4.4.2. Schémas de principe de la commande
vectorielle
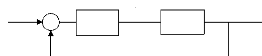
Nous rappelons ici le schéma de principe de la commande
de notre machine. Le convertisseur statique est alimenté par une source
de tension VDC, les signaux de commande proviennent de la modulation
à largeur d'impulsion venant du dispositif de commande qui a pour
entrées les tensions et les courants statoriques, la position et la
vitesse mesurées ou estimées.
Réseau
Figure I.9 : Schéma synoptique de la structure
autopiotée avec capteur
VDC
id
+
+
-
PIi
dq
abc
MS
MLI
ùref
+
+
-
PIi
+
PIù
+
-
iabc
dq
abc
Capteur
èe
ùm
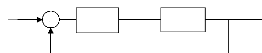
Figure I.10 : Schéma bloc de principe de la
commande vectorielle à flux orienté
4.4.3. Synthèse des régulateurs
On se base sur le modèle compensé et
découpé de la MSAP suivant:
14
ud = R.id
(s) + Lsid(s) uq =
R.iq (s) + Lsiq(s) 3
Cem = p Ö m = KTiq
2
d ù
J C f
m = - ù on néglige pour
un premier lieu le couple résistant.
t
em m
d
4.4.3.1.Boucle de courant (boucle interne)
I s R H s
d ( ) 1 1 ( )
= = = 1
L
+ s
R
de même 2
H s
s
R

u s R Ls
( ) 1
+
d
I s
( ) 1
( ) = =
R
q
u s L
q ( ) 1 +
On a : 1 ( ) 2 ( ) ( )
H s H s H s
= = =
1
1 L
k = et e
ô = constante de temps électrique R
R
k
avec
+ ô s
e
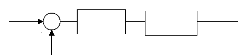
On a le schéma synoptique suivant :
Ud Id
*
H1(s)
+
-
+
PI
Id*
Figure I.11 : Boucle de courant Id
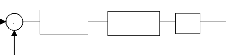
&
* Uq *
Iq + PI
-
+
H2(s)
Iq
Figure I.12 : Boucle de courant Iq
On veut corriger ce système avec un PI de la forme
k k k
ii ii pi
PI ( ) (1 )
s k s
= + = +
pi s s k ii
Premier indice pour proportionnel (p) ou intégral
(i)
Deuxième indice pour le courant (i) ou la vitesse
(ù)
k k
PI s s
( ) (1 )
= s + ô la fonction de transfert en
boucle ouverte est (1 ) (1 )
kii H s
ii
i BO = + +
s s
ô ô
e
k
On pose pi
ô == ôe
k ii
k k
pour compenser le pôle. On obtient ii
H = iBO s
et
H iBO
H iBF
1+
H iBO
HiBF
1 1
1+
11 + ô s s i
kk ii
avec 1
ô = Normalement on doit choisir ô i
<< ô e pour imposer
i kkii
une dynamique un peu plus rapide.
Calcul des paramètres
kii et
kpi : D'une manière
générale pour ôi choisie :
|
k pi 1
= ô k k
= · avec
k R
e pi ii
ii
|
1 1 1 1
LL
k k k
= · = · · =
ii pi
k ôRkôô
pi
i i i
|
R
Et 1 1
k k
= ·
ii ii
kô ô
i i
k
On a pi
k ii

= ô, on prend ôi =
ô e
e
k 11
pi = k R
= =
k k k k
pi
.
ii ii
1 1 1 L
= ô k R L
= · = · =
k k k R
e ii
· ô
ii e
Les deux chaîne de calcul des courants id et iq
sont totalement indépendantes :
4.4.3.2.Boucle de tension (boucle de vitesse)
La boucle de courant de iq est à
l'intérieur de la boucle de tension. Au fait le courant de
référence iq et déterminé par la boucle de
vitesse.

ùref
(rad)
+
-
+
PIù (s)
Iq*
HiBF(s)
Iq
KfT r
1+
ô s
m
ù
Figure I.13 : Boucle de tension (boucle de
vitesse)
Hypothèses :
v On néglige le couple de charge en le considérant
comme une perturbation.
v On considère que la boucle de courant est assez rapide
qu'on puisse le modéliser par un gain unitaire, on a donc :
PIù (s)
+
+
HiBF (s)
Iq*
ù
(rad)
ùref
-
Figure I.14 : simplification de la boucle de
tension
K
= et ' T
k =
fr
Avec m
ô
J
fr
De même on veut un PI pour la boucle de tension de la
forme
|
PIù
|
k k k
( ) (1 )
s k s
= + = +
i i p
ù ù ù
p ù s s kiù
|
on fait un placement de pôle (1 +
ôms) = (1 + ôs)
|
|
PI s s
ù = + ô
( ) (1 )
ki ù
s
|
k
avec p
ô = = ô
ù
m
k iù
|
idem que la boucle de courant.
|
La fonction de transfert en boucle ouverte de processus est :
k k k k k k k
' ' ' '
· ·
( ) (1 ) ( )
i ù i ù i ù
H PI s
= · = + · =
ù ô H s =
BO 1 1
m BO
s s s
+ +
ô ô
s s
mm
Enfin la fonction de transfert en boucle fermée est
donnée par :
1 1
H H
==
BF
BF 1 1
s
1+
+ ôù 0 s
1
avec 0
ô =
ù
k' k i
· ù
k k
'· i ù
En considérant la vitesses du rotor en tr/min on a :
ùref
(tr/ min)
+
-
+
PIù(s)
Iq*
HiBF(s)
g
ù
Figure I.15 : Boucle de vitesse en tenant compte de
ùref ( tr / min)
Avec 60
g=
gain permettant de passer de rad/s vers tr/min
2ð
HBF
1 1 1
= = ô =
1 '
0 s s g k k
ù
1+
ô ô
ù ù
+ · · i ù
g
Calcul des paramètres k i ù et kp
ù :
k p ù

= ôm
fr
=
k 1
i ù
On a k =
g k g k
· · ·
ô m
1 '
· ô
T m
i ù
k p /
J f J
ù ô ô ô
ô
k k f
r
= m p m i
ù ù
= · = · =
· · · ·
r
k g k g k
i ù T m T m
On trouve enfin les paramètres du correcteur PI de la
boucle de tension :
kiù
k p ù
f r
g k
·
· ô
T m
J
g k
· · ô
T m
| 

