|
Table des matières
|
Introduction générale
1 Le problème de la stratégie de Rendez-vous
|
1
3
|
|
1.1
|
Introduction
|
3
|
|
1.2
|
Agents et Systèmes multi-agents
|
3
|
|
|
1.2.1 Définitions
|
3
|
|
|
1.2.2 Architectures des SMA
|
5
|
|
|
1.2.3 Classification des agents
|
7
|
|
|
1.2.4 Domaines d'application des SMA
|
9
|
|
|
1.2.5 Quelques exemples de SMA
|
9
|
|
1.3
|
SMA et robots mobiles
|
11
|
|
|
1.3.1 Définitions
|
11
|
|
|
1.3.2 Application des SMA aux robots mobiles
|
12
|
|
|
1.3.3 Exemples de SMA réalisés en robotique
|
12
|
|
1.4
|
Stratégie de Rendez-vous des SMA
|
13
|
|
|
1.4.1 Situation du problème
|
13
|
|
|
1.4.2 Définition de la stratégie
|
13
|
|
|
1.4.3 Exemples d'application de la stratégie
|
14
|
|
|
1.4.4 Les différentes approches adoptées
|
14
|
|
1.5
|
Conclusion
|
14
|
|
2
|
Différentes approches de la stratégie de
rendez-vous
|
15
|
|
2.1
|
Introduction
|
15
|
|
2.2
|
La poursuite cyclique
|
15
|
|
|
2.2.1 Préalables mathématiques
|
16
|
|
|
2.2.2 Poursuite cyclique traditionnelle
|
19
|
2.2.3 Poursuite cyclique hiérarchique 20
2.2.4 Poursuite cyclique à L liens 24
2.2.5 Comparaison et taux de convergence 25
2.3 Le rapetissement de polygone 29
2.3.1 Préalables mathématiques 30
2.3.2 Rapetissement par la courbure de Menger-Melnikov 33
2.3.3 Le schéma linéaire 35
2.3.4 Remarques 35
2.4 Conclusion 35
3 Mise en oeuvre de la simulation 37
3.1 Introduction 37
3.2 Vérification et implémentation des algorithmes
sous Matlab 38
3.2.1 Résolution de la dynamique du système 38
3.2.2 Implémentation des algorithmes et tracé des
trajectoires sous Matlab 39
3.3 Mise en oeuvre de la simulation 45
3.3.1 Cahier de charge du simulateur 47
3.3.2 Conception du simulateur 47
3.3.3 Réalisation de l'interface graphique 53
3.4 Conclusion 56
4 Résultats et discussions 57
4.1 Résultats obtenus sous Matlab 57
4.1.1 Comparaison entre les méthodes 57
4.1.2 Mise à l'échelle du nombre de couches dans un
schéma hiérarchique 59
4.1.3 Mise à l'échelle du nombre de liens dans un
schéma à L liens 59
4.2 Résultats de la simulation 59
4.2.1 Poursuite cyclique 61
4.2.2 Rapetissement de polygone 62
4.2.3 Remarques 63
4.3 Conclusion 63
Table des figures
|
1-1
|
Interaction d'un agent avec son environnement
|
4
|
|
1-2
|
Architecture d'un SMA à contrôle centralisé
|
6
|
|
1-3
|
Architecture d'un SMA à contrôle distribué
|
6
|
|
1-4
|
Structure d'un agent réactif dans un environnement
multi-agents
|
7
|
|
1-5
|
Structure d'un agent cognitif dans un environnement
multi-agents
|
8
|
|
2-1
|
la structure d'une poursuite cyclique traditionnelle à 4
agents
|
19
|
|
2-2
|
Structure d'un schéma hiérarchique à 2
couches (9 agents, 3 groupes)
|
22
|
|
2-3
|
Trois couches d'hiérarchie dans une poursuite cyclique
|
23
|
|
2-4
|
Structure d'une poursuite cyclique de 5 agents à 2 liens
|
25
|
|
2-5
|
La dynamique du rapetissement de courbe
|
32
|
|
2-6
|
Rapetissement de polygone
|
33
|
|
2-7
|
Le cercle circonscrit de 3 points de la courbe
|
34
|
|
3-1
|
4 agents dans une poursuite cyclique traditionnelle
|
41
|
|
3-2
|
16 agents dans une poursuite cyclique hiérarchique
à 4 couches
|
43
|
|
3-3
|
8 agents dans une poursuite cyclique à 4 liens
|
44
|
|
3-4
|
Rapetissement par Menger-Melnikov d'un polygone formé
par 16 agents
|
46
|
|
3-5
|
Rapetissement par le Schéma linéaire d'un groupe
de 16 agents
|
46
|
|
3-6
|
Diagramme de classes
|
49
|
|
3-7
|
Diagramme de séquences
|
54
|
|
3-8
|
Interface principale de la simulation
|
55
|
|
3-9
|
Rapport des résultats
|
56
|
|
4-1
|
Les 3 méthodes de la poursuite cyclique d'un groupe de
16 agents
|
58
|
|
4-2
|
Trajectoires des deux méthodes du rapetissement de
polygone
|
59
|
|
4-3
|
La poursuite cyclique hiérarchique de 16 agents en
fonction du nombre de couches. . .
|
60
|
4-4 La poursuite cyclique à 4, 8 ou 12 liens 60
4-5 Le comportement observé des agents avec la
méthode de Menger-Melnikov 62
Introduction générale
Parmi les domaines d'application de la robotique, nous
trouvons les missions de sauvetage où la présence de l'homme est
menacée et telles que des robots sauveteurs doivent se réunir
à un lieu donné pour effectuer cette mission au même
moment. Plusieurs stratégies sont nécessaires pour effectuer une
navigation fiable de robots mobiles dans un environnement contraint, l'une
d'elles est la convergence à un point de rendez-vous.
Dans une telle situation, on cherche à concevoir une
stratégie de rendez-vous d'un groupe de robots mobiles autonomes et
homogènes, formant un système multi-agents. Dans ce
mémoire, ce problème a été étudié et
les solutions proposées dans la littérature notamment par Stephen
L. Smith[1], ont été testées. Les travaux de Smith
s'intéressent au développement d'algorithmes pour l'allocation de
tâches dans des groupes de robots mobiles.
Inspirés par ses travaux et par sa thèse de
master sur les stratégies de rendez-vous et de stabilisation de
formations, nous allons implémenter deux approches de la
stratégie de rendez-vous dont la poursuite cyclique et le rapetissement
de courbe.
Notre travail se compose de quatre chapitres. Le premier
représente une synthèse bibliographique sur les systèmes
multi-agents appliqués dans le domaine de la robotique et à la
stratégie de rendez- vous.
Au second chapitre, une description analytique approfondie de
notre système et des différentes solutions proposées sera
établie. Le système est composé de n agents se situant
dans un plan complexe, chaque agent peut détecter les positions de
certains des autres agents, selon la méthode employée. Un agent
considéré comme leader doit initialiser tous les agents avec les
informations nécessaires à l'accomplissement de la
stratégie. Un rapport entre les taux de convergence des
différentes méthodes est calculé pour comparer entre
elles.
Au troisième chapitre, une mise en oeuvre des solutions
proposées au chapitre 2 sera réalisée. Dans un premier
temps, nous allons vérifier la validité et la convergence des
algorithmes sous matlab, et tracer les trajectoires effectuées par les
agents. Ensuite, une interface graphique sera réalisée,
permettant de simuler les différentes approches de cette
stratégie, visualiser le comportement des
agents et calculer certaines valeurs d'évaluation.
Finalement, nous discuterons les résultats obtenus par
la simulation et présenterons les avantages et les inconvénients
de chaque méthode, ainsi que les éventuelles difficultés
rencontrées dans l'implémentation des algorithmes.
Chapitre 1
Le problème de la stratégie de
Rendez-vous
1.1 Introduction
Dans ce chapitre, le problème de rendez-vous est
présenté où un ensemble d'agents mobiles réalise
une convergence à un point commun. Pour cela, nous commencerons par
présenter un aperçu sur les systèmes multi-agents, leur
application aux robots mobiles et plus précisément à la
stratégie de rendez-vous. Les différentes approches
présentées dans la thèse de Stephen L. Smith [1] seront
étudiées dans le chapitre 2.
1.2 Agents et Systèmes multi-agents
1.2.1 Définitions
· Agent
Un agent est une entité (physique ou abstraite)
caractérisée par le fait qu'elle est autonome dans la prise de
décision, par ses connaissances sur elle même et sur les autres,
et par sa capacité d'agir.
Ce peut-être un processus (en gestion des processus dans
les systèmes d'exploitation), un robot (dans un environnement
industriel), un être humain (en sociologie), etc.
Pour Weiss (1999), un agent est une "entité
computationnelle", comme un programme informatique ou un robot, qui peut
être vue comme percevant et agissant de façon autonome sur son
environnement. voir figure 1-1
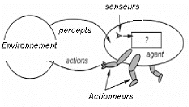
FIG. 1-1 - Interaction d'un agent avec son environnement
Caractéristiques d'un agent:
- un agent est une entité autonome mais fortement
dépendante des autres.
- un agent communique à l'aide de messages, ou par partage
d'informations. - un agent est autonome, il peut refuser de faire ce qu'on lui
dit de faire.
- les agents peuvent être spécialisés: un
agent ne sait pas faire beaucoup de choses mais
ce qu'il sait faire, il le fait vite et bien et le met en commun
avec les autres agents.
· Système multi-agents
Un système multi-agents (SMA) est constitué d'un
ensemble de processus informatiques se déroulant en parallèle,
donc de plusieurs agents vivant au même moment, partageant des ressources
communes et communicant entre eux.
Le point clé des SMA réside dans la formalisation
de la coordination entre les agents.
Partant de la définition que donne Ferber(1995) [2]
d'un agent logiciel, on peut définir cette entité comme un
système informatique situé dans un environnement, capable de
mener de manière autonome des actions sur cet environnement en vue
d'accomplir ses objectifs, possédant en plus les
propriétés de :
Réactivité : il perçoit des stimuli
provenant de son environnement et réagit en fonction de ceux-ci.
Proactivité : il est mû par un certain nombre d'objectifs qui
guident ses actions.
Sociabilité : il communique avec d'autres agents ou des
humains et, peut se trouver engagé dans des transactions sociales
(négocier ou coopérer pour résoudre un problème)
afin de remplir ses objectifs.
On parle ainsi d'intelligence artificielle distribuée.
L'une des grandes sources d'inspiration pour les
systèmes multi-agents a été l'étude des
comportements sociaux de certaines familles d'insectes. Dans ce domaine, on se
référera utilement aux articles Intelligence collective et
Intelligence distribuée.
Les SMA peuvent être vus comme la rencontre de divers
domaines :
· l'intelligence artificielle pour les aspects prise de
décision de l'agent.
· l'intelligence artificielle distribuée pour la
distribution de l'exécution.
· les systèmes distribués pour les
interactions entre agents.
· le génie logiciel pour l'approche agents et
l'évolution vers des composants logiciels de plus en plus autonomes.
Les SMA peuvent être partagés en deux types
d'architectures [3], en fonction du type de contrôle adopté :
SMA à contrôle centralisé ou a base de
tableau noir
Composé de trois éléments :
- Les connaissances représentées par les
agents.
- Le tableau noir: qui est une zone de travail commune,
dévolue à la transition d'informations entre les
différents agents. Chacun peut venir le consulter à sa guise, y
prélever et y déposer des objets qu'il peut également
modifier. Le tableau structure la modélisation du domaine d'application
comme l'espace des hypothèses et des solutions.
- Le mécanisme de contrôle : concerne les
contraintes sur les relations entre les conversations des protocoles qui
régissent le système, et au quels l'agent peut participer
simultanément ou successivement.
Le SMA à contrôle centralisé possède
en outre les propriétés suivantes :
- Pas de communication directe entre les agents.
- Interaction via le partage d'un même espace de travail
qui est le blackboard. - Mal adapté aux SMA large échelle.
SMA a contrôle distribué
- Une distribution totale des connaissances et du
contrôle.
- Caractéristiques :
· Traitement local.
· Communication entre agents par envoi de messages.
- Le langage d'Acteur est la technique la plus utilisée
pour la mise en oeuvre de ce type
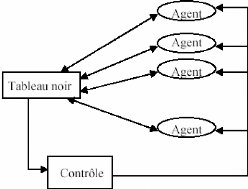
FIG. 1-2 - Architecture d'un SMA à contrôle
centralisé
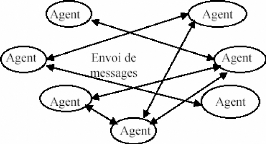
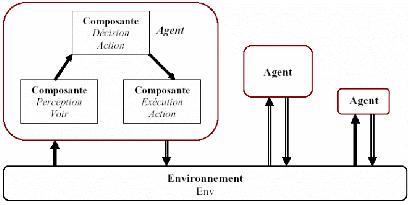
FIG. 1-4 - Structure d'un agent réactif dans un
environnement multi-agents
d'architecture. Un Acteur regroupe au sein d'une même
entité un ensemble de connaissances : les accointances, un script.
1.2.3 Classification des agents
Les experts des systèmes multi-agents ont
classifié ces derniers (agents) en deux grandes catégories selon
un critère essentiel qui est la représentation de son
environnement, et sont donc les agents réactifs et les agents cognitifs,
et les systèmes dits hybrides.
Agents réactifs
On parle ici de système intelligent d'agents. Les
agents sont simples et ne possèdent pas une représentation de
leur environnement, ni de mémoire, ce qui les prive d'apprentissage et
de toutes anticipations aux évènements. Ils sont
caractérisés par l'absence de structures organisationnelles
initiales prédéfinies, d'où les agents agissent
naturellement au moment où l'action est nécessaire. Leur
comportement est de type «stimuli - réponses».Voir figure
1-4
Les SMA dotés d'agents réactifs
possèdent généralement un grand nombre d'agents. Le
comportement de groupe est impressionnant lorsqu'il s'agit de coordonner
certaines actions, telles que leur déplacement.
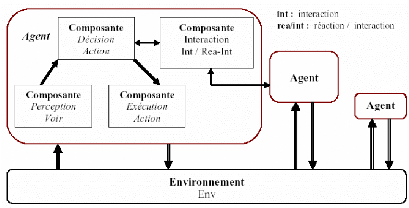
FIG. 1-5 - Structure d'un agent cognitif dans un environnement
multi-agents
Agents cognitifs
On parle ici de système d'agents intelligents. Les
agents cognitifs sont plus évolués, résultats des
recherches menées dans le domaine de l'intelligence artificielle. Ils
possèdent une représentation globale de leur environnement et des
agents avec lesquels ils communiquent, ils tiennent aussi compte de leurs
actions antécédentes. Chaque agent possède une base de
connaissances comprenant l'ensemble des informations nécessaires
à l'accomplissement de sa tâche, ainsi qu'à l'interaction
avec l'environnement et les autres agents. Voir figure 1-5
Les SMA constitués d'agents cognitifs compte un petit
nombre d'agents «intelligents», exigent des ressources plus
importantes que les agents réactifs, et permettent de résoudre
des problèmes plus complexes.
