1-4 Classification des robots : [14] :
On peut aborder des classifications qui ne s'attachent
qu'à un aspect particulier du robot. C'est le cas du classement
morphologique ou cinématique reconnu par la norme (I.S.O. 8373) qui ne
porte attention là encore, qu'aux robots manipulateurs industriels
à poste fixe. Cette norme propose le découpage du tableau 1.1.
· on classe structurellement les robots en fonction des
systèmes de coordonnées dans lesquels ils travaillent [7,26] :
- Cartésien : Trois axes de translation.
- Cylindrique : Deux axes de translation, un axe de rotation.
- Sphérique : Un axe de translation, deux axes de
rotation.
- Articulé : Trois axes de rotation.
· Quand on commande un robot, on a intérêt
à pouvoir contrôler individuellement chaque articulation ou axe
pour être bien maître de la trajectoire. C'est pourquoi on utilise
principalement des liaisons pivot (articulations cylindriques). Elles ont par
ailleurs l'avantage d'une réalisation pratique peu onéreuse
comparée aux articulations à plusieurs degrés de
liberté. On comprend qu'une combinaison d'articulations cylindriques et
prismatiques permet de réaliser toutes les liaisons mécaniques
autour de trois axes normaux concourants donnent une rotule à
l'articulation rotoïde. [14].
Tableau 1.1 : [14] : Représentation des liaisons
mécaniques entre deux corps
(D'après N.F. EO4-O15).
|
Nom de Liaison
|
Mouvement relatifs
|
Nombre de Degré de liberté
|
Symbole
|
|
Encastrement
|
0: rotation
0: translation
|
0
|
C1: corps 1
C2
C2: corps 2
C1
|
|
|
Pivot
Articulation
Cylindrique
|
1: rotation
0: translation
|
1
|
C1 C
|
|
|
|
|
C2 C
|
|
|
Glissière Articulation Prismatique
|
0: rotation
1: translation
|
1
|
C2 C1
|
|
|
|
C2
C1
|
|
A
|
B
|
C
|
D
|
|
A
|
B
|
C
|
D
|
|
Glissière Hélicoïdale
|
1: rotation
1: translation conjuguées
|
1
|
|
C2
C1
|
|
|
Appui Plan
|
1: rotation
2: translation
|
3
|
C2
|
|
C1
|
|
Rotule Articulation Rotoide
|
0: rotation
3: translation
|
3
|
C2
C1
|
|
Linéaire Rectiligne
|
2: rotation
2: translation
|
4
|
C1 C1
|
|
C2
|
C2
|
|
|
|
Linéaire Annulaire
|
3: rotation
1: translation
|
4
|
C2
|
C2
C1
|
|
C1
|
|
Ponctuelle
|
3: rotation
2: translation
|
5
|
C1
|
|
C2
|
|
Libre
|
3: rotation
3: translation
|
6
|
Pas de symbole, pas
de contact entre les deux corps
|
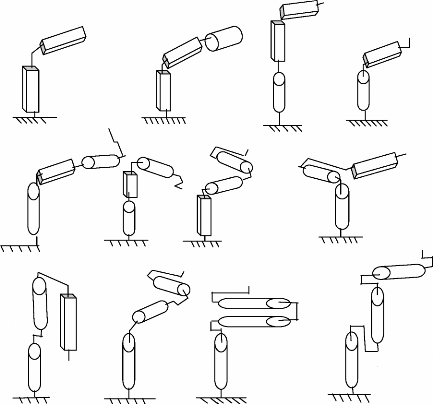
1.5 Les porteurs (bras) : F9, 14, 140] :
Cette configuration permet de classifier les robots par type de
porteurs :
· structure cartésienne (T.T.T) (3.d.d.l.).
· structure sphérique (ou polaire).
· structure angulaire (3R).
· structure SCARA.
Les bras manipulateurs à chaîne continue ouverte
et à chaîne arborescente sont les plus nombreux, ces bras
manipulateurs sont simples sur le plan conception car sans risque d'hyper
statisme largement exploitées, ces structures ont donné naissance
à plusieurs générations de robots pratiquement chez tous
les constructeurs.
Les bras manipulateurs conçus sur la base d'une structure
mécanique de type chaîne complexe ont pour avantage essentiel
d'augmenter la rigidité et par conséquent la précision en
mode programmé. Ces chaînes permettent en outre un meilleur
équilibrage statique. Leur exploitation industrielle, bien que
nécessaire dans certain cas, revient trop chère et
(9)
(1) (2) (3) (4)
(5)
SACARA
R/R/P
Cartésien
P/P/P
R/P/R R/P/R
10)
(6) (7) (8)
R/R/R
(11)
P/P/R
P/R/R
Angulaire
R/R/R
Cylindrique
R/P/P R/P/R
(12)
Sphérique
R/R/P
R/R/R
Figure 1.4 : les douze porteurs de robots
Le nombre total des possibilités des combinaisons de
trois articulations en série est de trente six, dont seulement douze
remplissent la fonction du porteur spatial et sont mathématiquement
distinctes.
Dans la pratique il semble dans une étude portant sur
cent quinze robots que quatre ou cinq arrangements soient utilisés pour
des raisons géométriques, la figure 1.6 : reproduit ces cinq
architectures avec leur partage d'utilisation.
Tous des robots sont de type robot série signifiant
par là qu'en partant de la base et en allant vers
l'extrémité on rencontre les articulations les unes après
les autres sur la même chaîne cinématique. [14].
Les télémanipulateurs comprennent un bras
maître et bras esclave qui répète les mouvements du bras
maître.
Les manipulateurs assistés sont dépourvus du
bras- maître qui est remplacé par une poignée de manoeuvre
située sur l'organe de préhension.
En milieu industriel, on trouve des
télémanipulateurs lorsque la sécurité de l'homme
est menacée (en génie nucléaire. On manipule à
distance les produits radioactifs). [55].
Dans le cadre d'une définition restrictive
fréquente d'un robot industriel, l'unité centrale est
constituée mécaniquement par un bras manipulateur
caractérisé par: plusieurs articulations successives à
partir d'une base fixe, de façon à donner l'outil terminal les
mobilités nécessaires (jusqu'à 3 degrés e
liberté en déplacements et 3 en orientation). [60].

P1
P2
Robot cartésien de structure P.P.P. (environ 15% du parc
des robots industriels).
R
P1
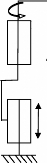
Robot cylindrique P.R.P.
(environ 45% des robots industriels).

R3
R2
P2
R
P
R1
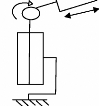
Robot polaire P.R.P, si R2 est de type cardan, on parle de Robot
anthropomorphique R.R.R.
robot pendulaire (environ 13% des robots industriels). (Environ
25 % des robots industriels).
R1

R2
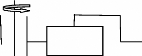
Robot SCARA P.R.R.
(environ 2 % des robots industriels). Symbole R: rotation ou
liaison cylindrique ou liaison pivot.
R1R2R3 R4 R5 R6


Robot vertébral
(Peu utilisé pour des applications industrielles).
Symbole P: translation ou liaison glissière ou liaison prismatique.
| 

