N° d'ordre :06/2007-M/EL
République Algérienne Démocratique
et Populaire
Ministère de l'Enseignement Supérieur et de la
Recherche Scientifique
Université des Sciences et Technologies Houari
Boumediene
FACULTE D'ELECTRONIQUE ET D'INFORMATIQUE

MEMOIRE
Présenté pour l'obtention du
diplôme de MAGISTER
EN : ELECTRONIQUE
Spécialité :
Contrôle de Processus et Robotique
Par
Melle AKLI Isma
Thème
Elaboration d'une stratégie de coordination
de
mouvements pour un manipulateur
mobile
redondant


Soutenu publiquement le : 14 / 07 / 2007, devant la commission
d'examen :
R. TOUMI Professeur à l'U.S.T.H.B. Président
N. ACHOUR Maître de conférences à
l'U.S.T.H.B. Directrice de thèse
F. BOUJEMAA Professeur à l'E.N.P. Examinateur
M. HAMERLAIN Directeur de recherche au C.D.T.A Examinateur
F. FERGUENE Chargé de cours à l'U.S.T.H.B
Invité
Remerciements
Mes vifs remerciements vont :
A monsieur Toumi, qui nous a éclairé de toutes
ses connaissances pendant toute la durée de notre formation, et il nous
fait l'honneur de présider notre jury.
A madame Achour, qui nous a suivi tout au long de
l'élaboration de notre mémoire, et nous a permis de profiter de
ses précieux conseils.
A messieurs Boujemaa et Hamerlain, qui nous ont fait l'honneur de
juger notre travail, en ayant accepté de faire partie de notre jury.
A monsieur Ferguene, que nous avons côtoyé
pendant toute la durée de notre étude, ce qui nous a permis
d'apprécier ses qualités tant humaines que
pédagogiques.
A tout ceux qui, de prés ou de loin nous ont permis de par
leurs encouragements d'arriver à finaliser ce travail.
A toute ma famille
Avec toute mon affection
Pour tout l'amour qu'ils m'on
prodigué
Sommaire
Introduction Générale 1
Chapitre I : Généralités sur les
robots mobiles et les bras manipulateurs
I.1. Introduction 3
I.2.Définitions Générales 3
I.2.1. Définition d'un robot 3
I.2.2. Contrôle 4
I.2.3. Actionneurs 4
I.2.4. Effecteurs 4
I.2.5. Capteurs 5
I.3. Robot mobile 5
I.3.1. Types de roues 5
I.3.2. Holonomie 7
I.3.3. Types de plateformes mobiles à roues 7
I.3.3.1. Plateformes différentielles (unicycle) 7
I.3.3.2. Plateformes omnidirectionnelles 8
I.3.3.3. Plateformes de type voiture 8
I.3.4. Capteurs propres aux robots mobiles 9
I.3.4.1 Capteurs proprioceptifs 9
I.3.4.2 Capteurs extéroceptifs 9
I.4. Robot manipulateur 10
I.4.1. Types d'articulations (liaisons) 10
I.4.1.1. Articulation rotoîde 10
I.4.1.2. Articulation prismatique 11
I.4.2. Espace de travail 11
I.4.3. Degrés de liberté 12
I.4.4. Capteurs relatifs aux bras manipulateurs 12
I.4.4.1. Capteurs Proprioceptifs 12
I.4.4.2. Capteurs extéroceptifs 13
I.5. Autonomie et Téléopération 15
I.5.1. Systèmes autonomes 15
I.5.2. Systèmes téléopérés
15
I.6.Conclusion 16
Chapitre II : Synthèse des travaux relatifs
à la manipulation mobile
II.1 .Introduction 17
II.2.Caractéristiques des manipulateurs mobiles 17
II.2.1.Capteurs utilisés et leurs positions 17
II.2.2.Redondance et holonomie 18
II.2.3.Position du bras sur la plateforme 19
II.2.4.Nombre et position des roues motrices 21
II.2.5.Taille du robot 21
II.2.6.Mode de Manipulation 23
II.3.Domaines d'applications 24
II.3.1.Domaine spatial 24
II.3 .2.Agriculture 24
II.3.3.domaine médical 25
II.3.4.domaine manufacturier 26
II.3.5.Les humanoïdes 26
II.4. Conclusion. 27
Chapitre III : Notions fondamentales pour la
modélisation des manipulateurs mobiles
III.1 .Introduction 29
III.2.Notions de coordonnées 29
III.2.1. Coordonnées opérationnelles 29
III.2.1.1. Organe terminal 29
III.2.1.2. Définition des coordonnées
opérationnelles 29
III.2.1.3. Vitesses et accélérations
opérationnelles 30
III.2.2. Notions de coordonnées
généralisées 31
III.2.2.1. Notion de liaisons 31
III.2.2.2.Types de liaisons 31
III.2.2.3.Holonomie 32
III.2.2.4.Définition des coordonnées
généralisées 32
III.2.2.5 .Déscription des vitesses et
accélérations généralisées 33
III.3.Notions d'espaces 34
III.3.1 .Espace opérationnel 34
III.3.2.Définition de l'Espace des Configurations 34
III. 4.Notions de tâches 34
III.4.1. Définition d'une tâche
généralisée 35
III.4.2. Définition d'une tâche
opérationnelle 35
III.4.3. Types de Tâches 35
III.4.3.1. Tâche Généralisée Point
à Point TGPP 35
III.4.3.2. Tâche Opérationnelle Point à Point
TOPP 35
III.4.3.3. Tâche à Trajectoire Opérationnelle
Imposée TTOI 36
III.4.3.4. Tâche à Mouvement Opérationnel
Imposé TMOI 36
III.5.Notions de modèles de transformation d'espaces
36
III.5.1.Modèle Géométrique Direct 36
III.5 .2.Modèle géométrique Inverse 36
III.5.3 .Modèle Cinématique Direct 37
III.5 .4.Modèle Cinématique Inverse 37
III.6.Types de Configurations 38
III.6.1 .Notion de degrés de mobilité du
système 38
III.6.2.Degrés de Libertés 38
III.6.3 .Configurations Singulière et
régulière 38
III.7.Notions de redondances 39
III.7.1. Notions de redondance géométrique 39
III.7.2.Notions de redondance cinématique 40
III.8.Contraintes de Roulement Sans Glissement 40
III.9. Etudes de différents systèmes 41
III.9.1. Paramétrisation d'un bras manipulateur de type
série 42
III.9.2. Paramétrisation des plateformes à roues
44
III.9.3. Etude d'un manipulateur mobile à roues 49
III.10. Conclusion 54
Chapitre IV : Modélisation
IV. 1. Introduction 55
IV.2.Présentation du système à
étudier 56
IV.3.Modèle géométrique direct 57
IV.3.1. Matrices de passage 57
IV.3.2. Calcul Direct 59
IV.4. Modèle géométrique inverse 61
IV.4. 1. Planification de mouvement de la plateforme mobile
62
IV.4. 1.1. Définition de la Trajectoire
Opérationnelle Imposée 63
IV.4. 1.2. Génération de trajectoire de la
plateforme 63
IV.4.1.3. Planification de trajectoire 65
IV.4. 1.4. Planification du mouvement de la plateforme 66
IV.4.2. Inversion du modèle du bras manipulateur 67
IV.4.2. 1. Méthodes de calcul du modèle
géométrique inverse 68
IV.5. Modèle cinématique direct 71
IV.5.1. Représentation générale du
modèle cinématique direct 71
IV.5.2. Présentation du modèle cinématique
réduit 73
IV.5.2. 1. Plateforme différentielle 74
IV.5.2.2. Plateforme de type voiture 74
IV. 5.3. Modèle cinématique direct réduit du
système à étudier 75
IV.6. Modèle cinématique inverse 75
IV.6.1. Méthode des Tâches additionnelles 77
IV.7.Conclusion 80
Chapitre V : Simulations et Résultats
V. 1. Introduction 82
V. 2. Implémentations 82
V.2. 1 .Environnement de programmation 82
V.2.2.Affichage des résultats 83
V.2.3.Principaux objets utilisés 83
V.3.Validation des modèles inverses 83
V.4.Trajectoires Opérationnelles imposées 84
V.4. 1. Trajectoire Carrée 84
V.4.2. Trajectoire Ellipsoïdale 84
V.4. 3. Trajectoire Circulaire 85
V.5. Représentation des champs 85
V.6. Modèle géométrique inverse 86
V.6. 1 .Délplacements du manipulateur mobile 86
V.6.2.Planification de trajectoire 87
V.6.3. Représentation de la trajectoire et du mouvement de
la plateforme 88
V.6.4. Choix du type de planification de trajectoire de la
plateforme 89
V.6. 5. Modification des paramètres pour la planification
de trajectoire 94
V.6.5.1. Influence de la longueur des rayons des champs de
référence 94
V.6.5.2.Influence de la distance entre échantillons de
référence Dist 97
V.6.5.3. Modification de la position initiale de la plateforme
102
V.7.Modéle Cinématique Inverse 104
V.7. 1 .Choix numéro 1 105
V.7.2.Choix numéro 2 106
V.7.1.Choix numéro 3 106
V. 8.Conclusion 108
Conclusion Générale 109
Annexe A : Modèle géométrique Direct
du système articulé 111
A. 1. Calcul du modèle géométrique direct
d'un bras manipulateur 111
A.2. Forme analytique du modèle géométrique
direct du bras Mitsubishi PA17CE 114
A.2.1. Matrices de passage des différents repères
du bras Mitsubishi PA10
7CE 113
A.2.2. Matrice de transformation d'espace globale 113
Annexe B : Modèle Cinématique Direct du
système articulé 115
B. 1 .Présentation de la matrice jacobienne d'un bras
manipulateur 115
B.2. Formation de la matrice jacobienne 116
B.2. 1. Calcul de la matrice jacobienne vectorielle Jn
116
B.2.2.construction des colonnes de la matrice jacobienne Jb
118
B.2.3. Forme analytique des vitesses opérationnelles
linéaires du bras
Mitsubishi PA10 7CE 118
Annexe C : Caractéristiques des
éléments des manipulateurs mobiles 120
C. 1 .Caractéristiques du bras manipulateur 120
C.2.Caractéristiques de la plateforme mobile 121
Références Bibliographiques 122
Introduction Générale
., d'une part, pour éviter aux êtres humains des
tâches répétitives, et d'autre part, pour améliorer
la productivité [Poi96]. Nous pouvons distinguer deux types de
robots:
-Les bras manipulateurs -Les robots mobiles
Historiquement, les bras manipulateurs ont été
les premiers à avoir vu le jour; ils ont représenté
pendant longtemps un mécanisme articulé de grande taille,
fixé sur un socle rigide, et assurant des tâches précises,
selon des ordres donnés; le but de leurs utilisation était
d'affranchir l'être humain de tâches lassantes et monotones, ils
évoluaient dans des milieux industriels où l'environnement est
structuré; de ce fait, leur utilisation dans ce cadre s'est
progressivement banalisée, puisqu'ils sont limités par leurs
dimensions, ainsi que leur morphologie, ne leur permettant d'opérer que
dans des espaces réduits, révélant leur incapacité
à effectuer correctement des tâches dans des
périmètres importants comparés à leurs taille. Les
domaines d'applications dans la robotique s'étant étendus, et
pour palier aux défauts des bras manipulateurs, il a fallu construire
d'autres systèmes, capables d'évoluer dans de plus grands
espaces. C'est la raison pour laquelle il y a eu l'apparition des plateformes
mobiles pour combler les lacunes des bras manipulateurs, puisqu'ils peuvent
évoluer dans de grands espaces. Ce sont des dispositifs qui sont
généralement constitués d'un véhicule semblable
à un chariot motorisé, ils peuvent être dotés de
divers outils de locomotion. On peut citer les mobiles à roues, les
mobiles à chenilles, les mobiles marcheurs ou encore les robots
rampants. Les plateformes mobiles ont été utilisées pour
transporter des charges en milieux industriels, ou dotées de divers
outils pour une plus vaste utilisation (nettoyage, exploration ou
surveillance,... etc.). L'inconvénient majeur que présentent ces
mécanismes est leur incapacité à interagir avec
l'environnement pour modifier sa structure. Le progrès et
l'évolution ont fait diversifier les domaines d'applications, les
chercheurs ont dû être confrontés à des situations
où la locomotion et la manipulation se devaient d'être
combinées, pour effectuer des tâches bien précises, ce qui
a donné naissance aux manipulateurs mobiles. Classiquement, ce sont des