Agents hybrides
Ce type d'architecture combine les agents réactifs et
cognitifs, qui sont généralement distribués sur plusieurs
niveaux ou couches. La couche de haut niveau, délibérative,
rassemble des agents purement cognitifs, s'occupe du raisonnement et de la
prise de décision du système. La couche de bas niveau ne
rassemble que des agents réactifs qui exécutent
généralement des tâches élémentaires sous les
ordres de la couche supérieure ou par leurs propre initiative. La (les)
couches intermédiaires, peuvent regrouper les deux types d'agent
(réactifs et cognitifs), le nombre de couches intermédiaires
dépend du modèle du système à concevoir.
1.2.4 Domaines d'application des SMA
On distingue généralement 3 types d'utilisation
des systèmes multi-agents :
La simulation ou la modélisation de
phénomènes complexes
Où on utilise les SMA pour simuler des interactions
existantes entre agents autonomes. Le but est de déterminer
l'évolution de ce système afin de prévoir l'organisation
finale. Ce qui importe c'est le comportement d'ensemble et non pas le
comportement individuel. L'autonomie permet ici de simuler le comportement
exact d'une entité.
La première simulation utilisant les SMA, et qui
d'ailleurs fut la source d'inspiration de ceux-ci est le système MANTA
(simulation d'une fourmilière) [4].
La résolution de problèmes et prise de
décision
L'intelligence artificielle distribuée est née
pour résoudre les problèmes de complexité des gros
programmes de l'intelligence artificielle : l'exécution est alors
distribuée, mais le contrôle reste centralisé.
Contrairement aux SMA, où chaque agent possède un contrôle
total sur son comportement. Pour résoudre un problème complexe,
il est plus simple de concevoir des programmes relativement petits (les agents)
en interaction, qu'un seul gros programme monolithique. L'autonomie permet au
système de s'adapter dynamiquement aux changements imprévus qui
interviennent dans l'environnement.
Exemple : minimisation d'impact pour des aménagements
La conception de programmes
Intégrer un système d'information
constitué d'un ensemble d'agents organisés pour faciliter la
compréhension et la décision, soit individuelle, soit collective.
Contrairement à un objet, un agent peut prendre des initiatives, refuser
d'obéir à une requête, se déplacer . . .
Exemple : systèmes d'aide à la négociation
de projets
1.2.5 Quelques exemples de SMA
Les systèmes multi-agents associés à
l'intelligence artificielle représentent actuellement un grand domaine
d'application et de recherche. Plusieurs systèmes ont été
développés, nous présenterons ici quelques uns tels que
:
· Le système MANTA [4] : ce système
illustre parfaitement l'intérêt de la modélisation
multiagents de type réactif. Il modélise la constitution d'une
fourmilière mature à partir d'une ou
plusieurs reines, étudie la capacité d'adaptation
d'une telle colonie, le mécanisme de polyéthisme(division du
travail), et la spécialisation des ouvrières.
Cette simulation avait vérifié le fait qu'une
société d'agents peut bien survivre et s'organiser en
se
passant de tout système de contrôle centralisé et d'une
quelconque organisation hiérarchique.
· Le comportement de meute : les agents réactifs
se montrent capables d'évoluer parfaitement en groupe tout en
s'évitant mutuellement, constituant par là une meute aux
comportements très souples. Le premier à s'être
intéressé à ce comportement est Craig Reynolds (1987) [5],
il a créé des créatures appelées "Boïds", des
agents réactifs capables d'interagir pour réaliser un
comportement semblable à un vol d'oiseaux migrateurs, chacun des
Boïds se contentant d'appliquer un ensemble de règles
comportementales :
- Maintenir une distance minimale par rapport aux objets de
l'environnement y compris les autres Boïds.
- Adapter sa vitesse à la moyenne de celle de ses
voisins.
- Aller vers le centre de gravité de l'ensemble des
Boïds voisins.
Contrairement aux oiseaux, les Boïds évoluent
sans leader et sans contrôle global. Ils contournent tous ensemble un
obstacle tout en restant naturellement groupés.
· les systèmes industriels distribués :
où les concepteurs partent de problèmes réels existants et
ils cherchent à les résoudre en se basant sur les techniques
d'interaction et de coopération des systèmes multi agents.
Plusieurs systèmes ont été
développés dans les domaines de la
télécommunication, et de contrôle du trafic
aérien.
· Applications temps réel: Les agents ont
été bien évidemment appliqués au domaine des
systèmes temps réel; ce dernier maintient des systèmes
à contrainte souple. On voit de plus en plus des systèmes temps
réel dit Hard utilisant des agents.
· Applications agents pour le commerce
électronique : Le e-commerce signifie des échanges de produits
qui se passent via Internet. Les sites pour les ventes aux enchères,
pour les négociations entre les utilisateurs
(producteurs/consommateurs), etc.
· Applications agents pour la Recherche d'Information:
Une grande partie des applications de système multi-agents est dans le
domaine de recherche d'information. Parmi ces nombreuses applications dans ce
domaine, on peut trouver "NetSA" [6] : une architecture de système
multi-agents pour la recherche d'information dans des sources
hétérogènes et réparties.
Nous avons aussi les projets suivants : Phoenix (simulation
de contrôle de feux de forêts); Archon (gestion de réseaux
électriques); SimDelta (simulation de gestion de ressources
halieutiques); Smaala (aide à la localisation d'infrastructures
linéaires); Simpop (dynamiques urbaines); Swarm (simulation
d'écosystèmes); Gestion de trafic aérien ...
1.3 SMA et robots mobiles
Dans ce mémoire, nous étudierons une
stratégie de navigation d'un groupe d'agents (robots) autonomes,
constituant ainsi un système multi-agents.
La mise au point d'un système de navigation pour un
robot mobile représente un champ d'application privilégié
pour valider les notions d'agents autonomes et SMA. La robotique constitue
également un champ d'application fécond pour aborder
l'intelligence collective.
Après quelques définitions de termes
employés, nous aborderons les SMA et leur application dans le domaine de
la robotique.
1.3.1 Définitions
· Robot
Il existe plusieurs définitions d'un robot,
satisfaisant plusieurs domaines. La norme internationale ISO 8373 [7] a
définie un robot comme étant un manipulateur universel
programmable, automatiquement contrôlé, reprogrammable, ayant 3
axes ou plus, qui peut être soit fixé dans une place ou mobile
dans le cas des applications industrielles automatisées.
· Robot mobile
Un robot mobile est une machine automatique qui est capable de
naviguer dans un environnement, généralement non fixé
à un endroit physique.
Les robots mobiles sont le centre de beaucoup de recherches
courantes et presque chaque université principale possède un ou
plusieurs laboratoires de recherche des robots mobiles.
· Robot autonome
Les robots autonomes sont des robots qui peuvent accomplir
des tâches désirées dans des environnements contraints sans
assistance humaine continue. Ils peuvent également apprendre ou gagner
de nouvelles possibilités, comme ajuster les stratégies
d'accomplir leurs tâche(s) ou à s'adapter aux environnements
changeants.
Un degré d'autonomie élevé est souhaitable
dans les domaines tels que l'exploration de l'espace, où l'acquisition
de l'information est retardée et les interruptions sont
inévitables.
1.3.2 Application des SMA aux robots mobiles
Ces dernières années, plusieurs équipes
de recherche de robots mobiles intègrent les architectures de
systèmes multi-agents dans la navigation, les stratégies de
positionnement et les tâches que peut accomplir un groupe d'agents.
L'utilisation d'agents robotiques est bénéfique
dans le sens où, cela permet de limiter la perte de vies humaines dans
les milieux hostiles.
L'exemple d'application le plus courant est : la
collaboration d'un groupe de robots mobiles et l'exploration d'un environnement
contraint d'obstacles, en vue d'accomplir certaines tâches. Ce type de
problèmes peut facilement être modélisé en
appliquant un SMA. Vu sa complexité, le comportement global sera
distribué sur les agents, et chaque robot se doit d'être autonome
pour pouvoir réaliser sa tâche, s'adapter à l'environnement
et réagir aux évènements inattendus.
1.3.3 Exemples de SMA réalisés en
robotique
Plusieurs systèmes multi-agents ont été
développés dans le domaine de la robotique, nous citerons
seulement quelques uns dont le succès a attiré notre attention
:
· La reprise des travaux de Reynolds (comportement de
meute) par Mataric (1992 -94) [8] appliqués à des agents
réactifs robotiques. Un comportement de meute est obtenu par
pondération des comportements d'évitement d'obstacles, de
filature de robots, d'agrégation et de dispersion. Les résultats
ont été moins brillants que ceux de Reynolds, car il a
remarqué que les robots s'éloignent les uns des autres, ou au
contraire sont très compactés. Mais il a affecté ces
problèmes à la dynamique imparfaite de la mécanique des
robots ainsi qu'à la limitation de leurs capteurs.
· Le projet Mars Explorer [9] : Un projet
développé par l'équipe SMAC de l'université des
Sciences et Technologies de Lille, concernant le positionnement de robots
mobiles. Le but est d'avoir des robots qui explorent leur environnement et le
cartographient, pour qu'ils puissent se repérer et s'orienter dans un
environnement inconnu préalablement.
· Robots sauveteurs: Le projet AROUND (Autonomous Robots
for Observation of Urban Networks after Disasters) en partenariat avec le
Vietnam, est un système d'aide à la décision et qui vise
à développer des systèmes automatiques d'observation et de
surveillance. Il consiste à déployer et coordonner des robots
autonomes d'observations dans les zones urbaines victimes
de catastrophes.
· Et on conclue avec les recherches de Stephen L.
Smith (2005) [1] dans les stratégies de robots mobiles autonomes dont la
stabilisation à une formation, ou encore la stratégie de
Rendez-vous qui fait l'objet de notre projet.
1.4 Stratégie de Rendez-vous des SMA
La plupart des travaux actuels en système multi-agents
entraînent l'utilisation de stratégies simples de contrôle
local dans le but de réaliser un ou un groupe de comportements global
désiré. L'un des comportements étudiés dans ce
mémoire est « la convergence d'un groupe d'agents mobiles à
un point commun ».
C'est un type de problèmes de Rendez-vous appelé
aussi agrément ou problème de consensus. Nous étudierons
et comparerons ainsi les différentes approches et méthodes
initiées par S. L. Smith pour réaliser cette stratégie.
1.4.1 Situation du problème
Notre système multi-agents est tout simplement un
groupe d'agents. On impose une tâche désirée au SMA, un
agent superviseur doit initialiser les agents avec les informations
nécessaires à l'accomplissement de la tâche. A partir de ce
moment, et jusqu'à la fin, les agents agissent sans l'intervention du
superviseur. Ainsi les agents sont autonomes, et tentent d'accomplir la
tâche utilisant seulement leurs informations locales.
1.4.2 Définition de la stratégie
Considérons un groupe de « n » agents
réactifs numérotés de 1 jusqu'à n et situés
dans un plan supposé sans obstacles. La stratégie de rendez-vous
consiste à partir de positions initiales quelconques et à se
réunir à un point commun au même instant, ici c'est le
point centre de gravité.
Les agents ne sont pas tous dirigés dans la même
direction. Chaque agent, équipé d'un senseur omnidirectionnel, de
détection de positions relatives, avec une capacité de capture
supérieure à la dimension de son environnement, peut sentir la
position de tout autre agent.
Comme la communication est coûteuse, nous admettons que
moins il existe de liens entre les agents, mieux est la solution.
1.4.3 Exemples d'application de la stratégie
La stratégie de rendez-vous des SMA, associée
à d'autres stratégies et techniques de groupes de robots mobiles,
peut être utilisée, par exemple, dans les cas suivants :
Les missions de sauvetages, dans des milieux hostiles comme le
cas d'un incendie, où un nombre de robots mobiles sauveteurs doivent
arriver au même moment, pour pouvoir effectuer cette tâche.
- La recherche d'un objet dans une zone fermée, le
périmètre de cette zone est déterminé par les
agents qui sont équipés par des capteurs pour détecter la
pièce recherchée.
- Un groupe de robots se réunissant à un minerai,
pour extraire et/ou transporter la matière extraite.
- La commande automatique de véhicules ...
1.4.4 Les différentes approches adoptées
Il y eu deux approches dans l'étude des SMA. La
première fut l'utilisation de l'intelligence artificielle, et la
deuxième l'utilisation de l'analyse numérique pour l'étude
du comportement qui résulte de stratégies locales de
contrôle. Nous utiliserons la deuxième pour résoudre le
problème de rendez-vous.
Smith a introduit à son tour deux approches pour la
réalisation de cette stratégie, dont : la poursuite cyclique et
le rapetissement de courbe.
Dans chacune de ces approches, il a présenté des
méthodes possédant chacune des avantages et des
inconvénients. Dans le chapitre qui suit, une étude
détaillée de ces méthodes et une comparaison
théorique entre elles, seront données.
1.5 Conclusion
Dans ce chapitre, nous avons présenté une
brève introduction à la stratégie de rendez-vous, aux
systèmes multi-agents et leur application dans le domaine de la
robotique mobile pour mieux appréhender la suite du projet.
Chapitre 2
Différentes approches de la stratégie
de rendez-vous
2.1 Introduction
Dans ce chapitre, nous étudierons plus en détail le
problème de rendez-vous, les différentes approches
adoptées par Smith [1] ainsi que les méthodes
associées.
Un schéma analytique du problème sera
présenté pour chaque méthode, vu qu'on utilise l'approche
de calcul numérique, par référence aux travaux de
Smith.
Dans le but de concevoir une stratégie de rendez-vous,
plusieurs méthodes suivant différentes approches ont
été étudiées dans la thèse de Smith, et ce
dans le but de trouver la méthode la plus efficace, la plus rapide et
aussi la moins coûteuse. Dans la première partie de ce chapitre,
nous expliquerons la première approche, qui est la poursuite cyclique et
dans la deuxième, le rapetissement de courbe appliqué au SMA.
2.2 La poursuite cyclique
Il a été montré dans la
littérature que le point de convergence d'un groupe d'agents et les
mouvements des agents mobiles autonomes peuvent être commandés en
employant des lois de poursuite cyclique (généralement
utilisée dans la commande de véhicules).
