2.3. Les machines à réluctance variable
polydiscoïdes et à aimants permanents :
En remplaçant les dents du rotor par des aimants
permanents, l'expression des forces tangentielles n'est plus dépendante
uniquement de l'entrefer magnétique mais de la combinaison de l'entrefer
mécanique avec l'épaisseur des aimants. Or, si on veut
réduire l'entrefer magnétique, tout en maintenant l'entrefer
mécanique constant, il suffit de réduire l'épaisseur des
aimants. Une étude complète de GEC-ALSTHOM MOTEURS a permis de
révéler tout l'intérêt d'une telle machine. Les
principaux avantages de cette machine par rapport aux MRV discoïdes sont
les suivantes [2] :
- "Les machines sont excitées et fonctionnent dans
les quatre quadrants
flux-ampères-tours : les flux mis en jeu sont alors
moins importants et les machines se prêtent mieux à un facteur de
puissance plus élevé".
- "La loi d'induction d'excitation est pratiquement
sinusoïdale."
- "Les efforts tangentiels obtenus peuvent être
supérieurs d'un facteur 2 à ceux des MRV."
- "Il est vraisemblable que la machine à aimants
permanents alternés s'avère silencieuse."
On précise que le prototype à l'essai est une
maquette monodisque d'une machine à structure polydiscoïde.
2.4. Constitution du moteur FINTRONIC :
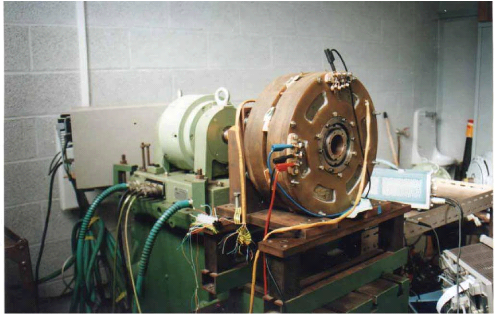
Fig. I-2.3 : Moteur FINTRONIC vu sur son banc
d'essais.
L'ensemble du gabarit fait environ 300 mm de diamètre,
150 mm d'épaisseur et 50 kg de masse. Les performances
électriques du moteur sont données pour 200 N.m nominale à
60 tr/min (64 Hz) et 300 N.m en pointe, soit un couple massique de 4 à
5N.m/kg.
Trois parties principales constituent le moteur :
· Le rotor forme la première partie du moteur.
Il est constitué d'un disque en acier massif d'épaisseur 10,5 mm,
boulonné sur l'épaulement d'un arbre creux. Chaque face du disque
est munie de 128 éléments d'aimants au Samarium-Cobalt du type
"RECOMA 28", disposés sur 2 étages et collés
alternativement Nord/Sud. Les aimants ont une épaisseur de 1,75 mm, un
pas polaire de 5,625° et un angle d'ouverture légèrement
inférieur à 2,5°.
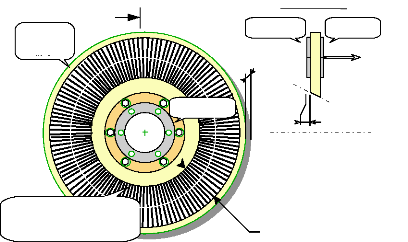
VUE SUIVANT F
F
Aimant Sud Aimant Nord
10,5
Flux
créé par les
aimants
arbre moteur
1,75mm
Axe de rotation
du rotor
ext :148,5mm int : 96mm
128 aimants
alternativement Nord/Sud
collés sur
chaque face du disque
disque
en
acier
Fig.I-2.4 : Rotor du moteur ; vue suivant l'arbre et vue
partielle suivant F.
· Les 2 disques "stator" forment la deuxième
partie du moteur. Chaque disque est constitué de 6 secteurs
(masse métallique formée de 9 plots) dont chaque secteur est
entouré d'un bobinage. Les bobinages sont connectés en
série et en parallèle de façon à constituer le
couplage étoile classique d'un moteur. Le tout est noyé dans une
résine assurant la légèreté et la solidité
de l'ensemble. La connection des 2 disques est assuré par des
broches.
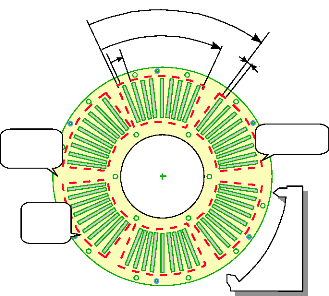
60°
50,63°
5,63°
2,81°
1
Structure
en
résine
3 '
2
plot statorique
Bobine
de phase
2 '
3
1'
Secteur
d' une
phase
Fig.I-2.5 : Disque "stator". Vue face en regard avec le
rotor.
Chaque enroulement de phase est constitué de 4 bobines
de secteur, branchées en série. Chaque bobine, formée de 3
brins en parallèle sur 79 spires, doit supporter 55 volts efficaces
à ces extrémités. Chaque phase est donc alimentée
sous 220 volts, soit une tension composée de 380 volts pour une
intensité nominale de 9,3A.
? Les 2 flasques d'extrémité forment la
troisième partie du moteur (culasses). Ils permettent de refermer, de
part et d'autre, les lignes de champs produites par le stator et le rotor.
Chaque flasque est constitué d'une tôle roulée
noyée, en partie, dans une structure en résine et plaquée
contre la face arrière de chaque stator. Une feuille isolante fine
sépare les pièces pour limiter les pertes magnétiques par
la circulation des courants de Foucault.
