5.4 PORT D :
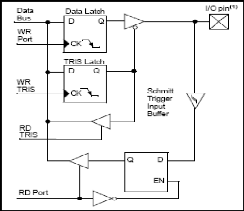
C'est un port 8 bits bidirectionnel, la configuration de ce port
se fait à l'aide du registre TRISD. Les registres associés sont
:
|
Nom
|
Bit7
|
Bit6
|
Bit5
|
Bit4
|
Bit3
|
Bit2
|
Bit1
|
Bit0
|
|
PORTD
|
RD7
|
RD6
|
RD5
|
RD4
|
RD3
|
RD2
|
RD1
|
RD0
|
|
TRISD
|
Registre de Direction du PORTD
|
|
TRISE
|
IBF
|
OBF
|
IBOV
|
PSPMODE
|
x
|
Registre de direction
|
V' Registre TRISD :
Chaque broche est configurable en entrée ou en sortie.
Pour la configurer en entrée le TRISD doit être mis à 1,
sinon 0 en sortie.
Le PORTD peut être utilisé dans un mode
particulier appelé " parallel slave port
" pour cela il faut placer le bit 4 (PSPMODE) de
TRISE à 1. Dans ce cas les 3 bits de PORTE deviennent les entrées
de control de ce port (RE, WE et CS).


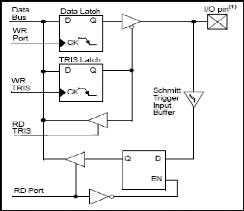
5.5 PORT E :
Le PORTE contient seulement 3 bits RE0, RE1 et RE2. Les 3 bits
sont configurables en entrée ou en sortie à l'aide du registre
TRISE.
Les 3 bits de PORTE peuvent être utilisés soit
comme E/S numériques soit comme entrées analogiques du CAN. La
configuration se fait à l'aide du registre ADCON1. Les registres
associés sont :
|
Nom
|
Bit7
|
Bit6
|
Bit5
|
Bit4
|
Bit3
|
Bit2
|
Bit1
|
Bit0
|
|
PORTE
|
X
|
X
|
x
|
x
|
x
|
RE2
|
RE1
|
RE0
|
|
TRISE
|
Registre de Direction du PORTE
|
|
ADCON1
|
ADFM
|
X
|
x
|
x
|
PCFG3
|
PCFG2
|
PCFG1
|
PCFG0
|
V' Registre TRISE :
Si TRISE est placé à 1, Les trois bits de ce
port deviennent les entrées de control du PORTD qui fonctionne en mode "
parallel slave port ".A la mise sous tension
(RESET), les 3 broches du PORTE sont configurés en entrées
analogiques.
V' Registre ADCON1 :
Ce registre sera étudié dans le chapitre concernant
le CAN.


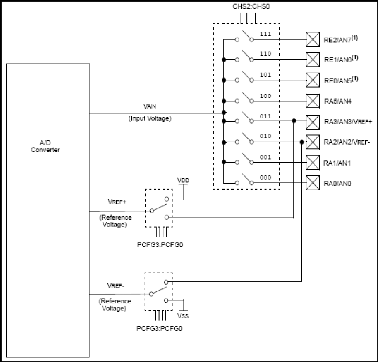
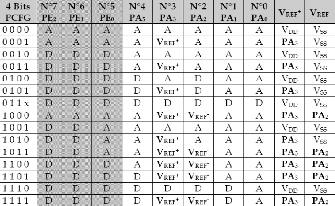
6. Module de conversion A/N :
6.1 Caractéristiques générales du
module A/D :
Le convertisseur A/D convertit le signal analogique
présent sur une de ses 8 entrées en son équivalent
numérique, codé sur 10 bits.
Les pattes AN2 et AN3 peuvent être utilisées comme
références de tension ou comme entrées analogiques
standard. Les tensions de référence haute et basse peuvent
être choisies par programmation parmi: VDD (broche PA3) pour VREF+ et VSS
(broche PA2) pour VREF- .On peut donc numériser jusqu'à 8 signaux
analogiques.
Pas tous en même temps, étant donné qu'il n'y
a qu'un seul module de conversion
pour 8 signaux d'entrées multiplexées. Mais si les
signaux n'évoluent pas trop vite (fréquence basse), la
numérisation du signal se fait sur la patte AN0, puis sur AN1...
Les paramètres importants dont il faudra tenir compte sont
:
· La résolution du convertisseur. Ici 10 bits, donc
meilleur qu'un convertisseur 8 bits, mais moins précis qu'un 12 bits.
· Le temps de conversion.
· La rapidité d'évolution des signaux
présents sur les entrées (leur fréquence pour des signaux
périodiques).
· Le nombre de signaux à numériser.


Figure I.13 : Schéma Interne du
convertisseur analogique/numérique
Registres associés avec le module
A/D
Nom
|
Bit7
|
Bit6
|
Bit5
|
Bit4
|
Bit3
|
Bit2
|
Bit1
|
Bit0
|
INTCON
|
GIE
|
PEIE
|
TOIE
|
INTE
|
RBIE
|
TOIF
|
INTF
|
RBIF
|
PIR1
|
PSPIF
|
ADIF
|
RCIF
|
TXIF
|
SSPIF
|
CCP 1IF
|
TMR2IF
|
TMR1IF
|
PIE1
|
PSPIE
|
ADIE
|
RCIE
|
TXIE
|
SSPIE
|
CCP 1IE
|
TMR2IE
|
TMR1IE
|
ADRESH
|
MSB du résultat du module A/D
|
ADRESL
|
LSB du résultat du module A/D
|
ADCON0
|
ADSC1
|
ADSC0
|
CHS2
|
CHS1
|
CHS0
|
GO/DONE
|
x
|
ADON
|
ADCON1
|
ADFM
|
x
|
x
|
x
|
PCFG3
|
PCFG2
|
PCFG1
|
PCFG0
|
PORTA
|
x
|
x
|
Pins D'Entrées Sorties du PORTA
|
TRISA
|
Registre de Direction du PORTA
|
PORTE
|
x
|
x
|
x
|
x
|
x
|
Pins D'Entrées Sorties du PORTE
|
TRISE
|
Registre de Direction du PORTE
|
|


