,03 0,31 -0,4 0,55 0,24 0,21 0,18 -0,1 -0,2 0,59 0,54 -0,4 0,62 0,35 0,49 -0,1 0,08 -0,1 0,4 0,44 0,52 49 0,85 0,46 -0 -0,1 -0,1 0,28 0,29 0,31 0,25 0,83 0,47 0,32 -0,1 0,69 0,37 -0,1 -0,1 -0,1 -0,3 0,37 0,17 -0,2 0,64 0,37 0,08 -0,2 -0,2 -0,5 0,11 0,12 0,26 50 0,77 0,16 0,14 0,13 -0,1 0,34 0,36 0,47 0,13 0,77 0,18 0,38 -0,2 0,65 0,23 0,11 0,13 0,01 -0,3 0,46 0,31 -0,3 0,66 0,28 0,25 -0,2 -0,1 -0,4 0,3 0,31 0,46 51 0,03 0,76 -0,4 -0,4 0,16 -0,1 -0,3 0,03 0,33 -0 0,75 -0,3 0,16 -0,2 0,01 -0,4 -0,4 -0,1 -0,1 -0,4 -0,4 0,08 -0,3 -0,1 -0,4 0,1 -0 -0,2 -0,3 -0,3 -0,1 52 0,01 0,13 0,12 0,09 -0,2 0,06 -0 0,55 -0,2 0,01 0,17 -0,2 -0,4 -0,1 -0,1 0,15 0,16 -0,1 -0,2 0,03 0,15 -0,4 -0,1 -0,1 0,22 0,17 0,16 -0,1 0,24 0,23 0,54 53 0,63 0,73 -0,3 -0,4 -0,1 0,19 0,17 0,22 0,39 0,61 0,74 0,03 0,02 0,35 0,24 -0,3 -0,3 -0,2 -0,2 0,05 -0 -0,1 0,27 0,2 -0,1 -0 -0,1 -0,4 0,01 0,01 0,13 54 -0,3 -0 0,36 0,49 0,47 -0,3 -0,4 -0,2 -0 -0,3 -0,1 -0,1 0,15 -0,2 -0,2 0,1 0,22 0,6 0,01 -0,3 -0,3 0,14 -0,3 -0,3 -0,3 -0 -0,1 -0 -0,3 -0,3 -0,2 55 0,24 0,34 -0,2 -0,2 0,05 0,68 0,51 0,14 0,43 0,3 0,35 -0,1 0,06 0,17 0,24 -0,2 -0,2 -0 0,33 0,34 0,28 0,17 0,23 0,29 0,37 0,53 0,6 0,23 -0 -0 0,12 56 0,76 0,64 -0,1 -0,3 -0,1 0,25 0,29 0,3 0,13 0,75 0,65 0,19 -0,2 0,54 0,38 -0,2 -0,2 -0,2 -0,3 0,32 0,18 -0,3 0,51 0,38 0,12 -0 -0,1 -0,4 0,08 0,09 0,23 57 0,59 -0 0,28 0,02 -0,2 0,22 0,46 0,5 -0,3 0,62 0 0,28 -0,5 0,55 0,25 0,26 0,25 -0,1 -0,4 0,54 0,52 -0,6 0,61 0,35 0,46 -0,2 -0,1 -0,2 0,45 0,47 0,51 58 -0,1 0,6 -0,4 -0,4 0,16 -0,2 -0,3 0,01 0,4 -0,1 0,6 -0,4 0,21 -0,4 -0,2 -0,4 -0,4 -0,1 -0,1 -0,6 -0,4 0,14 -0,5 -0,3 -0,6 0,01 -0,2 -0,2 -0,1 -0,1 -0,1 59 -0,2 -0,1 -0,1 -0,1 -0 -0,4 -0,2 0,35 -0,1 -0,2 -0,1 -0,3 -0,1 -0,3 -0,4 0,08 -0 -0,1 -0,3 -0,4 -0,1 -0,2 -0,4 -0,4 -0,4 -0,2 -0,4 0 0,48 0,48 0,34 60 0,17 0,49 -0,2 -0 0,27 -0 -0,1 -0,2 0,91 0,13 0,47 0,06 0,82 0,11 0,15 -0,3 -0,3 0,12 0,2 -0,4 -0,4 0,72 -0,1 0,03 -0,7 -0,3 -0,3 -0,3 -0,2 -0,2 -0,2
61 1 0,5 0,04 -0 -0,2 0,39 0,41 0,32 0,3 0,99 0,5 0,55 -0 0,91 0,6 0,01 0,01 -0,1 -0,2 0,58 0,32 -0,1 0,87 0,61 0,14 -0,3 -0,2 -0,6 0,13 0,14 0,25 62 0 1 -0,3 -0,3 0,04 0,14 0,05 0,14 0,49 0,46 1 0,11 0,19 0,3 0,57 -0,3 -0,3 -0,1 -0,1 -0 -0,1 0,08 0,21 0,5 -0,3 -0,1 -0,1 -0,4 -0,2 -0,2 0 63 0 0 1 0,83 -0 0,01 0,03 0,1 -0,1 0,04 -0,3 0,22 -0,1 0,11 0,03 0,78 0,88 0,54 -0 0,16 0,14 -0 0,16 0,05 0,15 -0,1 -0,1 0 0,11 0,11 0,13 64 0 0 0,83 1 0,25 -0 -0,1 -0 -0 -0,1 -0,3 0,2 0,03 0,06 -0,1 0,65 0,77 0,72 0,09 0,09 0,03 0,09 0,09 -0,1 0,03 -0,1 -0,1 -0 0,02 0,02 0,02 65 0 0 0 0 1 -0,2 -0,3 -0,3 0,17 -0,2 0,01 -0,1 0,33 -0,1 -0,1 -0,4 -0,2 0,81 -0,1 -0,3 -0,4 0,25 -0,2 -0,2 -0,3 -0,1 -0,1 0,01 -0,3 -0,3 -0,3 66 0 0 0 0 0 1 0,87 0,41 0,37 0,5 0,17 0,21 -0,1 0,34 0,35 0,13 0,11 -0,1 0,6 0,77 0,77 0,11 0,52 0,51 0,72 0,53 0,66 0,36 0,35 0,36 0,41 67 0 0 0 0 0 0,87 1 0,54 0,2 0,55 0,09 0,15 -0,3 0,36 0,29 0,13 0,1 -0,2 0,45 0,78 0,87 -0,1 0,54 0,48 0,72 0,47 0,54 0,45 0,56 0,56 0,55 68 0 0 0 0 0 0 0 1 -0 0,39 0,22 -0,1 -0,5 0,12 -0 0,24 0,19 -0,1 -0 0,38 0,69 -0,4 