3.4. Equation mécanique
L'équation fondamentale de la dynamique s'écrit:
d d
Ù = ? = è = è
2 2
J d e
dt dt p dt
em r 2 2
m
J C C J
3.5. Modèle de la machine dans le repère
triphasé abc
On établi le modèle de la machine à partir
des équations suivantes.
v R i L di
= . + . +
a p a a c dt
d Ö fa R i L di
. Ù . = . + . +
ea
a
a c
d è dt
e
|
v R i L di
= . + . +
b p b b c dt
|
d Ö fb = . + . +
R i L di b
. Ù . e
b c
d è dt
e
|
b
|

v R i L di
= . + . +
c p c c c d t
d Ö fc = . + . +
e c
R i L di c
. Ù .
dt
c c
dèe
d d
Ù = ? = è = è
2 2
J d e
m
J C C J
dt dt p dt
em r 2 2
d d d
Ö Ö Ö
C p i i i
. . .
fa fb fc
= + +
em a b c
d è d è d è
e e e
4. Commande vectorielle de la MSAP
Notre objectif étant d'établir les conditions
pour que le couple développer par la machine soit à valeur
moyenne non nulle et, autant que possible, exempt d'ondulations, la solution
adaptée est d'injecter dans les trois enroulements des courants dont la
forme dépendra de l'expression des f. e.m induites dans les
trois phases. Nous pouvons constater que le fait d'injecter des courants
fonction de la position angulaire èe revient à
autopiloter la position angulaire du champ tournant statorique au champ
tournant rotorique.
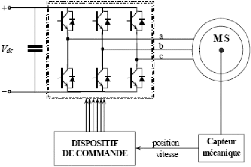
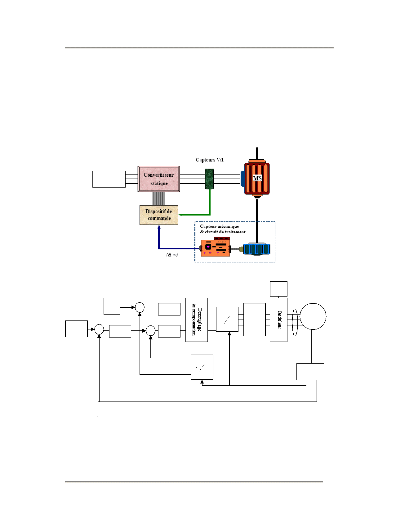
Figure I.7 : Schéma synoptique de la commande
avec onduleur contrôlé en courant
4.1. Hypothèses simplificatrices
On considère que :
V' les circuits magnétiques ne sont pas saturés,
l'hystérésis et les courants de Foucault sont négligeables
: les inductances ne dépendent pas des intensités des
courants et les pertes fer sont nulles.
V' les résistances des enroulements ne varient pas en
fonction de la température. V' les inductances sont indépendantes
de la position du rotor. Ld=Lq=Lc
4.2. Stratégies de Commande
On dispose trois stratégies qui permettent d'optimiser
certains critères. On peut envisager en régime permanent:
V' d'obtenir un couple maximum pour un
échauffement donné, V' de minimiser le dimensionnement
du variateur,
V' de fonctionner au-delà de la vitesse nominale.
On envisage dans notre cas la première stratégie
: avoir un couple maximum pour un échauffement donné. Le couple
sera maximum pour un échauffement donné donc pour un courant
donné, si l'on maintient Ø à zéro et le flux
inducteur à sa valeur maximale (Figure I.8).
Avec cette condition : (En négligeant la chute de tension
dans la résistance R)
11
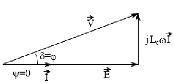
Figure I.8 : Diagramme vectoriel pour la
stratégie 1 (Couple maximal Ø=0)
4.3. Modélisation de la machine dans les
référentiels diphasés 4.3.1. Modélisation de la
machine dans le référentiel de PARK
di
v R i L p L i
d
= +
. . - ù
di
v R i L e
= + +
a
. .
a a c a
dt
di
v R i L e
= + +
b
. .
b b c b
dt
di
v R i L e
= + +
c
. .
c c c c
dt
d d c m c q
dt
di
v R i L p L i p
q
= +
. . + ù + ù Ö
q q c m c d m m
dt
3
Cem = p Ö m = K T
i q
2
d ù
J C C f C
m = - - ù -
em r m s
dt
Ce modèle sera utilisé pour la commande vectorielle
à flux rotorique orienté. 4.3.2. Modélisation de
la machine dans le
référentiel(á,â)
4.3.2.1. Transformation de Concordia
1 1
- -
2 2 2
3 3 3
0
xá
xâ
1


2 2
xa
xb
xc
4.3.2.2.Equation aux tensions de la machine :
di
v R i L e
= + +
a
. .
a a c a
dt
di
v R i L e
= + +
b
. .
b b c b
dt
di
v R i L e
= + +
c
. .
c c c c
dt
di
v R i L e
á = á + + á
á
. c .
dt
di
v R i L e
â = â + + â
â
. c .
dt
12

má
eá
d Ö
dt
Avec :
d Ö
=
mâ
eâ
dt
On sait que :
Ö á,â
=Liá , â +Ö m
(è)
m á â,
d Ö áâ =
á â
di d Ö
, ,
+
L .
dt dt dt
C'est sur ce modèle que nous allons nous baser pour faire
notre observateur (chapitre2). 4.4. Principe de la commande
vectorielle
Stratégie de commande vectorielle
considérée : Elle consiste à maintenir le courant
id nul et réguler la vitesse via la
tensionuq. Lorsque id est nul, le modèle de la PMSM
se réduit à celui d'un MCC à excitation
indépendante. La relation couple - courant est linéaire:
3
Cem = p Ö m
=KT i q
2
4.4.1. Compensation et découplage
Le modèle de l'équation de la machine est
couplé, il faut donc réaliser un découplage et une
compensation afin d'avoir un modèle complètement
découplé et compensé.
+
pùmLciq
di
découplage
v R i L p L i
d
= +
. . - ù
d d c m c q
dt
di
v R i L p L i p
q
= +
. . + ù + ù Ö
-
q q c m c d m m
dt
p ù m L c i
d -
pùmÖm
découplage et compensation

On obtient ainsi le modèle découplé et
compensé suivant :
|
u R i L
= +
. .
d d c
|
did
dt
|
|
u R i L
= +
. .
q q c
|
di q
dt
|
Et les mêmes équations mécaniques en ne
tenant pas compte du couple de frottement sec : 3
Cem = p Ö m = K
T i q
2
d ù
J C C f
m = - - ù
em r m
Chapitre 1 : Modélisation de la MSAP et Etat de l'art
de la commande sans capteur
La synthèse des régulateurs sera basée sur
ce modèle avec ces équations complètement
indépendantes.
| 