y' Registre ADCON0 :
Au reset : ADCON0 = 00000000
ADSC1 ADSC0: Clock Select bits.
Ces 2 bits permettent de choisir la vitesse de conversion :
00= Fosc/2 - 01= Fosc/8 - 10= Fosc/32 - 11= Oscillateur RC
interne. CHS2 CHS1 CHS0: Channel Select bits.
Ces 3 bits permettent de choisir l'entrée qui va
être convertie.
Canal
|
CHS2
|
CHS1
|
CHS0
|
PORT
|
0
|
0
|
0
|
0
|
RA0
|
1
|
0
|
0
|
1
|
RA1
|
2
|
0
|
1
|
0
|
RA2
|
3
|
0
|
1
|
1
|
RA3
|
4
|
1
|
0
|
0
|
RA5
|
5
|
1
|
0
|
1
|
RE0
|
6
|
1
|
1
|
0
|
RE1
|
7
|
1
|
1
|
1
|
RE2
|
|
GO/DONE: 1 = Démarre la conversion A/D -
0 = La conversion A/D est terminée. ADON
: 1 = Convertisseur A/D en service - 0 =
Convertisseur A/D à l'arrêt.
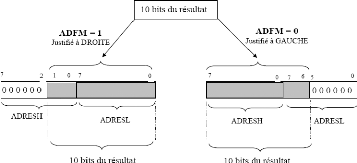
y' Registre ADCON1:
Au reset : ADCON1 = 00000000
ADFM: A/D Result format.
1= Justifié à droite. ADRESH ne
contient que les 2 MSB du résultat. Les 6 MSB de ce registre sont lus
comme des "0".
0= Justifié à gauche. ADRESL ne
contient que les 2 LSB du résultat. Les 6 LSB de ce registre sont lus
comme des "0".
Figure I.14 : Schéma de justification de
la donnée convertie
PCFG3 PCFG2 PCFG1 et PCFG0 : Bits de
contrôle de la configuration des Ports. Ces bits permettent de choisir le
partage entre entrées analogiques et digitales sur les PORTS A et E.


7. Interface série asynchrone :
L'USART: "Universal Synchronous Asynchronous Receiver
Transmitter" ou "SCI" en anglais (Serial
Communication Interface) est l'un des deux modules de
communication série du PIC. Comme son nom l'indique, il
peut établir une liaison synchrone ou asynchrone, recevoir et
transmettre des données, selon la manière dont il est
configuré.
L'USART permet de communiquer avec le reste du monde : un
ordinateur ou tout autre matériel équipé d'une interface
série RS232, des circuits intégrés convertisseurs
Numérique/Analogique ou Analogique/Numérique, des EEPROMs
série...
La communication se fait sur les deux broches RC6/TX et RC7/RX
qui doivent être configurés toutes les deux en entrée par
TRISC.
L'USART peut être configurée selon 3 modes :
· Asynchrone (Full Duplex).
· Synchrone Maître (Half Duplex).
· Synchrone Esclave (Half Duplex). Figure
I.15 : Schéma interne du port en transmission
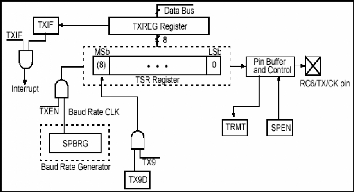


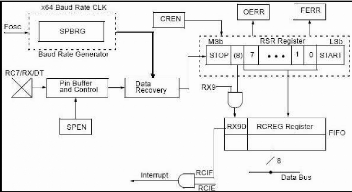
Figure I.16 : Schéma interne du port en
réception
Registres associés avec
L'USART
Nom
|
Bit7
|
Bit6
|
Bit5
|
Bit4
|
Bit3
|
Bit2
|
Bit1
|
Bit0
|
INTCON
|
GIE
|
PEIE
|
TOIE
|
INTE
|
RBIE
|
TOIF
|
INTF
|
RBIF
|
PIR1
|
PSPIF
|
ADIF
|
RCIF
|
TXIF
|
SSPIF
|
CCP1IF
|
TMR2IF
|
TMR1IF
|
PIE1
|
PSPIE
|
ADIE
|
RCIE
|
TXIE
|
SSPIE
|
CCP1IE
|
TMR2IE
|
TMR1IE
|
RCSTA
|
SPEN
|
RX9
|
SREN
|
CREN
|
x
|
FERR
|
OERR
|
RX9D
|
TXREG
|
USART Transmettent Le Registre
|
TXSTA
|
CSRC
|
TX9
|
TXEN
|
SYNC
|
x
|
BRGH
|
TRMT
|
TX9D
|
SPBRG
|
Registre De Générateur De Vitesse
baud
|
|
V' Registre TXSTA : Registre d'état
Emission
Au reset : TXSTA = 00000010
CSRC : Clock Source en synchrone. (Sans
importance en asynchrone) TX9 : Autorisation d'émission
sur 9 bits. 1= Autorisé - 0 = Non
autorisé. TXEN :Autorisation d'émission.
1= Autorisé - 0 = Non
autorisé.
SYNC : Sélection mode Synchrone /
Asynchrone.
1= Mode synchrone - 0 = Mode
asynchrone.
BRGH : Sélection vitesse rapide en mode
asynchrone.
1 = Vitesse haute sélectionnée -
0 = Vitesse basse sélectionnée.
TRMT : bit d'état du registre à
décalage Emission.
1 = Registre vide, émission
terminée - 0 = Registre plein, émission en
cours. TX9D : 9eme bit de Données transmise. Ce bit
peut être le bit de la parité.
V' Le Registre RCSTA : Registre d'état
Réception
Au reset : RCSTA = 0000000x
SPEN : Serial Port Enable. PC7 et PC6
configurés pour le port série. 1 = Port
série en service - 0 = Port série
désactivé.
RX9 : Autorisation de réception sur 9
bits. 1 = Autorisé - 0 = Non
autorisé.