0,23 0,13 0,39 0,28 0,19 0,12 0,85 0,85 0,99 69 0 0 0 0 0 0 0 0 1 0,31 0,49 0,13 0,71 0,22 0,27 -0,2 -0,2 0,08 0,42 -0 -0,1 0,73 0,14 0,23 -0,4 -0 -0 -0,1 -0,1 -0,1 -0,1 70 0,99 0 0 0 0 0 0 0 0 1 0,48 0,53 -0 0,9 0,6 0,03 0,03 -0,2 -0,1 0,67 0,44 -0,1 0,89 0,64 0,25 -0,2 -0,1 -0,5 0,22 0,23 0,33 71 0 1 0 0 0 0 0 0 0 0 1 0,09 0,15 0,29 0,56 -0,3 -0,3 -0,1 -0,1 -0 -0 0,05 0,21 0,5 -0,2 -0 -0,1 -0,4 -0,1 -0,1 0,08 72 0 0 0 0 0 0 0 0 0 0 0 1 0,2 0,69 0,56 0,07 0,14 0,03 0,03 0,45 0,14 0,14 0,66 0,53 0,13 -0,6 -0,2 -0,4 -0,2 -0,2 -0,2 73 0 0 0 0 0 0 0 0 0,71 0 0 0 1 0,15 0,21 -0,3 -0,3 0,18 0,28 -0,3 -0,5 0,91 -0 0,07 -0,6 -0,4 -0,4 -0,2 -0,5 -0,5 -0,5 74 0,91 0 0 0 0 0 0 0 0 0,9 0 0 0 1 0,69 0,01 0,05 -0 -0,1 0,64 0,3 0,02 0,96 0,69 0,16 -0,4 -0,2 -0,5 -0 -0 0,08 75 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 -0 -0 -0,1 0,05 0,47 0,28 0,14 0,67 0,97 0,14 -0,2 0 -0,3 -0,3 -0,2 -0,1 76 0 0 0,78 0 0 0 0 0 0 0 0 0 0 0 0 1 0,96 0,21 0,06 0,24 0,31 -0,2 0,11 0,04 0,28 0,04 -0 0,1 0,31 0,32 0,26 77 0 0 0,88 0,77 0 0 0 0 0 0 0 0 0 0 0 0,96 1 0,36 0,05 0,26 0,28 -0,2 0,14 0,05 0,28 0,01 0,02 0,07 0,24 0,24 0,23 78 0 0 0 0,72 0,81 0 0 0 0 0 0 0 0 0 0 0 0 1 -0,1 -0,1 -0,2 0,15 -0,1 -0,1 -0,2 -0,1 -0,1 0,01 -0,2 -0,2 -0,1 79 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,34 0,41 0,62 0,03 0,15 0,28 0,51 0,49 0,57 0,14 0,14 0,01 80 0 0 0 0 0 0,77 0,78 0 0 0 0 0 0 0 0 0 0 0 0 1 0,83 -0,2 0,83 0,63 0,79 0,27 0,43 0,1 0,35 0,37 0,39 81 0 0 0 0 0 0,77 0,87 0 0 0 0 0 0 0 0 0 0 0 0 0,83 1 -0,2 0,52 0,51 0,8 0,45 0,51 0,42 0,72 0,73 0,7 82 0 0 0 0 0 0 0 0 0,73 0 0 0 0,91 0 0 0 0 0 0 0 0 1 -0,1 0,08 -0,4 -0,1 -0,1 0,09 -0,3 -0,3 -0,4 83 0,87 0 0 0 0 0 0 0 0 0,89 0 0 0 0,96 0 0 0 0 0 0,83 0 0 1 0,72 0,41 -0,2 0,01 -0,4 0,12 0,14 0,21 84 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,97 0 0 0 0 0 0 0 0,72 1 0,33 -0,1 0,14 -0,2 -0 -0 0,05 85 0 0 0 0 0 0,72 0,72 0 0 0 0 0 0 0 0 0 0 0 0 0,79 0,8 0 0 0 1 0,54 0,71 0,47 0,39 0,4 0,44 86 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,79 0,64 0,28 0,27 0,31 87 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,71 0,79 1 0,65 0,16 0,15 0,22 88 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,32 0,31 0,19 89 0 0 0 0 0 0 0 0,85 0 0 0 0 0 0 0 0 0 0 0 0 0,72 0 0 0 0 0 0 0 1 1 0,88 90 0 0 0 0 0 0 0 0,85 0 0 0 0 0 0 0 0 0 0 0 0 0,73 0 0 0 0 0 0 0 1 1 0,88 91 0 0 0 0 0 0 0 0,99 0 0 0 0 0 0 0 0 0 0 0 0 0,7 0 0 0 0 0 0 0 0,88 0,88 1 1.1-Etude de regression lineaire Des études de régression linéaire sont effectuées afin de rechercher une éventuelle relation de la forme y = f(x) entre deux variables ( x et y ). La relation recherchée entre x et y est affine ( y = ax + b), elle consiste à rechercher une droite qui s'ajuste le mieux possible à l'ensemble des grandeurs. Cette droite rend minimale la somme des carrées des écarts des grandeurs y à la droite y = ax + b . C'est suite à l'exploitation du principe des moindres carrées, qu'il devient possible de trouver les valeurs de a et b qui minimisent la somme : n ( yi - (axi + b)) 2 i=0 La qualité de la régression peut être évaluée en calculant le coefficient de détermination (R2) qui est le carré du coefficient de corrélation linéaire (R). Ce dernier est un nombre compris entre 0 et +1, qui vaut +1 si les points du nuage sont exactement alignés sur la droite. Cela traduit l'existence d'une parfaite corrélation entre les grandeurs étudiées. 