Smith et autres ont mis en place un modèle
mathématique décrivant cette stratégie comme suit : un
groupe d'agents représentés par des points de masses,
numérotés de 1 à n, la position de chaque agent peut
être décrite dans un plan complexe par le point z = x + jy , i =
1, ..., n, avec j = J--1
z = x + jy
CHAPITRE 2. DIFFÉRENTES APPROCHES DE LA STRATÉGIE
DE RENDEZ-VOUS 16
La stratégie est telle que l'agent « i » chasse
l'agent « i+1 ». La vitesse de l'agent « i » en direction
de l'agent « i+1 » est donnée par le modèle suivant
:
_zi =zi+1-zj, i=1,...,n-1
(2.1)
_zri = z1 - zri.
Suivant ce schéma, les agents vont converger à
leur centre stationnaire. Plusieurs stratégies peuvent être
inspirées de ce modèle de base, c'est ce que nous verrons dans
cette section. Mais avant, nous allons définir quelques concepts
mathématiques utiles à la suite du chapitre.
2.2.1 Préalables mathématiques
Pour continuer, nous avons besoin de définir quelques
concepts mathématiques utiles à la conception de notre
système, tels que les matrices circulantes, et circulantes par blocs, la
diagonalisation de matrices circulantes...
Matrices circulantes
Considérons un n-uplets (c1, C2, C3, ...,
cri) de nombres réels. La matrice circulante, est une matrice
carrée (n x n) dont les lignes sont composées du n-uplet
décalé à droite cycliquement modulo n. La forme
générale d'une telle matrice est la suivante :
|
6 6
6 Cri C1 C2 ~ ~ ~ Cri_1
6 6
C = 6 Cri_1 Cri C1 ~ ~ ~ Cri_2
|
(2.2)
|
|
...
2 C1 C2 C3 ~ ~ ~ Cri
|
...
|
...
|
..
.. ..
|
C2 C3 C4 ~ ~ ~ C1
D'une façon plus explicite, nous écrirons :
C =: circ(c1, C2, C3, ..., cri)
Définition 2.1 En algèbre linéaire, une
matrice carrée M d'ordre n (nEN*) à coefficients dans un corps
commutatif K, est dite diagonalisable si elle est semblable à une
matrice diagonale, c'est-à-dire s 'il existe une matrice inversible F
telle que F _1MF soit une matrice diagonale.
CHAPITRE 2. DIFFÉRENTES APPROCHES DE LA STRATÉGIE
DE RENDEZ-VOUS 17
C =cnP n1 + cn_1P n2 + ... + c2P + c1I (2.3)
avec:
010---0
001---0
P= =circ(0,1,0,...,0) (2.4)
... ... ... ... ...
100---0
Remarque 2.1 Ceci découle du fait que:
P2 =circ(0,0,1,0,..0,0), P3=circ(0,0,0,1,0,..,0),
...
Après certaines transformations sur la matrice C, nous
obtenons la formule . 3. Définition 2.2 posons :
qc(s) = cnsn_1 + cn_1sn~2 +
... + c2s + c1s°
d'où:
C = qc(P)
Pour le calcul des valeurs propres de C, que nous noterons VP(C),
nous devons d'abord calculer les valeurs propres de la matrice P. Davis [10] a
montré que :
VP(C) = {qc(.X) : 2 VP(P)}
Par définition de la matrice P dans [10] :
VP(P) =
{1,e2~jIn,e4~jIn,...,e2(n_1)~jIn}
(2.5)
Posons w = e2~iIn d'où:
VP(P) = {1,w,w2,...,wn_1}
= VP(C) = fqc(1);
qc(w); qc(w2); :::;
qc(wn~1)g
Après quelques calculs [1], nous obtenons la matrice
diagonale:
CHAPITRE 2. DIFFÉRENTES APPROCHES DE LA STRATÉGIE
DE RENDEZ-VOUS 18
qc(1) 0
·
·
· 0
A= 0 qc(w)
·
·
· 0
0
·
·
· 0
qc(wn-1)
C = FAF* avec F la matrice inversible de passage de la
forme :
1
F=
,Vn
1 1
·
·
· 1
1 w
·
·
· wn-1
. .
. .
. .
... ...
1 wn-1
·
·
·w(n-1)(n-1)
De cette manière, nous aurons montré que la matrice
circulante est diagonalisable.
Matrices circulantes par blocs
La matrice circulante par bloc est une matrice circulante
où chaque réel dans la matrice 2.2 est remplacé par une
matrice carrée Di (m x m), elle a la forme suivante :
2 D1 D2 D3
·
·
· Dn
6 6 6Dn D1 D2
·
·
· Dn-1
6
D =6 6Dn-1 Dn D1
·
·
·
Dn-2
D2 D3 D4
·
·
· D1
C'est une matrice de dimension (nm x nm), et elle peu aussi
être écrite en fonction de la matrice P(n x n) :
D= P n-1
0Dn+Pn-20Dn-1+
·
·
·+P0D2+I0D1
Définition 2.3 0 représente le produit de
kronecker.
Le produit de kronecker entre deux matrices A(n x m) et B est
définie comme suit :
a11B
·
·
· a1mB
an1B
·
·
· anmB

FIG. -1 - la structure d'une poursuite cyclique traditionnelle
à 4 agents
Les valeurs propres de A ® B sont données par tous
les produits possibles entre les valeurs propres de A et B.
2.2.2 Poursuite cyclique traditionnelle
C'est le cas le plus simple de la poursuite cyclique,
où chaque agent poursuit l'agent qui le suit dans l'ordre de
numérotation, tel qu'il est décrit dans le système 2.1. Ce
système peut aussi s'écrire dans la forme vectorielle suivante
:
z_ = A1z (2.6)
où A1 = circ(--1, 1,0, ..., 0). La matrice A1 = P -- I
où P est donnée par 2.4. Smith a démontré le
théorème suivant dans sa thèse [1] :
Théorème 2.1 Considérons la poursuite
cyclique dans le schéma . 6, pour toute configuration initiale, le
centre des agents z1(t), z2(t), ..., z,(t) est stationnaire et tous les zi(t),
(i = 1,..., n) convergent à ce centre.
Le centre des agents est donc stationnaire, et est donné
à chaque instant "t" par l'expression
1
n
z~ =
X,
i=1
suivante :
zi(t) (2.7)
Exemple 2.1 Prenons le cas de 4 agents, la poursuite cyclique est
représentée par le schéma -1, et la matrice de
transformation est :
--1 1 0 0
0 --1 1 0
A1=
0 0 --1 1
1 0 0 --1
2.2.3 Poursuite cyclique hiérarchique
Dans cette partie, le concept d'hiérarchie est
introduit et appliqué à la poursuite cyclique. La
hiérarchie veut dire une organisation des agents selon une
hiérarchie de groupes en plusieurs couches. Le cas le plus simple est le
schéma hiérarchique à deux couches, en suite nous
étudierons un schéma plus général avec un nombre de
couches quelconque.
Schéma hiérarchique à deux couches
Dans ce cas, les n agents de la poursuite cyclique
traditionnelle sont répartis en n2 groupes de tailles identiques, chaque
groupe contenant n1 agents (n1 x n2 = n). La stratégie est donc que, les
agents d'un groupe sont en poursuite cyclique (traditionnelle), et leurs
centres respectifs le sont aussi. Ceci veut dire que le centre de chaque groupe
d'agents poursuit le centre du groupe suivant dans l'ordre de
numérotation des groupes.
Chaque agent est caractérisé par sa position,
dans un plan complexe, notée zi,j où i (i = 1, :::,
n2) représente l'indice du groupe, et j (j = 1, ..., n1) l'indice de
l'agent dans le groupe "i". Le schéma décrivant cette
stratégie, et ainsi les vitesses de déplacement des agents est le
suivant :
|
8
|
_z1,1 = z1,2 -- z1,1 + d1,1
|
|
|
|
|
|
|
|
|
<>>>>>>
|
_z1,2
= z1,3 -- z1,2 + d1,2
|
|
|
|
groupe 1
|
>>>>>>:
|
}
|
|
(2.8)
|
|
|
...
|
|
|
|
|
|
|
|
|
|
_z1,n1
= z1,1 -- z1,n1 + d1,n1
|
|
|
|
...
|
|
|
|
|
|
8
|
_zn2,1 = zn2,2 -- zn2,1 + dn2,1
|
|
|
|
groupe 2
|
<>>>>> >
|
_zn2,2 = zn2 ,3 -- zn2 ,2 + dn2,2
|
}
|
|
|
|
...
|
|
|
|
>>>>>>:
|
|
|
|
|
|
_zn2,n1
= zn2,1 -- zn2,n1 + dn2,n1
|
|
|
Où les di,j sont les déplacements des
agents, la question est donc, : comment choisir ces déplacements pour
réaliser la stratégie décrite par 2.8
L'équation de déplacement des centres, sachant
qu'ils réalisent une poursuite cyclique, est :
:
zi = ~zi+1 -- zi, i = 1, ..., n2 -- 1 (2.9)
:
~zn2 = ~z1 -- ~zn2
CHAPITRE 2. DIFFÉRENTES APPROCHES DE LA STRATÉGIE
DE RENDEZ-VOUS 21
1
n1
~zi =
Xn 1
j=1
où le centre du groupe "i" est donné par:
zi;j (j = 1, ..., n1) (2.10)
1
n1
:
~zi =
Xn 1
j=1
en dérivant ce système, nous obtenons la vitesse de
déplacement du centre du groupe "i" :
di;j (j=1,...,n1) (2.11)
car, d'après 2.8 :
Xn 1 _zi,j = Xn 1 di;j Vi=
1,...,n2
j=1 j=1
d'après 2.11 et en remplaçant dans 2.9, nous
obtenons :
|
Xn 1
j=1
|
:
di;j = n1 ~zi= n1(~zi+1 -
~zi) (2.12)
|
|
Pn2
=
i=1
|
Pn1
j=1
|
di;j = n1
|
n2
P
i=1
|
:
~zi = 0
|
= le centre des n agents est stationnaire.
Plusieurs di;j peuvent être choisis satisfaisant
2.12, l'un des choix : di;j = zi+1,j - zi,j.
Ceci veut dire que l'agent "j" dans le groupe "i" poursuit
l'agent "j" dans le groupe "i+1". Si on remplace les di;j par leurs
expressions dans 2.8, nous obtenons la dynamique de l'agent "j" du groupe "i"
:
_zi;j = zi,j+1 - zi;j + zi+1,j -
zi;j (2.13)
nous remarquons que l'agent "j" du groupe "i" a un lien avec
l'agent "j+1" du même groupe, et un lien avec l'agent "j" du groupe "i+
1". D'où chaque agent aura besoin de deux liens de communication
(capteurs). Avec cette stratégie, le système comporte 2n
senseurs.
L'équation 2.13 s'écrit dans une forme vectorielle
:
z_=Bz+Dz
où B est la matrice diagonale par blocs
représentant la poursuite cyclique à l'intérieur d'un
groupe.
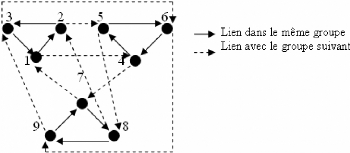
FIG. 2-2 - Structure d'un schéma hiérarchique
à 2 couches (9 agents, 3 groupes)
avec A1 = (P - I)(n 1Xn1) telle qu'elle est définie dans
la poursuite cyclique traditionnelle. La matrice D représente les
di;j et est donc de la forme :
D = circ(-1,1,0,...,0)(n2Xn2)®In1
= (P - I)(n2xn2) ® In1 = circ(-I, I,0,... , 0)
où In1 = S représente les connexions de chaque
agent dans un groupe aux agents du groupe suivant.
Un "1" dans la fg~emeposition de la matrice S (f,g =
1, ...,n1) indique que le f~eme agent dans un groupe détecte
le g~eme agent du groupe suivant (modulo n2).
posons A2 = B+D = circ(A1 -I, I,0, ..., 0), où A2 est une
matrice circulante à blocs de dimension (n x n) où chaque bloc
est de dimension (n1 x n1).
le système devient alors :
z_ =A2z
Exemple 2.2 Considérons un groupe de 9(n) agents, et un
schéma hiérarchique à deux couches, avec 3(n2) groupes de
3(n1) agents (voir figure 2-2). La matrice de transformation est donc :
|
2
-1 1 0
6
6
A2 = circ(A1 - I,I,0,...,0) avec A1 = 6 0 -1 1
4
1 0 -1
A2 = circ(-2, 1,0, 1,0,0,0,0,0).
|
= circ(-1, 1,0). et I =
|
100
010
001
|
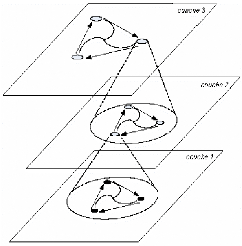
FIG. 2-3 - Trois couches d'hiérarchie dans une poursuite
cyclique
Schéma général
Dans un schéma plus général, nous avons L
couches d'hiérarchie. La première couche contient n1 agents, la
deuxième contient n2 sous-groupes de n1 agents, la troisième n3
groupes de n2 sous- groupes de n1 agents, ... (voir Figure 2-3)au total, nous
avons r'L nm = NL.
m=1
Le système est le suivant :
z_=ALz (2.14)
où z est un vecteur colonne de taille NL (le nombre
d'agents global), et AL est une matrice de dimension (NL x NL). Pour L = 1, la
matrice A1 = (P - I)n1~n1:
A chaque fois que nous ajoutons une couche, nous devons nous
assurer que le comportement de la couche inférieure reste stable. Ceci
veut dire que les agents / les groupes de la couche inférieure restent
en poursuite cyclique. Des senseurs sont ajoutés entre les centres des
groupes d'une même hiérarchie, pour qu'ils réalisent une
poursuite cyclique au niveau supérieur. Comme pour le schéma
hiérarchique :
- Les A1 au long de la diagonale représentent la poursuite
cyclique dans chaque groupe.
- Les "-I" au long de la diagonale, associés aux "I" au
long des blocs qui suivent, représentent les connexions entre les
groupes pour créer la nouvelle couche d'hiérarchie.
Chaque agent dans un groupe prend la position de l'agent dans le
groupe suivant moins sa propre
position, pour créer la nouvelle hiérarchie. Une
hiérarchie à L couches est décrite par le système
2.14 où, la matrice AL est obtenue de façon récursive
à partir de A1, de la façon suivante:
A1 = circ(-1,1,0,...,0) (2.15)
Am = circ(Am_1 - I,I,0, ..., 0) m = 2, ..., L
où Am est une matrice composée de
nm blocs de dimension Nm_1 X Nm_1.
Le nombre de liens de communication:
Nous remarquons que, pour mettre en place chaque nouvelle
couche, tout agent doit avoir un lien avec un agent d'un autre groupe, ceci est
décrit par la deuxième diagonale "I" dans 2.15. D'où
chaque agent aura L liens de communication avec les autres agents. Ainsi, le
système compte un total de LNL liens.