SREN : Single Receive Enable.
Réservé pour mode Synchrone. (Non utilisé en mode
Asynchrone)
CREN :Continous Receive Enable.
1 = Autorise la réception - 0 =
Désactive la réception. ADDEN: Adress Detect
Enable. En mode Asynchrone 9 bits:
1 = Autorise la détection d'adresse, et
charge la donnée dans le registre de réception RCREG quand le
9eme bit du registre de dé sérialisation vaut "1".
0 = Dé sélecte la
détection d'adresse. Tous les octets sont reçus et le 9eme bit
peut servir de bit de parité.
FERR :Framing Error.
1 = Une erreur de Framing est survenue -
0 = Pas d'erreur de Framing.
OERR :Overrun Error.Un octet est reçu
alors que le registre de réception n'a pas été vidé
par lecture. 1 = Erreur Overrun - 0 = Pas
d'erreur Overrun.
RX9D : 9eme bit de Data reçue, ce bit
peut être le bit de la parité.
y' Registre SPRBGH :
Le Baud Rate Generator est un registre 8 bits qui contient le
facteur de division (N) de l'horloge interne qui permet d'obtenir la vitesse
commune d'émission et de réception. BRGH=1 Vitesses haute -
BRGH=0 Vitesses basse.
I Registre TXREG : Registre
d'émission.
L'émission est autorisée par la mise à
"1" du bit TXEN. La donnée à transmettre est
mise dans le registre TXREG, TXIF = 1 le registre
prévient qu'il est vide, ce flag passe à "0" dés que l'on
charge un octet dans le registre TXREG. Il repasse à
"1" par Hard. Ce flag passe à "0" dés que l'on charge un octet
dans le registre TXREG. Il repasse à "1" par Hard quand
le registre est vidé par transfert dans le registre de
sérialisation : TSR. Ce registre n'est pas accessible
par l'utilisateur, il n'a pas d'adresse.
Le flag TXIF permet aussi de générer une
interruption, à condition qu'elle soit
autorisée par mettre TXIE = 1. Il faut dans ce cas
autoriser les interruptions des périphériques par mise à
PEIE = 1, et par poser GIE = 1. (Pout l'émission et la
réception)
I Registre RCREG: Registre Réception
L'émission est autorisée par TXEN
= 1.La donnée à transmettre est mise dans le registre
TXREG. Ce registre prévient qu'il est vide en mettant
le flag TXIF à "1". Ce flag passe à "0"
dés que l'on charge un octet dans le registre TXREG. Il
repasse à "1" par Hard quand le registre est vidé par transfert
dans le registre de sérialisation TSR.
Le bit TRMT informe sur l'état du registre TSR. Quand
le registre TSR n'a pas fini de sérialisé, TRMT=0. Ce flag
repasse à "1" quand le registre est vide, c'est à dire quand le
stop a été émis.
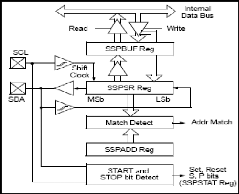
8. Module MSSP (Master Synchronous Serial Port) :
Le module SSP est la deuxième interface de communication
série du PIC.
En fait, il s'agit d'un port Maître, donc l'appellation
exacte est MSSP : « Master Synchronous Serial Port ». Il est
utile pour communiquer avec d'autres modules ou microcontrôleurs, des
EEPROMs séries, des registres à décalage, des afficheurs,
des convertisseurs A/N.
Il peut fonctionner dans deux modes de communication :
· Le mode SPI (Serial Peripheral Interface).
· Le mode I2C (Inter-Integrated Circuit).
L'utilisation de l'un de ces deux modules de communication,
USART ou MSSP dépend donc essentiellement du protocole de communication
nécessaire.


Schématiquement, l'USART est bien adaptée pour
communiquer avec le reste de l'univers via la célèbre interface
RS232 alors que le MSSP permet de communiquer aisément avec d'autres
composants électroniques à interface série.
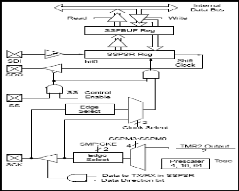
Figure I.17 : Schéma interne du module
MSSP en mode SPI
Registres associés avec Le MSSP en mode
SPI
Nom
|
Bit7
|
Bit6
|
Bit5
|
Bit4
|
Bit3
|
Bit2
|
Bit1
|
Bit0
|
INTCON
|
GIE
|
PEIE
|
TOIE
|
INTE
|
RBIE
|
TOIF
|
INTF
|
RBIF
|
PIR1
|
PSPIF
|
ADIF
|
RCIF
|
TXIF
|
SSPIF
|
CCP1IF
|
TMR2IF
|
TMR1IF
|
PIE1
|
PSPIE
|
ADIE
|
RCIE
|
TXIE
|
SSPIE
|
CCP1IE
|
TMR2IE
|
TMR1IE
|
SSPBUF
|
Le Port série Synchrone Reçoivent buffer
/ Transmettre Le Registre
|
SSPCON
|
WCOL
|
SSPOV
|
SSPEN
|
CKP
|
SSPM3
|
SSPM2
|
SSPM1
|
SSPM0
|
SSPSTAT
|
SMP
|
CKE
|
D/A
|
P
|
S
|
R/W
|
UA
|
BF
|
|
Figure I.18 : Schéma interne du module
MSSP en mode I2C


Registres associés avec Le MSSP en mode I2C
Nom
|
Bit7
|
Bit6
|
Bit5
|
Bit4
|
Bit3
|
Bit2
|
Bit1
|
Bit0
|
INTCON
|
GIE
|
PEIE
|
TOIE
|
INTE
|
RBIE
|
TOIF
|
INTF
|
RBIF
|
PIR1
|
PSPIF
|
ADIF
|
RCIF
|
TXIF
|
SSPIF
|
CCP 1IF
|
TMR2IF
|
TMR1IF
|
PIE1
|
PSPIE
|
ADIE
|
RCIE
|
TXIE
|
SSPIE
|
CCP1IE
|
TMR2IE
|
TMR1IE
|
PIR2
|
X
|
(2)
|
x
|
EEIF
|
BCLIF
|
x
|
x
|
CCP2IF
|
PIE2
|
X
|
(2)
|
x
|
EEIE
|
BCLIE
|
x
|
x
|
CCP2IE
|
SSPBUF
|
Le Port série Synchrone Reçoivent buffer
/ Transmettre Le Registre
|
SSPCON
|
WCOL
|
SSPOV
|
SSPEN
|
CKP
|
SSPM3
|
SSPM2
|
SSPM1
|
SSPM0
|
SSPCON2
|
GCEN
|
ACKSTAT
|
ACKDT
|
ACKEN
|
RCEN
|
PEN
|
RSEN
|
SEN
|
SSPADD
|
Adresse D'Esclave d'I2C/ / Registre Maitre De Vitesse
baud
|
SSPSTAT
|
SMP
|
CKE
|
D/A
|
P
|
S
|
R/W
|
UA
|
BF
|
|
V' Registre SSPSTAT : registre d'état Au
reset : SSPSTAT = 00000000
SMP : bit d'échantillonnage.
CKE : Clock Edge Select. Ce bit à "0" :
conforme aux spécifications I2C.
D/A: Data / Adresse bit.
1 = indique que le dernier octet reçu
est une donnée
0 = indique que le dernier octet reçu
est une adresse.
P : STOP bit. Ce bit est remis à "0"
quand le module SSP est désactivé.
1 = un Stop a été
détecté. - 0 = il n'a pas détecté
le Stop.
S : START bit. Ce bit est remis à "0"
quand le module SSP est désactivé.
1 = un Start a été
détecté. - 0 = il n'a pas été
détecté de Start.
R/W : Information sur le bit R/W. Donne la
valeur de ce bit qui suit la dernière adresse. Ce
bit est valable jusqu'à la réception du STOP.
Mode ESCLAVE : 1 = R - 0 = W. Mode
MAITRE : 1 = Transmission en cours - 0 = Pas de
transmission en cours.
UA : mise à jour adresse. Utilisé
en mode 10 bits seulement.
BF : Buffer plein.
Mode Réception I2C:
Registre plein =1 : réception terminée - Registre
vide= 0: donc réception non
terminée.
Mode Emission I2C:
Registre plein =1: donc émission en
cours. Registre vide= 0 : donc émission
terminée.
V' Registre SSPCON : registre de
contrôle
Au reset : SSPCON = 00000000
WCOL : détection de collision à
l'écriture.
1 = Collision à l'écriture. - 0 = Pas de
collision.
SSPOV : Overflow indicator en
réception.Doit être remis à "0" par soft
1 = Un octet vient d'être reçu dans le buffer:
Overflow.- 0 = Pas d'Overflow.