plateformes mobiles portant un bras manipulateur; l'alliance de la locomotion
et de la manipulation ouvre de nouveaux horizons dans le domaine de la
recherche, puisque ces systèmes mécaniques ont été
sujets à de récentes études [Bay01]. Comme le bras est
doté de la capacité de manipulation, il peut interagir avec
l'environnement dans des espaces relativement importants, car, grâce
à la plateforme mobile, l'espace des positions accessibles du robot
manipulateur est plus important, d'où la possibilité de
franchissement d'obstacles, et même, de les déplacer quand il y a
possibilité de le faire.
Présentation d'un système de manipulation
mobile
Comme tout système robotique, les déplacements
d'un manipulateur mobile doivent être régis par un certain nombre
de lois représentatives de son évolution spatiale et temporelle.
Ces règles se présentent sous forme de modèles
mathématiques appelés modèles géométrique et
cinématique, modèles qui peuvent être utilisés dans
le cadre d'une planification de trajectoire et de mouvement, qui sont
étroitement liés à la morphologie d'un bras manipulateur
ayant une base figée non déplaçable. Or, l'adjonction de
la plateforme mobile présente un problème pour leur mise en
oeuvre, puisque l'évolution spatiale des systèmes combinés
se fait dans un environnement ayant un volume important, et l'extrapolation sur
les déplacements du système de manipulation mobile sera moins
certaine.
Notre travail consistera précisément à
mettre en oeuvre une stratégie de planification de trajectoire et de
mouvement pour un manipulateur mobile, comportant un bras manipulateur
redondant et une plateforme mobile de type voiture. Nous nous baserons sur la
constitution des différents modèles, dans le cadre de
l'accomplissement d'une tâche particulière.
Notre mémoire se subdivisera donc en cinq parties :
nous exposerons dans la première partie les différentes
caractéristiques propres à chacun des sous-système bras
manipulateur et plateforme mobile composant le manipulateur mobile, ensuite,
nous présenterons les différents travaux existants traitant de
l'étude des systèmes de manipulation mobile, puis, nous
définirons des notions fondamentales liées aux systèmes
articulés embarqués. La quatrième partie sera
consacrée à la présentation du fond du travail que nous
devons implémenter, et dans laquelle nous allons expliciter les
différentes approches que nous avons adopté pour
l'élaboration de la stratégie de planification de trajectoire et
de mouvement. Enfin, une dernière partie sera consacrée à
la mise en pratique des notions théoriques présentées dans
les parties précédentes.
Nous clôturerons ce mémoire par une conclusion, dans
laquelle nous présenterons des suggestions, dans un but
d'amélioration du travail considéré.
|
|
Chapitre I
|
|
Généralités sur les
robots
|
|
mobiles et les bras
|
|
manipulateurs
|
|
|
I.1. Introduction
Les manipulateurs mobiles sont constitués d'un ou
plusieurs bras manipulateurs embarqués sur un robot assurant la
mobilité. Pour notre part, nous nous sommes intéressés au
cas où il n' y a qu'un seul bras manipulateur embarqué sur une
plateforme mobile à roues. La spécificité de ce type de
systèmes est le fait que les bras ont des caractéristiques
particulières, relativement à leurs composantes mécaniques
et électroniques. Il en est de même pour les robots mobiles qui se
distinguent par leurs propres éléments. De ce fait, nous avons
trouvé nécessaire de décrire les deux sous
systèmes, sachant que ce sont ceux qui ont suscité le plus
l'intérêt de la recherche dans le domaine de la robotique. Il
existe donc un certain nombre de notions auxquels nous devons faire allusion ;
c'est pour cela que nous avons trouvé obligatoire de les définir,
afin de les évoquer par la suite en ayant une connaissance a priori de
leurs significations.
Ce chapitre a pour but de donner des notions essentielles sur
notre système, pour faciliter la compréhension de certains
critères. Une première partie sera consacrée à des
définitions générales liées à la robotique.
Vu que notre robot comporte le sous systèmes véhicule à
roue, nous passerons alors en revue certaines notions liées à la
robotique mobile, à savoir les roue variées utilisées pour
ce genre de systèmes, et les types de véhicules mobiles les plus
courants, et aussi, les divers capteurs utiles à la navigation. Nous
consacrerons une troisième partie aux bras manipulateurs, qui seront
décrits relativement à leurs constituants articulaires. Nous
exposerons ensuite les types de morphologies qu'ils peuvent présenter,
puis, nous définirons les divers capteurs utilisés pour ces
robots. Enfin, un dernier volet traitera de l'autonomie des systèmes
robotiques, puisque c'est un aspect qui touche au domaine de la manipulation
mobile.
Nous allons dans ce qui suit donner des définitions
générales liées à la robotique.
I.2. Définitions
Générales
I.2.1. Définition d'un robot
La définition générique stipule qu'un
Robot est une machine physique qui modifie matériellement son
environnement pour atteindre le but qui lui est fixé : la tâche
désirée [Dom01], ou encore, c'est un manipulateur commandé
en position, reprogrammable, polyvalent, capable de manipuler des
matériaux, des pièces, des outils ou des dispositifs
spécialisés [Khl99]. Cette définition s'attache de trop
prés aux systèmes articulés. Il existe une autre
définition plus générale qui considère un robot
comme un «agent» artificiel, actif et autonome, ayant comme
environnement l'espace physique.
Un agent est une entité équipée de la
capacité de perception, saisissant son entourage grâce à
des capteurs, prenant des décisions à l'aide du
contrôleur, et enfin agissant en conséquence en usant des
effecteurs ; il peut donc s'adapter seul aux variations de son
environnement, de telle sorte que la tâche soit
correctement exécutée en dépit de ces variations ; il doit
comprendre un «corps» et un «cerveau».
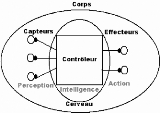
Fig.I.1 : Représentation schématique d'un
agent
Les actionneurs et effecteurs sont les organes
du robot qui animent la structure mécanique ; la maîtrise de leurs
commandes permet de faire réaliser des tâches
prédéfinies par l'opérateur. Nous allons dans ce qui suit
donner certaines définitions fondamentales.
I.2.2. Contrôle
C'est une opération qui consiste à asservir les
variables relatives au mouvement (qu'on notera x) à des valeurs
désirées (notées xd) ; par ce moyen, il est fait
en sorte que la valeur x soit commandée à partir de la
valeur désirée [Vib87] et que l'on ait en fin de compte
x=xd. En d'autres termes, le contrôleur
récupère l'information sensorielle (par des capteurs), prend des
décisions intelligentes par rapport aux actes à accomplir, et
effectue ces opérations en envoyant les commandes adéquates aux
actionneurs.
I.2.3. Actionneurs
Ce sont des mécanismes qui permettent à /aux
effecteur(s) d'exécuter une action, de convertir les commandes
logicielles (Software) en des mouvements physiques ; leur but primaire est de
produire assez de force pour provoquer le mouvement du robot, celle ci
représente la transformation d'une énergie source en
énergie mécanique[Khl99]. La technologie des actionneurs est
étroitement liée à l'énergie de base
utilisée (pneumatique, hydraulique, électrique) [Pru88].
I.2.4. Effecteurs
Ce sont tous les mécanismes à travers lesquels le
robot peut effectuer des changements propres à lui, ou relatifs à
l'environnement ; ces changements se font grâce aux actionneurs.
I.2.5. Capteurs
Ce sont des outils de perception qui permettent de
gérer les relations entre le robot et son environnement. Il existe deux
types de capteurs tels que : les capteurs proprioceptifs qui mesurent
l'état mécanique interne du robot (comme les capteurs de
position, de vitesse ou d'accélération), et les capteurs
extéroceptifs qui recueillent des informations sur l'environnement
(comme la détection de présence, mesure de distance... etc). Les
capteurs ont comme fonction de lire les variables relativement au mouvement du
robot pour permettre un contrôle convenable [Khl99].
Après avoir exposé les différentes
définitions relatives aux robots en général, nous allons
dans ce qui suit nous intéresser spécialement aux deux parties
composant des manipulateurs mobiles, à savoir, les structures
articulées (bras manipulateurs), et les plateformes mobiles.
I.3. Robot mobile
De manière générale, on regroupe sous
l'appellation robots mobiles l'ensemble des robots à base
mobile (Fig.I.2).
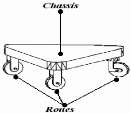
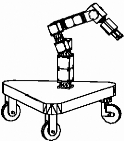
Fig.I.2 : Représentation d'un robot
mobile
Ces machines sont constituées d'un châssis, et
d'un ensemble de roues, ayant comme fonction la stabilité et la
mobilité du système (nous n'allons nous intéresser qu'aux
robots mobiles à roues, en faisant abstraction des autres types de
plateformes, comme les robots marcheurs, ou rampants).
La particularité de ces robots est leur capacité
à se mouvoir dans des environnements relativement grands (sans influer
sur leur constitution), grâce à leur système de locomotion,
c'est pour cela que nous allons dans ce qui suit évoquer les
différents types de roues utilisées en robotique mobile.
I.3.1. Types de roues
Pour une base mobile, le type de roues assurant sa locomotion a
son importance, dans le cadre de l'étude de son mouvement. Nous allons
donner une description de ces dispositifs qui
représentent la partie la plus importante, puisqu c'est
leur actionnement qui doit être commandé et contrôlé.
Les différents types de roues sont (Fig.I.3) :
(a).Roues fixes : Ont comme particularité un axe de
rotation parallèle au sol, et qui passe par le centre de la roue.
(b).Roues centrées orientables : l'axe d'orientation est
perpendiculaire au sol, il passe par le centre de la roue.
(c).Roues décentrées orientables : l'axe
d'orientation est perpendiculaire au sol, il ne passe pas par le centre de la
roue, ce type de roues est appelé aussi roues folles. Ce sont des roues
dont la direction peut varier librement selon un axe vertical. Elles
présentent l'avantage de donner au robot la possibilité de
tourner à droite ou à gauche sans « mécanique
compliquée », ou encor de simplifier la commande de la «
droite » ou de la « gauche » en jouant uniquement sur les roues
motrices arrière.
(d).Roues suédoises : pour lesquelles la composante
nulle de la vitesse de glissement, au point de contact (notions définie
dans Chapitre III, Paragraphe III.8), n'est pas dans le plan de la roue.

