|
CHAPITRE -I-
MODELISATION DE
L'ASSOCIATION
CONVERTISSEUR-MACHINE
ASYNCHRONE
I. 1. INTRODUCTION
Le contrôle et la sûreté de fonctionnement
d'une machine asynchrone, requièrent une approche pluridisciplinaire
associant la physique, l'automatique et l'informatique industrielle de
manière à appréhender la globalité des
phénomènes.
La conception d'une chaîne de commande passe par une
phase de modélisation, afin de dimensionner et de valider les
stratégies de commande appliquées. Dans ce qui suit, nous
proposons la modélisation de l'association convertisseur
statique-machine asynchrone qui comporte :
La modélisation du redresseur et du filtre ;
La modélisation de l'onduleur de tension et de sa
commande.
Les machines électriques alimentées par les
convertisseurs statiques sont utilisées comme des actionneurs rotatifs
dans beaucoup d'équipements industriels à vitesse variable. Les
caractéristiques exigées de l'actionneur dépendent
à la fois, de la machine, de son alimentation et de la commande de
l'ensemble (Figure-I-1-) [Bara-93].

Figure-I-1- : Ensemble actionneur
Ces caractéristiques sont :
- Un couple avec le minimum d'ondulations possible,
contrôlable par le plus petit nombre de variables, en régime
dynamique comme en régime permanent ;
- Une large plage de variation de vitesse ;
- Des constantes de temps électriques et
mécaniques faibles [Bara-93].
I. 2. MISE EN ÉQUATIONS DE LA MACHINE
ASYNCHRONE
I. 2. 1. Description
La machine asynchrone représentée sur la figure
(Figure-I-2-) est constituée :
- D'un stator, qui comporte trois phases identiques
décalées dans l'espace d'un angle de 2/3. Ce bobinage
est relié à une source de tensions alternatives d'alimentation
triphasée.
- D'un rotor, (à bagues où à cage
d'écureuil), comportant trois phases identiques qui sont
également décalées dans l'espace d'un angle de
2/3, mais qui sont court-circuitées.
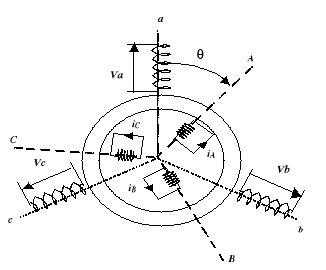
Figure-I-2- : Représentation de la machine
asynchrone
I. 2. 2. Hypothèses
simplificatrices
Afin de développer un modèle permettant une
bonne description de la dynamique de la machine asynchrone qui est
employée dans les étapes de conception et de la mise en oeuvre
des différentes stratégies de commande présentées
dans ce projet, il faut admettre comme approximation les hypothèses
simplificatrices suivantes :
- Les circuits magnétiques ne sont pas saturés
et sont parfaitement feuilletés ;
- Seuls les enroulements sont parcourus par des courants,
dont la densité est supposée uniforme dans la section des
conducteurs, (on néglige l'effet pelliculaire) ;
- La répartition des forces magnétomotrices
dans l'espace est sinusoïdale (on ne tiendra compte que du fondamental)
[Chat-83].
I. 2. 3. Equations aux tensions
Dans les conditions citées ci-dessus, les tensions
statoriques et rotoriques, représentées sur la figure
(Figure-I-2-) seront données comme suite :
Au stator :
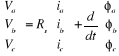 (I-1)
(I-1)
Au rotor :
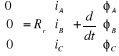 (I-2)
(I-2)
Les équations de fonctionnement de la machine seront
données par les deux relations matricielles suivantes :
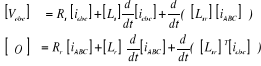 (I-3) (I-3)
avec :
 ; ;  (I-4) (I-4)
 (I-5) (I-5)
On voit bien que le système d'équations
(I-3) est à coefficients variables de . Sa résolution
analytique dans ce repère reste très complexe. D'où la
nécessité d'introduire la notion de transformation
trigonométrique, ceci pour aboutir à un système à
coefficients constants.