SSPEN : Enable Module SSP.
1 = Module I2C activé et pin SCL et SDA sur PC3 et PC4
configurées. 0 = Module I2C désactivé. PC3 et PC4 libres
pour usage I/O.
CKP : Polarité du Clock.
Inutilisé en mode maître.
Mode Esclave : 1 = Autorise horloge. - 0 =
Maintient CLK = 0.
SSPM3, SSPM2, SSPM1et SSPM0 : Select Mode.
SSPM3
|
SSPM2
|
SSPM1
|
SSPM0
|
MODE
|
0
|
1
|
1
|
0
|
I2C esclave 7 bits
|
0
|
1
|
1
|
1
|
I2C esclave 10 bits
|
1
|
0
|
0
|
0
|
I2C maitre CLK =Fosj4(sspadd+1)
|
|
I Registre SSPCON2 : registre de contrôle
n°2.
Au reset : SSPCON2 = 00000000
GCEN : Appel général en mode I2C
esclave seulement.
1 = Autorise IT quand une adresse appel général
(h'0000) est reçue.
0 = Adresse appel général
désactivée.
ACKSTAT : Bit d'ACK en mode I2C maître
seulement.
1 = Pas de ACK reçu de l'esclave - 0 = ACK de l'esclave a
été reçu.
ACKDT : ACK Data bit. En mode maître et
réception : valeur qui sera transmise quand on va lancer une
séquence de ACK en fin de réception.
1 = NO ACK - 0 = ACK.
ACKEN: ACK Sequence Enable. En mode
maître et réception, lance une séquence d'ACK ou de NOACK
suivant la valeur dans ACKDT.
1 = Lance la séquence de ACK et transmet ACKDT. Remis
à "0" par hard. 0 = Pas de séquence d'ACK.
RCEN : Receive Enable Bit. En mode I2C
maître seulement.
1 = Autorise mode réception- 0 = Pas de réception
autorisée.
PEN : Stop Condition Enable. En mode I2C
maître seulement.
1 = Lance la séquence de STOP sur SDA et SCL. Remis
à "0" par hard
0= Pas de séquence de STOP
RSEN : Repeated Start Condition. En mode I2C
maître seulement.
1 = Séquence de répétition de START sur SDA
et SCL. Remis à "0" par hard. 0 = Pas de séquence de
répétition de START.
SEN = Start Condition Enable. En mode I2C
maître seulement.
1 = Lance la séquence de START sur SDA et SCL. Remis
à "0" par hard. 0 = Pas de séquence de START.
MODE MAITRE :
Les pins SDA et SCL sont manipulées par le Hard. Les
événements qui causent le passage à "1" du flag S SPIF et
éventuellement une si elles sont autorisées, sont :
- Condition de START.- Condition de STOP.-
Répétition d'un START. - ACK après un
transfert et Transfert d'octet en Emission ou réception.
(Le flag SSPIF doit être remis à "0" par soft).
Lancement d'un START:
L'utilisateur doit mettre le bit SEN "1". Les pins SDA et SCL
étant toutes les deux à "1 ", le module fait passer la pin SDA de
"1" à "0" ce qui génère une condition de START.


Le bit S passe à "1" pour signaler le START. A la fin du
START, le bit SEN est remis à "0" par le hard. Dés que le flag
SSPIF passe à "1" pour signaler la fin du START, on peut charger le
registre de transmission SSBUF avec l'octet à transmettre. (Ne pas
oublier de remettre ce flag à "0"par le soft).
Transmission :
Dés que le registre SSBUF est chargé, BF passe
à "1" pour signaler que la transmission est en cours. Au 8eme coup de
CLK, la transmission est terminée et le BF repasse à "0".
Acquittement :
Quand l'esclave répond l'ACK, le bit ACKSTAT passe
à "0". La fin de l'ACK est signalée par le Flag SSPIF qui passe
à "1". On doit alors remettre ce flag à "0"par soft.
Lancement d'un STOP :
L'utilisateur doit mettre PEN à "1 ". Le module fait
alors passer SDA à "0" puis force
SCL à"1 ". Quand SCL est à "1" il fait passer SDA
de "0" à"1 ", ce qui génère une condition de STOP. P passe
à "1" pour signaler le STOP. A la fin du STOP, PEN est remis à
"0" par le hard.- Le flag SSPIF passe à "1" pour signaler la fin du
STOP.
Réponse du maître à l'esclave
:
Il s'agit soit d'un ACK soit d'un NOACK :
Positionner le bit ACKDT en fonction de la réponse
à faire. Mettre le bit ACKEN à "1". La
fin de transmission du ACK ou du non ACK est signalé par
le flag SSPIF qui passe à "1". (Ne pas oublier de le remettre à
"0" par soft)
Réception d'un octet par le maître
:
Pour cela il faut mettre le module en réception en
portant RCEN à "1 ". La fin de réception est signalée par
le passage à "1" du flag SSPIF, que l'on remettra à "0" par soft.
On peut alors lire l'octet reçu dans SSBUF.
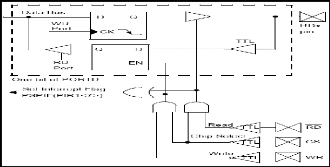
9. Port Parallèle Esclave (PSP : Parallel
Slave Port) :
Le Port Parallèle Esclave est un port 8 bits permettant
d'interfacer le PIC avec, par exemple, un autre microprocesseur. Les
données transitent via les lignes PSP0 à PSP7, qui
physiquement utilisent les mêmes broches que le PORTD. Le
flux de données est contrôlé par les lignes RD, WR et CS
qui correspondent aux broches du PORTE.C'est le microprocesseur externe qui est
le chef d'orchestre : il valide le PIC par la ligne CS (Chip Select), et
indique au PIC s'il lit ou écrivent grâce aux lignes RD (Read) et
WR (Write). D'où l'appellation de port parallèle esclave.
Esclave, puisque c'est le microprocesseur externe qui donne les ordres, le PIC
ne fait qu'exécuter.
Figure I.19 : Schéma interne du module
PSP