(a) (b) (c) (d)
Fig.I.3 : Différents types de roues en robotique
mobile : (a)Roue fixe, (b) Roue centrée orientable,
(c) Roue
décentrée orientable, (d) Roue suédoise
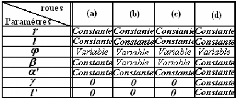
Tab.I.1 : Propriétés des
paramètres de description des roues en fonction de leurs
type
Le tableau Tab.I. 1 représente les paramètres
relatifs aux différentes roues présentées en Fig.I.4.
? représente le vecteur de rotation propre de la roue
considérée, â décrit son orientation,
r est son rayon, á` définit l'orientation de
l'axe de la roue relativement à un repère lié à la
plateforme, et enfin, l indique la distance entre le centre
d'orientation de la roue et le point référentiel
Op du chariot. Les paramètres ã et
l, sont des données qui concernent les roues
suédoises.

(a) (b)
Fig.I.4 : Description des paramètres relatifs
aux différentes roues
(a) Paramétrage pour les roues
décentrées et orientables
(b) Paramétrage pour les
roues fixes, centrées orientables et suédoises
Les roues présentées ci-dessus en Fig.I.3
[Pad05] [Bay01] influent sur le mouvement d'une plateforme mobile de part la
variabilité des paramètres qui les représentent (Fig.I.4).
Leur évocation nous ramène à l'aspect holonomie, cette
caractéristique va être explicitée dans ce qui suit.
I.3.2. Holonomie
Un système mobile holonome peut se déplacer dans
toutes les directions depuis sa position courante. La contrainte non holonome
est la limitation des vitesses admissibles d'un objet, ce qui veut dire que le
robot non holonome ne peut effectuer de mouvement instantanément que
dans certaines directions. Cette notion sera plus approfondie dans le chapitre
III.
Nous allons dans ce qui suit présenter les
différentes plateformes mobiles existantes, en évoquant
précisément l'aspect holonomie.
I.3.3. Types de plateformes mobiles à roues
Nous présentons ici les différents types de bases
mobiles utilisées en robotique I.3.3.1. Plateformes
différentielles (unicycle)
Ce type de robot comporte deux roues commandées
indépendamment. Une ou plusieurs roues folles sont ajoutées
à l'avant ou à l'arrière du robot pour assurer sa
stabilité (Fig.I.5). Cette plateforme est très simple à
commander, puisqu'il suffit de spécifier les vitesses des deux roues
[Fil05].

(a) (b)
Fig.I.5 : Plateforme différentielle (a)Vue de
profil, (b)Vue de dessus
L'estimation du déplacement par odomètrie (voir
capteurs paragraphe I.3.4) est également très simple, à
partir de la mesure des vitesses de rotation des deux roues
?&1 et ?&2.
Ce type de plateforme peut aussi être utilisé
avec des chenilles, ce qui fournit une capacité de franchissement de
petits obstacles intéressante (Fig.I.6). Ces plateformes peuvent ainsi
être utilisées en milieu urbain, ou dans des décombres.

Fig.I.6 : Plateforme de type chenille
I.3.3.2. Plateformes omnidirectionnelles
Les plateformes omnidirectionnelles permettent de
découpler de manière plus nette le contrôle de la rotation,
et de la translation d'un robot ; cet aspect induit que ce type de
systèmes est réellement holonome [Fil05].
Ces robots mobiles utilisent pour cela trois ou quatre roues
qui tournent à la même vitesse, pour fournir une translation, et
un mécanisme qui permet d'orienter simultanément ces roues, dans
la direction du déplacement souhaitée (Fig.I.7).

