1.2.2. La vision
stéréoscopique artificielle :
Une image représente une
projection, sur une surface, du monde tridimensionnel dans lequel nous vivons.
Comme cette surface ne possède que deux dimensions, des renseignements
essentiels sur la structure de la scène sont perdus lors de la
projection. Par exemple, deux objets paraissant côte à côte
sur une image peuvent en fait être à des distances très
différentes de la caméra au moment de la capture de l'image. Mais
certains indices visuels révélés par une image peuvent
nous aider à reconstituer la scène originale : nos connaissances
sur la taille des objets, l'éclairage, les textures sur les objets, le
flou, les points de fuite, etc. De plus, lorsque plusieurs images de la
même scène sont captées en variant le point de vue de la
caméra entre les clichés (c'est le cas de la vision binoculaire,
par exemple), de l'information supplémentaire et parfois suffisante sur
la structure de la scène est obtenue.
La vision par ordinateur regroupe des
techniques se servant, entre autres, de tous ces indices afin de reconstituer
une scène en trois dimensions à partir d'une ou de plusieurs
images de cette scène.
1.2. Les principes de la
perception de la profondeur :
La perception de la profondeur repose
sur dix indicateurs. Ces derniers contiennent de l'information qui, s'ajoutant
à l'image 2D projetée sur la rétine, nous permettent de
voir les objets de l'image dans un espace tridimensionnel. Ces indicateurs se
divisent en deux groupes : le premier, concerne quatre indicateurs
physiologiques et le second, six indicateurs psychologiques.
1.3.1 Les indicateurs
physiologiques sont les suivants :
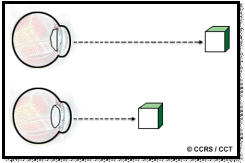
1.3.1.1 Accommodation et
convergence :
1.3.1.1 Accommodation
Le cristallin (la lentille biconvexe
derrière la pupille) se contracte ou s'allonge selon qu'il cherche
à mettre au foyer l'image sur la rétine d'un objet proche ou
éloigné. Cette source physiologique d'information serait
essentiellement exploitée pour des objets perçus à des
distances inférieures à deux mètres, puisqu'au-delà
de cet éloignement, le cristallin n'est pratiquement plus
déformé.
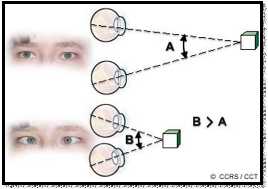
1.3.1.2 Convergence
Les deux yeux convergent vers le
point fixé par le regard. Plus les objets sont à
proximité, plus l'angle d'ouverture séparant les axes de
visée sera prononcé. En d'autres termes, les yeux sont davantage
tournés vers l'intérieur si l'on fixe un objet près de
nous et ils sont plutôt parallèles pour les objets
éloignés.
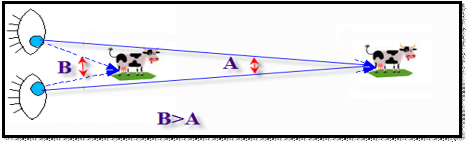
1.3.1.2 Disparité
binoculaire :
La disparité binoculaire est
l'indicateur de perception de profondeur jugé le plus important pour la
vision sur des distances moyennes. Chaque oeil dispose d'un point de vue sur la
scène. Étant donné le phénomène de
convergence, les différences entre les images rétiniennes
diminuent avec l'éloignement. Par contre, les objets rapprochés
montreront des différences significatives, notamment au niveau des
configurations perçues, du dévoilement de parties cachées,
de variations d'éclairage sur les surfaces.
| 