Registres associés avec le
PSP
Nom
|
Bit7
|
Bit6
|
Bit5
|
Bit4
|
Bit3
|
Bit2
|
Bit1
|
Bit0
|
PORTD
|
Verrou de données gauches une fois écrit
: Goupilles gauches une fois lu
|
PORTE
|
x
|
x
|
x
|
x
|
x
|
RE2
|
RE1
|
RE0
|
TRISE
|
IBF
|
OBF
|
IBOV
|
PSPMODE
|
x
|
PORTE Data Direction Bits
|
PIR1
|
PSPIF
|
ADIF
|
RCIF
|
TXIF
|
SSPIF
|
CCP1IF
|
TMR2IF
|
TMR1IF
|
PIE1
|
PSPIE
|
ADIE
|
RCIE
|
TXIE
|
SSPIE
|
CCP1IE
|
TMR2IE
|
TMR1IE
|
ADCON1
|
ADFM
|
x
|
x
|
x
|
PCFG3
|
PCFG2
|
PCFG1
|
PCFG0
|
|
PSPIE = Parallel Slave Port Interrup Enable
bit.
1= Autorise les interruptions R/W du port SSP.- 0=
Désactive toutes ces interruptions. PSPIF = Parallel
Slave Port Interrup Flag bit.
1 = Une opération de R/W vient d'avoir lieu sur le port
SSP.
0 =Il n'y a pas eu de R/W sur le port SSP.
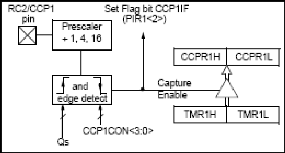
10. Modules CCP1 et CCP2 :
Ces deux modules sont identiques et composés chacun d'un
registre à 16 bits. Ils peuvent fonctionner dans l'un des trois modes
ci-dessous :
Mode capture (CAPTURE) : Ce mode permet d'effectuer des mesures
de temps.
Mode comparaison (COMPARE) : Ce mode permet de
générer des événements périodiques.
Mode PWM (PULSE WITH MODULATION): Ce mode permet de
générer des signaux dont le rapport cyclique est variable.
Ces modules sont associés aux broches R/CCP1 et
RC1/T1OSI/CCP2.
Suivant le mode choisit, les Timer1 ou Timer2 vont être
utilisés. Le mode Capture et le mode Comparaison utilise le Timer 1,
tandis que le mode PWM utilise le Timer2.
Figure I.20 : Schéma interne du module
CCP


Registres associés avec Le CCP1 et
CCP2
Nom
|
Bit7
|
Bit6
|
Bit5
|
Bit4
|
Bit3
|
Bit2
|
Bit1
|
Bit0
|
INTCON
|
GIE
|
PEIE
|
TOIE
|
INTE
|
RBIE
|
TOIF
|
INTF
|
RBIF
|
PIR1
|
PSPIF
|
ADIF
|
RCIF
|
TXIF
|
SSPIF
|
CCP1IF
|
TMR2IF
|
TMR1IF
|
PIE1
|
PSPIE
|
ADIE
|
RCIE
|
TXIE
|
SSPIE
|
CCP1IE
|
TMR2IE
|
TMR1IE
|
PIR2
|
x
|
(2)
|
x
|
EEIF
|
BCLIF
|
x
|
x
|
CCP2IF
|
PIE2
|
x
|
(2)
|
x
|
EEIE
|
BCLIE
|
x
|
x
|
CCP2IE
|
TRISC
|
Registre de Direction Du PORTC
|
T MR1L
|
En tenant l'inscription au moindre byte significatif du
TMR1 de 16 bit enregistrés
|
TMR1H
|
En tenant l'inscription au byte le plus significatif du
TMR1 de 16 bits enregistré
|
SSPSTAT
|
SMP
|
CKE
|
D/A
|
P
|
S
|
R/W
|
UA
|
BF
|
T1CON
|
x
|
x
|
T1CKPS1
|
T1CKPS0
|
T1OSCEN
|
T1SYNC
|
TMR1CS
|
TMR1ON
|
CCPR1L
|
Capture/Compare/PWM Register1 (LSB)
|
CCPR1H
|
Capture/Compare/PWM Register1 (MSB)
|
CCP1CON
|
x
|
x
|
CCP1X
|
CCP1Y
|
CCP1M3
|
CCP1M2
|
CCP1M1
|
CCP1M0
|
CCPR2L
|
Capture/Compare/PWM Register2 (LSB)
|
CCPR2H
|
Capture/Compare/PWM Register2 (MSB)
|
CCP2CON
|
x
|
x
|
CCP2X
|
CCP2Y
|
CCP2M3
|
CCP2M2
|
CCP2M1
|
CCP2M0
|
|
y' Registre CCP1CON :
Au reset : CCP1CON = 00000000
CCP1X et CCP1Y : Bits non utilisés en
modes Compare et Capture, ce sont les 2 bits LSB pour le Duty cycle en mode
PWM. Les 8 bits MSB sont dans le registre CCPR1L. CCP1M3 à
CCP1M0 : bits de sélection du mode.
0 0 0 0 = Module CCP stoppé.
0 1 0 0 = Mode Capture à chaque front descendant.
0 1 0 1 = Mode Capture à chaque front montant.
0 1 1 0 = Mode Capture tous les 4 fronts montants.
0 1 1 1 = Mode Capture tous les 16 fronts montants.
1 0 0 0 = Mode Compare. Pin de sortie mise à "1" et Flag
CCP 1IF = 1 à l'égalité. 1 0 0 1 = Mode Compare. Pin de
sortie mise à "0" et Flag CCP 1IF = 1 à
l'égalité.
1 0 1 0 = Mode Compare. Génération d'une
Interruption et Flag CCP1IF = 1 à l'égalité. 1 0 1 1 =
Mode Compare. Evénement spécial généré et
Flag CCP1IF = 1 à l'égalité.
1 1 x x = Mode PWM.
MODE COMPARE :
Les deux modules CCP étant identiques on ne
décrira que le module 1. Les 16 bits des registres CCPR1 (CCPR1H et
CCPR1L) sont constamment comparés avec le valeur sur 16 bits des
registres du Timer 1 (TMR1H et TMR1L). Quand il y a égalité, la
broche préalablement programmée en sortie P, passe soit à
"1" soit à "0" suivant la configuration des 4 bits CCP1M du registre
CCP1CON. Au même instant le Flag CCP1IF est mis à "1".


