3. Estimation de la position du rotor
3.1. Synthèse de l'Observateur
réduit
Ici le vecteur d'état est : x ( ù
m i q ) '
= On veut simplement reconstruire la vitesse
mécanique ùm car
déjà iq peut être obtenue par mesure. On
définit donc un observateur d'ordre très réduit (ordre 1).
On reconstitue une seule valeur du vecteur d'état.
1
v a a v b
& 11 12
u
2q
= +
y a a y b
& 2 1 22
y i
= q
On considère
ù m = v : Nouveau vecteur
d'état
y=iq : sortie
u = uq : entrée
z =v à - gr ·
y : telle que gr : Gain de l'observateur
réduit.
Entrée : a11y +
b1u Nouvelle entrée de l'observateur
réduit Sortie : y&- a22y -
b2u
49
v a v a
& = +
y
+ b u
1
11 12
|
y & =
|
a 22
|
y b
- 2
|
u a v
= 21
|
3.1.1. Principe de l'observateur
réduit
( ) [ ( ) ] ( )
a gra z a gra gr a gra y b grb u
à
11 21 11 21 12 22 1 2
z & =
- + - + - + -
v z gry
= +
Avec (a11
-gra21)=F
F a g a
= -
11 21
r
- k k
F gr g
L
e e
= -
0 = r
L
Ici :
a 11 0
a k J
=
12 T
a k J
= -
21 e


a 22 = - ô

b 1 0
b L
2
= 1
3.1.2. Détermination des matrices de
l'observateur
On se donne le polynôme caractéristique f (
s ) = ( s - ë0 )
f s s sI
F
( ) ( ) ( )
= - = -
ë det
0
k
det e
( )
sI F s g s
- = - = - ë
r 0
L
k L
ë ·
e 0
ë = g g =
0 r r
L k e
On note
z A z B u K i
& = + +
0 0 0
à
q q
ù = +
Dz g y
m r
avec :
A a g a F
= - =
0 11 21
r
A 0 ë 0
ë ë
L 1
0 0
B b g b B
= - = - ·
0 1 2

( ) 0 = -
r keL ke
0
50
K A g a g a
= + -
0 0 12 22
r r
ë ë ë ë
K L
= ë . .
0 0 k
k L L R
2
- R k
.
0 0 0 0
T T

+ - = + +
J k L k k J
e e e e
kT
2 . L R k
+
K K R L
ë ë ë ë
0 0 T 0
= + = + +
( )
0 k J k J
0 0
e e
D 0 1
On retrouve en fin de compte :