I. 3. MODÈLE DE PARK DE LA MACHINE
ASYNCHRONE
Afin d'aboutir à un modèle mathématique
plus simple que le modèle réel du système, nous
utiliserons des transformations orthogonales. Nous obtenons donc, des
équations plus simples par des changements de variables
appropriés. Parmi ces transformations, nous utiliserons celle de
PARK [Chat-83]. La figure
(Figure-1-3-) représente clairement cette transformation des
axes réels « a, b, c » aux axes « d et q
».
Figure-I-3- : Passage du triphasé au
biphasé
d
s
q
Vqs
iqs
iqr
Vds
ids
idr
iA
iC
iB
(a) A
a
b
B
A
C
Va
Vc
Vb
a
c
I. 3. 1. Transformation de
PARK
Cette transformation est définie par sa matrice
[A()] telle que :
 (I-6) (I-6)
Les courants, les tensions et les flux se transforment de la
manière suivante :
 (I-7)
(I-7)
Les vecteurs [idq],
[Vdq] et [dq] sont les vecteurs obtenus
par la transformation de PARK de ceux des vecteurs réels
[iabc], [Vabc] et
[abc].
La matrice de PARK écrite sous cette forme est
orthogonale, ce qui conduit à l'égalité des valeurs
efficaces des grandeurs physiques dans les deux repères. De ce fait, la
conservation de la puissance pour ce changement de repère est
vérifiée.
L'orthogonalité nous permet d'écrire :
 (I-8)
(I-8)
Donc :
 (I-9) (I-9)
I. 3. 2. Application de la transformation de PARK
à la machine asynchrone
I. 3. 2. 1. Equations des
tensions
En appliquant la transformation de PARK
aux équations (I-1) à (I-7), nous
obtenons le système d'équations
suivant [Barr-82] :
 (I-10)
(I-10)
avec : 
Notons que, l'angle « » prend la valeur
« s » pour les grandeurs
statoriques et la valeur « s - » pour les
grandeurs rotoriques.
I. 3. 2. 2. Equations des flux
Les relations entre les flux et les courants sont
données par [Barr-82] :
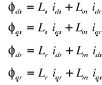 (I-11)
(I-11)
I. 4. CHOIX DU
RÉFÉRENTIEL
On distingue trois types de référentiels,
à savoir :
- Référentiel lié au stator ;
- Référentiel lié au rotor ;
- Référentiel lié au champ tournant.
Dans notre étude, nous allons travailler avec le
référentiel lié au champ tournant.
I. 4. 1. Référentiel lié au
champ tournant
Ce référentiel est caractérisé par
« e = s », dans ce cas les
grandeurs rotoriques et statoriques en régime permanent, sont continues.
Il est donc préférable d'utiliser ce référentiel
lors de l'étude de la commande de la machine asynchrone.