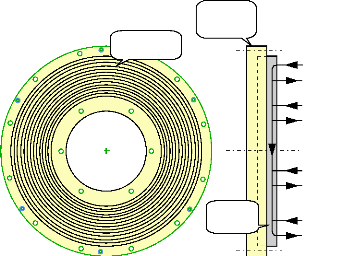
Structure
en
résine
Tôle roulée
Trajet
des
lignes de champs
Tôle roulée
Fig.I-2.6 : Flasque d'extrémité vu de face et de
côté.
On représente le moteur par une vue éclatée
et schématisée de la façon suivante:
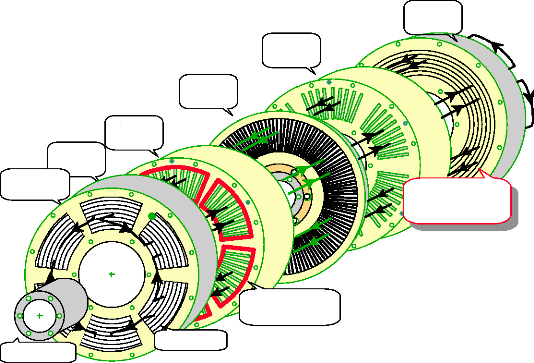
culasse
n° 2
stator
n° 2
rotor
stator n° 1
culasse
n°1
bornes de
raccordement
trajet des paquets
de lignes de
champ
bobine entourant
le secteur
tole roulée
Arbre moteur
Fig.I-2.7 : Vue schématique et éclatée
du moteur FINTRONIC.
En se placant sur l'un des plots statoriques du moteur, les
lignes de champs induites par les courants au stator traversent : les aimants,
un entrefer mécanique constant et le disque "rotor" en acier
lisse. La perméabilité relative des aimants étant voisine
de l'air (1,05), telle que l'annonce le constructeur des aimants UGIMAG
(aimants à terre rare RECOMA 28), le déplacement du rotor impose
aucune variation de la réluctance sur le circuit magnétique.
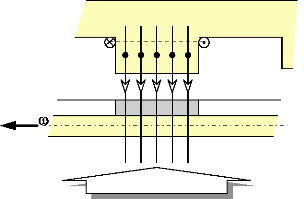
s
Pas de réluctance variable
N
Wi Stator
(fixe)
Rotor
s
(mobile)
Fig.I-2.8 : Représentation des lignes de champs
induites par le stator.
Par contre, les lignes de champs produites par cet aimant
traversent un entrefer variable (aimantation axiale) qui est dû
essentiellement à la présence des parties saillantes des plots
statoriques. On justifie ainsi l'appellation de
Moteur à réluctance variable.
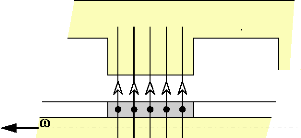
s
N
Waim
Rotor
Stator
s
(fixe)
(mobile)

Réluctance variable
Fig.I-2.9 : Représentation des lignes de champs
induites par le rotor.
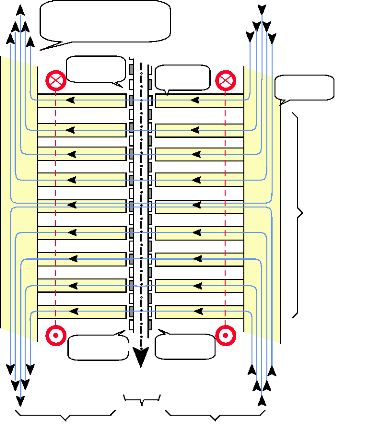
On représente le parcours d'une partie des lignes de
champs, traversant les pièces du moteur, par les 2 figures qui
suivent.
0° 120° électrique 240°
360°

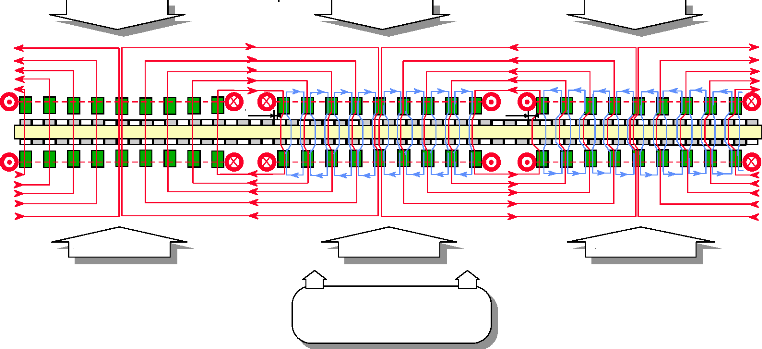
Secteur 1 / phase 1 Secteur 1 / phase 2 Secteur 1 / phase 3
Secteur 1 / phase 1 '
1/3
Représentation de quelques
lignes de champs qui se
referment
par la culasse (non représentée)
Secteur 1 / phase 2 '
rotor
2/3
Secteur 1 / phase 3 '
Fig.I-2.10 : Trajet des lignes de champs sur 1 tour
électrique. Vue développée.
Disque
Disque stator n°1
Lignes de champs qui se referment
par les 4 plots et demi
statoriques
du secteur adjacent
Entrefer
mécanique
Aimant sud Aimant nord
Sens de déplacement
du rotor
rotor
Plot
statorique
Disque stator n°2
Culasse
Secteur comprenant
9 plots
statoriques
Fig.I-2.11: Trajet des lignes de champs sur 1 secteur de
phase. Vue développée.
Après cette présentation du moteur discoïde
à réluctance variable et à aimants permanents
alternés (MDRVAP), nous allons définir le système
d'équations différentielles, capable de représenter
mathématiquement le comportement physique du moteur.
| 