1.2-Standardisation des donnees : Centrage - Reduction Avant d'effectuer l'ACP, le tableau de données (n x p) est standardisé ou transformé. Cette transformation comporte deux étapes : le centrage puis la réduction. Le centrage consiste à soustraire la moyenne de la variable en cause à chaque valeur numérique. Le tableau obtenu est alors de terme général. Centrage : p i' = pik - pk Cette transformation n'a aucune incidence sur les définitions de la ressemblance entre individus et de la liaison entre variables. L'ACP peut être réalisée sur des données uniquement centrées. Toutefois, ces résultats sont alors très sensibles au choix des unités de mesures. La façon classique de s'affranchir de l'arbitraire de ces unités est de réduire les données : 1 p 1 (p ik p
Réduction : i p ' = : =
Suite à la standardisation des données, toutes les variables présentent la même variabilité et de ce fait la même influence dans le calcul des distances entre individus. Tableau 4 Valeurs propres, pourcentage d'inertie et pourcentage cumulé
Tableau 5 Corrélations entre les variables avec
les dix premiers axes principaux (CP).
Annexe 2 Cahier des charges des blocs de depart Sommaire 1-Analyse fonctionnelle 1.1-Contrôle de validité 1.2-Définition des fonctions 2-Caractéristiques des blocs de départ homologués 1-Analyse fonctionnelle Afin de cerner les propriétés des starting blocs instrumentés une analyse fonctionnelle est réalisée en s'appuyant sur des méthodes simples de gestion de projet. La Bête à cornes (figure 99) est un des outils de représentation permettant d'effectuer une analyse fonctionnelle pour identifier le besoin satisfait par le système en se posant les questions suivantes : - À qui rendre service ? - Sur quoi agit le système ? - Dans quel but ? (fonction d'usage ou besoin)
Sur quoi agit A qui rend service Dans quel but le Prise de décision de l'entraîneur Figure 99 Bête à cornes Entraîneur Consignes Athlète Efforts Feedback Starting-block 1.1-Controle de validite Un contrôle de validité du besoin est ensuite effectué en répondant aux trois questions suivantes : Raison But Pourquoi existe Incapacité d'apprécier un geste très Dissocier les efforts exercés au t-il ? rapide niveau de chaque pied Peut-il Parce que les efforts au niveau des Évaluer les variations de la vitesse et évoluer ? mains ne sont pas considérés de la position du centre de gravité
1.2-Definition des fonctions Les fonctions des blocs de départ instrumentés sont de deux catégories : principale et secondaire. Le premier objectif du développement de cet instrument est de mesurer sélectivement les efforts qui sont exercés sur les blocs.