(a) (b)
Fig.I.7 : Plateforme omnidirectionnelle : (a) Vue de
profil, (b) Vue de dessus
Le corps du robot lui-même n'effectue pas de rotation,
mais uniquement des translations. Ce système permet un contrôle
très simple et relativement rapide, car les changements de direction ne
concernent que les roues, et peuvent donc se faire très vite ; par
contre, ces plateformes sont relativement limitées en capacité de
franchissement, et requièrent un sol très plan.
I.3.3.3. Plateformes de type voiture
Des plateformes non holonomes, de type voiture, sont
également utilisées en robotique mobile. Ces véhicules
sont toutefois plus difficiles à commander, car elles ne peuvent pas
tourner sur place et doivent manoeuvrer [Fil05], ce qui peut être
difficile dans des environnements encombrés. La commande de ces
plateformes (pour réaliser un déplacement particulier) est un
problème à part entière.

(a) (b)
Fig.I.8 : Plateforme non holonome, (a) Vue de Profil,
(b) Vue de dessus
I.3.4. Capteurs propres aux robots mobiles
Nous allons dans ce qui suit évoquer un certains nombre de
capteurs relatifs à la robotique mobile, utiles à la navigation,
ils peuvent être proprioceptifs ou extéroceptifs.
I.3.4.1. Capteurs proprioceptifs
> L'odométrie qui permet d'estimer le
déplacement à partir de la mesure de rotation des roues.
> Le radar doppler (petit radar pointé vers le sol) qui
permet de mesurer la vitesse du véhicule par effet doppler.
> Le gyromètre qui sert à mesurer l'orientation
du corps sur lequel il est placé, ceci par rapport un
référentiel fixe et selon un ou deux axes.
I.3.4.2. Capteurs extéroceptifs
> Les télémètres qui permettent de
mesurer la distance à l'environnement ; ils sont [Fil05]:
· à ultrasons, utilisant la mesure du temps de
retour d'une onde sonore réfléchie par les obstacles pour estimer
la distance.
· à infrarouge, constitué d'un ensemble
émetteur/récepteur utilisant des radiations invisibles pour la
détection d'obstacles.
· Laser, utilisant un faisceau laser et mesurant le temps
de vol d'une impulsion émise par une diode laser à faible
puissance.
> Les balises dont on connaît la position, et qui
pourraient être détectées par le robot, afin de faciliter
sa localisation.
> Le GPS (Global Positionning System) qui a comme principe
d'avoir placé des balises sur des satellites en orbite terrestre, et qui
est par conséquent accessible de quasiment partout de la surface du
globe.
Nous avons dans ce paragraphe largement décrit les
plateformes mobiles à roues par rapport à leurs
caractéristiques propres. Nous allons dans ce qui suit évoquer
les particularités de l'autre type de robots, à savoir les bras
manipulateurs, puisqu'ils représentent la seconde partie composant les
manipulateurs mobiles.
I.4. Robot manipulateur
Nous n'allons considérer que les robots manipulateurs
ayant une structure ouverte simple (en omettant d'étudier les structures
fermées, arborescentes ou parallèles), car c'est ce type de bras
qui sera utilisé de notre manipulateur mobile.
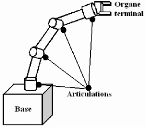
Fig.I.9 : Représentation d'un bras
manipulateur
Un bras manipulateur est un système
électromécanique capable d'interagir avec son environnement. Il
est constitué de deux parties distinctes [Khl99]:
o Un organe terminal : c'est
un dispositif d'interaction fixé à l'extrémité
mobile de la structure mécanique, il regroupe les procédés
destinés à manipuler des objets, ou à les transformer, il
s'agit donc d'une interface permettant au robot d'interagir avec son
environnement.
o Une structure mécanique articulée
: C'est une chaîne cinématique, à corps
généralement rigides (segments), assemblés par des
liaisons (articulations).
Les articulations sont des dispositifs se trouvant entre deux
segments. Ils lient deux corps successifs ; cette disposition permet le
mouvement entre ces corps, ce qui a comme conséquence l'obtention d'un
mouvement relatif des segments voisins. Cette structure articulée
supporte l'organe terminal à situer, son rôle est de l'amener
à une position et une orientation donnée.
I.4.1. Types d'articulations (liaisons) I.4.1.1.
Articulation rotoîde
C'est une articulation de type pivot, ayant comme principe la
réduction du mouvement entre deux corps à une rotation autour
d'un axe qui leurs est commun, ce qui donne comme résultante un angle de
rotation autour de cet axe.

I.4.1.2. Articulation prismatique
C'est une articulation de type glissière,
réduisant le mouvement entre corps à une translation le long d'un
axe commun, ce qui signifie qu'il se produira un déplacement
linéaire mesuré par une distance le long de cet axe.
Rotation Translation
Segment1 Segment2 Segment1 Segment2
(a) (b)
Fig.I.10 : présentation des types de liaisons :
(a) liaison rotoîde (b) liaison prismatique
I.4.2. Espace de travail
Appelé aussi volume de travail, il représente
l'espace physique engendré par un point de l'organe terminal lorsque le
robot est en mouvement (évolution relative aux variables articulaires).
Il est habituellement représenté par deux sections
perpendiculaires choisies en fonction du type du robot manipulateur [Gor84].
Cette représentation est préférable à une seule vue
en perspective. Ce point pourrait être l'extrémité de
l'organe terminal.
Ce type de représentation ne renseigne que sur les
positions de l'organe terminal, mais omet le fait d'indiquer ses orientations,
qui ne peuvent paraître concrètement.

