III.5 L'état des lieux et les perspectives de
recherche :
La conception de systèmes à base de composants
est devenue une pratique courante depuis déjà plusieurs
années. Face aux difficultés mentionnées plus haut et
à l'impossibilité pour les grands groupes d'obtenir un consensus
sur des standards, la notion de composant IP Plug-and-Play - c'està-dire
implantable directement sans effort de la part de l'utilisateur et sans
intervention du concepteur - est perçue aujourd'hui comme un objectif
irréaliste et des solutions industrielles ont été mises en
place pour résoudre les problèmes sans attendre. La notion de
Platform IP résout la question de l'interopérabilité des
composants provenant de sources variées en fournissant une architecture
SoC prête à l'emploi et configurable de manière
limitée (choix des périphériques dans une
bibliothèque de composants sélectionnés pour la
compatibilité de leurs interfaces).
Une partie des résultats obtenus par les industriels
dans la construction et la mise au point de ces plates-formes pourraient
être exploités pour leur adaptation à la notion de
composant temps réel. En particulier, la gestion des interfaces et
l'interopérabilité des composants est un problème bien
cerné pour les IP. La caractérisation temporelle des IP fait
également partie des contraintes qu'il faudrait attacher aux composants
temps réel. Il faudrait étendre ces travaux afin de les adapter
à des matériels de plus haut niveau que les SoC.
A l'inverse, il semble maintenant acquis que les techniques
employées dans la conception du logiciel (méthodologie, outil de
développement, outil de vérification) doivent être
appliquées à la

Chapitre III conception matériel
conception de systèmes matériels. Cela suppose une
adaptions de ces méthodes et outils logiciels pour la prise en compte,
au niveau de ces modèles, de caractéristiques inhérentes
au matériel.
III.6. Architecture matérielle d'un
système embarqué :
La figure III.1 présente les caractéristiques
principales d'un système embarqué typique.
FPGA/ ASIC
LOGICIELLE
MEMOIRES
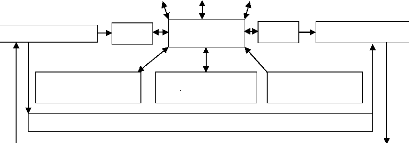
CNA
CAN
CAPTEURS
CPU
INTERFACE
UTILISATEUR
SECURITE ELECTROMECANIQUE
PORT
ENTREES
ALIMENTATION
AUXILIAIRE
ACTIONNEURS
ENVIRONNEMENT EXTERIEURE
Figure.III.1 : Système embarqué
typique
On retrouve en entrée des capteurs
généralement analogiques couplés à des
convertisseurs A/N. On retrouve en sortie des actionneurs
généralement analogiques couplés à des
convertisseurs N/A. Au milieu, on trouve le calculateur mettant en oeuvre un
processeur embarqué et ses périphériques d'E/S. Il est
à noter qu'il est complété généralement d'un
circuit FPGA jouant le rôle de coprocesseur afin de proposer des
accélérations matérielles au processeur.
On retrouve en fait un beau système d'asservissement
entre les entrées et les sorties ! Il est à noter que
l'expression la plus simple de cette figure est de considérer, comme
capteurs, des interrupteurs et, comme actionneurs, des LED
Sur ce schéma théorique se greffe un
paramètre important : le rôle de l'environnement extérieur.
Contrairement au PC ronronnant bien au chaud dans un bureau, un système
embarqué doit faire face à des environnements plus hostiles. Il
doit faire face à un ensemble de paramètres agressifs :
· Variations de la température ;
· Vibrations, chocs ;
· Variations des alimentations ;
· Interférences RF ;
· Corrosion ;
· Eau, feu, radiations ;
L'environnement dans lequel opère le système
embarqué n'est pas contrôlé ou contrôlable. Cela
suppose donc de prendre en compte ce paramètre lors de sa conception. On
doit par exemple

prendre en compte les évolutions des
caractéristiques électriques des composants en fonction de la
température, des radiations... Pense-t-on à tout cela lorsque
l'on conçoit une carte mère de PC ? Enfin pour terminer cette
partie, les systèmes embarqués sont aujourd'hui fortement
communicants. Cela est possible grâce aux puissances de calcul offertes
par les processeurs pour l'embarqué (32 bits en particulier) et
grâce aussi à l'explosion de l'usage de la connectivité
Internet ou connectivité IP. La connectivité IP permet
fondamentalement de contrôler à distance un système
embarqué par Internet. Ce n'est en fait que l'aboutissement du
contrôle à distance d'un système électronique par
des liaisons de tout type : liaisons RS.232, RS.485, bus de terrain...
Cela permet l'emploi des technologies modernes du web pour ce
contrôle à distance par l'utilisateur : il suffit d'embarquer un
serveur web dans son équipement électronique pour pouvoir le
contrôler ensuite à distance, de n'importe où, à
l'aide d'un simple navigateur. Il n'y a plus d'IHM spécifique à
concevoir pour cela, ce rôle étant rempli par le navigateur web.
Cela est une réalité : les chauffagistes proposent maintenant des
chaudières pouvant être pilotées par le web ! Il faut aussi
noter la montée en puissance des communications sans fil dans
l'embarqué au détriment des communications filaires pour limiter
le câblage et faciliter la mise en place du système
embarqué. Le wifi et toutes les normes de réseaux sans fil IEEE
802.15 comme Zigbee ont le vent en poupe dans l'embarqué et surtout en
domotique (réseaux de capteurs sans fil par exemple).Mais ne nous
méprenons pas sur ces facilités et commodités, cela a bien
sûr un revers : la sécurité du système
embarqué, puisque connecté à Internet.
III.6.1. Les capteurs : III.6.1.1. Définition
:
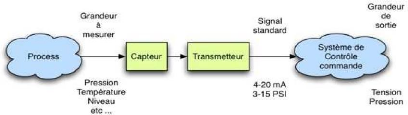
Figure .III.2 : Capteur et transmetteur en
situation
Un capteur est un organe de prélèvement
d'information qui élabore à partir d'une grandeur physique, une
autre grandeur physique de nature différente (très souvent
électrique). Cette grandeur représentative de la grandeur
prélevée est utilisable à des fins de mesure ou de
commande.
-virtuellement, tous les stimuli physiques peuvent être
captés (température, lumière, couleur, son,
vélocité, accélération (linéaire,
angulaire), pression, champ magnétique, tension, courant,
capacité...).
-Interfaces pour ces capteurs (alimentation, isolation et
amplification, filtrage, multiplexage, conversion A/N, FPAA).
| 