Environnement FC1 Athlète Dynamomètre FP2 FC4 FC6 FC5 Blocs de départ instrumentés Maintenance F FC7 Règlementation FC3 FP1 Piste d'athlétisme Figure 100 Détermination des fonctions
principales (FP) et fonctions secondaires (FC) Fonctions Principales : FP1 : Isoler les efforts du sol FP2 : Mesurer les efforts de l'athlète et transmettre les données au logiciel Fonctions Secondaires : FC1 : Isolation et résistance à l'usure F : Respecter la réglementation de l'IAAF FC3 : Doit être fixé au sol FC4 : Être adapté à tous les athlètes FC5 : Prévoir le passage des fils FC6 : Alimentation des ponts de jauges FC7 : Faciliter l'entretient et la réparation Fonctions Origine But Évolution / Disparition FP1 Le pied ne doit pas toucher le sol Pour mesurer le torseur réel Que les efforts sur le sol soient négligeables
FC3 L'implantation du starting-block est Pour préserver la piste d'athlétisme /// normalisée
FC5 Les fils doivent être protégés Pour que l'environnement de Infrarouge, ... l'athlète soit sûr FC6 Le fonctionnement du capteur en dépend Pour alimenter les ponts de jauges /// FC7 Le capteur ou d'autres pièces peuvent être Pour améliorer la durée de vie Si rien ne peut tomber en panne en panne ou cassés 2-Caracteristiques des blocs de depart homologues D'après la règle 161 instaurée par l'IAAF les blocs de départ doivent être conformes aux caractéristiques générales suivantes :
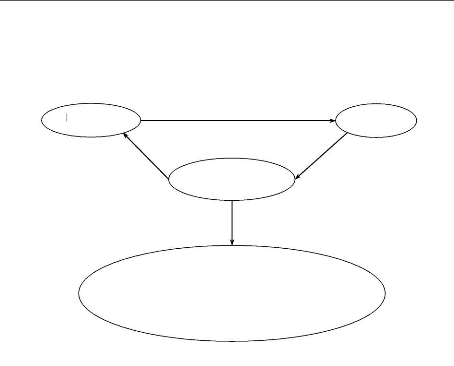
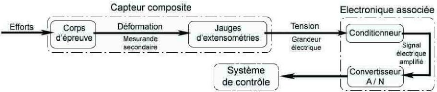
Annexe 3 Chaine de mesure dynamométrique Sommaire 1-Principes de la métrologie 2-Mise au point d'un capteur composite 2.1-Propriétés mécaniques du corps d'épreuves 2.2-Principe de jauges de déformation 2.3-Conditionnement et acquisition des signaux 1-Principes de la metrologie L'évaluation des forces repose sur la mesure de leurs conséquences qui se traduit par le changement de l'état du système c'est-à-dire sa déformation et/ou la variation de sa position. Lors de notre étude, l'évaluation des actions mécaniques au cours du départ de sprint est assurée suite à l'exploitation de deux principes, celui de la piézoélectricité et celui de l'extensométrie. Principe de piézoélectricité : découvert par Jacques et Pierre Curie en 1880, désigne la propriété qu'ont certain matériaux de développer une charge électrique proportionnelle à la contrainte qui leur est appliquée, et inversement de se déformer en fonction du champ électrique. Le phénomène de piézoélectricité consiste en l'apparition d'une polarisation déjà existante dans certains diélectriques anisotropes naturels ou artificiels. Le quartz est le plus connu, certain matériaux céramiques ferroélectriques génèrent aussi des différences de potentiel lorsqu'ils sont soumis à des contraintes. Les applications de ce principe sont nombreuses et diverses, elles s'étendent jusqu'aux domaines de l'électronique, de l'électroacoustique et bien entendue de la métrologie. Cette dernière application est à l'origine du fonctionnement des capteurs équipant les plates de formes de forces Kistler (Type 9281B et 9287B) utilisées au cours de nos expérimentations. Principe d'extensométrie : les capteurs utilisés sont dits passifs, se sont des jauges résistives qui traduisent en variation de résistance leur propre déformation qui est en principe proportionnelle à celle de la structure à l'endroit où elles sont collées. Leur domaine de mesure est basé sur le principe de l'élasticité linéaire qui représente le domaine dans lequel la relation entre force et déformation est linéaire et réversible. C'est une région de la relation entre force et déplacement correspondant à de faibles déformations. La connaissance des déformations sert à calculer les contraintes lorsque les lois qui lient ces grandeurs sont connues. Les capteurs composites (3D) développés reposent sur ce principe. 2-Mise au point d'un capteur composite La mise au point d'un tel outil métrologique nécessite l'utilisation de moyens sophistiqués tant dans le domaine de l'extensométrie que celui de l'électronique. L'expérience de notre équipe dans le domaine de l'extensométrie ainsi que la proximité d'un atelier d'électronique ont favorisé le développement d'un capteur composite. Le principe de la chaîne de mesure développée est résumé dans la figure ci-dessous (figure 101). Les détails de fonctionnement de cette chaîne sont effectués à la suite.
