CHAPITRE 2
MODELISATIONS GEOMETRIQUE, CINEMATIQUE ET
DYNAMIQUE
DIRECT ET INVERS DES SYSTEMES MECANIQUES POLY ARTICULE
AUX
ELEMENTS RIGIDES
2.1 Modèle géométrique [9, 27] :
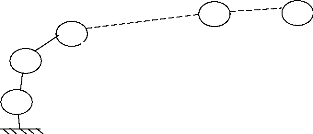
Le modèle géométrique d'un robot
constitue une représentation mathématique, en le
considérant comme une chaîne simple, ouverte, de (n) solides
(corps), rigides, sans boucles ni branchement, sans masses, articulés
entre eux; chaque corps est réduit à sa plus simple expression,
c'est-à-dire à son orientation et à sa position par
rapport au corps précédent.
Ci = (Pi, Oi) = (position i, orientation i).
Ci Cn
C2
P2O2 PiOi PnOn
C1
R
P1O1
Figure 2.1 : Structure arborescente. [21,38]
Chaque configuration géométrique possible est
définie par un ensemble de variables articulaires qui traduisent les
déplacements relatifs d'un corps par rapport au précédent.
Les variables articulaires (ou coordonnées articulaires ou
coordonnées généralisées) font le lien entre la
position et l'orientation de l'organe terminal et les consignes définies
dans un repère de base.

Nous l'exprimons par : X i /R i =
F(q1,q2, q n
(2.1)
Variables Variables
opérationnelles articulaires
2.2 Les variables articulaires :
Les variables articulaires expriment l'ensemble des
possibilités de mouvement entre deux articulations, le modèle
géométrique est composé tel que sur les six
possibilités de mouvements élémentaires d'un corps par
rapport à un autre (3 rotations et 3 translations) une seule est
retenue[8, 10, 11,12] . Ainsi les possibilités de mouvements multiples
aux niveaux technologiques sont décomposées en mouvements
élémentaires, au niveau du modèle, l'orientation entre
deux repères peut être traitée selon plusieurs techniques
classiques ;Les matrices de rotation, les cosinus directeurs, les angles de
Bryant, les angles d'Euler [12, 10, 11]...
.
2.3 Le système de paramètres de
Denavit-Hartenberg : [11, 12, 13, 24, 25, 26, 27, 28] :
La méthode est la plus couramment utilisée en
robotique pour la définition de l'orientation et de la position des
différents éléments d'un système mécanique
articulé.
Dans le domaine de la robotique, l'élaboration du
modèle nécessite une étude détaillée et
approfondie de la structure du robot. Dans la littérature il existe
plusieurs méthodes pour la modélisation des mécanismes
à structures de chaînes simples ou complexes, ouvertes ou
fermées [24].
Les plus utilisées sont les méthodes de
Denavit-Hartenberg et Sheth-Uiker, La première est très bien
adaptée pour les mécanismes à structures de chaînes
simples où toutes les liaisons sont élémentaires, mais,
elle présente des difficultés lorsqu'il s'agit de
mécanismes à structures de chaînes complexes; en effet les
corps possédant plusieurs liaisons élémentaires
(rotoïdes et / ou prismatiques) en aval, doivent être dotés
d'autant de repères, ce qui entraîne des lourdeurs. La
deuxième méthode vient palier les inconvénients
cités précédemment, mais elle présente des
redondances pour les mécanismes à structures de chaînes
simples.
L'utilisation de la transformée de Denavit-Hartenberg
(D.-H.), facilite la description géométrique du manipulateur ;
cette dernière nous permet d'aboutir au modèle cinématique
et géométrique direct et inverse du robot.
La même transformation offre une souplesse dans le calcul
du modèle dynamique direct en utilisant le formalisme d'Euler Lagrange
[25, 26, 27, 28].
Denavit et Hartenberg ont proposé une méthode
qui repose sur l'assignation d'un repère
unique pour chaque lieu,
cette convention est une méthode systématique, elle permet le
passage entre articulations adjacentes d'un système
robotique, elle concerne les chaînes cinématiques ouvertes ou
l'articulation possède uniquement un degré de liberté, les
surfaces adjacentes restent en contact. Le choix adéquat des
repères dans les liaisons, facilite le calcul des matrices
homogènes de Denavit-Hartenberg et permet d'arriver rapidement aux
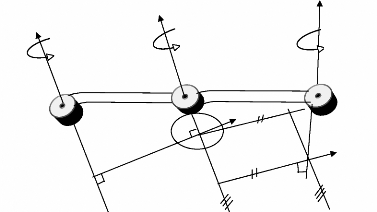
informations de l'élément terminal dans la base et vice versa; la
figure 2.2 représente l'utilisation de cette notation pour deux liens
successifs l'axe Zi du repère est concourant avec l'axe de
l'articulation i, quand à l'axe Xi, il est sur la droite perpendiculaire
aux axes Z i -1 et Zi. .
Zi-2
è i
è i+1
Joint i+1
Joint i-1
zi
Zi-1
Segment i-1 Joint i Segment i
è i-1
Xi-1
xi
d i
li
Figure 2.2 : Système de Coordonnées et
Paramètres de Denavit-Hartenberg
[12, 21, 27, 29, 30,31, 38,71].
Quatre paramètres sont alors utilisés pour
décrire la forme géométrique d'un lien et sa position par
rapport au lien précédent, la notation de Denavit-Hartenberg ne
fonctionne que pour des chaînes cinématiques sérielles,
(pour des chaînes arborescentes des ambiguïtés
apparaissent),
Cette notation, apparue très tôt dans le domaine
de la robotique est encore largement utilisée par la communauté
scientifique pour décrire les robots en vue de leur analyse et/ ou
modélisation; quelques variantes relativement proches sont aussi
courantes, comme par exemple la notation Paul, cette notation se
différencie, essentiellement, de celle de Denavit-Hartenberg, par
l'assignation des paramètres, relativement aux liens, (décalage
des indices).