(a)
(b) (c)
Fig.I.16 : Exemple de représentation de l'espace
de travail : (a) bras industriel IRB 1400,
(b) vue de profil,
(c) vue de haut
Avant d'entamer la description des capteurs propres aux bras
manipulateurs, nous allons évoquer un aspect très important qui
est la notion de degrés de liberté.
I.4.3. Degrés de liberté
Le degré de liberté d'un robot manipulateur est
égal au nombre de paramètres indépendants qui fixent la
situation de l'organe terminal, il peut être fonction de la configuration
du robot[Gor84]. Cela sera illustré dans l'exemple suivant en
Fig.I.17:
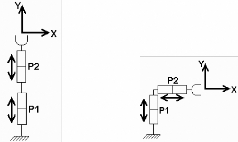
(a) (b)
Fig.1.17 : Exemple explicatif pour la définition
d'un degré de liberté : (a) bras à un degré de
liberté, (b) bras à deux degrés de
libertés
La figure Fig.I.17.a représente un bras comportant deux
liaison prismatiques, et pourtant, il est considéré comme ayant
un degré de liberté, puisque les deux liaisons font
déplacer l'organe terminal dans la direction de Y seulement ; par
contre, pour la Fig.I.17.b, le bras comporte aussi le même nombre
d'articulations, mais combinées différemment, ce qui lui permet
de faire bouger l'organe terminal dans le sens de X (grâce à
l'articulation P2) et de Y (grâce à l'articulation P1). Pour un
manipulateur mobile, un exemple concret est présenté en chapitre
III.
I.4.4. Capteurs relatifs aux bras manipulateurs
Les capteurs utilisés en manipulation sont assez
complexes à décrire car on doit faire appel à beaucoup de
notions en électricité et électronique ; c'est pour cela
que nous n'allons faire que les évoquer relativement à leurs
fonctions et nous abstenir de rentrer dans les détails.
I.4.4.1. Capteurs Proprioceptifs
Ces capteurs assurent un contrôle permanent du
système mécanique articulé. Ils interviennent dans les
boucles de régulation, afin de permettre à l'unité de
commande de suivre correctement, ou de modifier la trajectoire en cours, afin
qu'elle soit conforme à celle exigée par la tâche
[Pru88].
> Capteurs de position
Ce sont les capteurs qui servent à nous informer sur le
déplacement articulaire (linéaire pour les articulations
prismatiques ou angulaire pour les articulations rotoîdes), comme par
exemple, les capteurs potentiomètriques qui se basent
sur le déplacement angulaire ou linéaire d'un curseur, au niveau
d'un potentiomètre, pour définir la position courante de
l'actionneur. Chaque type d'articulation comprend ses propres types de
capteurs. Les déplacements linéaires ou angulaires se
détectent de façons différentes et distinctes.
La représentation suivante en Fig.I. 18 relate les
principaux capteurs de position pour les robots manipulateurs [Coi86].
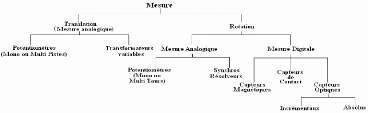
Fig.I.18: Les principaux capteurs de position
rencontrés sur les robots manipulateurs > Capteurs
de vitesse
Dans la majorité des cas, on essaie de se ramener
à la mesure d'une vitesse de rotation, car la mesure d'une vitesse de
translation nécessite des capteurs très spéciaux, peu
nombreux de toutes façons, et rarement utilisés.
> Capteurs d'accélération
Ces capteurs trouvent leurs applications dans la commande
dynamique des robots, dans le cas par exemple de désir
d'exécution de tâches à grandes vitesses.
I.4.4.2. Capteurs extéroceptifs
Les capteurs extéroceptifs sont décrits par leur
fonction plutôt que par les grandeurs qu'ils mesurent ; nous pouvons les
subdiviser en trois types tels que :
> Capteurs de contact
Ce sont des capteurs qui exigent un contact avec l'objet sur
lequel il va y avoir la mesure, leurs fonctions peuvent être diverses et
variées, comme illustré dans la figure suivante [Pru88]:
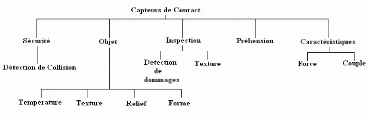
Fig.I.19 : Représentation des différentes
fonctions des capteurs à contact > Capteurs sans
contact
Ces capteurs prélèvent une information à
distance, le support de cette information est un rayonnement. Ces capteurs
peuvent se distinguer en deux familles :
· Capteurs de proximétrie :
Ces capteurs représentent une sous-classe des capteurs
sans contact. Nous pouvons les comparer à des capteurs d'images
élémentaires fournissant trois types d'informations tels que:
-une information binaire sur la présence ou l'absence
d'un objet de proximité.
-une information quantifiant la proximité de quelques
millimètres à quelques mètres. -une information
liée à la forme d'un objet à proximité.
· Capteurs d'images (Vision numérique):
Ce type de capteurs aurait pu être évoqué
dans le paragraphe précèdent, car ce sont des capteurs communs
aux deux types de robots, ce qui fait que nous avons
préféré les englober dans cette section. Ces capteurs sont
souvent utilisés en asservissement visuel, ils ont comme fonction la
perception de l'environnement par vision, il en existe cependant certaines
catégories [Fil05]:
· Les caméras standards permettant une vision
traditionnelle.
· Les caméras stéréoscopiques qui
représentent deux caméras observant la même partie de
l'environnement à partir de deux points de vue différents, ce qui
permet d'avoir une sensation de profondeur.
· Les caméras panoramiques (catadioptriques) qui
mesurent la réflexion de l'environnement, grâce à une
caméra sur un miroir parabolique. L'image recueillie permet d'avoir une
vision de l'environnement sur 360 degrés autour de la camera.
Avant de clore ce chapitre, nous allons évoquer une
caractéristique très importante, concernant les robots en
général qui est l'autonomie.
I.5. Autonomie et Téléopération
Dans la définition du robot, nous avons eu à
évoquer l'autonomie qui constitue une caractéristique
particulière, mais cet aspect se trouve partiellement abandonné
relativement aux applications, qui ne se résument plus qu'à
l'aspect industriel. C'est pour cette raison que les nouvelles machines peuvent
ne pas être complètement autonomes, comme cela est expliqué
ci-dessous (Cette partie est inspirée d'un travail ayant
été fait dans un cadre médical, donc, les exemples
cités sont tous traits à ce domaine).
I.5.1. Systèmes autonomes
Un système autonome est un agent qui dispose librement
de soi, c'est à dire, qui n'est pas commandé
extérieurement ; guidé seulement par l'information sensorielle
(capteurs), et prenant une décision relativement à des
instructions définies au préalable.
En chirurgie par exemple, une application sur tissus mous ou
déformables (par un bras manipulateur) ne peut pas mettre en oeuvre des
systèmes autonomes car, cela implique des incertitudes et des
inhérences qui ne peuvent pas être complètement prises en
charge par ce type de systèmes [Gin03], c'est dans ce sens qu'il y a eu
l'apparition par la suite des systèmes
téléopérés.
I.5.2. Systèmes
téléopérés
Ces systèmes ont comme caractéristique le fait
que ça soit un être humain qui reste maître de
l'intervention, ils sont de structure maître/esclave, puisque la console
« maître » est pilotée par un opérateur humain et
la structure « esclave » est représentée par le
robot.
Dans le domaine médical, le chirurgien est
confortablement assis prés de la table d'opération, et manipule
les organes terminaux des bras articulés de la structure maître,
il regarde le moniteur vidéo, qui lui fournit les images de
l'intérieur du patient [Gin03].
Les mouvements qu'il effectue sont reproduits sur les bras
robotisés de la structure esclave, qui est installée autour de la
table d'opération. La commande en effort peut être utilisée
par l'opérateur. La figure Fig.I.20 relate les différents blocs
pour former un système téléopéré [Mic04]
[Otm00] .