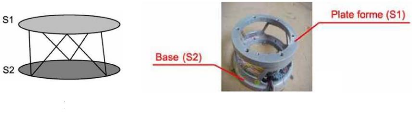
Figure 101 Schéma du principe d'une chaîne de mesure 2.1-Proprietes mecaniques du corps d'epreuve La conception du corps d'épreuve destiné à instrumenter les blocs de départ repose sur le principe de la plate forme de Stewart qui représente un mécanisme parallèle à six degrés de liberté très bien connue des roboticiens et des constructeurs d'hexapodes. Ce type de corps d'épreuve a été développé par la première fois en 1983 par Gaillet [Gail 83]. De forme cylindrique, il est composé d'une plate forme (S1), une base (S2), et six poutres en liaison rotule avec S1 et S2 (figure 102).
(a) (b) Figure 102 (a) Schéma reprenant l'allure la
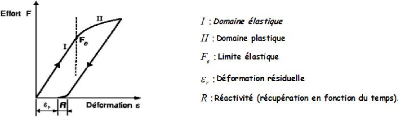
plate forme de Stewart, Ce système se compose donc de huit corps en jeux et de douze liaisons. Cela fait perdre la simplicité de la structure et diminue sa rigidité. C'est ainsi que les données recueillies lors de notre étude ont permit de choisir judicieusement et spécifiquement les matériaux constituant le cops d'épreuve ainsi que la procédure de son dimensionnement. Toutefois, le corps d'épreuve doit être utilisé dans sa limite élastique linéaire afin d'assurer une relation linéaire entre la déformation mesuré et l'effort appliqué. La pièce mécanique constituant le corps d'épreuve est un solide homogène isotrope51. Lorsque cette structure est soumise à des efforts extérieurs ces poutres subissent des déformations élastiques d'ordre microscopique qui varient linéairement par rapport aux contraintes qui lui sont appliquées (figure 103).
Figure 103 Courbe d'effort/déformation typique Selon la loi de Hooke, la relation liant le tenseur des contraintes ä à celui des déformations å s'exprime sous la forme ä = Eå où E est un coefficient propre à la matière appelé module de Young ou module d'élasticité. 51 Isotrope : corps qui présente les mêmes propriétés dans toutes les directions. Grâce à sa propriété élastique linéaire le corps d'épreuve se déforme d'une manière proportionnelle sous l'effet de la contrainte qui lui est appliquée. Les jauges collées à la surface des poutres ont pour rôle la mesure de ces déformations afin de les traduire en signaux électriques. Ce dispositif nous permet ainsi de calculer l'état de contrainte. C'est le principe de l'extensométrie. L'exploitation de la théorie de l'élasticité linéaire a permis de mettre en place le capteur qui traduit la valeur de la contrainte en une grandeur ou une indication exploitable. 2.2-Principe de jauges de deformation Les jauges de déformation ou jauges d'extensométrie nommées parfois « jauges de contrainte » par abus de langage, sont constituées par un fil résistant très fin (sous forme de spires rapprochées) imprimé ou collé sur un support isolant de petite taille (de quelque millimètre à quelque centimètre de longueur).
Figure 104 Exemple d'une jauge de déformation Lorsqu'une poutre supportant une jauge d'extensométrie se déforme, le fil qui est collé sur sa surface s'étire. Sa résistance électrique donnée par R = ñL / S ( ñ : résistivité du conducteur, L : longueur en mètre et S : section en mètre carré) varie proportionnellement avec la variation de sa longueur : ÄR / R = KÄL / L . La constante K est le facteur de jauge, il dépend du matériau qui la compose et caractérise sa sensibilité. Cette relation est à la base de l'extensométrie [Cout 00]. La mise en pratique de cette relation se réalise en montant quatre jauges collées sur un support en pont de Wheatstone, ce qui permet de traduire des déformations de support de jauge ( ÄL / L) atteignant les 10-6mètres. En mesurant la variation de résistance de jauge, on en déduit alors sa déformation et par conséquent l'amplitude de l'effort exercé sur le corps d'épreuve.
Figure 105 Montage en pont de Wheatstone Suivant le nombre de jauges constituant le pont, il est possible de distinguer trois types de montage possibles : - Montage en quart de pont : comporte une jauge active. - Montage en demi-pont : comporte deux jauges actives. - Montage en pont complet : comporte quatre jauges actives. Les jauges manquantes sont remplacées par des résistances fixes ou par des jauges dites jauges de complément. Dans le cas du capteur développé au cours de cette étude le corps d'épreuve est instrumenté par six ponts complets. Chaque pont comporte ainsi quatre jauges actives collées deux à deux en sens opposé sur la même poutre.