Les étapes à suivre pour cette technique sont les
suivantes :
1ére. Numérotation des segments
constitutifs du bras manipulateur de la base vers l'élément
terminal, on associe le référentiel "zéro" à la
base de celui-ci, et l'ordre "n" à l'élément terminal
(effecteur).
2éme.Définition des axes principaux de
chaque segment :
· Si zi et z i-1 ne se coupent pas, on choisit
xi de manière à être en parallèle avec l'axe
perpendiculaire à z i et z i-1.
· Si zi et zi-1 sont colinéaires, on
choisit xi dans le plan perpendiculaire à zi-1. 3éme . Fixer les
quatre paramètres géométriques : di, Oi, ai et ai, (voir
la figure 2.2) pour chaque articulation tels que :
· di. est une coordonnée de l'origine oi sur l'axe z
i-1 pour une glissière di est une variable et pour une
charnière di est une constante.
· Oi. est l'angle que l'on obtient par vissage de x
i-1 vers xi autour de l'axe z i-1 pour une
glissière Oi c'est une constante et pour une charnière Oi c'est
une variable.
· li. est la distance entre les axes z i et z
i-1 mesuré sur l'axe xi négatif à partir de son
origine jusqu'à l'intersection avec l'axe z i-1.
· a i. est l'angle entre l'axe zi et z
i-1 obtenu en vissant z i-1 vers zi autour de xi .
4éme . On forme enfin, la matrice homogène de Denavit-Hartenberg
de déplacement qui lie la rotation et la translation, la partie
supérieure gauche définit la matrice de rotation Ri-1
et le vecteur de translation à droite i
di -1.
Par la suite on aboutit à la matrice de transformation de
Denavit-Hartenberg suivante :
a i - 1
cos è è
- sin0
i i

d i
1 =
- -
sin sin
á á
- -
1 1
i i
sin è á è á
cos cos cos
i i i i
- 1
T -
i ? sin sin cos sin cos cos
è á è á á á
i i i
-
- -
1 1 d
?
i
(2.2)
i
i i i
- -
1 1
0 0 0 1
Finalement on peut écrire le modèle
géométrique direct sous la forme :
X= f (q) (2.3)
Avec X ? 6
Rles coordonnées cartésiennes, et q? 6
R , les coordonnées articulaires, on va admettre
quelques hypothèses [12 , 27, 29, 30, 31] dans le but de simplifier la
modélisation des robots, ces hypothèses sont les suivantes :
Les liaisons du manipulateur sont rigides.
Les jeux dans les articulations sont négligeables.
Les capteurs ont un gain unitaire et de dynamique
négligeable
L'orientation d'un repère est donnée par une
matrice 3x3, représentant les 3 vecteurs unitaires. On a cependant
indiqué que dans ces 9 valeurs, plusieurs sont redondantes et qu'en
fait, il est possible de donner l'orientation en donnant simplement 3 valeurs.
Supposons, par exemple, qu'on désire avoir un robot qui suit une
certaine trajectoire dans l'espace en lui donnant un certain nombre de points
intermédiaires à passer. Si chacun des points est donné
par 3 positions et une matrice d'orientation 3x3, cela risque de prendre assez
de mémoire, il est préférable de ne prendre que 3 chiffres
pour l'orientation, en fait il y a une infinité de choix possibles pour
définir une orientation d'un repère par rapport à un
autre, l'idée est de trouver 3 transformations qui vont faire passer le
premier dans le deuxième, on peut adopter la paramétrisation
d'Euler ZYZ, chaque liaison d'un manipulateur fait des rotations ou des
translations par rapport au référentiel d'inertie fixe, par
exemple, un repère fixé à la base du robot.
Le calcul des coordonnées des liaisons du manipulateur
exprimées dans le référentiel d'inertie de la base est
relativement difficile, cette difficulté augmente suivant l'ordre de la
liaison jusqu'à l'élément terminal; pour ne pas alourdir
les calculs et ramener toutes les informations géométriques au
repère d'inertie de la base, il est judicieux de localiser les
articulations correspondantes et situer chaque liaison à son propre
référentiel.
Le passage d'un référentiel à un autre est
garanti par les transformations homogènes. Lorsqu'on a uniquement des
rotations, on se satisfait d'une matrice de transformation R de
troisième ordre, et lorsqu'il existe une translation autour d'un point,
on est obligé de passer à une matrice de quatrième ordre
pour permettre au référentiel de transformer, dans ce cas le
vecteur de position ap sera augmenté par une quatrième
composante pour avoir un vecteur de position ap' exprimé par
ses coordonnées homogènes [27, 30] :
? P ?
x
? ?
(2.4)
p= ? Py ?
? ?
? Pz ?
Le vecteur homogène correspondant est :
? P ?
x
? ?
? Py ?
Pz
? ?
(2.5)
? 1 ?
p ' = ? ?
La matrice augmentée de transformation aura la forme
suivante [27, 30] :
?
(2.6)
r r r d ? 11 12 13 x
?
? ?
r r r d
21 22 23 y ?
T =
? ?
r r r d
31 32 33 z
? ?
? 0001 ?
Avec rij les composantes de la matrice de rotation
R1 et dx, dy et dz sont les composantes du
vecteur de translation qui comportent les coordonnées du repère
de destination dans le repère source. Si on appelle T la matrice de
transformation du référentiel (x1,y1,z1) vers le
référentiel (x2,y2,z2) alors P' x2 y2 z2 = T P' x1 y1 z1 .
(2.7)
| 