Fig.I.20 : illustration de l'architecture
générale d'un système de
téléopération.
Dans le cas général, ces robots autorisent les
opérations à grande distance, où plusieurs milliers de
kilomètres séparent l'endroit où doivent se
dérouler les actions (faites par le robot) de l'opérateur.
I.6. Conclusion
Dans ce chapitre, Nous avons pu définir certaines
notions fondamentales liées à la robotique en
général, ensuite pour revenir au vif du sujet (manipulateurs
mobiles), nous nous somme consacré à la définition de
notions relatives aux robots mobiles pour une meilleurs compréhension de
ce type de systèmes, enfin, nous avons eu à relater les
particularités liées aux bras manipulateurs par rapport à
leurs constitutions.
Le manipulateur mobile qui nous devons étudier doit
être constitué d'une seule chaîne cinématique
ouverte, embarquée sur un système mobile à roues, le bras
utilisé à ces fins doit être assez léger pour
pouvoir être porté par la plateforme mobile. Aussi, cette
dernière doit présenter certaines qualités. C'est dans ce
sens que nous allons dans le chapitre suivant exposer une synthèse de
travaux étudiant les bras embarqués sur des véhicules
à roues, en évoquant des caractéristiques de ce type de
systèmes ; les différentes notions étudiées dans ce
chapitre vont alors nous être utiles par la suite, puisqu'il va y avoir
évocation d'aspects étroitement liés à la
mécanique des manipulateurs mobiles. Aussi, nous aurons à citer
des capteurs, et autres spécificités.
|
|
Chapitre II
|
|
Synthèse des travaux relatifs
|
|
à la manipulation mobile
|
|
|
Introduction
La modélisation des manipulateurs mobiles implique une
connaissance approfondie du système considéré,
relativement aux deux parties qu'il comporte (le bras manipulateur et la
plateforme mobile). Le choix d'un robot est donc une étape très
importante, qui doit se faire en amont pour qu'il puisse accomplir correctement
les actions exigées.
Nous avons rencontré dans notre recherche des robots ayant
des caractéristiques particulières, qui nous ont permis de les
classer, afin d'avoir une idée plus claire sur la question.
Nous allons dans ce chapitre répertorier les
différents critères caractérisant les manipulateurs
mobiles. Nous citerons un certain nombre de robots réels qui sont des
plates- formes expérimentales de certains laboratoires de recherches, et
des robots spécifiques à certains domaines d'applications
seulement ; le robot que nous allons utiliser comprend certaines
caractéristiques. C'est grâce à cette étude que nous
pourrons faire le choix de notre système articulé mobile.
Ce chapitre est subdivisé en deux parties, la
première consistera en une description de manipulateurs mobiles par
rapport à l'aspect technique, car nous allons surtout les
répertorier relativement à leurs composants propres, la seconde
partie sera consacrée à une classification de robots par rapport
à leurs utilisations.
II.1. Caractéristiques des manipulateurs
mobiles
Lors de notre recherche, nous avons pu constater un certain
nombre de caractéristiques relatives aux manipulateurs mobiles comme
:
II.2.1. Capteurs utilisés et leurs positions
Les types de capteurs utilisés et leurs positions
représentent un critère important dans le choix d'un manipulateur
mobile. Ainsi, le robot ANIS, développé à l'INRIA Sophia-
Antipolis en France sert de base de recherche aux travaux du projet ICARE
(Instrumentation, Commande et Architecture des Robots Evolués). Ce robot
représente un support expérimental à des études en
commande et navigation référencées capteurs, ainsi qu'en
perception active et fusion multi capteurs.
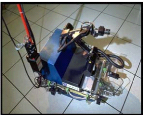
Fig.II.1 : Robot Anis
La partie mobile non holonome de type unicycle est
dotée de divers moyens sensoriels, comme le
télémètre laser rotatif qui se trouve à
l'arrière droit, ainsi qu'une ceinture de huit capteurs à
ultrasons se trouvant tout autour, lui permettant de se localiser et de se
déplacer dans des environnements d'intérieur, afin de les
explorer et d'en construire une représentation. Il est surmonté
d'un bras à 6 liaisons rotoïdes, comportant une camera au niveau de
l'organe terminal ; elle s'en trouve embarquée comme c'est
représenté en Fig.II. 1.
Ce robot est destiné à se déplacer dans un
environnement encombré, aussi, il a été conçu de
taille réduite ; il est relativement léger et maniable.
II.2.2. Redondance et holonomie
Comme nous l'avons précisé dans le chapitre I,
l'holonomie est une notion fréquemment utilisée pour les robots
mobiles afin d'exprimer l'aspect encombrement du véhicule ; par contre,
la redondance est un terme généralement employé pour
désigner la souplesse et la dextérité des bras
manipulateurs, c'est pour cela que ce sont des critères de
sélection majeurs auxquels nous nous somme intéressés ;
ces deux notions sont tout autant importantes, puisque les manipulateurs
mobiles ont la capacité de manipulation et de mobilité. Le robot
du The Robotic Laboratory Computer Science Departement (université de
Stanford aux USA) comporte une plateforme mobile holonome de type NOMADIC
XR4000, portant un bras manipulateur de type PUMA 560 à six liaisons
rotoïdes [Hol99]. Ce système a été employé
dans un projet de coopération multi robots au niveau du même
laboratoire, le projet en question ayant comme objectif la réalisation
de tâches en environnement intérieur. Chacun de ces robots est
doté de différents capteurs, un calculateur, un contrôleur
multiaxes, et une batterie comportant assez de puissance pour l'accomplissement
d'opérations autonomes [Kha96].
L'approche de collaboration de plusieurs robots a
été très souvent adoptée, comme au niveau de
l'université du Michigan aux USA dans le Robotics And Automation
Laboratory (Fig.II.2.a), où chaque bras est équipé de
capteurs d'effort (capteur de contact), ainsi qu'une pince. Les manipulateurs
mobiles sont dotés de cameras, d'un capteur laser, ou encore un
réseau Ethernet sans fil pour la communication (type de réseau
local rapide et très répandu).
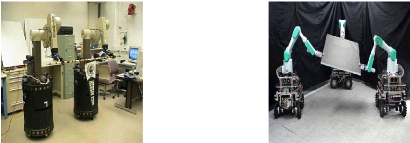
(a) (b)
Fig.II.2 : Robots coopérants : (a) manipulateurs
mobiles de Michigan,
(b) manipulateur mobile de l'université de
Tohoku
On a proposé au niveau du Korsuge et Wang laboratory de
l'université de Tohoku au Japon un algorithme de contrôle
décentralisé, pour la manipulation coordonnée d'un objet
simple géométriquement par plusieurs manipulateurs mobiles,
comprenant chacun une base mobile holonome et un bras anthropomorphe redondant
à 7 liaisons rotoïdes (Mitsubishi PA10 7C)(Fig.II.2.b).
Le robot LIAS (Leuven Intelligent Autonomous System) au niveau
du Department of Mechanical Engineering (université catholique de
leuven), comporte une plateforme non holonome de type ROBUTER
équipée de nombreux capteurs, parmi lesquels le laser rotatif et
l'odomètrie ; la manipulation est accomplie grâce au manipulateur
industriel CRS A465 (six liaisons rotoides), comprenant un capteur d'effort,
une pince, ainsi qu'une camera assurant la stéréo vision [Waa03]
comme cela est représenté en Fig.II. 3.
(a) (b)
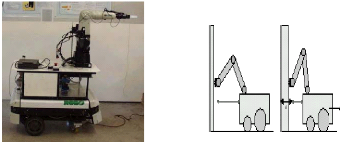
Fig.II.3 : Robot LIAS : (a) Présentation
réelle du robot, (b) Tâche d'ouverture d'une porte
Ce robot (Fig.II.3) a servi de base expérimentale pour
effectuer un mouvement spécifique d'ouverture d'une porte par approche
réactive. Cette même tâche a aussi suscité
l'intérêt d'un autre laboratoire de recherche, lequel a
été original de par l'emplacement du bras, puisque nous avons pu
rencontrer plusieurs exemples de manipulateurs mobiles, et nous avons
remarqué que le bras manipulateur se trouvait généralement
sur la plateforme mobile. Il existe tout de même des cas particuliers,
comme cela est explicité ci après.
II.2.3. Position du bras sur la plateforme
Le robot Yamabico Ten du Intelligent Robot Laboratory de
l'université de Tsukuba au Japon (Fig.II.4), comporte un bras à 7
articulations rotoïdes se trouvant à l'avant du chariot, de ce
fait, son espace de travail est en majorité orienté vers l'avant
et le sol [Bay0 1].
Ce système comprend plusieurs capteurs tels qu'un capteur
d`effort, et une camera se trouvant sur l'organe terminal, ainsi qu'une
ceinture de huit capteurs à ultrasons pour la navigation. L'objectif de
recherche concernant ce robot est le mouvement autonome d'ouverture/fermeture
d'une porte dans un milieu réel, tel qu'un environnement de bureau par
exemple.
Cette tâche particulière requiert que certains
critères soient satisfaits, ce qui a mené l'équipe
de
recherche à effectuer des travaux spécifiques, pour pouvoir faire
en sorte que le
manipulateur mobile accomplisse le mouvement désiré
correctement. Ces travaux
comportent, entre autres, la conception et la
réalisation d'un bras léger à 7 axes pour être
porté par le robot mobile, la coordination de mouvement entre la base
mobile et le bras en traitant l'aspect communication entre les deux
calculateurs indépendants, relatifs à la locomotion et à
la manipulation, ou encore, l'identification de la poignée de porte pour
être saisie, grâce à l'outil de vision se trouvant au niveau
de l'organe terminal.

Fig.II.4 : Robot Yamabico Ten
Comme nous avons pu le remarquer par rapport aux deux exemples
précédents, la tâche d'ouverture d'une porte est
particulière puisque tout dépend du sens d'accès.
Dans le premier cas (Fig.II.3), la porte s'ouvre vers
l'extérieur, ce qui incitera le système à la tirer et
à se déplacer en arrière, alors que, dans le
deuxième cas (Fig.II.4), le robot ne fera que la pousser.
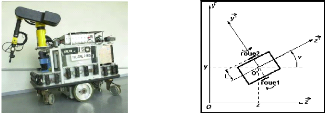
Un autre exemple relatif à l'emplacement du bras est
appelé robot « cible » ou « Target» en anglais du
The Graduate School of Natural Science and Technology de l'université
d'Okayama au Japon. Il a été conçu pour effectuer une
tâche de prise d'objet surélevé sur un support. La
spécificité du travail considéré par
l'équipe de recherche est de traiter le cas de la planification du
mouvement, dans le but d'une préhension avec une plateforme en action de
déplacement. Le système comporte un bras manipulateur à
six axes (rotoîdes) se trouvant de coté (Fig.II.5), pour faciliter
la saisie, car l'objet considéré se trouve de coté et
moins haut que la partie mobile. La plateforme est apte à se diriger en
ligne droite ou en virages.
Pour contrôler le système, un simple PC est
utilisé, munis de Art Linux (Linux temps réel) [Sha04]. La
tâche considérée exprime une coordination bras/plateforme
et c'est là où se trouve la difficulté
d'exécution.
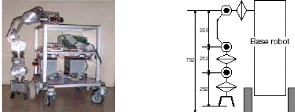
Fig.II.5 : Robot « Target »
II.2.4. Nombre et position des roues motrices
Pour faire que le robot se déplace correctement en
suivant la consigne à la lettre, la position et le type de roues doivent
être connus, comme celles de la plateforme H2bis portant un manipulateur
GT6A de Robosoft (Fig.II.6.a) du Laboratoire d'Architecture et d'Analyse des
Systèmes (LAAS) du CNRS en France, qui a comme particularité
l'emplacement de ses deux roues différentielles (latérales et
située au milieu) motrices et directrices (Fig.II.6.b) ; quatre roues
libres on été placées de sorte à équilibrer
la plateforme. Les capteurs utilisés sont un codeur optique et une roue
odométrique pour chacune des roues motrices [Pad05], ainsi qu'une
ceinture de 32 capteurs à ultrasons, un telemetres laser 2D et une
camera. Ce robot a été surtout utilisé dans le cadre
d'études de la coordination plateforme/manipulateur [Fou98]. Le bras est
à 6 liaisons rotoïdes, chaque liaison comporte un codeur
incrémental, ce bras comprend aussi un capteur d'effort 6 axes
placé au bout de la chaîne cinématique (entre
l'extrémité du bras et l'organe terminal) [Pad05].
(a) (b)
Fig.II.6 : robot du LAAS/CNRS, (a) présentation
réelle du robot, (b) position des roues
II.2.5. Taille du robot
La taille des robots représente un critère de
sélection important, car dans des environnements fortement
encombrés par exemple, les petits robots peuvent être d'un grand
secours, par contre, s'il y a nécessité de transport d'objets
lourds, alors les grands robots sont très intéressants. Le Robot
M3 (Manipulateur Mobile Miniature) du Laboratoire d'Informatique,
Robotique, et de Microélectronique de Montpellier en France (LIRMM) est
un robot de petite taille. Il y a eu au départ la conception de
plateformes mobiles appelées Type1, qui étaient destinées
à être utilisées dans des travaux de coopération
multi robots, chacun d'entre ceux ci est équipé de deux roues
différentielles et d'une ceinture de capteurs à infrarouge (au
nombre de 8 capteurs), qui permet aux robots de détecter des obstacles ;
ensuite, on a conçu spécialement pour l'une de ces plateformes un
mini bras manipulateur léger, pour qu'il puisse être porté
par le petit robot mobile.
Le bras est constitué de trois moteurs qui actionnent
les deux axes, ainsi que l'organe terminal. Tous les moteurs sont fixés
sur le châssis ; la transmission est réalisée grâce
à des poulies, des courroies, et un câble. Ce type de construction
permet d'alléger le poids appliqué sur les axes du bras et
d'obtenir ainsi une dynamique particulièrement performante (aucun moteur
ne doit supporter le poids d'un autre actionneur) [Luc03].
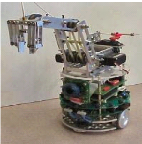
Fig.II.8 : Robot Manipulateur mobile miniature
M3
A l'inverse de M3, il peut exister des robots
gigantesques pour des opérations qui doivent s'effectuer en hauteur, et
pour lesquels un poids assez important pourrait être soulevé,
comme le manipulateur mobile appelé Nadep Jax mobile manipulator
(Fig.II.9). C'est un robot conçu spécifiquement pour des travaux
de rénovation d'avions (ça nous donne une idée sur la
taille du robot) ; ce projet a été financé par la U.S.Navy
(corps de l'armée américaine). Il a une excellente
dextérité pour manoeuvrer et se positionner autour de l'avion. De
son emplacement, les axes du manipulateur peuvent atteindre des positions assez
éloignées sur l'avion, pour exécuter des tâches
d'inspection ou d'application d'enduit par exemple. Le système inclut
une plateforme mobile omnidirectionnelle comportant quatre roues à
actionnement hydraulique, avec un axe pour soulever la structure (comme un
ascenseur), sur laquelle est placé un bras manipulateur à six
axes. Un opérateur humain positionne la plateforme parallèlement
à l'avion, et actionne l'ascenseur pour permettre au système
articulé d'atteindre des positions se trouvant au-dessus de l'avion, ou
au-dessous. Des capteurs laser fournissent une information de retour pour un
contrôle adaptatif dans le but de suivre la surface, en maintenant une
distance prédéfinie. Quand la surface est complètement
traitée, l'ascenseur ou la plateforme est repositionnée, pour
entamer une autre surface. Ce type de système peut rénover un
avion (de type P-3 Orion ASW) à 90% en moins de 120 heures [Swi03].

