F <= 25 N
.
Et les valeurs numériques utilisées sont :
mc = 1 kg , mp = 0.1kg , L = 0.5m
, g = 9.8m/s2
La création des règles représentait un grand
obstacle , et pour le surmonter nous nous sommes basés sur la
mécanique , pour illustrer cette idée nous donnons un
exemple :
exemple :
SI (è est positive) ET
(è.est zéro) ALORS (F est positive)
.
La force F doit être positive pour surmonter le pendule et
le rendre à sa position vertical .
- è
+ è
- è. +
è.
-F
+F
c'est de cette façons que nous avons créé
les 09 règles d'inférence suivante :
|
è.
è
|
N
|
Z
|
P
|
|
N
|
NG
|
NM
|
ZN
|
|
Z
|
NP
|
Z
|
PP
|
|
P
|
ZP
|
PM
|
PG
|
Tab.5 : base des règles
Chapitre IV : Méthodologie de conception et
application
La figure (IV.6) montre la variation de l'angle
et de la vitesse angulaire et la forme de la commande sera
représentée par la figure (IV.7) .
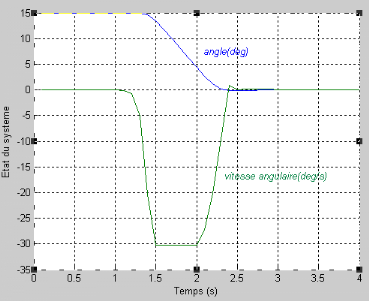
Figure
IV.6 :variation de l'angle et de la vitesse angulaire .
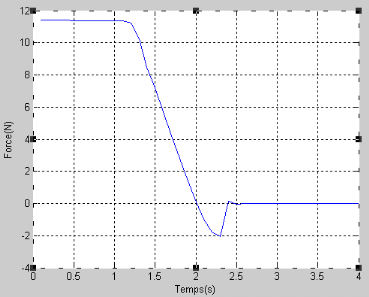
Figure
IV.7 : Forme de la commande

Chapitre IV : Méthodologie de conception et
application
Figure IV.8 : Plan de phase
La figure (IV.8) montre comment la trajectoire
s'approche à l'équilibre (00, 00/s)
à partir des conditions initiales (150,00/s) .
On remarque d'après les figures précédentes
que le contrôleur arrive à stabilisé le pendule autour de
la position d'équilibre pendant un temps inférieur à 2.5s
.
IV.5.1.1 Test de la robustesse
Pour tester la robustesse de notre contrôleur FLC
(333) on doit s'écarter des conditions normales d'utilisation
et voir si son aptitude réagi bien .
Pour cela nous avons testé notre contrôleur pour
plusieurs conditions initiales :
La premier condition est la suivante :
{ ( è , è., F) } = { ( 100 ,
00/s , 8 N ) } .
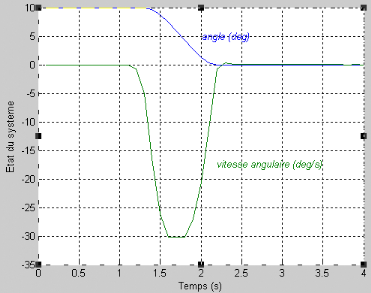
Figure
IV.9 : variation de l'angle et de la vitesse angulaire .
Chapitre IV : Méthodologie de conception et
application
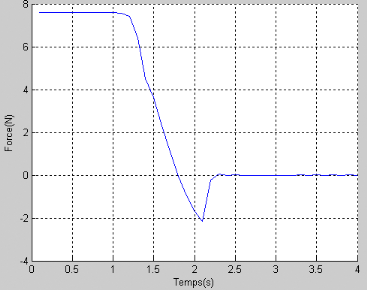
Figure
IV.10 : Forme de la force .
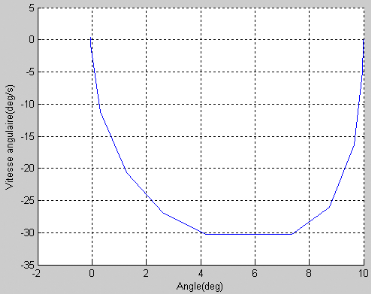
Figure
IV.11 : Plan de phase .