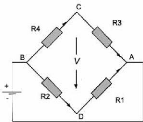
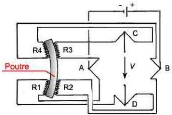
Figure 106 Montage de jauges de déformation en
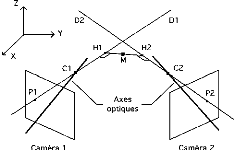
pont de Wheatstone sur une poutre. L'adoption de ce type de montage en pont de Wheatstone complet offre la possibilité de détecter le courant passant par la diagonale du pont (entre les broches C et D) lorsque A et B sont connectés à une source de courant. À l'équilibre, la tension entre les deux points (C et D) situés entre les deux extrémités est nulle. Si l'une des résistances varie, le pont est déséquilibré et la tension de sortie Vm mesurée est pratiquement proportionnelle aux variations relatives de résistance ÄR / R de chacune des jauges. Autres particularités de ce montage, deux résistances adjacentes du pont (R1 et R3) agissent en sens opposé, alors que deux résistances opposées (R1 et R2) agissent dans le même sens pour l'équilibre du pont ÄR1 = - ÄR2 = ÄR4 = - ÄR3 = ÄR Il est ainsi possible d'éliminer l'influence de certains phénomènes (telle que la température) et d'accroître la sensibilité au profit de la grandeur à mesurer (la force) [Robe 04]. Le pont de jauge est ensuite raccordé à un conditionneur-amplificateur qui alimente le capteur, conditionne et amplifie le signal de quelques millivolts à quelques dizaines de volts. 2.3-Conditionnement et acquisition des signaux Le rôle du conditionneur dans la chaîne d'acquisition est fondamental. Grâce à ces deux parties distinctes, il permet en premier temps d'alimenter les ponts de Wheatstone en générant une tension très stables de 5 à 10 mv, suivant les valeurs de résistance qui constitue le pont. Dans un second ordre il permet d'amplifier les signaux issus des ponts afin d'obtenir des tensions en sortie de l'ordre du Volt qui pourront ensuite être envoyées sur une carte d'acquisition analogique numérique. Il existe généralement deux types de conditionneurs, l'un est unipolaire (ou asymétrique référencé), il génère une tension de sortie comprise entre [0 V , 10 V] ; l'autre est bipolaire (ou différentiel) dont la tension de sortie est comprise entre [-5 V , 5 V]. L'électronique de conditionnement constitue le premier maillon de la chaîne d'acquisition des signaux en provenance des ponts de Wheatstone. L'enregistrement des signaux est ensuite assuré via une carte de Conversion Analogique Numérique (CAN) ; de la société National Instrument52 ; reliée à un ordinateur qui stockera l'ensemble des signaux provenant des conditionneurs à une fréquence fixée au préalable par l'expérimentateur. 52 www.ni.com/ Annexe 4 Mesures cinématographiques Sommaire 1.1- Le calibrage des caméras 1.2-Acquisition des coordonnées 2D 1.3-Calcul des données 3D 1.4-Précision des données vidéo 2-Effets de la PSR vs la PSG sur la dynamique articulaire 1.1-Le calibrage des cameras : Le calibrage consiste à identifier pour chaque caméra un modèle donnant des relations entre les cordonnées 3D d'un marqueur dans l'espace et les coordonnées 2D de ce même marqueur dans l'espace image des caméras. L'étape de reconstruction 3D requiert l'étalonnage préalable des paramètres intrinsèques des caméras et de leurs situations relatives. Le système cinématographique utilisé est basé sur la stéréovision passive. Il s'agit du même principe qui gouverne la vision humaine. En effet, l'image d'un objet permet de déterminer sa position horizontale et verticale mais pas sa profondeur. Ainsi, nos deux yeux délivrent deux images légèrement décalées qui nous permettent d'évaluer la profondeur. De ce fait, pour la reconstruction 3D, chaque marqueur doit être vu par au moins deux caméras. Cette manipulation s'effectue en plaçant dans le champ des caméras un objet de taille connue sur lequel on place un repère précis ; celui ci peut être un cube ou une grille de calibration que l'on déplace dans le volume expérimental. Au cours du calibrage, une baguette rigide en forme de T contenant un marqueur à chaque extrémité est utilisé. La distance qui sépare les deux marqueurs est de 581,2 mm. 1.2-Acquisition des cordonnees 2D : Cette étape a pour fonction de déterminer les coordonnées 2D des marqueurs, c'est-àdire leurs coordonnées dans les images de chaque caméra. Ces coordonnées constituent les données de base. Elles sont acquises à une fréquence de 250 HZ par l'intermédiaire de six caméras monochromes synchronisées et associées à des sources infrarouges spécifiques. 1.3-Calcul des donnees 3D : L'étape de calibrage des caméras est essentielle et très importante car elle va permettre l'application du principe de stéréovision passive sur lequel repose le calcul des coordonnées tridimensionnelles. Ainsi le logiciel peut effectuer un calcul automatique optimisé des coordonnées 3D de chaque marqueur à la suite d'une identification de sa trajectoire en 2D. Plus précisément, la position d'un marqueur est trouvée en lui attribuant des coordonnés du point M situé sur le milieu du segment H1-H2 qui minimise l'écart entre les deux droites objets D1 et D2 (figure 107).