Fig.II.9 : Robot Nadep Jax Mobile
manipulator
Nous avons pu constater que les robots de grande taille
comportaient des plateformes
omnidirectionnelles, ce qui implique que c'est
un critère de choix important car, ajouter une
plateforme non holonome à un robot gigantesque rendrait la
tâche encore plus complexe à réaliser.
II.2.6. Mode de Manipulation
Dans des définitions classiques des manipulateurs
mobiles, la locomotion est assurée par un véhicule, et la partie
manipulation se fait grâce à un ou plusieurs bras
articulés, sauf, qu'il existe un cas particulier où ce sont les
roues qui effectuent la tâche de manipulation. C'est un projet assez
original, le robot s'appelle Mobipulator (Carnegie Mellon University aux Etats
Unis) [Mas01]. Ce projet a comme but de parvenir à accomplir des
tâches se focalisant principalement sur l'habileté de manipuler
des documents et autres objets de bureau. Ce robot pourrait être
branché sur un ordinateur aussi facilement qu'une camera ou un CD ROM
(Fig.II. 10). Les moteurs, les capteurs, et les composants électriques
utilisés sont de petite taille, ce qui a permis de construire un
système robotique pratique et utile dans un environnement de bureau.
Le but du Mobipulator est d'explorer l'idée d'utilisation
de roues à des fins de manipulation. Le Mobipulator ressemble à
un petit chariot (10cm*10cm), avec quatre roues motrices indépendamment
actionnées (aucune d'entre elles n'est directrice).
Différents modes de locomotion ont été
envisagés par rapport à la tâche à accomplir,
qu'elle soit de manipulation seulement ou de locomotion grâce au seul
mouvement des roues.
Puisque la fonction de ce robot est de mettre de l'ordre à
la demande, les chercheurs ont commencé par exiger de lui d'accomplir
des tâches primaires.
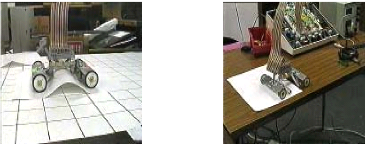
Fig.II.10 : Robot Mobipulator
Une des tâches évoquées
précédemment est le fait de déplacer un morceau de papier.
Pour cela, il roule dessus, ensuite, il utilise ses roues avant pour le
manipuler, pendant qu'il use en même temps des roues arrières pour
la tâche de locomotion. L'autre fonction exigée est de manipuler
un cylindre, il doit placer ses roues avant dessus, ensuite, il les fait
tourner vers l'arrière, comme un être humain qui fait rouler un
baril.
Le fait d'avoir un tel système en environnement de bureau
peut représenter un certain nombre d'avantages, car il est peu
encombrant grâce à sa la taille réduite, peu coûteux,
et discret.
La conception de ce type de système présente
tout de même des imperfections telles que : il lui est difficile de
naviguer à travers des terrains rugueux, et la manipulation d'objet
même simple présente toujours un challenge.
Nous avons illustré précédemment des
caractéristiques particulières relatives à des
manipulateurs mobiles. Nous allons évoquer dans ce qui suit des domaines
dans lesquels la combinaison de la locomotion et de la manipulation a fait ses
preuves.
II.3. Domaines d'applications
La curiosité de l'être humain lui a permis de
parvenir à atteindre les fins fonds de l'espace, ou les grandes
profondeurs sous marines. Ces milieux peuvent représenter des dangers.
La solution primaire est d'envoyer des robots capables de faire face à
ces risques.
II.3.1. Domaine spatial
Les manipulateurs mobiles ont ainsi leur place dans
l'exploration de l'espace comme le robot mobile japonais Micro5 auquel on a
intégré un bras manipulateur. Il est composé d'une petite
plateforme légère, avec une haute mobilité, et une faible
consommation de puissance qui est fournie par deux panneaux solaires se
trouvant au-dessus. Deux cameras se trouvent à l'avant, à l'usage
de capteurs pour pouvoir tâter le terrain (ce robot a été
conçu pour pouvoir évoluer sur sols accidentés) ; il en
existe d'autres autour du robot mobile pour la navigation et les observations
scientifiques. Le manipulateur a été spécialement
développé et conçu pour le micro-véhicule lunaire
Micro5 (Fig.II. 11) [Kun03].
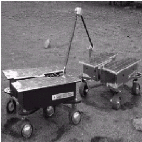
Fig.II.11: Robot Micro5
La position du bras au dessus de la plateforme a
été mûrement réfléchie, puisqu'il a
été placé de sorte à permettre l'équilibre,
et à ne pas troubler la génération de puissance des
panneaux solaires. Il comporte 5 liaisons rotoïdes pour pouvoir effectuer
des opérations de collecte d'échantillons, ou l'insertion
d'équipements scientifiques dans le sol ; cependant, il peut être
étendu à 6 degrés de libertés selon la mission
à réaliser.
II.3.2. Agriculture
Les robots ont aussi été créés
pour faciliter la vie aux humains, et leur éviter des travaux lassants
et épuisants. C'est le cas d'un robot faisant partie du projet AGROBT
(Fig.II.12) du Laboratory For Integrated Advanced Robotics de
l'université de Gênes en Italie. Il a été
conçu pour effectuer des travaux agricoles sous serres pour des
tâches de pulvérisation de
produits, et d'arrachage des fruits abîmés
grâce à un système de vision stéréoscopique
en couleur [Fou98].

Fig.II.12 : Robot Agrobot
Durant la phase de navigation, le système de vision
contrôle le mouvement du véhicule, et l'oriente de sorte qu'il se
trouve au centre du chemin entre les plants. Il est spécialement
étudié pour passer dans des chemins étroits. La
détection d'obstacles s'effectue grâce aux capteurs se trouvant
sur le pare-choc du véhicule.
Le robot s'arrête au niveau des fruits à analyser.
Durant cette étape, une tête robotique composée de
caméras est utilisée pour explorer les plants.
Le bras anthropomorphique à 6 axes est capable de
prendre les tomates d'une manière convenue, dans un but de
pulvérisation et de cueillette, grâce à sa main /pince, qui
est dotée de capteurs lui permettant de contrôler si la tomate a
réellement été cueillie
II.3.3. Domaine médical
Dans le même registre d'aide aux personnes, le robot
Helpmate (Fig.II. 13) du Intelligent Robotics Laboratory de l'université
de Vanderbilt a été conçu dans le but de remplir des
missions en milieu hospitalier où à domicile.
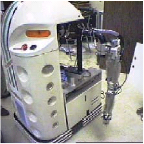
Fig.II.13 : Robot Halpmate.
Helpmate est une plateforme mobile à roues
différentielles comportant des capteurs à
ultrasons sur le
coté et à l'avant, montés sur un panneau vertical. Un
système de vision basé
sur une camera à quatre degrés de libertés
se trouve à l'avant de la plateforme (The Costeffective Active Camera
Head (CATCH) est une camera).
Le manipulateur à 5 axes est monté sur le
coté gauche de la plateforme, l'espace de travail se trouve de ce fait
du coté gauche. Ce système doit permettre une autonomie aux
personnes handicapées, puisque le bras manipulateur porte une
caméra, ainsi que des capteurs vocaux et tactiles [Pac03].
II.3.4. Domaine manufacturier
Le robot Kamro (Fig.II. 14) du Institute for Real-time
Computer Systems And Robotics de l'université de Karlsruhe en Allemagne,
qui est destiné à des tâches autonomes en environnement
industriel, est constitué d'une plateforme mobile omnidirectionnelle lui
permettant une grande facilité de mouvement, dotée de capteurs
à ultrason, et de deux bras PUMA 200 équipés de capteurs
d'effort six axes, ainsi que deux caméras se trouvant sur chacun des
organes terminaux [Lae97].