Et pour les conditions initiales suivantes :
{ ( 120 , 00/s , 10 N ) , ( 200
, 00/s , 16 N ) , ( 250 , 00/s , 20 N )
, ( 300 , 00/s , 25 N ) } .
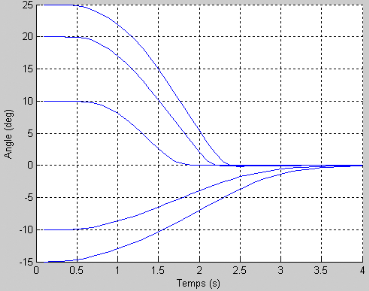
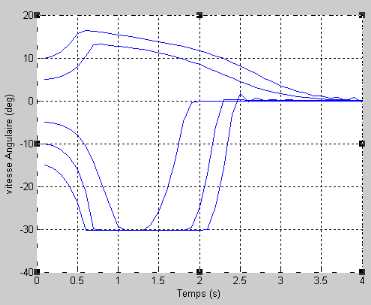
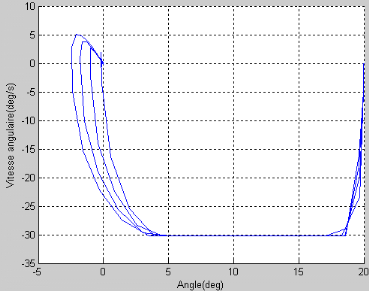
Les figures (IV.12) , (IV.13)
, (IV.14) , (IV.15) ,montrent la
robustesse de notre contrôleur .
Remarque :
Si l'angle augmente on doit augmenté la force pour pouvoir
soulevé la tige ( le pendule) .
Chapitre IV : Méthodologie de conception et
application
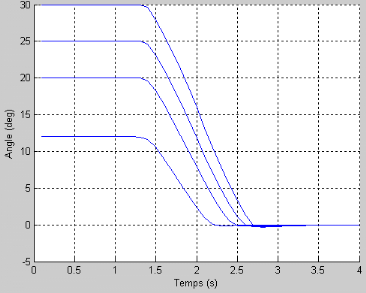
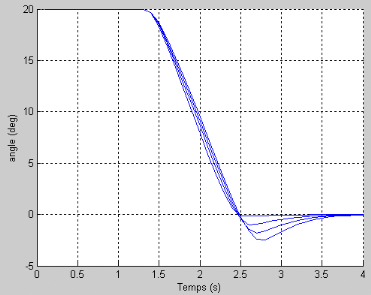
Figure
IV.12 : variations des angles .
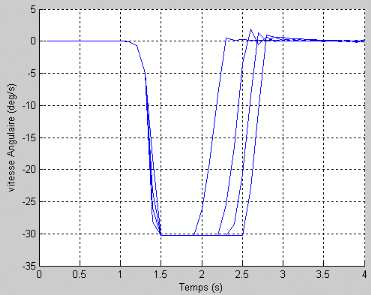
Figure
IV.13 : variations des vitesses angulaires .
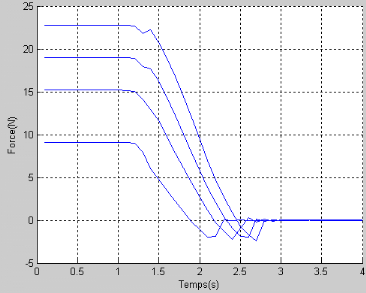
Figure
IV.14 : Formes des forces .
Chapitre IV : Méthodologie de conception et
application
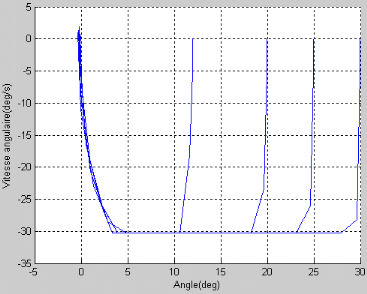
Figure IV.15 : le plan de phase .
Et enfin pour les conditions initiales suivantes :
{ ( 100 , -50/s , 7 N ) , ( 200
, -100/s , 14 N ) , ( 250 , -150/s , 17
N ) , ( -100 , 50/s , -7 N )
( -150 , 100/s , -8 N ) } .
Figure
IV.16 : variations des angles .
Chapitre IV : Méthodologie de conception et
application
Figure
IV.17 : variations des vitesse angulaires .