En mode Compare, les événements spéciaux
générés quand il y a égalité sont: - Pour
CCP1: reset du Timer 1.
- Pour CCP2 : reset du Timer 1 et démarrage d'une
conversion A/D.
Dans ce cas la broche de sortie n'est pas affectée, mais
le Flag CCP 1IF est mis à " 1". Il est rappelé que ce Flag doit
être remis à "0" par soft.
MODE CAPTURE :
Quand un événement extérieur
apparaît sur la broche préalablement programmée en
entrée P, la valeur des 16 bit des registres du Timer 1 (TMR1L et TMR1H)
est recopiée dans les registres CCPR1 (CCPRIH et CCPR1L). Cet
événement est programmable par les 4 bits CCP1M du registre
CCP1CON. La capture peut avoir lieu à chaque front descendant, à
chaque front montant, tous les 4 ou tous les 16 fronts montants. Quand la
capture a eu lieu, le flag CCP1IF est mis à "1". Ce bit doit être
remis à "0" par soft. Les fonctions de Capture et de Compare sur le
Timer 1 par les modules CCP1 et CCP2 peuvent générer une
interruption quand le Flag CCP1IF passe à "1" si le bit d'autorisation
CCP1IE du registre PIE1 est mis à "1".
MODE PWM :
Un signal PWM est caractérisé par une
période, et un temps de travail ou le signal est à "1 ". Ce temps
est appelé DUTY CYCLE. La broche P doit être configurée
comme une sortie en mettant le bit 2 de TRISC à "0".
Le signal PWM est fabriqué à partir du Timer 2. Le
signal interne Fosc/4 passe à travers le pré diviseur
programmable par 1, 4 ou 16 et fait compter TMR2.Quand ce registre atteint la
valeur écrite dans le registre PR2, trois événements se
produisent :
- RAZ du registre TMR2.
- La broche de sortie P est mise à "1 ", sauf si le Duty
cycle vaut 0.
- Chargement de la valeur du registre CCPR1L dans le registre de
Duty.
Quand le registre TMR2 atteint la valeur inscrite dans le
registre interne de Duty, c'est à dire la valeur qui avait
été inscrite dans CCPR1L, la broche de sortie P est remise
à "0". La période est déterminée par la relation
suivante :
T = [PR + 1]* 4 * T * valeur du
pré diviseur
La durée du Duty cycle est la valeur écrite dans
le registre 8 bits : CCPR1 L. La durée du signal au niveau "1" est
donnée par la relation :
D = [CCPR1L]* 4 * T * valeur
du pré diviseur
On peut avoir une meilleure r ésolution sur le Duty cycle
en utilisant les 2 bits de LSB réservés à cet effet dans
le registre CCP1CON.
Il s'agit de CCP1X et CCP1Y. La résolution est dans ce
cas divisée par 4. Si on appelle X le registre sur 10 bits,
constitué de ces 2 bits en LSB et des 8 bits de CCPR1L comme MSB, la
durée à "1" est donnée par la relation :
D = X * Tosc * valeur du pré
diviseur
Dans les 2 cas, quand on incrémente le registre CCPR1L de
une unité, le Duty cycle augmente d'une durée égale
à : 4.Tosc.valeur du pré diviseur.
Quand on passe à "1" le bit 5 la durée augmente de
2 x Tosc x pré div.
Quand on passe à "1" le bit 4 de CCP1CON, la durée
augmente de Tosc.pré div Si la durée du Duty cycle est
supérieure à la période, le signal n'est pas remis
à "0".


11. Timers :
Le PIC 16F877 dispose de 3 timers :
· Timer 0 (8 bits): Il peut être
incrémenté par des impulsions extérieures via la broche
(TOCKI/ RA4) ou par l'horloge interne (Fosc/4).
· Timer 1 (16 bits): Il peut être
incrémenté soit par l'horloge interne, ou soit par des impulsions
sur la broche T1CKI/RC0 ou par un oscillateur (RC ou quartz) connecté
sur les broches TOSO/RCO et T1OSI/RC1.
· Timer 2 (8 bits) : Il est
incrémenté par l'horloge interne, celle peut être
prédivisée. Tous ces timers peuvent déclencher une
interruption interne, s'ils ont été autorisés.
11.1 Timer0 :
C'est le plus ancien des timers implantés dans les PICs,
son ancienne appellation était
RTC, pour Real Time Clock (horloge temps réelle). On peut
se servir de celui-ci pour générer des événements
périodiques, comme le rafraîchissement d'afficheurs
multiplexés ou l'incrémentation de variables (secondes, minutes
...).
Registres associés avec Le
TMR0
Nom
|
Bit7
|
Bit6
|
Bit5
|
Bit4
|
Bit3
|
Bit2
|
Bit1
|
Bit0
|
TMR0
|
Registre compteur
|
INTCON
|
GIE
|
PEIE
|
T0IE
|
INTE
|
RBIE
|
T0IF
|
INTF
|
RBIF
|
OPTION_REG
|
RBPU
|
INTEDG
|
T0CS
|
T0SE
|
PSA
|
PS2
|
PS1
|
PS0
|
|
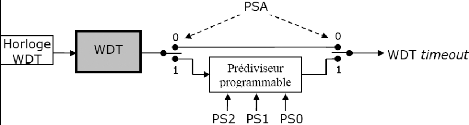
y' Registre OPTION : Au reset : OPTION =
11111111 TOCS: Timer TMR0 Clock Source select bit.
1 = L'horloge du Timer est l'entrée
PA4/Clk (pin 3).
0 = Le Timer utilise l'horloge interne du
PIC.
TOSE: Timer TMR0 Source Edge select bit.
1 = Le Timer s'incrémente à
chaque front montant de la broche PA4/Clk.
0 = Le Timer s'incrémente à chaque
front descendant de la broche PA4/Clk.
PSA : Prescaler Assignement bit.
1 = Le prédiviseur est affecté au
watchdog. - 0 = Le prédiviseur est affecté au
Timer
PS2 PS1 PS0: Prescaler Rate Select bits.
PS2
|
PS1
|
PS0
|
Prédiv Timer
|
Prédiv Watchdog
|
0
|
0
|
0
|
2
|
1
|
0
|
0
|
1
|
4
|
2
|
0
|
1
|
0
|
8
|
4
|
0
|
1
|
1
|
16
|
8
|
1
|
0
|
0
|
32
|
16
|
1
|
0
|
1
|
64
|
32
|
1
|
1
|
0
|
128
|
128
|
1
|
1
|
1
|
256
|
256
|
|