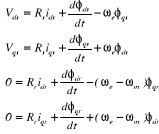
Les équations de la machine dans ce repère
s'écrivent de la manière suivante :
 (I-12)
(I-12)
avec :

I. 5. CALCUL DU COUPLE
ÉLECTROMAGNÉTIQUE
Le couple électromagnétique est
défini par la relation suivante :
 (I-13) (I-13)
D'où :
 (I-14)
(I-14)
I. 5. 1. Equation
mécanique
En appliquant les lois fondamentales de la dynamique à
la machine, l'équation mécanique sera donnée par la
relation suivante :
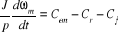 (I-15)
(I-15)
Ainsi l'équation mécanique peut être
formulée de la façon suivante :
 (I-16)
(I-16)
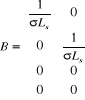
I. 6. MISE SOUS FORME D'EQUATION
D'ETAT
Nous choisissons dans tous ce qui suit, le vecteur  comme vecteur d'état et les grandeurs Vds
,Vqs comme variables de commande. Ainsi, nous exprimons { comme vecteur d'état et les grandeurs Vds
,Vqs comme variables de commande. Ainsi, nous exprimons { } en fonction du vecteur choisi, d'où : } en fonction du vecteur choisi, d'où :
 (I-17)
(I-17)
En remplaçant qs,
ds, en fonction de
qr, dr, dans le
système (I-12), nous aboutissons aux équations
suivantes :
 (I-18) (I-18)
D'après (I-12) nous aurons :
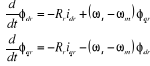 (I-19)
(I-19)
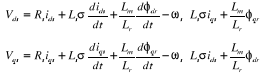
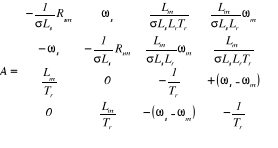
Le modèle mathématique de la machine asynchrone
sous les hypothèses citées et avec une alimentation en tension,
en fonction des variables d'état est donné par le système
suivant :
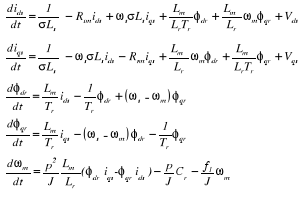 (I-20) (I-20)
avec  ; ;  ; ; 
I. 7. MODELISATION DE L'ALIMENTATION DE LA
MACHINE
Nous présentons la modélisation de
l'étage d'alimentation de la machine asynchrone qui est composé
d'un onduleur de tension, contrôlé par la technique de modulation
de largeur d'impulsion (MLI), et d'un redresseur à diodes
alimentant cet onduleur. Un filtre passe-bas a été introduit afin
de filtrer la tension redressée et de réduire les ondulations du
courant d'entrée (Figure-I-4-).
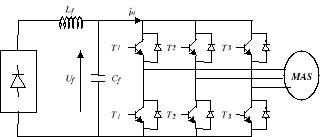
Figure-I-4- : Association redresseur - filtre -
onduleur de tension - MAS
I. 7. 1. Modélisation du
redresseur
Le redresseur peut être schématisé par la
figure (Figure-I-5-).
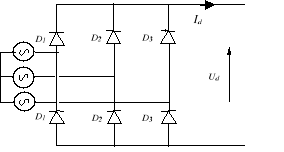
Figure-I-5- : Redresseur
à diodes.
Di conduit si Vi =
max (Vj) ; j=1,2,3 ; i=1,2,3
(I-21)
Di' conduit si Vi =
min (Vj) ; j=1,2,3 ; i=1,2,3
Pendant chaque séquence de conduction la tension de
sortie du redresseur Ud est :
 (I-22)
(I-22)
avec :
Vi = max(V1 , max(V2 ,
V3))
(I-23)
Vk = min (V1 , min(V2 ,
V3))
(I-24)
Par conséquent :
 (I-25)
(I-25)
I. 7. 2. Modélisation du
filtre
Le filtre ( LC ) est
schématisé par la figure suivante (Figure-I-6-):
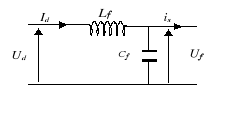
Figure-I-6- : Filtre (LC)
Ce filtre est modélisé par les équations
suivantes :
 (I-26)
(I-26)
La fonction de transfert du filtre est donnée par la
relation suivante :
 (I-27)
(I-27)
C'est un filtre de deuxième ordre avec une
fréquence de coupure égale à :
 (I-28)
(I-28)
Le choix des valeurs de l'inductance et de la capacité,
peut être obtenu en posant la condition simple qui consiste à
éliminer les harmoniques d'ordre supérieur à deux, ceci
étant vérifié par le fait qu'elles ont une
fréquence égale ou supérieur à deux fois celle du
fondamental, ce qui conduit à la condition suivante :
fc 2f donc
Lf Cf 2.77 10-6
nous choisissons Lf Cf = 25
10-6 et nous optons pour les valeurs suivantes
[Bens-95] :
Lf = 100 mH ; Cf = 250
uF
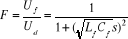
I. 7. 3. Modélisation de l'onduleur de
tension
L'onduleur utilisé est un onduleur à trois
bras, dont chaque bras est constitué par deux interrupteurs
bidirectionnels. Un interrupteur est composé par un transistor
Ti et d'une diode Di. La commande des
transistors est complémentaire, d'où nous pouvons remplacer
chaque bras de l'onduleur par un interrupteur à deux positions
(Ki) comme indiqué sur la figure
(Figure-I-7-).