ë · L ë ë k
= A 0 = ë 0 0
0
g =
r B0 ke K R L
= - ( )
+ ë +
0 T
0 0
k k J
e e
On représente l'observateur dans le schéma de
principe de la figure suivante avec toutes les matrices utilisées.
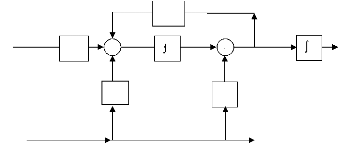
uq
B0
A0
àx& xà
gr
K0
y
iq
+
và
+
à
èe
Figure II. 49 : Schéma de principe de
l'observateur réduit de vitesse
3.2. Estimation de la position du rotor
Ici nous utilisons une intégration de la vitesse pour
estimer la position du rotor. Cette méthode pose d'énormes
problèmes notamment dans la simulation que dans le cas réel de la
pratique à cause des bruits que peut engendrer l'intégration et
le fait de ne pas maîtriser la contrainte de la valeur initiale de
l'arbre du rotor.
3.3. Choix des valeurs propres
Par la même philosophie que précédemment,
le choix des valeurs propres de l'observateur dépend de la dynamique du
procédé. Nous choisissons des valeurs propres qui ne varient pas
en fonction de la vitesse.
Nous utilisons cet observateur pour réaliser la boucle
fermée dans la commande vectorielle. Les résultats de simulation
sont présentés dans la section qui suit.
51
4. Simulation sous MATLAB SIMULINK
4.1. Résultats de simulation et
interprétations
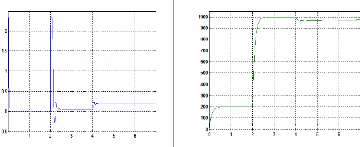
Nous simulons la commande vectorielle de notre machine avec
cet observateur dans le cas idéal sans bruit. Nous remarquons que
l'erreur de vitesse converge vers zéro sans problème (Figure
II.53), tandis que concernant l'erreur de position, elle dépend de la
charge contrairement aux deux observateurs antérieurement
présentés. Ceci est du au fait que la position est
déterminée par intégration de la vitesse qui
elle-même est estimée par cet observateur qui prend en compte
l'équation mécanique où on a négligé le
couple de charge dans les calculs. Dès que l'on applique le couple de
charge à vide qui est 0, 14Nm, l'erreur de position augmente. Elle
augmente aussi avec l'échelon de vitesse. Nous avons dans la Figure
II.54 une erreur de 0,2rad pour la position électrique soit 11.42°
contre 1° pour le cas des deux observateurs étudiés plus
haut.
temps (s)
temps (s)
Figure II.50 : Couple électromagnétique
(Nm) Figure II.51 : Vitesses estimée et mesurée
tr/min
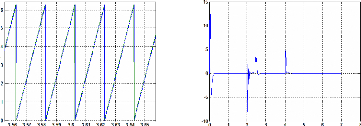
Figure II.52 : positions estimé et mesuré
(rad) Figure II.53 : erreur de vitesse (tr/min)
52
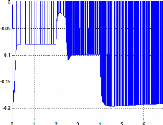
temps (s)
Figure II.54 : erreur de position elec
(rad)
5. Conclusion
Dans cette section nous avons présenté
l'étude d'un observateur réduit de vitesse basé sur le
modèle de la machine dans le référentiel de Park. Cet
estimateur, contrairement aux deux autres étudiés dans ce
même chapitre, est moins performant et moins robuste. Les résultas
de simulation confirment cette affirmation, car nous remarquons que même
dans les conditions idéales sans bruits ni OFFSET, l'erreur de position
de converge pas. D'autant plus que lorsque nous appliquons le couple ne charge
à vide, nous remarquons, contrairement aux deux autres modelés
proposés précédemment, que l'erreur de position augmente.
C'est-à-dire qu'elle augmente avec la charge donc ceci est un point
faible par rapport aux deux premiers. En ce qui concerne la partie
expérimentale, nous n'allons pas mettre en oeuvre ce dernier
observateur, nous nous contentons de la comparaison des deux premiers.
V. CONCLUSION
L'étude faite dans ce chapitre est basée sur la
synthèse des observateurs de position destinés à la
commande sans capteur de la MSAP. Nous avons étudié en premier
lieu un Observateur d'état qui reconstitue le vecteur d'état
composé des composantes des flux statoriques et rotoriques dans le
référentiel biphasé (a,p). Ensuite nous
utilisons la relation
liant l'angle électrique Oe aux deux
composantes du flux rotoriques(cb m a ,cb m p).
Dans le
modèle d'état que nous nous basons pour faire la
synthèse de cet observateur, la matrice d'état A dépend de
la pulsation rotorique alors que cette dernière est étroitement
liée à la position électrique. Mais nous avons
considéré le fait que la variation de la vitesse rotorique est
très lente par rapport à la fréquence
d'échantillonnage donc nous considérons le modèle comme
linéaire. Nous avons utilisé une méthode basée sur
un calcul direct pour estimer la valeur de la pulsation rotorique
we . Avant de passer à la simulation de la commande
sans
capteur en utilisant notre observateur, nous avons pris le
soin de détailler le principe ainsi que le calcul des paramètres
de l'observateur. Les résultats de simulation prouvent bien la
robustesse de l'observateur et le choix des valeurs propres.
53
Vu que l'on s'intéresse seulement à deux
grandeurs du vecteur d'état, nous avons pensé à
réduire l'ordre de notre observateur dans le but de diminuer un peu le
temps de calcul et d'alléger le programme. C'est ainsi que nous avons
proposé un observateur d'ordre deux basé sur le même
modèle. L'idée est la même et nous avons utilisé la
même méthode d'estimation de la vitesse qui marche aussi bien en
régime permanent qu'en régime transitoire. Après avoir
rappelé le principe d'un observateur d'ordre réduit, nous avons
présenté le calcul des différentes matrices de
l'observateur en se basant sur le polynôme caractéristique que
nous nous imposons au début.
Les résultats de simulation de la commande vectorielle
en utilisant cet observateur réduit confirment l'efficacité de
notre reconstructeur, car après avoir testé la commande sans
capteur avec la charge au couple de charge à vide nous avons fait la
simulation avec un couple résistant égal à la charge
nominale qui est 0.8Nm et nous avons remarqué que l'erreur reste
toujours très négligeable environ 2,6° électrique
soit 0.8° d'erreur pour la position mécanique. Concernant les
simulations en pleine charge nous avons toujours considéré les
perturbations au niveau des entrées de nos observateurs.
En troisième position, nous avons étudié
un observateur réduit qui est largement moins performent que les deux
premiers. Néanmoins, nous avons pris le soin de présenter dans
chapitre les calculs des paramètres ainsi que les résultats de
simulation de ce dernier.
54
| 

