Un robot est caractérisé par une structure
arborescente articulée simple ou multiple dont les segments sont mobiles
les uns par rapport aux autres.
Cet ensemble a pour objectif de mener l'organe terminal vers un
lieu géométrique imposé par la tâche.
Les actions directes ne posent à priori pas de
problèmes mathématiques spécifiques puisque les
informations liées aux divers points de constitution des trajectoires
sont mémorisées au fur et à mesure d'un apprentissage.
Dans le second cas, la description du but, ou sens
géométrique par un système de décision est
effectuée selon une méthode de représentation
particulière par rapport à des références
connues.
L'exécution de l'ordre se fait par des transformations
successives dans divers espaces, reliés au robot vers l'espace de la
tâche ou espace opérationnel par rapport à d'autres
références.
· Description de la tâche en termes de position
géométrique avec éventuellement des contraintes.
· Transformation de la description initiale dans l'espace
des variables articulaires propres à chaque robot, chaque variable
représente une mobilité du système mécanique.
· Déduction des couples moteurs à
générer pour déplacer les articulations.
· Mouvement du système mécanique vers le but
dans l'espace réel de la tâche. 1-6 Conclusion :
La structure mécanique d'un robot manipulateur est
composée de plusieurs corps connectés les uns aux autres par des
liaisons appelées articulations ou joints, à un seul d.d.l. de
translation ou rotation, cette structure mécanique peut constituer une
chaîne cinématique continue ouverte simple, une chaîne
arborescente ou une chaîne complexe.
Un système de commande d'un robot peut être vu
comme un ensemble de processus communicants, ces processus
interdépendants sont alternativement producteur (s) ou consommateurs de
données, ils sont classés en deux catégories :
Des processus opératifs qui agissent sur l'environnement
du manipulateur
[Autres(s) manipulateur(s), autre (s) équipement(s)
automatisé(s)].
Des processus sensoriels, liés aux capteurs
extéroceptifs qui acquièrent des informations sur l'état
de l'environnement et engendrent des messages pouvant être reçus
et traités par les processus opératifs, l'exécution de ces
processus est en général confiée à des processus
que celui qui sert a l'exécution [18].
Pour réaliser la commande automatique par calculateur
d'un système mécanique articulé il faut être en
possession d'un modèle de ce dernier. Ce modèle est
élaboré à partir de certains paramètres
caractéristiques du système (l'agencement des D.D.L. les
longueurs masses inerties. etc...), ces paramètres sont plus ou moins
nombreux suivant qu'on s'intéresse au modèle cinématique
ou géométrique. Il est évident que ces modèles vont
s'éloigner de la réalité au fur et à mesure que les
vitesses augmentent et que, d'une part, des forces inertielles, centrifuges et
de couplage vont apparaître, et d'autre part les jeux frottements et
élasticités de toutes origines ne vont plus pouvoir être
négligés. Il est nécessaire de revoir la
modélisation [21].
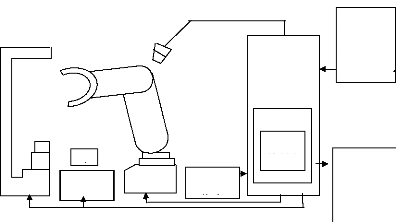
Signaux
Capteur caméra vidéo
Section commande
Bras
Mains
Objet
Machine Outil
Actionneur
Périphérique
Périphérique d'entrée -clavier -teaching
box -dispositif -d'entre vocale
Périphérique de sortie
-écran -imprimante -dispositif
de sortie vocale
Alimentation Interne
Ordinateur
Unité centrale
Homme