La question qui se pose naturellement est comment choisir la
distribution d'agents qui donne le meilleur taux de convergence (que nous
calculerons dans la dernière partie de cette section)? Smith [1] a
introduit et démontré le théorème suivant :
Théorème 2.2 Dans le cas où /NL est un
entier, la distribution uniforme des nm :
pn1 = n2 = ~ ~ ~ = nL = NL (2.16)
est une distribution optimale. De plus elle est la seule à
l'être. Sachant que la distribution optimale, qui satisfait
r'L nm = NL, est celle qui donne le taux de convergence
le plus important.
m=1
Remarque 2.2 Cette solution donne une augmentation dans le taux
de convergence équivalente à
RL = N2(n_1)' L
L que nous verrons ensuite comment calculer.
Remarque 2.3 Quand pNL n'est pas un entier, il peut exister
plusieurs distributions optimales.
Par exemple, pour NL = 12, L = 2, deux
solutions optimales : {n1, n2} = {3, 4} et {n1, n2} = {4, 3}.
2.2.4 Poursuite cyclique à L liens
En comparant, dans la partie qui va suivre, les deux techniques
étudiées précédemment, la pour-
suite cyclique
hiérarchique donne un taux de convergence plus élevé que
le schéma traditionnel.
Cependant, elle demande plus de liens de
communication entre les agents, chaque agent perçoit plus
d'un agent
contrairement au traditionnel où chaque agent ne capte que l'agent qui
le suit dans l'ordre.
Pour cette raison, un schéma
intermédiaire a été introduit où le nombre de
connexions entre
agents est inférieur au schéma traditionnel,
ou plus ou moins contrôlé, et où chaque agent chasse le
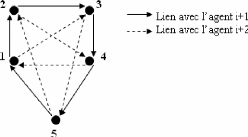
FIG. 2-4 - Structure d'une poursuite cyclique de 5 agents
à 2 liens.
centre d'un groupe d'agents.
Dans une poursuite cyclique à L liens, chaque agent
possède un lien de communication avec "L" agents. S'il y a NL agents,
alors il y aura un total de LNL connexions dans le système. La
stratégie que nous adopterons est la suivante :
Dans un système de NL agents, l'agent "i" poursuit le
centre des agents de "i+1" jusqu'à "i+L" (modulo NL). Formellement ceci
s'écrit :
1
L
_zi=
XL
m=1
zi+m(modNL) ~ zi i=1, . . . ,NL.
ou sous une forme vectorielle : _zi = Az avec ANLXNL
une matrice circulante de la forme :
,0,...0) (2.17)
| {z }
L uns
circ(--L,1,... 1
1
A= L
Exemple 2.3 Prenons le cas de NL = 5 agents, avec L = 2
(voirFigure e-4). la matrice de transformation A est la suivante :
A = 1 2circ(-2, 1,1,0,0) = circ(-1,1 2,
1 2,0,0).
2.2.5 Comparaison et taux de convergence
Dans cette partie, nous comparerons entre les trois
différentes méthodes de la poursuite cyclique. Cette comparaison
servira à faire une sélection entre les méthodes selon
différents facteurs, elle sera ensuite appuyée par les
résultats de notre simulation au dernier chapitre.
En plus du temps de convergence et de la vitesse moyenne des
agents calculés à la fin de la simulation, un rapport est
calculé pour exprimer l'augmentattion dans le taux de convergence
entre
chaque couple de méthodes : Schéma traditionnel /
l'hiérarchique, hiérarchique / Poursuite cyclique à L
liens et ce dernier / schéma traditionnel.
Définition 2.4 Le taux de convergence des agents
à leur centre est déterminée à partir de la valeur
propre non nulle de A2 avec la partie réelle absolue la plus petite,
nous appellerons cette dernière "valeur 'y".
Définition 2.5 L'augmentation dans le taux de
convergence (R) calculé représente la rapidité de
convergence du groupe d'agents au centre, avec une méthode
comparé à l'autre méthode, c'est un rapport entre les
parties réelles des valeurs 'y des deux différentes
méthodes :
Ï(valeur 'y(m~ethode 1))
R = Ï(valeur 'y(m~ethode 2)) Ï: La partie
réelle du nombre complexe.
Poursuite cyclique traditionnelle / hiérarchique
Soit : NL le nombre d'agents total.
Le taux de convergence correspondant à cette comparaison
est:
Ï(valeur 'yhier)(2.18) Ï(valeur 'ytrad)
RL = traditionnel
hierarchique
Pour trouver la valeur 'y, nous devons d'abord calculer les
valeurs propres de la matrice de transformation correspondant à la
méthode utilisé AL (A1).
D'après 2.15, la matrice Am est une matrice
circulante à blocs, ses valeurs propres sont donc :
VP(Am) = nm[ VP(Am_1 +
(e2~j(r_1)Inm - 1)I)
r=1
donc, les VP(Am) sont les nm ensembles de
VP(Am_1) décalées à gauche par am(r)
= e2~i(r_1)Inm1. Nous remarquons que :
-2< Ï(am(r))<0 Vr=1,...,nm.
car : Ï(om(r)) = cos(2r(r - 1)/nm) -
1. et -1 < cos(2r(r - 1)/nm) < +1.
Pour trouver la valeur 'y, nous devons d'abord déterminer
toutes les valeurs 'y possibles de VP(Am). Ces valeurs 'y
appartiennent aux ensembles des VP avec le décalage à gauche le
plus petit.
- Le premier ensemble des VP(Am), elles sont
simplement les VP(Am_1) décalées par am(1)
= 0, donc les valeurs 'y possibles de cet ensemble sont les valeurs 'y des
VP(Am_1).
- L'ensemble des VP avec le décalage suivant le plus
petit est donné par Am_1 + am(2)I (ou également
am(nm))[1]. Pour cet ensemble, la VP nulle de
Am_1(la VP la plus à droite) est décalée
à gauche de am(2). Elle est donc la valeur 'y de cet
ensemble, et est donnée par:
'ym := e2~jInm - 1
De cette façon, on constitue l'ensemble des valeurs 'y
possibles. Ensuite, la 'y-value des VP(Am) doit être, ou la
valeur 'y des VP(Am_1), ou bien 'ym. Ceci est un
schéma récursif, pour chaque couche ajoutée, une autre VP
est ajoutée à l'ensemble des 'y - values possibles. Plus
concrètement :
Pour la première couche, la valeur 'y des VP(A1) est : 'y1
:= e2~u/n1 - 1.
La deuxième couche, la valeur 'ye des VP(A2) est la valeur
'y des VP(A1) qui n'est autre que 'y1 ou bien : 'y2 := e2~3/n2 - 1.
De même pour la troisième couche, la valeur 'y des
VP(A3) est 'y1, 'y2 ou : 'y3 := e2~3In3 - 1.
...
Pour les VP(Am) la valeur 'y du schéma
hiérarchique à L couches est donnée par:
|
'y := e2~j' - 1 w = max
m
|
{nm}, m=1,...,L.
|
Pour la poursuite cyclique traditionnelle, il n'existe qu'une
seule couche donc, la valeur 'y est donnée par : 'y := e2~j'NL - 1.
Ainsi, à partir de 2.18 l'augmentation du taux de
convergence utilisant le schéma hiérarchique en comparaison avec
la poursuite cyclique traditionnelle est :
|
Hi~erarchique R = Traditionnel
|
<(e2~iI -
1)
<(e2~iINL - 1)
|
cos(2r/w) - 1
cos(2r/NL) - 1
|
Pour simplifier cette expression, nous remplaçons le cos
par son développement limité de l'ordre
1 avec :
cos(x) = Pn
i=0 (_1)i
(2i)! x2n + o(x2n) à l'ordre 2n avec
o(x2n) -! 0 cos(x) à l'ordre 1 : cos(x) = 1 -
1 2x2. d'où :
|
1_1 2 (2ir/$)2_1 R 1_ 2 1 (21r/NL)2_1
|
~ 2=$ ) 2 ~NL 2 ~ NL 2
= = =
21r/NL $ maxm{nm}
|
Remarque 2.4 Dans le schéma hiérarchique à
deux couches, le taux de convergence est directement:
max{n1, n2}
NL = min{n1,n2}2
(R2 =
2
Cas particulier: Lorsque n1 = n2 = /N2 les N2 agents convergent
approximativement N2 fois
plus rapidement utilisant le schéma hiérarchique
qu'utilisant la P.C traditionnelle.
.
Remarque 2.5 Pour la distribution optimale des nm,
trouvée précédemment concernant le schéma
hiérarchique général. Et d'après 2.16 Le taux de
convergence est :
~ (
( NL J 2 ~ 2 ~ J 2 ~ 2
L1
NL L
R L = NL ~ N_1IL = N2(L_1)=L
L pNL = = = N
N1/L L L L
L
Dans tous les cas, RL ~ 1 et donc, la convergence au centre
utilisant une hiérarchie se fait plus rapidement que le schéma
traditionnel.
Cependant, le schéma hiérarchique nécessite
plus de liens de communications que le traditionnel, d'où plus de
senseurs => il est donc plus coûteux.
Poursuite cyclique hiérarchique / à liens
De la même manière, nous retrouvons la valeur 'y de
la poursuite cyclique à L liens, pour la comparer à celle du
schéma hiérarchique, et calculer le taux de convergence.
D'après la formule 2.17 et utilisant la forme polynomiale
de la matrice A qui est : A = qc(P) avec : qc(s) = 1
LsL + 1 LsL_1 + ... +
1 Ls - s0,
VP(A) = ~qc(1), qc(w),
qc(w2), ..., qc(wNL_1)~
avec : w = e2~j=NL
La matrice A est circulante, elle possède donc une
seule VP nulle qc(1) et toutes les autres se situent dans la partie
gauche du plan. S.L. Smith [1] a montré qu'il faut que NL » L pour
que la valeur 'y des VP(A) soit donnée par qc(w) = 'y.
|
XL
1
'y = qc(w) = L(w + w2 + ~ ~ ~ +
wL) - 1 = 1
L
m=1
|
e2~jm=NL - 1
|
et la partie réelle de est :
|
XL
1
<('y) = L
m=1
|
(cos(2mr/NL)) - 1
|
CHAPITRE 2. DIFFÉRENTES APPROCHES DE LA STRATÉGIE
DE RENDEZ-VOUS 29
Ainsi, le taux de convergence est :
Hi~erarchique R = L-lien
cos(2r/w) - 1
(cos(2mr/NL)) - 1
=
avec w = max{n1, n2, ..., nL}
1
L
PL
m=1
Toujours en utilisant le développement limité du
cosinus, simplifions cette expression :
1_1 2 (2ir/$)2_1
R = PL
m=1
(27r $ )2
=
( 27r )2 1 PL
m2
NL L m=1
(NL )2
L ~ :
$
(1_1 2 ( 27rm
NL )2)_1
PL
m=1
1
L
m2
1
L
PL
m=1
De même, nous avons: R ~ 1 et donc, le schéma
hiérarchique à L couches converge plus rapidement que celui
à L liens, même s'ils demandent tous les deux le même nombre
de capteurs.
Poursuite cyclique à L liens / Traditionnelle
Dans les comparaisons précédentes, nous avons
calculé les valeurs 'y correspondant aux deux méthodes
respectives (traditionnelle, L-liens). D'où l'augmentation dans le taux
de convergence de la P.C à liens comparée à la
traditionnelle est la suivante :
L - liens
R = Traditionnelle
(cos(2mr/NL)) - 1
=
cos(2r/NL) - 1
Après simplification du cos par son développement
limité de l'ordre 1 :
(1_1 2 ( 27rm
NL )2)_1
1_ 1 2 (21r/NL)2_1
PL
Pm=1 2 ( 27r
1 NL )2 =m=
m2 ~ 1 = Les agents avec le schéma à L liens
R=
1
1_1 2 ( NL 27r )2
m2_1 L
1
L
PL
m=1
convergent plus rapidement qu'avec le traditionnel, mais
demandent plus de liens de communications et donc plus de senseurs.
2.3 Le rapetissement de polygone
Dans cette section, nous appliquerons la théorie du
rapetissement de courbe aux SMA. Si on considère que les agents
représentent les sommets d'un polygone, en utilisant les
résultats du rapetissement de courbe euclidien, nous prouvons que ce
polygone va se rétrécir jusqu'à devenir un point qui n'est
autre que le centre des agents, et par ce fait réaliser la
stratégie de rendez-vous.
Nous commencerons par un aperçu mathématique sur
la géométrie euclidienne, le rapetissement de courbe, les
différentes propriétés des polygones, ensuite nous
étudierons deux méthodes mise en oeuvre par S. L. Smith [1] qui
appliquent le rapetissement de polygone au problème de rendez-vous, dont
Menger-Melnikov, et un autre schéma linéaire.
Considérons toujours le système
représenté ci-dessous, où les z sont les positions des
agents et
_zi leur vitesses respectives :
p
zi = xi + jyi i = 1, . . . , n j = -1
_zi = ui
où ui est calculé en fonction de la méthode
utilisée.
2.3.1 Préalables mathématiques
Dans ce qui suit, et pour pouvoir poursuivre, un aperçu
sur la géométrie euclidienne, la dynamique du rapetissement de
courbe qui en dérive, ainsi que quelques propriétés des
polygones.
Géométrie euclidienne
Définition 2.6 Une transformation euclidienne de
R2 est une fonction L : R2 . R2, L(x) = Ux+a.
Où U est une matrice orthogonale (2 x 2), a 2 R.
U est une matrice orthogonale == U~1 = UT
L'ensemble des transformations euclidiennes est l'ensemble de
toutes les rotations, translations, réflexions d'une figure dans
R2. Autrement dit, la géométrie euclidienne est
l'étude des propriétés des figures qui restent
inchangeables par des transformations euclidiennes. Ces
propriétés euclidiennes comprennent la distance, la courbure et
la colinéarité des points.
Rapetissement de courbe euclidien
Soit une famille de courbes lisses et fermées, x(p, t)
: [0, 1] x [0, r] - R2, situées dans un plan complexe
où p désigne les points le long de chaque courbe et t la famille
de courbe. La courbe initiale x(p, 0) évolue en fonction du temps
à x(p, r). Nous allons considérer dans un premier temps seulement
la première courbe noté x(p) = (x1(p), x2(p)).. Le vecteur
tangent à la courbe est donné pardx
dp = _x, son vecteur unité est T(p) = x_
k _xk = ( _x1(p); _x2(p))
k _xk .
et le vecteur unité de la normal qui est perpendiculaire
à la tangente (N(p) T(p) = 0) est : N(p) = (~ _x2(p)j
_x1(p))
k _xk .