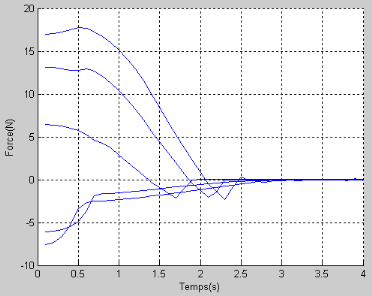
Figure IV.18 : Formes des forces .
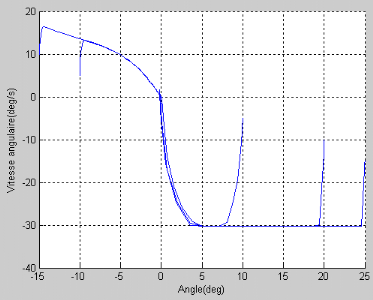
Figure IV.19 : le plan de phase
Chapitre IV : Méthodologie de conception et
application
Pour mieux testé notre contrôleur , on fait des
teste sur le changement de la longueur de la tige ( 0.5 , 0.7 , 0.9 et
1.1m ) avec les conditions initiales suivantes ( 200 ,
00/s , 15 N ) .
Figure
IV.20 : variations des angles .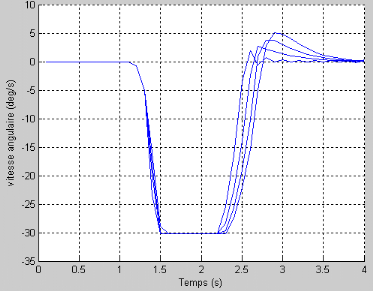
Figure
IV.21 : variations des vitesse angulaires .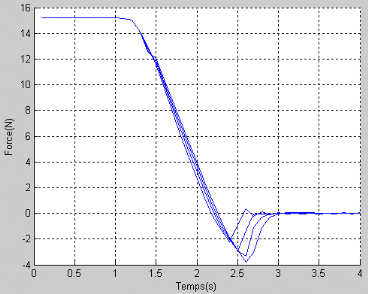
Figure IV.22 : Formes des forces .
Chapitre IV : Méthodologie de conception et
application
Figure
IV.23 : le plan de phase
Pour mieux le testé encore , on fait des teste sur le
changement du poids de la tige :
( 0.1 , 0.4 , 0.8 , 1.2 et 1.6 kg ) avec les conditions
initiales suivantes :
( 200 , 00/s , 15 N )
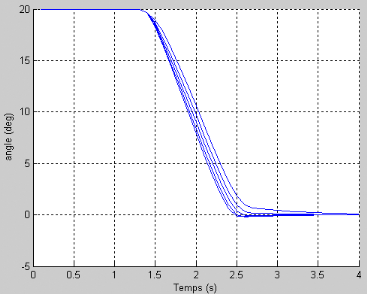
Figure IV.24 : variations des angles .
Chapitre IV : Méthodologie de conception et
application
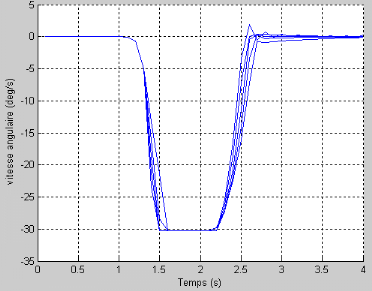
Figure IV.25 : variations des vitesses angulaires .
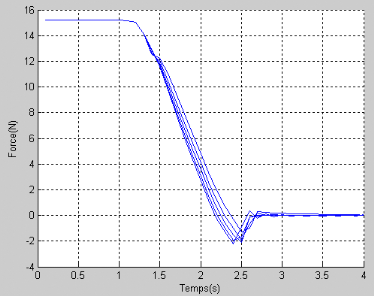
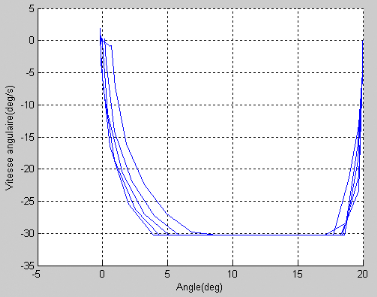
Figure IV.26 : Formes des forces
.
Figure
IV.27 : plan de phase .
Chapitre IV : Méthodologie de conception et
application
| 

