I.3 LES DIFFERENTS TYPES DE SURVEILLANCE « MONITORING
»
Nous distinguons deux types de surveillance : la surveillance
du système opérant et la surveillance de la commande. La
surveillance du système opérant se décompose
elle-même en deux types de surveillance à savoir la surveillance
curative et la surveillance prédictive.
Ø Surveillance de la commande
Basée sur la notion de filtre de commande, elle permet
de vérifier que les ordres émis sont conformes à
l'état de la partie opérative. Le concept d'Objet Commandable
Elémentaire (OCE) a été développé pour la
conception de ces filtres de commande.
Ø Surveillance du système
opérant
Elle a en charge la surveillance des défaillances du
procédé qui, dans le cadre de la sureté de fonctionnement,
sont classées en deux catégories : les défaillances
cataleptiques et les défaillances progressive :
- Les défaillances cataleptiques : ce sont les
défaillances soudaines et complètes. Il y a passage, sans
transition d'un état de fonctionnement normal à un état de
panne ;
- Les défaillances progressives : ce sont des
défaillances partielles et graduelles.
La figure suivante présente les différents types de
surveillance.
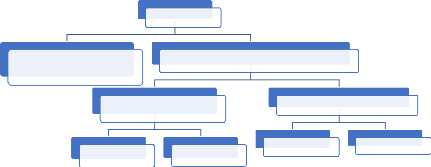
Surveillance de la commande
Directe Indirecte
Surveillance prédictive
Surveillance
Surveillance du système opérant
Directe Indirecte
Surveillance curative
6
Figure 1: Différents types de surveillance
[5]
· 7
La surveillance prédictive
Elle peut être directe ou indirecte, le principe de la
surveillance prédictive direct est fondé sur l'analyse des
signaux, l'analyse des données et sur l'étude des processus
stochastiques pour connaitre l'état réel de
l'élément et évaluer sa durée de vie restante.
La surveillance prédictive indirecte prend en compte tous
les types de matériels ayant des défaillances se manifestant par
une baisse de la qualité ou de la quantité des produits
fabriqués. Elle utilise des paramètres tels que le flux de
production ou la qualité des produits (JER,06).
· La surveillance curative
Elle comporte deux fonctions : la détection et le
diagnostic. La détection est formée dépendante de la
contrainte temps réel. Son rôle est d'analyser le comportement de
la partie opérative pour générer des symptômes en
cas de dysfonctionnement.
Le diagnostic est basé sur un mécanisme
constitué de deux étapes : la première étape
consiste en une localisation du sous-systèmes fonctionnels
défaillants, à partir des symptômes signalés par la
détection. Elle est réalisée par une interprétation
des symptômes au fur et à mesure de leur occurrence. Cette
étape utilise un modèle de connaissance obtenu à partir
d'une analyse fonctionnelle du système à surveiller. Ce
modèle est traduit sous formes de signatures temporelles causales.
La deuxième étape permet l'identification des
causes premières des défaillances ainsi que l'analyse de leurs
conséquences. Elle est basée sur un graphe fonctionnel qui
modélise les relations causales liant les fonctions internes du
système à ses fonctions principales.
| 