Figure I.21 : Schéma interne
simplifié du TMR0 sans le WA TCHDOG
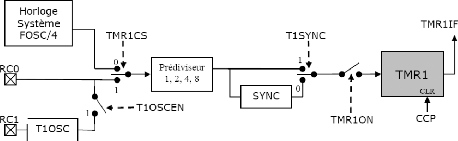
11.2 Le Timer1 :
Le Timer1 fonctionne sur le même principe que le
Timer0, mais avec un registre de
comptage plus gros : 16 bits au lieu de 8, ce qui étend
notablement ces capacités de comptage. Il est accessible en
lecture/écriture par l'intermédiaire des registres 8 bits TMR1H
et TMR1L, On le configure à l'aide du registre T1CON. On peut l'utiliser
en association avec un des modules CCP (modules de capture et
de comparaison)
Figure I.22 : Schéma interne du
TMR1
Registres associés avec Le TMR1
Nom
|
Bit7
|
Bit6
|
Bit5
|
Bit4
|
Bit3
|
Bit2
|
Bit1
|
Bit0
|
INTCON
|
GIE
|
PEIE
|
T0IE
|
INTE
|
RBIE
|
T0IF
|
INTF
|
RBIF
|
PIR1
|
PSPIF
|
ADIF
|
RCIF
|
TXIF
|
SSPIF
|
CCP1IF
|
TMR2IF
|
TMR1IF
|
PIE1
|
PSPI
|
ADIE
|
RCIE
|
TXIE
|
SSPIE
|
CCP1IE
|
TMR2IE
|
TMR1IE
|
TMR1L
|
Registre compteur ( 8bits) poids faible
|
TMR1H
|
Registre compteur (8 bits) pois fort
|
T1CON
|
x
|
x
|
T1CKPS1
|
T1CKPS0
|
T1OSCEN
|
T1SYNC
|
TMR1CS
|
TMR1ON
|
|


V' Le registre T1CON : Sélection du
pré diviseur placé avant le TIMER.
Au reset : T1CON = 00000000
T1CKPS1 T1CKPS0 : Bits Sélection du
pré diviseur placé avant le TIMER.
00 = Prédiviseur 1.
01 = Prédiviseur 2.
10 = Prédiviseur 4.
11 = Prédiviseur 8.
T1OSCEN : Bit d'autorisation de l'oscillateur
du Timer 1.
1 = oscillateur autorisé -0 = oscillateur
stoppé.
T1SYNC : Bit de contrôle de la
synchronisation du CLK externe.
1 = Pas de synchronisation de l'horloge externe. 0 =
Synchronisation de l'horloge
externe.
TMR1CS : Bit de sélection de la source
horloge.
1 = Mode Compteur: Clk externe sur la broche PC0 ou Quartz
entre PC0 et PC 1
0 = Mode Timer: Clk interne = Fosc/4.
TMR1ON : Bit d'autorisation du Timer 1.
1= Timer 1 en service. -0 = Timer 1 stoppé.
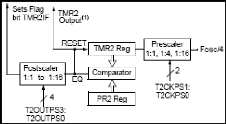
11.3 Le TIMER2 :
Le Timer2 a un fonctionnement différent des Timer0 et
Timer 1. C'est un compteur 8 bits avec prédiviseur et postdiviseur. Son
horloge ne peut être que l'horloge interne divisée
par 4 (Fosc/4).On s'en sert pour générer des
signaux carrés, ou, en association avec le module CCP, des signaux
PWM.
Figure I.23 : Schéma du
TMR2
Registres associés avec Le Timer2
Nom
|
Bit7
|
Bit6
|
Bit5
|
Bit4
|
Bit3
|
Bit2
|
Bit1
|
Bit0
|
INTCON
|
GIE
|
PEIE
|
T0IE
|
INTE
|
RBIE
|
T0IF
|
INTF
|
RBIF
|
PIR1
|
PSPIF
|
ADIF
|
RCIF
|
TXIF
|
SSPIF
|
CCP 1IF
|
TMR2IF
|
TMR1IF
|
PIE1
|
PSPI
|
ADIE
|
RCIE
|
TXIE
|
SSPIE
|
CCP1IE
|
TMR2IE
|
TMR1IE
|
TMR2
|
Registre compteur
|
T2CON
|
x
|
TOUTPS3
|
TOUTPS2
|
TOUTPS1
|
TOUTPS0
|
TMR2ON
|
T2CKPS1
|
T2CKPS0
|
|


V' Registre T2CON :
TOUTPS : Programmation du Post diviseur.
0 0 0 0 = post divise par 1. 0 0 0 1 = post
divise par 2. 0 0 1 0 = post divise par 3. . . . .
1 1 1 1 = post divise par 16.
TMR2ON : mise en service du Timer 2.
1= Timer 2 On.6- 0= Timer 2 Off.
T2CKPS : Programmation du pré
diviseur.
0 0= pré divise par 1.
0 1= pré divise par
4.
X= pré divise par 16.
TMR2IE : TMR2 Interrup Enable bit.
1= Autorise les interruptions du Timer 2 TMR2. - 0 =
Désactive cette interruption.
TMR2IF: TMR2 Interrup Flag bit.
1 = Le Timer2 a fait une IT. - 0 = Pas d'IT du TIMER 2.
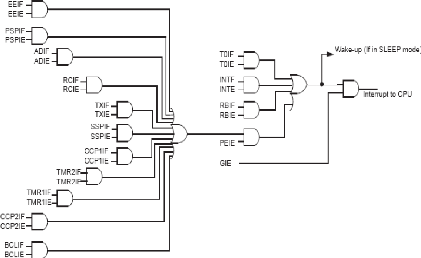
12. Les interruptions :
Le microcontrôleur dispose de 14 sources d'interruptions
:
· Une interruption externe, action sur la broche
INT/RB0.
· Débordement du Timer0.
· Changement d'état logique sur une des broches du
PORTB (RB4 à RB7).
· Fin de programmation d'une case mémoire de
l'EEPROM.
· Changement d'état sur le PORTD
· Fin de conversion analogique numérique
· Réception d'une information sur la liaison
série
· Fin d'émission d'une information sur la liaison
série
· Interruption SPI ou I2C du module MSSP
· interruption du registre de capture et/ou de comparaison
1
· Interruption du registre de capture et/ou de comparaison
2
· Débordement du Timer 1
· Débordement du Timer2
Une demande d'interruption ne peut aboutir au processeur que
si tous les bits d'autorisation
qui se trouvent sur son chemin sont activés.
Exécution
En cours
|
|
Save PC
0 GIE
|
|
Execution retour
SPI
|
|
Reprise exécution
Suspendue
|
|
V' Fonctionnement :
- Le proceseur est en cour d'exécution (un programme ou
un sous programme). - Un evenemment=> arrive FLAG mis à 1
=>demmande d'intruption :
Si les bits d'otorisation sont validées le processeur
répond.
- Le processeur sauvegarde le PC dans la pile et mis à 0
le bit de contrôle GIE .ce ci à fin d'éviter que le CPU ait
éventuellement intérempu pendant l'éxécution du
SPI.