Figure 107 Détermination des coordonnées 3D d'un marqueur Ainsi à l'aide d'une méthode des moindres carrés et des équations de D1 et D2, les coordonnées tridimensionnelles de H1 et H2 sont calculées puis utilisées pour trouver celles du point M.
2
2
2 Parallèlement au calcul des coordonnées 3D, nous pouvons procéder à une interpolation des trajectoires en 2D. Ceci est particulièrement utile lorsque des marqueurs n'ont pas été détectés pendant un bref instant comme par exemple lorsqu'une partie du corps est masquée par un membre ou encore lors d'une rotation trop importante d'un segment corporel qui empêche la détection des marqueurs. 1.4-Precision des donnees video Le but des mesures cinématiques est de déterminer le plus précisément possible les positions au cours du temps des marqueurs distaux et proximaux de chaque articulation. Selon Allard et al. (1994), l'imprécision de mesure est due à l'accumulation d'un certain nombre d'erreurs (figure 108).
Figure 108 Propagation des erreurs de mesure en
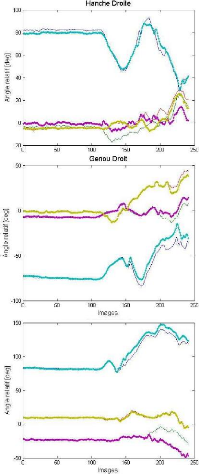
fonction des différentes étapes nécessaires Nous pouvons répartir ces erreurs suivant deux catégories : - celles relatives à la reconstruction tridimensionnelle (équipements, objet de calibration) - celles dues aux mouvements de la peau sur l'articulation et des marqueurs sur la peau. De ce fait, il est important d'évaluer la précision avec laquelle le système fournit les deux grandeurs que sont : la distance entre les deux points et l'angle entre deux segments consécutifs par exemple. Dans le cas de nos mesures, bien que l'erreur systématique de l'instrument annoncée par le constructeur soit de l'ordre du millimètre (< 0,1% du champ de mesure), il est tout de même nécessaire d'effectuer un certain nombre de mesures pour cerner au plus près l'erreur de nos évaluations. La précision de nos données est testée selon deux modes : le mode statique et le mode dynamique. Dans le cas des tests en mode statique, nous avons positionné dans le champ des caméras la baguette de calibration. Dans le cas des tests en mode dynamique, la baguette de calibration est déplacée dans l'ensemble du champ. Enfin, nous avons vérifié la distance séparant les deux marqueurs au cours de toute la durée de l'acquisition. Nos erreurs sont de #177;11,6 mm en mode dynamique et #177;0,8 mm en mode statique. Ces résultats sont satisfaisants pour une baguette rappelons le de 581,2 mm de longueur soit respectivement #177;2% et #177;1%. 2-Effets de la methode de solidification globale sur la definition des angles articulaires La figure 109 illustre le résultat de la confrontation des angles relatifs calculés suite à l'application de la procédure d'optimisation globale [Lu 99] aux angles relatifs bruts issus directement des mesures cinématographiques (sans traitement préalable). La procédure d'optimisation globale est détaillée dans le chapitre VII.
Figure 109 Confrontation des angles relatifs issus des
mesures directes et suite à l'adoption d'une
300 200 200 -100 -200 -300 -400 e -500
te 0 -100 100 0 te -100
100 t 200 200 600 0 400 0 -200 PSG PSR 200 -200 -400 0 -400
Temps [s] -600
Temps [s] -200
Temps [s] -800 100 0
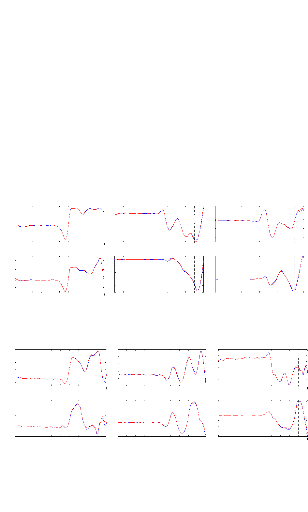
Figure 110 Forces inter-segmentaires au niveau du coude droit et de l'épaule droit exprimées respectivement dans abras , athorax (membre supérieur droit) Fx 200 Fy 300 Fz 250 te -100 200 100 0 200 te 150 100 50 te 0
-2000 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -50
PSG PSR 100 0 -100 -200 -300 Epaule [N] Coude [N] Epaule [N] Coude [N] 400 200 0 -200 600 400 200 0 -200 -400 200 0 -200
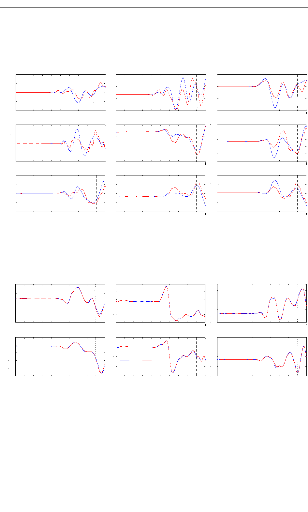
Temps [s] Temps [s] 100 20 50 50 0 0 0 -20 -50 -50 te te te -100 -40 -100 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1000 500 0 -500 -1000 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 2000 1000 0 -1000 -2000 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Temps [s] 1000 0 -1000 -2000 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 2000 1000 0 -1000 -2000 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Temps [s] 1000 500 0 -500 -1000 -1500 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 2000 1000 0 -1000 -2000 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Temps [s] Figure 112 Force inter-segmentaires au niveau de C7, T12 et L5 exprimées respectivement dans atête , athorax et aabdomen PSG PSR 400 200 0 PSG PSR -200 -2000 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -400 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 - - Epaule [Nm] Coude [Nm] L5 [N] T12 [N] C7 [N] Mx 200 0 -200 -400 -600 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 My 400 300 200 100 0 -100 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Mz 150 100 50 0 -50 -100 -150 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 te te te 400 200 0 -200 -400 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Temps [s] 500 0 -500 1000 1500 Figure 113 Moments articulaires au niveau du coude droit et de l'épaule droite exprimés respectivement dans abras , athorax (membre supérieur droit) 235