Un nouveau paramètre de la courbe sera introduit pour les
prochains calculs "s" qui représente la longueur d'un arc, et ce afin de
décrire la distance autour de la courbe au lieu de p. Avec ds = k _xk
dp.
F 3 F 3
LT T L x' 1 x' 2
Soit la matrice de rotation A(s) = ] = ] où 0
décrit la différentielle par rapport
NT -x ' 2 x' 1
à "s". Pour calculer la dynamique du système,
nous allons d'abord calculer la dynamique des deux
vecteurs N et T pour obtenir l'équation de Frenet [12].
C'est à dire A'.
CHAPITRE 2. DIFFÉRENTES APPROCHES DE LA STRATÉGIE
DE RENDEZ-VOUS 31
A' = AGA~1A = C(s)A
Trouvons C(s)?
A-1 = AT = X0 --X2
001
(matrice orthogonale)
[ 0
X2X1

2
A' = 4
» »
X1 X2
--X »2 X » 1
3
5
2 3 2 3 2 3
» » 0 0 0 » 0 »C(s) = 1 = X1 X2
X1 --X2 = X1X1 + X2X2 X;X'2' -- X;i2 4 5
0 0 » 0 0
--X2 X1 X2 X1 --X1X2 -- X1X2 X1X1 +
X2X2
2 3
0
j 0 X1
posons : k(s) = X1X2 -- X1X2 = det 5=
det(X, ,X, ). Où k(s) est la courbure de la
courbe
X2 X2
X(s) et le rayon de courbure est : 1
1i(s)1-
Nous avons aussi :
(AAT)/ = A/AT + A(AT)/ = A/A-1 + (A-1)T(A/)T = A/A-1 +
(A/A-1)T
Avec : --(AAT )/ = 0, puisque : AAT = I.
--A/A-1 = C(s)
et donc : C(s) = --C(s).
[ 0 "
--X1X1 -- X2X2 --X1X2 + X1X2
» 0 0 » 0 » 0 »
X1X2
+
X1X2--X1X1
--
X2X2
--C(s) =

|
C(s) = --C(s) )
0 » 0 »
X1X1 + X2X2 = 0 D'où :
|
8
<
:
|
0 » 0 » 0 » 0 »
X1X1 + X2X2 = --X1X1 -- X2X2
0 » » 0 0 » » 0
X1X2 -- X1X2 = --X1X2 + X1X2
|
}
|
0 » 0 j ), i i ,
X1X1 + X2X2 = --(X1X1 + X2X2) )
|
C(s) =
[ 0 k(s)1
--k(s) 0 (2.19)
Retrouvons la dynamique du système :
dT
A(s) =[1 A/ (s) = [dd ds Ns1
A-1(s) = hT-1 N-1i
NT
d'après 2.19 :
|
2 AGA-1 = 4
dT
|
dT
ds
dN
ds
|
3hT-1 N-1i --k(s =[ 0 k(s)1
) 0
|
|
)
|
8
<
:
|
dTds N-1 = k(s)
dNds T-1 =
--k(s)
|
}
|
|
{
|
dTdsN-1N =
k(s)N
ddNs
T-1T = --k(s)T
|
}
|
)
|
8
<
:
|
dTds =
k(s)N
ddNs = --k(s)T
|
}
|
)L'équa-
|
|
|
|
|
2
)4
|
ds T-1 ds T-1
N-1
T
dN T-1 dN N-1 ds ' ds
|
1= [ 0 k(s)1
--k(s) 0
|
FIG. 2-5 - La dynamique du rapetissement de courbe
Dans la dynamique du rapetissement de courbe Euclidien, la courbe
x(p, t) est déformée le long de son vecteur normal N(p, t) avec
un taux proportionnel à sa courbure k(p, t). Et donc:
Dx
3p (p,t) = k(p,t)N(p,t) (2.20)
La formule 2.20 décrit la dynamique du rapetissement de
courbe Euclidien x(p, t) tel qu'il est montré dans la figure 2-5.
Rapetissement de polygone
Nous allons appliquer les résultats de Smith et autres
concernant le rapetissement de courbe aux systèmes multi-agents.
Considérons un groupe d'agents mobiles autonomes situés dans un
plan et formant les sommets d'un polygone à "n" cotés (voir la
figure 2-6). En créant un schéma de rapetissement de polygone
semblable à celui du rapetissement de courbe, les sommets (les agents)
convergeront à un point elliptique. Ainsi, la forme du polygone se
rétrécissant à un point aura les mêmes
propriétés que la théorie du rapetissement de courbe.
Avant, nous donnerons une définition formelle d'un n - gons ainsi que
quelques propriétés intéressantes.
Définition 2.7 Un n - gons est un circuit de "n"
segments de ligne : z1z2, z2z3,. . . , znz1,joignant chaque paire de
points consécutifs : z1, z2, . . . zn. Les segments sont
appelés cotés, et les points sommets.
Définition 2.8 Un polygone simple est un n - gons avec
les cotés non intersectés. Notons I3i les angles internes (dans
le sens contraire des aiguilles d'une montre) entre les côtés
consécutifs zizi+1 et zi_1zi d'un polygone. i = 1,.. . ,
n(modulo n). Ces angles satisfont :
FIG. 2-6 - Rapetissement de polygone
Définition 2.9 Un n - gons convexe est n - gons simple
dont les angles internes satisfont : 0 ~ /3i ~ 7r,Vi=1,...,n.
Polygone convexe Polygone concave
Une ligne tracée entre n'importe quels deux points
distincts du n-gons convexe appartient toujours à celui-ci.
2.3.2 Rapetissement par la courbure de Menger-Melnikov
Considérons le cas où nous connaissons seulement
quelques points discrets x(pj), i = 1,... , n d'une courbe lisse x(p) (voir la
figure 2-6). En connectant ces points, nous obtenons un n - gons. Quand n - oc
le n - gons n'est rien d'autre que la courbe même.
Il existe un unique cercle circonscrit qui passe par n'importe
quels trois points, non colinéaires, x(pj_1), x(pj),
x(pj+1) où pj_1 < pi <pj+1 sur la
courbe x(p) comme sur la figure 2-7.
R(pi) est le rayon de ce cercle, et Ci(pi) le centre circonscrit.
La quantité 1
R(pi) est appelé la
courbure de Menger-Melnikov et a la propriété
suivante :
|
lim
pi-1 ,pi+1!pi
|
1
R(pi)
|
= Ik(pi)I
|
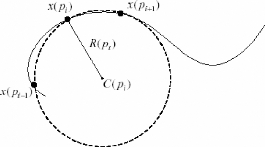
FIG. 2-7 - Le cercle circonscrit de 3 points de la courbe
Quand les deux points x(pi_1) et
x(pi_1) sont proches de x(pi) :
|
C(pi) -- x(pi) R(pi) --*
|
8
<>>>
>>>:
|
N(pi) si k(pi) > 0
ou
--N(pi) si k(pi) <0
|
9
>>>=
;>> >
|
|
et donc : lim
pi1 ,pi+1!pi
|
C(pi)_x(pi)
R(pi)2 = k(pi)N(pi).
|
Utilisant cette méthode, un schéma discret
analogue au rapetissement de courbe euclidien peut être mis en oeuvre.
Considérons "n" agents z1, z2,.. . z, situés dans un plan
complexe, et formant un n -- gons. pour chaque 3 sommets consécutifs :
zi_1, zi,zi+1, la fonction suivante est définie:
(zi_1--zi-- zi+1 -- zi ~
1
ci = c(zi_1, zi, zi+1) = (2.21)
zi_1 -- zi zi+1 -- zi zi_1 -- zi+1
où zi est le conjugué complexe. zi = xi + jyi = xi
-- jyi.
Dans [1], il a été démontré que lcil
est la courbure de Menger-Melnikov pour les 3 points zi_ 1, zi,
zi+1. Le centre circonscrit est donné par: zi+Ci
jCij2 . Le vecteur normal pour zi est approximé
à
jCij. Et donc, la dynamique de la courbure de Menger-Melnikov
décrit précédemment peut être écrit
Ci
comme suit :
_zi = c(zi_1,zi,zi+1)
Le nombre de liens de communication nécessaires pour
réaliser ce schéma est de 2n, puisque chaque agent zi doit
percevoir les deux agents zi_1 et zi+1:
L'évolution du polygone décrite par ce
système a été étudié dans [11]. Mais vu la
complexité de ce système et du calcul de ci, les résultats
sont limitées. Il a été montré que :
- Un n - gons simple s'écroule en un point dans un temps
fini, et pour n = 4, la plupart des quadrilatérales tendent à des
polygones réguliers en se rétrécissant.
- Quand n est petit, pour un n - gons convexe, il peut exister un
_zi qui ne se dirige pas vers l'intérieur.
- Quand le polygone s'écroule, la vitesse des sommets
_zi devient infiniment grande, car le dénominateur dans ci devient
très petit quand les points se rapprochent. Ceci n'est pas compatible
avec les SMA, où la vitesse doit rester raisonnable.
Vu que les résultats obtenus avec cette méthode
n'étaient pas très satisfaisants (ce qui va être
confirmé avec les résultats de notre simulation au dernier
chapitre), Smith a introduit un nouveau schéma linéaire pour le
rapetissement de polygone.
2.3.3 Le schéma linéaire
L'idée est simple, nous considérons la
même configuration d'agents précédente, la stratégie
consiste à ce que chaque agent "j" chasse le centre de ses deux agents
voisins (j - 1) et (j + 1). La vitesse de l'agent j est la distance qui
sépare ce dernier du centre de ses 2 voisins :
|
_zi=
|
1 1
2(zi+1 - zi) + 2(zi_1 - zi) (2.22)
|
Avec: _zi = 1 2(zi_1 + zi+1) - zi.
Le nombre de liens de communication nécessaire pour ce
schéma est aussi égale à 2n, pour les même raison
que le cas précédent.
2.3.4 Remarques
- Smith [1] a montré qu'un groupe d'agents,
disposés et formant une étoile autour de leur centre de
gravité, restent dans cette forme pour le reste du temps jusqu'à
arriver au centre.
- Il a aussi démontré qu'un n -gons convexe
évoluant selon la formule 2.22 reste toujours convexe.
2.4 Conclusion
Dans ce chapitre nous avons étudié
théoriquement les différentes approches utilisées pour
effectuer une stratégie de rendez-vous de SMA, leurs
caractéristiques ainsi que les limitations rencontrées lors de la
conception. Un schéma hiérarchique a été introduit
pour la poursuite cyclique. Nous avons aussi étudié la
théorie mathématique du rapetissement de courbe appliquée
aux SMA, des résultats
ont été explicitement déduits. Ils seront
vérifiés dans le chapitre suivant où nous mettrons en
oeuvre une simulation de ces différentes approches et méthodes
relatives.
Chapitre 3
Mise en oeuvre de la simulation
3.1 Introduction
La simulation consiste à effectuer des
expériences sur un modèle d'un système réel, dans
notre cas, il s'agit d'une stratégie de collectivité de robots
autonomes dans un environnement spécifique. Pour ce faire, nous
décomposons cette activité en quatre étapes :
Analyse du système réel, et des informations que
l'on désire obtenir sur son comportement.
- Représentation d'un modèle, dans lequel nous ne
retenons que les caractéristiques qui semblent pertinentes par rapport
aux résultats recherchés, sous forme d'un programme de
simulation. L'expérimentation, dans laquelle nous faisons évoluer
le modèle, c'est à dire interpréter le
programme de simulation à l'aide d'un schéma
d'exécution adapté qui est le simulateur.
- Analyse des résultats produits, et en déduire des
informations sur le comportement du système réel.
La première étape a été
traitée dans le chapitre précédent. Dans celui-ci, il
s'agit de prendre en charge les deux étapes qui suivent en
développant une interface graphique sous forme d'une applet Java, pour
simuler les différentes approches de la stratégie de rendez-vous
et en déceler quelques caractéristiques. Dans le dernier
chapitre, nous réaliserons la dernière étape.
Avant de procéder à la conception de l'interface
de simulation, et compte tenu de la complexité des méthodes
présentées au chapitre précédent, nous avons
jugé nécessaire de passer par une étape
intermédiaire, qui consiste à vérifier et à
étudier la faisabilité des algorithmes. Ceci a été
fait en utilisant Matlab, qui est un langage de calcul mathématique, car
notre système implémente des algorithmes employant plusieurs
d'outils mathématiques.
3.2 Vérification et implémentation des
algorithmes sous Matlab
Avant de réaliser notre simulation sous Java, nous
avons pensé à mettre en oeuvre des algorithmes
implémentant les différentes stratégies et méthodes
présentées au chapitre précédent. Cette
implémentation permettra de vérifier la
réalisabilité des algorithmes, de tracer les trajectoires des
robots mobiles réalisant la stratégie de Rendez-vous, et de
comparer entre les différentes approches. Cette étape fut
très simple et très rapide, car Matlab offre une boite à
outils mathématiques très riche contenant toutes les fonctions
nécessaires à notre étude.
3.2.1 Résolution de la dynamique du
système
Dans les deux approches adoptées pour réaliser
la stratégie de Rendez-vous (Poursuite cyclique, Rapetissement de
polygone), il s'agit de résoudre des systèmes dynamiques
décrivant l'évolution d'agents mobiles autonomes dans un
environnement spécifique. Ces systèmes sont régis par des
équations différentielles d'ordre 1 qui sont sous la forme
suivante :
x_ = f(t,x)
Pour résoudre ce type d'équation, nous utilisons la
méthode de Runge Kutta d'ordre 4 [10] afin de calculer les positions des
agents aux instants "t".
Définition 3.1 Les méthodes de Runge-Kutta sont
des méthodes d'analyse numérique d'approximation de solutions
d'équations différentielles. Elles portent le nom des
mathématiciens Carl Runge et Martin Wilhelm Kutta. Ces méthodes
reposent sur le principe de l'itération, c'est-à-dire qu'une
première estimation de la solution est utilisée pour calculer une
seconde estimation, plus précise, et ainsi de suite.
Algorithme 3.1 Algorithme de Runge Kutta d'ordre 4
Considérons le problème suivant :
x_ = f(t,x) x(t0) = x0 connu
La méthode de RK4 est donnée par
l'équation:
|
xi+1 = xi +
|
h 6 (w1 +2w2 +2w3+w4)
|
w1 = f(t ,x )
w2 = f(t +h 2 ;x +h 2 k1)
w3 = f(t +h 2 ;x +h 2 k2)
w4 = f(t +h,x +hk3)
L'idée est que la valeur suivante x +1 est
approchée par la somme de la valeur actuelle x et du produit de la
taille de l'intervalle h par la pente estimée. La pente est obtenue par
une moyenne pondérée de pentes :
w1 est la pente au début de l'intervalle.
w2 est la pente au milieu de l'intervalle, en utilisant la pente
w1 pour calculer la valeur de x au point t + h 2 par le biais de la
méthode d'Euler.
w3 est de nouveau la pente au milieu de l'intervalle, mais
obtenue cette fois en utilisant la pente w2 pour calculer x.
w4 est la pente à la fin de l'intervalle, avec la valeur
de x calculée en utilisant w3.