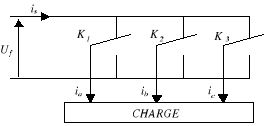
Figure-I-7- : Représentation des transistors
par des interrupteurs
On définit les fonctions logiques de connexion par
(i = 1, 2, 3) :
0 si Ti est fermé
et Ti' est ouvert
Fi =
(I-29)
1 si Ti est ouvert et
Ti' est fermé
Les tensions de sortie de l'onduleur sont données
par :
Vab = Uf
(F1 -F2)
Vbc = Uf
(F2 -F3)
(I-30)
Vca = Uf
(F3 -F1)
Par conséquent, les tensions simples sont
exprimées de la manière suivante :
 (I-31)
(I-31)
Le courant is à l'entrée de
l'onduleur sera donné par la relation suivante
 (I-32)
(I-32)
I. 8. MODULATION DE LARGEUR D'IMPULSIONS
(M.L.I)
La stratégie triangulo-sinusoïdale
:
La (M.L.I), permet l'obtention des alternances de la
tension de sortie qui est formée de plusieurs créneaux. Ceci peut
être fait en adoptant des techniques de commande des interrupteurs, il en
existe plusieurs, à savoir la stratégie triangulo-
sinusoïdale, la stratégie hystérésis
[Abde-99]. Dans ce travail, nous nous
intéressons à la première technique.
Cette stratégie dont le principe est basé, sur
la variation de l'amplitude de la référence
« vr1 », et la fixation de celle de la porteuse
« up1 », qui est représentée par
un signal triangulaire.
L'onde de sortie, est alors obtenue par une simple comparaison
des deux ondes, donnant ainsi l'ordre d'allumage où d'extinction aux
composants constituant l'onduleur.
Dans cette technique (Figure-I-8-), il faut
définir deux paramètres qui sont :
- L'indice de modulation « m » qui
représente le rapport entre la fréquence de la porteuse
« fp » à la fréquence de la
référence « f »
désirée.
- Le coefficient de réglage en tension
« r » qui représente le rapport entre
l'amplitude de l'onde de référence à la valeur de
crête de l'onde porteuse.
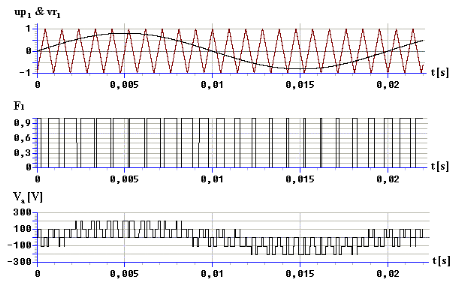
Figure-I-8- : Principe de la technique
triangulo - sinusoïdale
(m = 21, r = 0.8)
I. 9. MODELE DE L'ASSOCIATION
CONVERTISSEUR-MACHINE
Cette association, peut être schématisée par
la figure (Figure-I-9-)
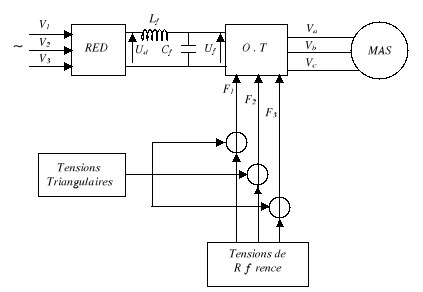
Figure-I-9- : L'association convertisseur-
machine
Ainsi, nous présentons le modèle de cette
association sous forme d'équation d'état telle que :

I. 10. SIMULATION ET
INTERPRÉTATION
Les figures (Figure-I-10-a-) et (Figure-I-10-b-),
représentent les résultats de simulation de l'association
convertisseur-machine asynchrone respectivement à vide et lors d'une
application d'un couple résistant de 10 N.m entre t = 0.5s
et t = 1s.