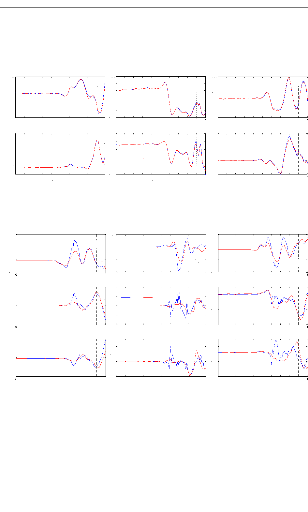
236 Temps [s] Temps [s] Temps [s] 200 0 -200 -400 -600 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1500 1000 500 0 -500 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 500 400 300 200 100 0 600 400 200 -200 -400 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 300 200 100 0 -100 1000 500 0 -500 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 0 t e te te -100 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 PSG PSR -200 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Figure 114 Moments articulaires au niveau du coude gauche et de l'épaule gauche exprimés respectivement dans abras , athorax (membre supérieur gauche) Mx My Mz -1500 -1000 20 50 te 0 0 -20 t e -50 te 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -40 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -100 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 2000 1000 1000 PSG PSR 500 0 0 -500 -1000 -1000 -2000 -1500 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1500 1000 1000 500 500 0 0 -500 -500 -1000 L5 [Nm] T12 [Nm] C7 [Nm] Epaule [Nm] Coude [Nm] -1000 -2000 -3000 -2000 -4000 200 100 0 -100 3000 2000 1000 0 4000 2000 0 Achevé d'imprimer en Février 2009 Laboratoire de Mécanique des Solides http://www-lms.univ-poitiers.fr Contribution a la caracterisation mecanique des
criteres de qualites du L'objectif de ce travail est de définir les paramètres mécaniques qui caractérisent le départ de course vitesse sur 100 m. La première partie, suite à une analyse de la littérature technique, du règlement instauré par l'IAAF et des études scientifique, cerne les problèmes liés à la mesure et au choix des critères de qualification de la performance du départ de course vitesse sur 100m. La seconde partie met en évidence la nécessité de déterminer avec plus de précision l'instant de mise en action du coureur notamment lors des compétitions internationales. Une analyse en composante principale est réalisée afin de tester la possibilité de créer de nouveaux critères permettant une interprétation objective et fiable de la performance du départ de course vitesse. Au cours de la troisième partie, l'efficacité d'un départ est approchée en intégrant des paramètres directement accessibles par dynamométrie pour enfin les « traduire » en unités de temps. Une station dynamométrique est validée afin d'offrir à l'entraîneur des indications fines, en temps quasi réel, lors des séances d'entraînement. La quatrième partie, propose une nouvelle méthode de solidification permettant une application rigoureuse des principes de la mécanique lors de la modélisation tridimensionnelle de l'athlète. Le calcul des torseurs d'action inter segmentaire est réalisé par programmation de l'algorithme de Newton-Euler, en utilisant un formalisme d'opérateurs homogènes. * * * * * * * * * * * * * * * Contribution to the mechanical characterization of the
quality criteria of the The purpose of this work is to define the mechanics parameters which characterize the sprint start on 100 m running event. The first part of this work analyzes technical writings, IAAF laws and scientific studies to indicate problems concerning measurement and choice of the quality criteria to describe performance on sprint start. The second part draws attention to the necessity to define the athlete's action time with more accuracy, especially at the international competitions. A principal component analysis is realized to test the eventual possibility to create a new criterion allowing an objective and reliable performance interpretation on sprint start. In the third part the efficiency of sprinting start is estimated by using kinetic parameters measured by sensor. A dynamometric apparatus is developed to provide immediate and accurate feedback to coaches and sprinters. The fourth part suggests a new solidification procedure which permits a rigorous application of mechanical laws during the athlete's 3D modeling approach. The 3D inter segmental mechanical actions of the whole body are calculated by using homogeneous matrix developed in field of robotics. |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||