Dans la moyenne des quatre pentes, un poids plus grand est
donné aux pentes au point milieu.
|
pente =
|
w1 + 2w2 + 2w3 + w4
|
|
6
|
L'ordre 4 signifie que l'erreur commise à chaque
étape est de l'ordre de h5, alors que l'erreur totale
accumulée est de l'ordre de h4.
3.2.2 Implémentation des algorithmes et tracé
des trajectoires sous Matlab
Nous avons implémenté avec Matlab [13] les
fonctions des différentes méthodes correspondant aux deux
approches dont la poursuite cyclique et le rapetissement de courbe. Dans
chacune d'elles, nous avons tracé des graphes affichant les
trajectoires, effectuées par un groupe d'agents, pour vérifier
leur convergence au point centre de gravité.
Poursuite cyclique
Pour effectuer cette stratégie, les agents évoluent
selon le système ci-dessous avec la matrice A qui change suivant la
méthode.
z_ =Az (3.1)
Remarque 3.1 Il existe une deuxième méthode pour la
résolution du système 3.1, qui consiste à trouver
itérativement les positions z telles que :
z = expm(At ).z0
Où expm(A) est la matrice exponentielle de A, et est
calculée en utilisant la formule suivante :
expm(A) = V diag(exp(diag(D))) V ~1
Avec D : un vecteur constitué de l'ensemble des valeurs
propres, et V: la matrice des vecteurs propres correspondant.
Ceci revient à calculer les valeurs et les vecteurs
propres d'une matrice de dimension n, et donc de résoudre une
équation et un système d'équation de l'ordre n. Ce dernier
pouvant être très grand, il devient très difficile de
résoudre le système. En utilisant matlab, ceci fut simple
à implémenter car la fonction expm est prédéfinie.
Mais pour programmer la classe Java qui le résout, l'exécution de
la fonction aura une très forte complexité dans l'utilisation des
ressources (temps et espace mémoire). C'est pour cela que nous avons
employé une méthode plus simple qui est celle de Runge Kutta
d'ordre 4.
Poursuite cyclique traditionnelle Dans cette méthode, la
matrice A de la formule 3.1 est une matrice circulante de la forme : A1 =
circ(-1 , 1,0,.. . , 0), et l'algorithme est le suivant :
Algorithme 3.2
Début
% n est le nombre d'agents
% z est un tableau contenant les positions des agents % zn est le
centre des agents
A1 = zero (n); % une matrice nulle de dimension n
Pour i = 0 à n - 1 % Construire la matrice circulante
j
= (i+1) mod n;
A1(i,i) = -1;
A1(i,j) = 1;
fin pour
zn = mean(z) % la moyenne du tableau z
h = 0.1;
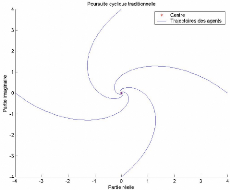
FIG. 3-1 - 4 agents dans une poursuite cyclique
traditionnelle
Tant que (z =6 zn) % les agents ne sont pas au centre
wi = Al * z;
w2=A1 *(z+ (h/6) *wl); w3=Ai *(z+ (h/6) *w2); w4=Al
*(z+h*w3);
z = z +((h/6) * (w1+2*w2+2*w3+w4));
fin tant que
fin.
Implémentant plus formellement cet algorithme sous matlab,
et traçant un plot des positions "z", nous obtenons la courbe dans la
figure 3-1 pour n = 4:
Poursuite cyclique hiérarchique Dans ce schéma, la
matrice AL (L étant le nombre de couches) est circulante à blocs
et est obtenue d'une manière récursive à partir de la
formule 2.15.
L'algorithme de la poursuite cyclique hiérarchique est le
même que celui de la traditionnelle avec une différence dans le
calcul de la matrice A.
Algorithme 3.3 Début ...
% L est le nombre de couches.
% ni est le nombre d'agents de la première couche.
nm = L pn;
Am = circulante(L,n,n1,nm); zn = mean(z);
...
fin.
Et voici un pseudo code de la fonction circulante(L,n,n1,nm) :
Code 3.1 Fonction circulante(m,n,n1,nm)
début
si (m = 1) % la matrice A1
A = zero(n1); %la matrice nulle
pour i=0 à n1-1
j = (i+1) mod n;
A1(i,i) = -1;
A1(i,j) = 1;
fin pour
sinon
size = nmm~1 ;
Id = eye(size); % La matrice identité de dimension size
mat=circulante(m-1,n,n1,nm) - Id % La récursivité pour calculer
Am-1
size = nmm;
A =zeros(size2, size2);
pour cpt=0 à ((size2/size)-1)
pour i=0 à size-1
pour j=0 à size-1
k = i+size*cpt;
l =j+size*cpt;
r = (l + size) mod size2 ;
A(k,l)=mat(i,j); % Am-1 - I
A(k,r)=Id(i,j); % I
fin pour
fin pour
fin pour
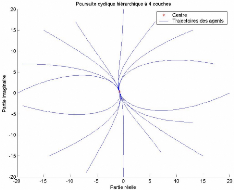
FIG. 3-2 - 16 agents dans une poursuite cyclique
hiérarchique à 4 couches
fin.
Sous Matlab, nous avons obtenu la courbe dans la figure 3-2
traçant les trajectoires des agents dans une poursuite
hiérarchique à L = 4 couches, et n = 16 agents.
Poursuite cyclique à L liens Ce schéma est aussi
résolu avec l'équation 3.1, et la matrice correspondante AL est
calculée à partir de la formule 2.17. L'algorithme qui
implémentera cette méthode sera le même que la
méthode précédente, et un pseudo code sous matlab
décrivant la fonction de calcul de la matrice AL est la suivant :
Code 3.2
Début
A=zeros(n,n); % Initialisation de la matrice
pour k=0 à n-1
r = (k+1) mod n;
A (k, k) =-L ;
pour cpt=0 à L-1
r = (r+cpt) mod n;
A(k,r2)=1;
fin pour
fin pour
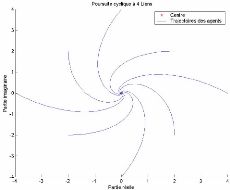
FIG. 3-3 - 8 agents dans une poursuite cyclique à 4
liens
A=(1/L) *A Fin.
Le graphe traçant les trajectoires d'un groupe de 8 agents
effectuant une poursuite cyclique à 4 liens est dans la figure 3-3.
Rapetissement de polygone
Dans cette approche, à chaque instant "t", la position
d'un agent est calculée à partir des positions
précédentes de ses deux agents voisins. L'algorithme suivant
trace les trajectoires des agents utilisant la technique de la courbure de
Menger-Melnikov ou celle du schéma linéaire. Il est le même
pour les deux méthodes, la différence réside dans le
calcul de la fonction C de la formule 3.2. La résolution se fait
toujours en utilisant la méthode de Runge Kutta.
z_ = C(zi_1,zi,zi+1) (3.2)
Algorithme 3.4
De but
% n est le nombre d'agents
% z est un tableau contenant les positions des agents à
l'instant t % zprec est le tableau qui contient les positions à
l'instant t-1
% zn est le centre des agents
zn = mean(z) % la moyenne du tableau z
h = 0.1;
Tant que (toutes les positions =6 centre)
pour chaque agent
zprec(i) = z(i);
w1 = Ci( zprec(j), zprec(i), zprec(k));
w = Ci( zprec(j)+(h/ )*w1, zprec(i)+(h/ )*w1, zprec(k)+(h/
)*w1);
w3 = Ci(zprec(j) + (h/ ) *w , zprec(i) + (h/ ) *w ,zprec(k) +(h/
) *w );
w4 = Ci(zprec(j)+h*w3, zprec(i)+h *w3,zprec(k)+h*w3);
z(i) = zprec(i) + ((h/6) * (w1 + *w + *w3+w4));
finPour
fin tant que
fin.
Rapetissement par Menger-melnikov Pour cette méthode,
comme nous avons vu au chapitre précédent la fonction C est
calculée comme suit :
(zi_1 - zi - zi+1 - zi ) 1
ci(zi_1, zi, zi+1) = zi_1 - zi zi+1 - zi zi_1 -
zi+1
Nous traçons alors le graphe qui décrit le
rapetissement du polygone formé par les agents, ainsi que les
trajectoires accomplies par les agents lors de leur convergence au centre. Voir
la figure 3-4
Schéma linéaire Dans ce cas, la fonction C est
définie comme suit, et les trajectoires, tracées par 16 agents
mobiles effectuant un rapetissement de polygone, sont dessinées dans la
figure 3-5:
1 1
ci(zi_1,zi,zi+1) = 2(zi+1 -zi)+
2(zi_1 -zi)
Remarque 3.2 Les graphes seront commentés au chapitre
suivant, où nous donnerons tous les résultats déduits sous
Matlab, en parallèle avec ceux obtenus par la simulation.
3.3 Mise en oeuvre de la simulation
Dans cette perspective, nous réalisons notre simulation
sous forme d'une applet java, une interface graphique qui permet de
contrôler les entrées nécessaires au lancement de la
simulation, de visualiser le comportement des agents dans un écran de
simulation, ainsi que d'afficher les résultats déduits.
MengerMelnikov

50
Centre
Rapétissement de polygone Trajectoires
30
20
10
40
0
10
20
30
40
50
50 40 30 20 10 0 10 20 30 40 50
Partie réelle
FIG. 3-4 - Rapetissement par Menger-Melnikov d'un polygone
formé par 16 agents
Schéma linéaire
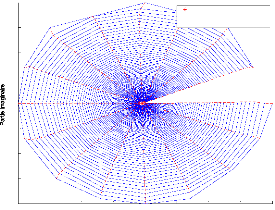
20
Centre
Rapétissement de polygone Trajectoires
10
5
15
0
-5
-10
-15
-20
-20 -15 -10 -5 0 5 10 15 20
Partie réelle
Nos robots autonomes et homogènes sont
modélisés via des agents réactifs. L'espace dans lequel
ces agents errent est sous forme d'un plan à deux dimensions
considéré sans obstacles.
3.3.1 Cahier de charge du simulateur
la simulation va nous permettre de tester la validité
des solutions proposées dans le chapitre 3, de suivre et de
vérifier le comportement des agents dynamiquement et de mesurer certains
facteurs d'évaluation qui permettent de comparer entre les
différentes méthodes étudiées au chapitre
précédent.
L'utilisateur doit avoir la possibilité de :
- Choisir la stratégie ainsi que la méthode qu'il
désire tester,
- Introduire le nombre d'agents qui constitue le système,
ainsi que les différentes entrées nécessaires à
chaque méthode,
- Spécifier une précision qui représente
à quelle distance les agents doivent se réunir. Si cette
précision est nulle, les agents effectuent un rendez-vous au centre,
- Lancer la simulation, avec la possibilité
d'arrêter et de reprendre l'exécution ainsi que de l'annuler,
- Visualiser les résultats de chaque simulation
après son achèvement, stocker ces résultats qui
représentent le temps de convergence et la vitesse moyenne des agents,
ainsi que le nombre de senseurs nécessaires à la
méthode,
La possibilité d'afficher un rapport final regroupant les
résultats obtenus utilisant les différentes méthodes, et
de calculer les rapports de taux vus au chapitre précédent.
3.3.2 Conception du simulateur
Avant de réaliser la simulation, et
indépendamment du langage utilisé, nous allons d'abord passer par
une étape de conception de notre système multi-agents en
réalisant des modèles UML [14], pour décrire l'aspect
statique et dynamique de l'application.
Définition 3.2 La conception consiste à apporter
des solutions techniques aux descriptions définies lors de l'analyse, on
y définit les structures et les algorithmes sans tenir compte du langage
de programmation utilisé. Aujourd'hui, le standard industriel de
modélisation objet est UML (Unified Modeling Language). UML unifie
à la fois les notions et les concepts orientés objet, et aussi
les notations nécessaires aux différentes activités d'un
processus de développement et offre, par ce biais, le moyen
d'établir le suivi des décisions prises depuis l'expression des
besoins jusqu'au codage.
Dans ce qui suit, nous donnerons les diagrammes de conception de
la simulation.
Remarque 3.3 Dans notre projet, il s'agit de modéliser
un système multi-agents, or UML utilise une approche orientée
objets. Nous définissons un agent comme étant un objet
intelligent capable de prendre des décisions sans intervention externe,
ainsi les vocabulaires d'agent, de composant ou d'objet peuvent être
employés dans les divers contextes et domaines du coté de
l'utilisateur. Alors que du coté du développeur, il y a un lien
évident entre ces entités et il est même souhaitable
d'uniformiser les descriptions pour ne pas avoir à employer des
méthodes ou des formalismes différents.
Il n'existe pas moins de 12 diagrammes UML, partagés en
deux vues, une statique et l'autre dynamique. Nous utiliserons seulement deux,
chacun décrivant une vue pour modéliser notre système. Ces
diagrammes ont été conçus avec l'outil UMLEclipse de
l'éditeur Java Eclipse.
Modélisation structurelle
Pour donner une vue statique du système
c'est-à-dire représentant le système physiquement, nous
donnons le diagramme de classes (voir la figure 3-6), qui est le point central
dans le développement orienté objet, il représente la
structure du code orienté objet, et par la suite les modules qui
constituent l'application. Une classe est décrite par son nom, ses
attributs (propriétés) et ses méthodes (fonctions).
Mentionnons que notre interface hérite de la classe Applet et
implémente la classe Runnable (Thread). Ceci pour permettre à
l'utilisateur d'interrompre son exécution à n'importe quel
instant, modifier la vitesse de simulation, et ceci se traduit par un
pseudo-parallélisme dans l'exécution.
Légende du diagramme de classes
Définition 3.3 En Java:
Fonction (variable) publique : c'est une fonction (variable) qui
peut être appelée à partir d'autres classes du même
package.
Fonction (variable) privée : ne peut être que par la
classe mère, et les classes parentes.
Fonction synchronisée : désigne une fonction
partagée par plusieurs threads, rendre une fonction de type
"synchronized" fait qu'elle ne puisse être appelée que par un seul
thread à la fois.
