CHAPITRE 1
GENERALITES
1.1 Historique : [7, 55, 56] :
Le terme robot vient du Tchèque, il signifie travail
forcé le mot sous son acception moderne, fut introduit par l'auteur
tchèque Kanel Capek dans son ouvrage R.U.R .qui date de 1921 en anglais
Rossum's Universel Robots.
Le concept de Robot industriel fut breveté en 1954, par
G.C. Devol (Brevet U.S. N°=2988237) ; ce brevet décrit la
réalisation d'un bras mécanique asservi, capable d'effectuer des
tâches du caractère industriel.

1.1 Définitions générales: [14, 55, 56,
57, 58, 59] :
Le dictionnaire Robert propose comme
définition : Mécanisme automatique pouvant se substituer à
l'homme pour effectuer certaines opérations, et capable d'en modifier de
lui même le cycle et d'exercer un certain choix, (par détection
photoélectrique des "cerveaux" électroniques de servomoteurs
etc.).
La J.I.R.A. (Japan industrial Robot Association),
quand à elle met plus l'accent sur la notion d'automorphisme.
En donnant comme définition (1980), le dispositif versatile et flexible
offrant des fonctions de déplacement similaires à celle des
membres humains ou dont les fonctions de déplacement sont
commandés par ses capteurs et ses moyens de reconnaissance.
La R.I.A. (Robotic Industries Association)
aux Etats Unis ,insiste sur l'utilisation en proposant (1979) "(manipulateur
multifonction reprogrammable conçu pour déplacer des
matériaux, des pièces, des outils ou des dispositifs
spécialisés de déplacements variables et programmables
pour accomplir diverses tâches)".
L'A.F.R.I. (Association Française de Robotique
Industrielle) a de son coté renoncé à donner une
définition générale. Pour se focaliser sur la
définition de deux grandes classes (définition enregistrée
par L'A.F.N.O.R NF.E61-100) on y trouve ainsi définis
:
"Le manipulateur mécanisme
généralement composé d'éléments en
série articulés ou coulissants l'un par rapport à l'autre,
dont le but est la saisie et le déplacement d'objets suivant plusieurs
degrés de liberté. Il est multifonctionnel et peut-être
commandé directement par un opérateur humain ou par tout
système logique (système à cames, logique pneumatique,
logique électrique câblée ou programmée), et
le Robot industriel : "Manipulateur
automatique, asservi en position, reprogrammable, polyvalent, capable
de positionner et d'orienter des matériaux pièces, outils ou
dispositif spécialisé au cours de mouvement variables et
programmé pour l'exécution de tâches variées, il se
présente souvent sous la forme d'un ou plusieurs bras se terminant par
un poignet.
Son unité de commande utilise, notamment, un dispositif de
mémoire et éventuellement de perception de l'environnement.
Ces machines polyvalentes sont généralement
étudiées pour effectuer la même fonction de façon
cyclique et peuvent être adaptées à d'autres fonctions sans
modification permanente du matériel".
1.2.1 Mobilité du robot [12, 8]:
C'est le nombre de variables indépendantes qui
définissent la position du robot à un instant donné, la
mobilité est également le nombre d'actionneurs du robot, c'est ce
qu'on appelle le nombre d'axes de chaque actionneur commandant un axe, (m) est
un nombre entier (en général 3=m=7).
1.2.2 Degré de la tâche Dr. [8]:
C'est le nombre de paramètres indépendants qui
permettent de définir la tâche c'est à dire la situation
possible de l'organe terminal (position et orientation).
1.2.3 Espace généralisé [15, 32 , 33]:
En général la configuration de la
ième articulation d'un robot manipulateur ne possède
qu'un degré de liberté correspondant à un mouvement de
translation rectiligne ou de rotation entre deux corps successifs des robots,
situés sur une chaîne qui joint la base de l'organe terminal. A
chacun de ces mouvements est associé une variable qi ou i =1,2,... ,n
dont l'ensemble constitue le vecteur q= [q1,.....,qn]T
des coordonnées articulaires (généralisées) qui est
un élément de l'ensemble de configuration du robot.
1.2.4 Espace opérationnel (géométrique):
Afin de caractériser et de mesurer la position de
l'organe terminal, on définit un espace appelé espace
opérationnel qui a pour référence un repère
(Rop) orthonormé (o1 .x1 .y1 .z1) lié
généralement à la base du robot manipulateur, de
même il est nécessaire d'introduire un autre repère
(Rn) orthonormé (on,xn,yn,zn) lié à
l'organe terminal afin de mieux définir la situation (position,
orientation de l'organe terminal). Les coordonnées associées sont
donc appelées coordonnées opérationnelles.
Du point de vue théorique, six coordonnées
opérationnelles suffisent dans le cas général pour
définir la situation du repère (Rn) par rapport au
repère (Rop): Dont trois définissent la position de
l'organe terminal (On) et trois définissent son
orientation.
1.2.5 Redondance [12, 32, 33] :
Un robot est redondant lorsque le nombre de degrés de
liberté de l'organe terminal est inférieur au nombre de
degrés de liberté de l'espace articulaire (nombre d'articulations
motorisées). Cette propriété permet d'augmenter le volume
du domaine accessible et de préserver les capacités de
déplacement de l'organe terminal en présences d'obstacles.
1-2-6 Configuration singulière [12]:
Pour tous les robots, qu'ils soient redondants ou non, il se
peut que dans certaines configurations dites singulières, le nombre de
degrés de liberté de l'organe terminal soit inférieur
à la dimension de l'espace opérationnel.
La configuration singulière ou singularités se
traduisent, physiquement, par la nullité du déterminant de la
matrice Jacobéenne.
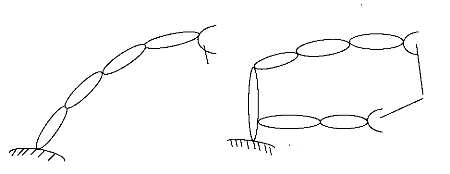
1-3 Structure et morphologie des robots: [12, 21, 55, 71] :
La partie mécanique d'un robot est
généralement constituée de deux sous ensembles
distincts.
Un (ou plusieurs) organe terminal considéré comme
une interface permettant au robot d'interagir avec son environnement.
Une structure mécanique articulée qui sert
à amener l'organe terminal dans une position et orientation
désirées cette structure est composée du : bras, base,
poignet coupleur et axe mécanique. Les robots peuvent être de:
-Structure à chaînes simples ouvertes figure 1.1.
-Structure à chaînes arborescentes figure 1.2.
-Structure à chaînes complexes figure 1.3.
Terminologie :
C0 : Corps de référence. C1 , C2 , C3 , C4 , C5 :
Corps. O.T. : Organe terminal.
C4
C3
L4
C3
C2
L3
C2
O.T.
C5
C4
C5
C6
CO
CO
L2
C1
L1 L1
L3
L5
O.T.
L2
C1
Figure 1.1 : Structure à Chaînes Figure
1.2 : Structure à Chaînes
Simples Ouvertes [21, 71]. Arborescentes [21, 71].
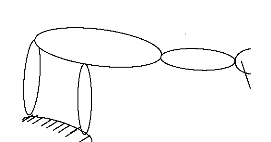
L3
L5
C5
C4
C1
O.T.
L4
C2
L1
L2
C3
CO
Figure 1.3 : Structure à Chaînes Complexes
[21, 71].
| 