Ainsi, nous remarquons que :
- Le couple électromagnétique varie en premier
lieu d'une façon très oscillatoire, il atteint une valeur de
crête d'environ 60 N.m au démarrage, ceci pour
vaincre l'inertie du moteur, ensuite, il revient à une valeur qui
compense les pertes par frottement une fois le régime permanent est
atteint, ceci d'une façon peu oscillatoire.
- La vitesse de rotation atteint, la vitesse du synchronisme
(1500 tr/mn) après le régime transitoire qui dure
environs 0.38s.
- Les flux rotoriques (respectivement, direct
dr et en quadrature qr ) atteignent les
valeurs de (-0.96 Wb respectivement -0.05 Wb) en
régime établi.
- La forme du courant statorique ia est
proche d'une sinusoïde, ceci au régime établi et avec une
même fréquence que celle du réseau. Sa valeur de
crête est de 3.60A or pour le régime transitoire, il a
une valeur de crête d'environs 20A.
- Enfin, pour une perturbation de 10 N.m, nous
constatons une diminution de la vitesse. Les flux rotoriques direct et en
quadrature sont également affectés par cette perturbation, ce qui
explique le fort couplage existant entre les enroulements de la machine.
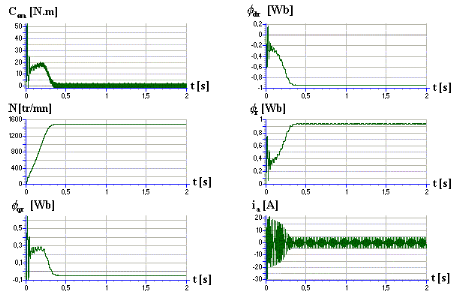
Figure-I-10-a- : Conduite du moteur
asynchrone alimenté par un onduleur commandé par la technique
triangulo - sinusoïdale (m = 21,r = 0.8)
à vide.
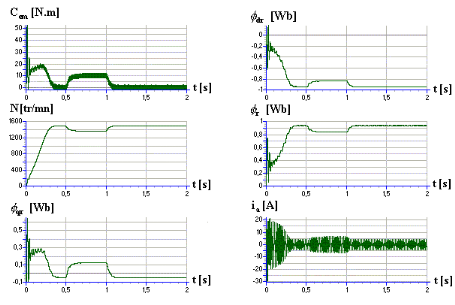
Figure-I-10-b- : Conduite du moteur
asynchrone alimenté par un onduleur commandé par la technique
triangulo - sinusoïdale (m = 21, r = 0.8)
avec introduction d'une charge de 10 N.m entre
t = 0.5s et t = 1s
I. 11. CONCLUSION
Dans ce chapitre, nous avons modélisé
l'association convertisseur-moteur asynchrone en vue de l'étude de ses
performances, l'onduleur étant contrôlé par la
stratégie triangulo- sinusoïdale.
Dans la plupart des entraînements utilisant ce genre de
moteur, une perturbation influe considérablement sur la vitesse
d'entraînement, donc sur la grandeur à commander. Ceci rend le
fonctionnement en boucle ouverte très fragile, ne répondant pas
aux exigences d'un entraînement à vitesse constante. Ceci est
dû au fort couplage entre les enroulements du moteur.
Pour remédier à cette difficulté et
rendre le modèle de la machine simple et découplé, nous
appliquons à cette dernière une commande à flux
orienté.
CHAPITRE -II-
COMMANDE VECTORIELLE
DE LA MACHINE ASYNCHRONE
| 