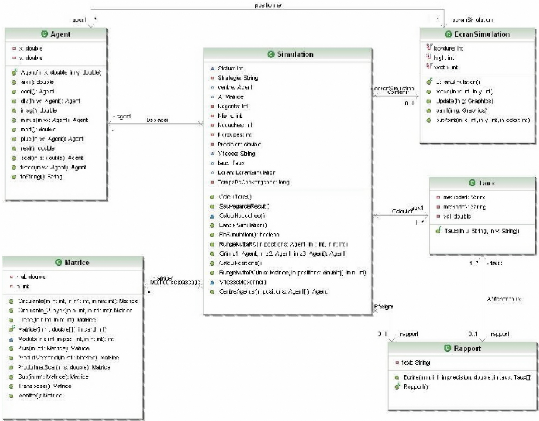
FIG. 3-6 - Diagramme de classes
|
1
V= n
|
Xn
i=1
|
( di
temps) (3.3)
|
Description des classes
La classe Simulation Représente l'interface principale
de notre simulation, elle héritera dans la phase de réalisation
de la classe Java Applet de la bibliothèque Swing. Cette classe regroupe
les différents attributs et méthodes nécessaires à
la réalisation des simulations, dont :
Les attributs :
- Le nombre d'agents dans le système,
- Le nombre de couches dans le cas d'une poursuite cyclique
hiérarchique,
- Le nombre de liens dans le cas d'une poursuite cyclique
à liens,
- Le nombre de groupes dans le cas d'une poursuite cyclique
hiérarchique à deux couches, - Les positions des agents tout au
long de la simulation,
- La précision telle que nous l'avons définie
précédemment.
Les méthodes :
- Ci(zi_1, zi, zi+1) : la fonction
utilisée dans le rapetissement de courbe, décrivant
l'évolution des agents du système.
- RungeKuttaPC() : pour la résolution de l'équation
qui décrit le système dans le cas d'une poursuite cyclique.
- RungeKuttaRC() : La résolution de Runge kutta dans le
cas du rapetissement de courbe.
- FinSimulation() : Une fonction booléenne qui scrute la
fin de la simulation, autrement dit la réunion au centre.
- CalculNcouches() : Une fonction permettant le calcul des
nombres de couches (L) admissibles en fonction du nombre d'agents saisi. La
simulation permet d'effectuer les poursuites cycliques hiérarchiques
:
- à 2 couches, avec possibilité de contrôler
le nombre d'agents dans chaque groupe.
- Le cas optimal du schéma général, tel que
nous l'avons vu auparavant, c'est à dire lorsque
pNL
2 N. Dans cette fonction, il s'agit de retrouver tous les L
valides tels que cette condition L
soit vérifiée.
- CalculPositions() : Calcule les positions des agents dans le
temps jusqu'à l'arrivée au centre et qui fait appel aux fonctions
RungeKutta().
- CentreAgents() : Retourne les coordonnées du centre des
agents.
- VitesseMoyenne() : Retourne la vitesse moyenne des agents, un
facteur d'évaluation entre les différentes méthodes.
di : la distance parcouru par l'agent i.
temps : Le temps de convergence. C'est à dire, le temps
nécessaire à l'accomplissement du rendez- vous.
- SauvegarderResult() : Une fonction qui permet de stocker les
résultats obtenus (temps de convergence, vitesse moyenne, nombre de
senseurs) des différentes méthodes, pour un nombre d'agents
donné, afin de pouvoir les comparer. Les résultats ne sont
sauvegardés que si cette simulation n'a jamais été
lancée.
- CalculTaux() : Calcule l'augmentation dans les taux de
convergence entre les différentes méthodes de la poursuite
cyclique, ceux que nous avions approximé au chapitre 2. Le taux est
calculé dans les cas que nous avons déjà vus.
La classe EcranSimulation Regroupe les propriétés
de l'écran d'affichage des simulations, ainsi que des fonctions
graphiques permettant son affichage, sa mise à jour ...
Les attributs :
- hight et width : décrivent les dimensions de
l'écran.
- bordure : l'épaisseur de la bordure.
Les méthodes :
- paint() : la méthodes qui permet d'initialiser et
d'afficher l'écran de simulation.
- Update() : met à jour l'écran, en affichant les
nouvelles positions des agents ainsi que le centre. Elle est appelée par
la classe Simulation.
- putPoint() : dessine un point (représentant un agent) su
l'écran.
- Move() : la fonction qui gère le curseur, pour
récupérer sa position d'où celle de l'agent à
placer.
La classe Agent Comme chaque agent est
représenté par sa position sous forme d'un nombre complexe, cette
classe regroupera les propriétés et les fonctions qui
gèrent les nombres complexes, telles que :
Les attributs :
x, y : la partie réelle et imaginaire du nombre complexe,
représente aussi les coordonnées d'un agent selon l'axe des
abscisses et des ordonnées.
Les méthodes :
- real() et imag() : retournent la partie réelle et
imaginaire d'un nombre complexe. - mod() : retourne le module d'un nombre
complexe, représente la vitesse d'un agent. - conj (): retourne le
conjugué complexe d'un nombre complexe.
- plus(), minus(), times(), div (), scal() : les
opérations effectuées sur les nombres complexes telles que :
l'addition, la soustraction, le produit, la division ainsi que la
multiplication par un réel.
La classe Matrice Une classe regroupant un ensemble de
fonctions pouvant être effectuées sur des matrices carrées
telles que : l'addition, la soustraction, le produit vectoriel, ... mais aussi
des fonctions complexes telles que la construction d'une matrice circulante de
dimension donnée.
Les attributs : Sont la matrice elle même (mat) et
sa dimension (n).
Les méthodes :
- Identite() : Retourne la matrice identité de dimension
n.
- Sub(), Plus (), ProduitVectorielCarre() : retournent les
résultats de l'addition, la différence, et le produit vectoriel
de 2 matrices carrées.
- ProduitMatScal() : retourne une matrice qui résulte
produit d'un nombre réel par la matrice mat.
- SommeV() : somme de deux vecteurs.
- Modulo(i, pas, n) : retourne le résultats de (i + pas)
mod n.
- Circulante(m, n1, nm) : une fonction
récursive qui calcule la matrice circulante décrite dans la
formule 2.15. avec m est le nombre de couches, n1 le nombre d'agents de la
première couche, et nm le cardinal de chaque couche.
Circulante(n, n1) : un cas particulier de la matrice circulante
qui est celle de la poursuite cyclique hiérarchique à deux
couches, deux attributs sont nécessaires dont le nombre d'agents total
et le nombre d'agents de chaque groupe, calculé à partir du
nombre de groupes.$ Lliens(L, n) : retourne la matrice circulante de la
poursuite cyclique à L liens, telle qu'elle est décrite dans la
formule 2.17.
La classe Taux Cette classe représente les rapports de
taux entre les différentes méthodes de la poursuite cyclique.
Les attributs : meth1 et meth2 pour décrire les
deux méthodes comparées, et val la valeur du rapport
approximé précédemment.
Les méthodes : Taux(meth1, meth2) : le constructeur
de la classe.
La classe Rapport Cette classe représente une
fenêtre (Frame) indépendante qui affiche le rapport regroupant les
différents résultats obtenus lors des simulations lancées
pour un groupe d'agents donné.
Les attributs : seulement un champs de texte qui affiche
le rapport.
Les méthodes :
- Initialize() : réinitialisation du champs de texte, par
exemple après changement du groupe d'agents.
- Ecrire() : Ecrit un rapport dans le champs de texte qui
contient : le temps de convergence, le vitesse moyenne et le nombre de senseurs
de toutes les simulations, ainsi que les rapports calculés entre les
différentes méthodes de la poursuite cyclique.
Modélisation comportementale
Nous avons choisi le diagramme de séquences (voir
figure 3-7), pour modéliser la vue dynamique de la simulation, montrer
son fonctionnement et l'interaction entre l'utilisateur et l'interface de
simulation.
3.3.3 Réalisation de l'interface graphique
Nous avons réalisé notre simulation sous forme
d'Applet héritant de la classe JApplet de la bibliothèque Swing.
L'interface graphique a été implémentée avec le
plugin Visual Editor de l'EDI (Environnement de développement
intégré) Java [15, 16, 17] Eclipse 3.2.
Définition 3.4 Les Swing sont des composants (boutons,
fenêtres, label, menus ...) utilisés pour faire des interfaces
graphiques. Ces composants sont regroupés dans le package Swing. Eclipse
3.2 comporte par défaut ce package.
Remarque 3.4 Les nombres manipulés dans la simulation sont
tous des réels de format double, le type de codage est : IEEE 754.
L'interface de simulation est présentée dans la
figure 3-8.
1 : Un bouton permettant l'affichage du rapport des
résultats de la simulation.
2 : Onglets des entrées de la simulation, des deux
stratégies et selon la méthode sélectionnée. Les
champs doivent contenir des nombres positifs.
3 : L'écran de simulation, les robots mobiles sont
représentés par des points de masses.
4 : Permet de contrôler la vitesse de simulation.
5 : Les résultats de la simulation, contient un
chronomètre qui calcule le temps de convergence, et affiche à la
fin de simulation la vitesse moyenne des agents donnée par
l'équation 3.3. Ainsi que le nombre de liens de communication (senseurs)
dans le système nécessaires à l'accomplissement de la
stratégie.
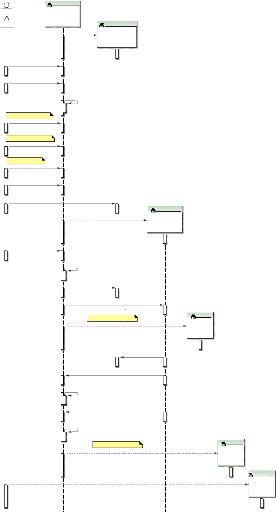
Utilsateur
setPrecision()
Donner uneprécision deconvergence
Si méthode = PC hiérarchique
Si le nombredecouches est2
Si méthode = PC à liens
Choisir la s tratégieetla méthode
setNgroupes()
Sais ir le nombredegroupes
Choisir Nombre decouches
Sasir le nombre d'agents
Sais ir lenombre de liens
Lanc er la s imulation
LancerSimulation()
setN couches ()
Selectionner()
setNagents()
setNliens()
Positionner les agents
Interface:Interface
putPoint()
Ec ranSimulation()
Initialier Ec ran
Calculer les nombres de couches possibles
CalculNcouches()
Calc ulerla positionducentre
CalculCentre()
Afficher le temps de simulation Calc ulTemps ()
Sauv egarder les résultats Sauv egarderResult
Afficher le centre
putPoint()
La position des agents atteintle centre
Si méthode = Pours uite cy clique
Affichervitessede c onvergence
Calc uler lesnouvelles positions
Créer les agents
Si méthode = pours uite cy clique
Afficher le rapportdes résultats des s imulations
Vites seDeConvergence()
Agent()
Calc uler la matricede transformation
CalculPositions()
Ec ran: EcranSimulation
FinSimulation()
Circ ulante()
Afficher les nouvelles pos itions
Calc uler les rapports de taux
Ec rire()
Calc ulTaux()
Update()
PosAgent:Agent
A:Matrice
Taux :Taux
Rap port: Rappo
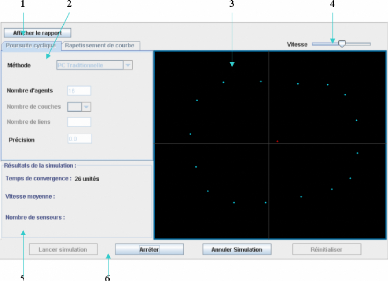
FIG. 3-8Interface principale de la simulation
6 : Boutons de contrôle, permettant de lancer la
simulation, l'arrêter puis la reprendre, l'annuler ou de tout
réinitialiser.
Remarque 3.5 Le temps de convergence:
Représente le nombre d'unités de temps
nécessaires à l'accomplissement du rendez-vous. L'unité
est le pas de la méthode de Runge Kutta, que nous avons vu au chapitre
3, et qui est égale à h = 0.1.
L'applet permet de tester les différentes
stratégies étudiées dans le chapitre 2, et de percevoir le
comportement des agents réalisant une stratégie de rendez-vous
sans l'intervention de l'utilisateur entre le lancement et l'accomplissement de
la simulation. Un rapport (voir la figure 3-9), sous forme d'une Jframe avec un
bouton fermer, peut être visualisé à la fin de chaque
simulation, regroupant tous les résultats obtenus, pour un groupe
d'agents donné, et aussi les rapports de taux calculés entre les
méthodes de la poursuite cyclique et qui permettent de comparer entre
elles. Dans l'exemple de la figure, le résultat du rapport de taux entre
la poursuite cyclique hiérarchique à 4 couches et la
traditionnelle signifie que la première converge 64 fois plus rapidement
que la seconde.
FIG. 3-9 - Rapport des résultats
3.4 Conclusion
Dans ce chapitre, une implémentation des approches de
la stratégie de Rendez-vous, présentées dans le chapitre
précédent, a été réalisée. Une
première étape fut la vérification et la validation des
algorithmes de base sous matlab, la seconde fut la mise en oeuvre d'une
simulation Java implémentant toutes les méthodes, simulant la
coopération et le déplacement des robots autonomes et affichant
les résultats que nous allons discuter au chapitre qui suit, et qui va
résumer l'ensemble des conclusions, des remarques et des théories
fondées.
Le passage par Matlab fut très bénéfique
dans le sens où ceci nous a permis une facilité dans la
conception des algorithmes sans devoir programmer les outils
mathématiques nécessaires à notre étude. La
deuxième partie nous a permis de nous familiariser avec le langage de
programmation orienté objet Java et plus spécialement avec
l'environnement Eclipse, qui nous a aussi facilité l'étape de
conception avec son plugin UMLEclipse.
Chapitre 4
Résultats et discussions
Dans ce chapitre, nous présenterons un
résumé des résultats, des remarques et des conclusions
obtenues lors de notre travail pratique qui a été abordé
au chapitre 3. Nous discuterons des différents problèmes
rencontrés lors de l'implémentation de la stratégie de
rendez-vous et comparerons entre les méthodes étudiées
pour réaliser cette stratégie.
Le chapitre se compose de deux parties, la première
concerne le tracé de graphes sous Matlab en vue de comparer les
trajectoires dessinées par les agents utilisant les trois
méthodes de la poursuite cyclique, et celles du rapetissement de
polygone et l'influence des nombres (de couches ou de liens) sur les vitesses
de convergence.
Dans la seconde, nous allons commenter le comportement des
agents qui a été observé lors des tests de simulations
sous différentes approches, dans le but de déceler les avantages
et les inconvénients des unes et des autres.
4.1 Résultats obtenus sous Matlab
4.1.1 Comparaison entre les méthodes
Hormis les trajectoires des agents tracées aux chapitre
3 (voir figures 3-1, 3-2, 3-3, 3-4, 3-5) pour vérifier leur convergence
au centre, nous allons tracer dans cette partie d'autres graphes, les premiers
affichent une comparaison entre les différentes méthodes, et les
autres consistent à augmenter les nombres de (couches/liens) et à
percevoir l'impact de ceci sur la rapidité de convergence.