- Le processeur se branche vers la routine SPI et
l'éxécute ,cette rroutine doit étre à l'adress
0x0004.
- Le SPI se termine par l'instruction de retour,
l'exécution de cette instruction consiste à remettre à 1
le bit GIE puis à récupérer et mètre dans le PC
l'adresse de retour.
- Le processeur reprend l'exécution suspendue.
- On peut schématiser les interruptions sur les PIC par
l'organigramme suivant :
Instruction
quelleconque
Sauvegarder
l'événement
Evénement déclencheur

Instruction xxx
(1/2cycle)


Détecter quel
événement
est
survenu
Organigramme
principal
Sous programme
d'interruption

Programme
principal
Sous programme
d'interruption

Traiter l'événement

Restaurer
l'événement

Return

Instruction suivante

Suite de Programme
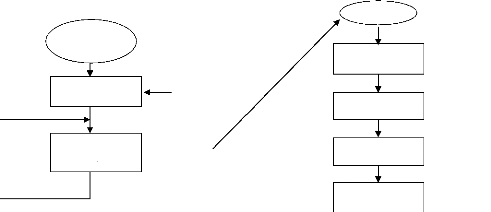
Événement
Implémentation d'une fonction sous interruption
:
SPI
Autorisation D'interruption
Sous programme
d'interruption
Programme
principal
Initialisation
principale
Boucle principale
BP
Sauvegarde
contexte
RAZ flag
Traitement
Restitution contexte
Return


Cas de plusieurs sources d'interruption:
Restitution contexte


Return
RAZ flag
RAZ flag

SPI
Sauvegarde
contexte

FLAG=1


FLAG=1
Traitement 1
Traitement 1
Figure I.24 : Schéma interne des
interruptions

rtie Pratiq
|
|
Applications du PIC 16F8
|
|
|
:
Présentation de la Carte
EASYPI
Ce starter-kit "EASYPI" est spécialement conçu
pour supporter les microcontrôleurs 18, 28 et 40 broches de la famille
PIC 16F87x. Une nouvelle version existe avec
programmateur USB intégré.
Le starter-kit "EASYPIC " permet ainsi de tester,
d'étudier et de communiquer avec la plupart des
périphériques qui peuvent être rencontrer dans les
applications industrielles:
· Afficheurs LCD ou 7 segments.
· Claviers de saisie.
· Affichage par Led.
· communication série.
· Mesure et contrôle de température.
· Conversion analogique / numérique.
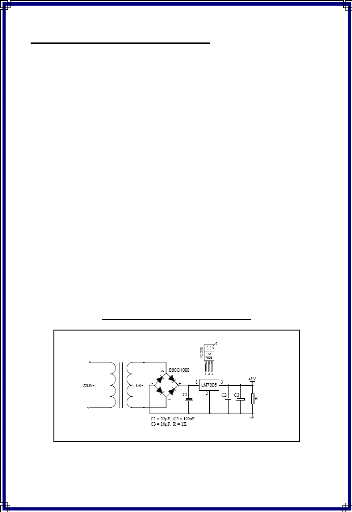
L'alimentation externe du PIC :
Il est exigé pour tous les éléments dans
le système de développement d'avoir +5V stabilisé. Le
système EasyPI utilise le régulateur de tension LM7805. En outre,
l'alimentation d'énergie d'USB peut être utilisée qui
permet à EasyPI de fonctionner sans alimentation d'énergie
externe.
Figure II.1 : Schéma interne de
l'alimentation
38
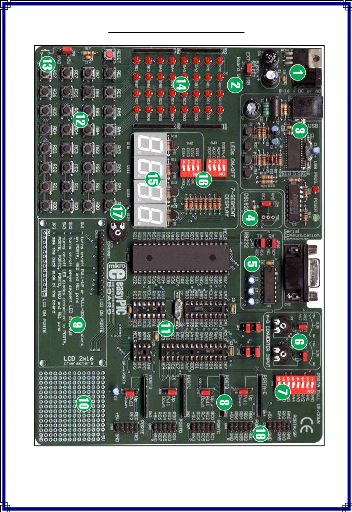
Figure II.2 : Photo de la carte EASY
PI

Dans la partie pratique on a étudié les
différentes interfaces du pic 1 6F877 telle que : le port
parallèle, le port série, le convertisseur ...
Dans chaque interface on a cité plusieurs exemples
d'applications avec leurs schémas et leurs organigrammes.
Mais par manque de temps on n'a pas pu utiliser d'autres
interfaces telles que le port parallèle slave, Module MSSP, I2C, Module
de comparaison CCP1 et CCP2....
La directive CONFIG :
Cette directive contient les fameux « fusibles » qui
fixent le fonctionnement du PIC. Les valeurs écrites seront
intégrées dans le fichier « .hex » pour signaler au
programmateur les valeurs à encoder aux adresses spécifiques du
PIC.
Cette directive est programmée lors de la programmation du
PIC dans un registre
spécial, situé en mémoire programme à
l'adresse 0x2007, et ne peut plus être modifié en cours
d'exécution du programme.
Cette directive est un registre de 14 bits dont chaque bit a une
fonction précise :
- CP1/CP0 : bits 13/12 - 5/4 : Détermine
quelle zone du PIC sera protégée contre la lecture. -
DEBUG : bit 11 : Debuggage sur circuit. Permet de réserver RB7
et RB6 à la
communication avec un debugger.
- Bit 10 : non implémenté.
- WRT : bit 9 : Autorisation d'écriture
en flash.
- CPD : bit 8 : Protection en lecture de la
mémoire eeprom.
- LVP : bit 7 : Utilisation de la pin RB3/PGM
comme broche de programmation.
- BODE N : bit 6 : provoque le reset du PIC en
cas de chute de tension (surveillance de la tension d'alimentation).
- PWRTE : bit 3 : Délai de
démarrage à la mise en service. Attention, est automatiquement
mis en service si le bit BODEN est positionné.
- WDTE : bit 2 : Watchdog timer.
- FOSC1/FOSC0 : bits 1/0 : sélection du
type d'oscillateur.
Dans nos application on utilisés la configuration
suivante : pragma config | = 0x 3a71,
C'est-à-dire: CP1/CP0= OFF, WDT= OFF, PWRTE=ON,
BODEN= ON, LVP= OFF, CPD=OFF, WRT=OFF, DEBUD= OFF, FOSC1/FO=XT.
Les valeurs données sont définies dans le fichier 1
6f877.inc qui représente les équivalences pour le PIC.
| 