Comparaison entre les méthodes de la poursuite cyclique
Nous avons tracé dans le même graphe (sur la figure
4-1) les 3 courbes décrivant les trajectoires des agents utilisant les
méthodes de la poursuite cyclique, afin de pouvoir comparer entre
elles.
Les 3 méthodes de la poursuite cyclique
20
Traditionnelle Hiérarchique 4-couches Hiérarchique
4-liens
10
5
15
0
-5
-10
-15
-20
-20 -15 -10 -5 0 5 10 15 20
Partie réelle
FIG. 4-1Les 3 méthodes de la poursuite cyclique d'un
groupe de 16 agents
Nous remarquons que, les agents avec la méthode
hiérarchique à 4 couches convergent au centre en premier, suivi
de la poursuite cyclique à 4 liens, puis de la traditionnelle qui est la
plus lente, ce qui confirme les résultats obtenues théoriquement
au chapitre 2 en référence à ceux de Smith [1]. Sachant
que les deux premiers schémas utilisent le même nombre de
senseurs.
Comparaison entre les méthodes du rapetissement de
polygone
Les trajectoires des agents qui s'affichent en bleu sur la
figure 4-2 sont celles tracées en employant le schéma
linéaire, les agents convergent effectivement et rapidement au centre en
effectuant un rapetissement du polygone formé par les 16 agents. Par
contre, dans le cas du rapetissement de Menger-Melnikov, nous remarquons que
les agents se rapprochent, donnant l'illusion qu'ils convergent au centre, puis
d'un seul coup s'éloignent comme il est montré sur les figures
4-2 et 3-4 ce qui va être mieux visualisé sur la simulation. Ceci
est dû particulièrement au fait que lorsque les agents se
rapprochent, la formule 4.1 va tendre vers l'infini, puisque les
dénominateurs tendent vers 0. Ainsi, les positions des agents se
dirigent dans le sens contraire et s'éloignent de leur lieu de
rendez-vous, que nous allons voir dans la simulation qu'il ne se situe pas
toujours au centre!
(zi_1-zi- zi+1 - zi ~ 1
ci = c(zi_1; zi; zi+1) = (4.1)
zi_1 - zi zi+1 - zi zi_1 - zi+1
trajectoires des méthodes du rapetissement de polygones
Centre MengerMelnikov Schéma linéaire
40
30
20
10
0
10
20
30
40
50
50 40 30 20 10 0 10 20 30 40 50
50
Partie réelle
FIG. 4-2Trajectoires des deux méthodes du rapetissement de
polygone
Le problème de Menger-Melnikov sera étudié
plus en détail dans les résultats de la simulation.
4.1.2 Mise à l'échelle du nombre de couches dans un
schéma hiérarchique
Dans la figure 4-3, nous avons voulu tester l'influence de
l'augmentation du nombre de couches sur la vitesse de n = 16 agents et leur
convergence au centre. Il s'est avéré que lorsque le nombre de
couches augmente, la stratégie de rendez-vous s'effectue plus
rapidement. Car la PC hiérarchique à 4 couches (n1 = n2 = n3 = n4
= 2) est plus rapide que celle à 2 couches (n1 = 2, 8 groupes), ainsi
que celle à une couche.
4.1.3 Mise à l'échelle du nombre de liens
dans un schéma à L liens
De la même manière, nous montrons que lorsque le
nombre de liens dans une poursuite cyclique à L-liens augmente, la
convergence au centre des agents se fait plus rapidement. Ceci est
affiché sur la figure 4-4.
4.2 Résultats de la simulation
La poursuite cyclique hiérarchique
20
1 couche (traditionnelle)
2 couches
4 couches
10
5
15
0
-5
-10
-15
-20
-20 -15 -10 -5 0 5 10 15 20
Partie réelle
FIG. 4-3 - La poursuite cyclique hiérarchique de 16
agents en fonction du nombre de couches.
Poursuite cyclique à Liens
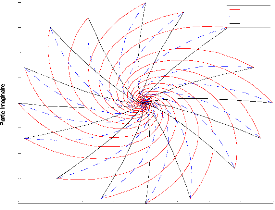
4 liens 8 liens 12 liens
10
5
0
-5
-10
-15
-20
-20 -15 -10 -5 0 5 10 15 20
20
15
Partie réelle
par la simulation (temps de convergence, vitesse moyenne des
agents, nombre de senseurs et les rapports entres les taux de convergence).
4.2.1 Poursuite cyclique
Notre simulation permet de visualiser les agents autonomes,
dotés de senseurs omnidirectionnels représenté par des
points de masses et effectuant une poursuite cyclique, pour se réunir en
vain au centre de rendez-vous. La poursuite cyclique a été
réalisée par les trois méthodes étudiées
dans les chapitres 2 et 3. Nous avons pu déceler quelques règles
via les simulations de ces trois méthodes pour quelques configurations
d'agents dont :
Les agents convergent, dans tous les cas, au centre de
consensus sans jamais se heurter. Ceci confirme la validité des
résultats obtenus par la synthèse théorique et les graphes
tracés sous matlab.
Le temps de convergence des agents augmente, et la vitesse
moyenne diminue quand le nombre d'agents est grand dans une poursuite
cyclique.
- Le temps de convergence dans un schéma
hiérarchique est toujours plus petit, suivi de celui à L liens,
et finalement par la poursuite cyclique traditionnelle. Contrairement à
la vitesse de convergence qui augmente.
- Dans une poursuite hiérarchique, le temps de
convergence est proportionnel, et la vitesse est inversement proportionnelle au
nombre de couches. Cependant, quand ce dernier est grand, le nombre de liens de
communication concrétisés par des capteurs, augmente. Mais ceci
se traduit aussi par une augmentation dans la complexité de calcul, et
de traitement.
- De même pour le schéma à L liens, la
convergence est d'autant plus rapide que le nombre de liens augmente, c'est
même la solution qui converge le mieux sous la condition 4.2 :
Nombre de liens = Nombre d'agents - 1 (4.2)
- Les rapports entre les taux de convergence, approximé
dans le chapitre 2, signifient combien de fois une méthode est plus
rapide que l'autre. Dans les résultats obtenus, La PC
hiérarchique à L couches est N1 fois plus rapide que la PC
à L liens qui est elle même N2 fois plus rapide que la PC
traditionnelle. Avec N1 > N2.
Ceci dit, nous avons pu aussi déduire quelques
inconvénients de cette stratégie notamment en ce qui concerne le
comportement des agents. Ces derniers empruntent un chemin très long
pour atteindre le centre au même moment.
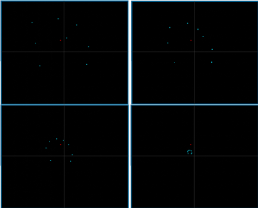
FIG. 4-5 - Le comportement observé des agents avec la
méthode de Menger-Melnikov
En ce qui concerne la PC hiérarchique, la configuration
n'est possible que dans certains cas, notamment lorsque LpNL est un
entier ou lorsque le nombre de groupes est valide quand c'est un schéma
à deux couches.
4.2.2 Rapetissement de polygone
Cette approche possède l'avantage d'exiger un nombre
fixe de capteurs et le même pour les deux méthodes et qui
équivaut à 2n. Ce qui facilite la possibilité de les
départager. Durant notre étude, certaines remarques et
déductions ont été faites :
- Dans le schéma linéaire, la dynamique du
rapetissement s'effectue normalement et les agents convergent dans une
durée raisonnable.
- Dans la méthode de la courbure de Menger-Melnikov,
nous avons observé une dynamique étrange du rapetissement de
polygone et donc de la convergence des agents. Ceux-ci se rapprochent au
début très lentement. Ensuite les vitesses s'amplifient
infiniment jusqu'à ce qu'ils se réunissent à un point qui
ne se situe pas forcément au centre de gravité. Les agents aussi
se heurtent quand ils sont trop proches, ce comportement inconvenable, vu
risqué, est exposé sur la figure 4-5 :
Solution:
En tentant de faire converger les agents au centre, nous ne
pouvons ignorer le fait que les agents se rentrent dedans, ce qui est
dangereux. La seule solution que nous avons pu apporter à notre
simulation est d'arrêter celle-ci dès que les agents sont trop
proches les uns des autres, en remplaçant le test d'arrêt qui est
l'arrivée des agents au centre par la nullité des
dénominateurs
de la formule 4.1. La vitesse de convergence n'est pas
calculée dans ce cas, puisque les agents n'atteignent pas le centre.
Et comme l'un des objectifs majeurs de la simulation est de
tester la validité des solutions proposées théoriquement,
cette stratégie a été classée instable et donc
inappropriée.
- Nous avons aussi remarqué que dans les deux
méthodes du rapetissement de polygone, les agents disposés
n'importe comment forment d'abord une sorte de polygone convexe dont les
sommets sont ces agents, puis effectuent le rapetissement au centre en forme
d'ellipse.
4.2.3 Remarques
Nous avons pu faire d'éventuelles observations et
proposé des solutions lors de notre étude, et qui sont:
- En comparant entre les deux approches, nous avons
remarqué que le schéma linéaire effectue une convergence
directe au centre, sans faire de détour, par contre les
déplacements des agents sont relativement petits comparés
à ceux de la poursuite cyclique. Donc, le schéma linéaire
converge plus rapidement que la PC traditionnelle mais moins que le
schéma hiérarchique et celui à L liens.
- L'un des inconvénients de notre implémentation
est que les agents agissent dans l'ordre d'entrée, plus
précisément dans la poursuite cyclique. La solution à
apporter serait de renuméroter ces agents selon leurs positions et
d'économiser ainsi des déplacements inutiles des agents.
- Les agents ne perçoivent pas le lieu de rendez-vous,
ce qui fait que dans certaines situations, nous avons remarqué que les
agents passent prés du centre sans s'arrêter, poursuivent leur
stratégie puis retournent au même point. Une solution serait
d'ajouter des senseurs pour dédecter l'approche du point de rendez-vous
et s'arrêter dès que celui-là est atteint, dans le cas
où l'arrivée au même moment de tous les agents n'est
indispensable.
4.3 Conclusion
Au cours de ce chapitre, nous avons réussi à
résumer les différentes remarques et observations établies
durant les nombreuses simulations que nous avons testées et les graphes
de trajectoires que nous avons tracés sous Matlab, afin de
détecter le comportement des agents et pouvoir comparer entre les
méthodes de la stratégie de rendez-vous.
Une conclusion a été déduite concernant
le rapetissement par la courbure de Menger-Melnikov qui a engendré des
résultats inattendus et peu satisfaisants qui ne correspondent pas
à la stratégie voulue. Cette méthode a été
classée inutilisable vu les inconvénients qu'elle
présente.
Conclusion générale
L'objectif principal du travail décrit dans ce
mémoire était d'appliquer les théories de la poursuite
cyclique et du rapetissement de courbe au problème de la
stratégie de rendez-vous dans les systèmes multi-agents.
Une première partie fut l'initiation et la
compréhension de ce domaine des SMA, et plus particulièrement
à son application aux groupes de robots mobiles et à la
stratégie de rendez-vous.
A titre préparatoire, nous avons mis en oeuvre les
algorithmes des solutions proposées sous Matlab; une étape qui
fut à la fois simple et importante à la compréhension du
comportement d'agents et l'optimisation des algorithmes. Nous avons
également réalisé une interface graphique sous Java pour
la simulation du comportement des agents utilisant les différentes
approches pour effectuer la stratégie précitée et qui nous
a permis d'évaluer certaines valeurs de convergence, afin de comparer
entre ces méthodes.
Au cours des tests de simulation, nous avons
éliminé la méthode de la courbure de MengerMelnikov qui a
révélé un comportement inadapté à la
stratégie du rapetissement de courbe et au problème de
rendez-vous.
Ce travail accompli pourrait servir à
implémenter l'autre stratégie de Smith qui est la stabilisation
à une formation où un groupe d'agents mobiles doit être
stabilisé pour former les sommets d'un polygone
équilatéral et où le centre de gravité du polygone
reste statique pendant l'évolution. On pourrait aussi déplacer le
centre des agents et créer ainsi une stratégie de navigation du
groupe mené par un agent leader positionné au centre qui sera
dynamique.
Bibliographie
[1] Stephen L. Smith. «Strategies for RendezVous and
Formation stabilization of Multi-Agents Systems », University of Toronto,
2005
[2] J. ferber « Les systèmes multiagents vers une
intelligence collective » Lien : http : //
jbenech.free.fr/old_site/agents/html/P-definition.html
[3] Lemlouma Tayeb, Boudina Abdelmadjid. «L'intelligence
Artificielle Distribuée et les systèmes multi-agents »
[4] Drogoul, A.; Corbara, B.; Lalande, S. 1995. "MANTA : New
Experi-
mental Results on the Emergence of (Artificial) Ant Societies", Lien
: http : //
www.limsi.fr/'jps/enseignement/examsma/2003/ISRAEL
_GAUCHOU/SMA.html
[5] C.W.Raynolds, «Flock, heard and scools : A distributed
behavioral mode.», http ://
www.red3d.com/cwr/boids/
[6] Marc Côté et Nader Troudi, NetSA : "Une
architecture multiagent pour la recherche sur Inter- net" Département
d'Informatique, Université Laval
[7] La norme ISO 8373(1994)
[8] M.Mataric, « Designing emergent behavior : From local
interaction to collective intelligence », Lien : http ://
www.complexity.org.au/ci/draft/draft/schaef0
1/schaef01s.ps
[9] Projet mars explorer de l'équipe SMAC, l'IUT
d'Informatique de Lille I, Lien : http ://
www2.lifl.fr/~secq/projects/mars/site/
[10] P.R Lascaux. Théodor, «Analyse numérique
matricielle appliquée à l'art de l'ingénieur.»,
Dunod, 1994
[11] A.M. Bruckstein, N. Cohen, and J.J. Gray. Geometry.
Cambridge University Press, 1999.
[12] Jean Frédéric Frenet, Lien : http ://
fr.wikipedia.org/wiki/Rep%C3%A8re_de_Frenet
[13] M.Mokhtari, Matlab 5.2 & 5.3 et Simulink 2 & 3 pour
étudiants et ingénieurs, Edition Springer_Verlag Berlin
Heidelberg, 2000.
[14] Grady Booch , James Runbough, Ivar Jacobson, «UML, Le
guide de l'utilisateur», Paris Eyrolles, 2001
[15] Bruce Eckel, «Thinking in Java », Prentice Hall
PTR ISBN 0-13-659723-8, 1998
[16] Robert Michel Di Scala, «L'essenteil de l'informatique
et de la programmation», Algerie Edition BERTI, 2004
[17] David J. Eck, Introduction to Programming Using Java,
Edition 5.0, 2006. Lien : http : //
math.hws.edu/javanotes/
| 