Fig.II.14: Robot Kamro
II.3.5. Les humanoïdes
Nous n'allions pas terminer notre état de l'art sans
évoquer les humanoïdes, qui représentent un domaine
fascinent, puisqu'ils s'inspirent des êtres humains pour effectuer leurs
tâches; ils peuvent être considérés comme des
manipulateurs mobiles par excellence.

(a) (b)
Fig.II.15 : Robots Humanoïdes : (a) robot ASIMO de
Honda, (b) robot de l'université de Cornell
Le robot Asimo de Honda au Japon (Fig.II.15.a) est à la
pointe de la technologie, puisqu'il évolue de plus en plus, avec ses 34
degrés de liberté. Il a réussi entre autres à
courir de façon quasi humaine, son mouvement autonome et continu lui
autorise le choix de son itinéraire ; et enfin, des fonctions visuelles
et de préhension améliorées lui permettent des
interactions intelligentes avec son entourage. Son seul inconvénient,
est qu'il consomme beaucoup d'énergie.
Le robot de l'université de Cornell (USA) parvient
quand à lui à reproduire quasi parfaitement le mécanisme
de la marche humaine en consommant très peu d'énergie (10 fois
moins qu'Asimo). Les progrès accomplis dans ce domaine depuis quelques
années sont vraiment spectaculaires.
Nous avons pu remarquer que nous n'avons
présenté que des références de robots
américains, européens ou asiatiques, mais pas africains, vu que
la recherche demande beaucoup de moyens, sauf que récemment, il y a eu
la réception d'un manipulateur mobile au niveau du laboratoire de
robotique du centre de développement des techniques appliquées
(CDTA) en Algérie, comportant une plateforme mobile (ROBUTER de
Robosoft) non holonome comprenant 24 paires de capteurs à ultrason;
quatre roues portant le véhicule dont une paire représentant des
roues folles et les autres sont des roues différentielles. Un bras
à six liaisons rotoïdes se trouve juste au dessus de ces
dernières. Il est doté d'un capteur d'effort et d'une
caméra se trouvant au niveau de l'organe terminal qui est une pince.
L'ordinateur de bord se trouve embarqué sur la plateforme. Auparavant,
les expériences sur des manipulateurs mobiles ne se faisaient que par
simulations où l'environnement est virtuel, mais dorénavant,
elles pourront enfin se concrétiser puisque la détention d'un
robot facilite la tache aux chercheurs, qui ont une référence
réelle et pourront de ce fait passer à la phase de
réalisation.

Fig.II.16 : Manipulateur mobile du CDTA
Nous avons eu une vaste idée de travaux qui se
faisaient par rapport aux robots accordant manipulation et locomotion, ce qui
prouve l'efficacité de ces processus, et leurs débuts d'extension
dans de divers domaines.
II.4. Conclusion
Un manipulateur mobile peut s'avérer efficace, mais la
faculté de transport des plateformes mobiles s'en trouve
abandonnée dans le sens où, une bonne partie du poids utile
que peut porter le chariot est accaparé par le bras
manipulateur. Dans le cas des plateformes non holonomes et des bras ayant une
base ne pouvant pas effectuer de rotation, un problème risque de se
poser pour accomplir certaines tâches, puisque pour orienter le bras dans
le sens adéquat, il faudrait effectuer plusieurs manoeuvres, ce qui
représente une perte en temps et en énergie.
Pour pouvoir commander un manipulateur mobile, il faudrait
pouvoir gérer deux systèmes mécaniques conçus de
manières distinctes, et réagissant différemment aux
influences extérieures; il nécessiterait donc d'avoir une
connaissance à priori du milieu dans lequel va évoluer le robot
relativement à l'encombrement (existence ou non d'obstacles), ou encore
aux influences extérieures par rapport à la gravité (qui
constitue un élément important dans le traitement de ce type de
systèmes), ainsi que le type de tâche à accomplir, pour
aboutir à l'action attendue.
Pour notre part, nous sommes partis de l'hypothèse de
travailler sur un bras manipulateur redondant. Notre choix s'est porté
sur le robot Mitsubishi PA10 7CE à 7 degrés de libertés.
Ce robot est redondant, il a été aussi utilisé en
manipulation mobile d'après Fig.II.2.b ou encor dans [Kan0 1] ; ses
caractéristiques sont accessibles et ont été
illustrées en Annexe.
Le choix de la plateforme est plus simple, celle
sélectionnée est non holonome de type voiture, comportant deux
roues directrices se trouvant à l'avant, et deux roues arrières
pour stabiliser le système.
|
|
Chapitre III
|
|
Notions fondamentales pour
|
|
la modélisation des
|
|
manipulateurs mobiles
|
|
|
III.1. Introduction
Combiner la manipulation et la locomotion implique que les
caractéristiques des deux systèmes peuvent transparaître
dans le robot articulé mobile. La modélisation des manipulateurs
mobiles considère le fait de traiter le système à part
entière et de ne pas dissocier la partie mobile du bras manipulateur ;
c'est dans ce sens que nous allons définir dans ce qui suit certaines
notions qui nous seront indispensables dans notre application. Ce chapitre sera
donc consacré essentiellement à des définitions, puisque
nous nous intéresserons aux manipulateurs mobiles en tant que
systèmes complexes.
III.2. Notions de coordonnées III.2.1.
Coordonnées opérationnelles
Avant d'entamer la définition des coordonnées
opérationnelles, nous nous devons de décrire l'outil
d'interaction avec l'environnement pour une meilleure compréhension.
III.2.1.1. Organe terminal
L'évolution spatiale et temporelle d'un robot en
général considère le fait de focaliser sur une de ses
parties en essayant de la déplacer.
Pour ce qui est d'un manipulateur mobile, le corps
d'intérêt est situé au bout de la chaîne
cinématique et est appelé organe terminal (noté
OT par la suite) [Pad05]. En d'autres termes, l'organe terminal pour
un manipulateur mobile est celui exprimé au Chapitre I (paragraphe I.4),
puisque c'est le bras qui est apte à interagir avec l'environnement.
III.2.1.2. Définition des coordonnées
opérationnelles
Définir la situation d'un objet libre
représenté dans un espace à trois dimensions
nécessite, dans le cas général, la connaissance de six
paramètres indépendants. Trois de ces paramètres
définissent la position d'un point de l'objet, et les trois autres
grandeurs déterminent son orientation autour du point
précédent [Gor84].
Ces coordonnées en nombre minimal seront englobées
sous le vocable «situation«.
Les six coordonnées indépendantes
représentant la situation de l'OT, forment un vecteur
A dit vecteur des coordonnées opérationnelles.
En fonction de la mission à accomplir et de la nature
du système portant l'OT, seul u de ces six
coordonnées sont à contrôler [Pad05], A
s'écrit alors : A= [A1 A2 ...A u] T lesquelles
sont des coordonnées en nombre minimum qui suffisent à
caractériser la situation de l'OT dans un repère de
référence RA.
Les paramètres de position de l'organe terminal sont
classiquement choisis comme étant les coordonnées
cartésiennes du point OT dans RA, notés
XA, VA et ZA.
En ce qui concerne l'orientation, le choix des
paramètres n'est pas aussi automatique, une
représentation non
redondante est préférable car nous voulons avoir un
système de
coordonnées opérationnelles en nombre minimal, et
en même temps suffisant pour bien
représenter l'objet
d'intérêt (OT) dans l'espace tridimensionnel, c'est
à dire avec trois
paramètres ; les angles d'Euler classiques
représentent une des paramètrisations notées
ØA,ÈA,et ÖA.
Si nous nous intéressons à toutes les
coordonnées définissant la situation complète de l'OT
dans un espace à trois dimensions, nous avons :
? 1 1
X A
A 1
? ? ? ?
Y A
? ? ? ?
A 2
? ? ?
Z A
A 3
A = ? = ? ?
? ? ? ?
Ø A 4
A
? ? ? ?
È A 5
A
? ? ? ?
? ? ? ? ? ? ? ?
Ö A 6
A
Des exemples présentés dans le paragraphe III.9
seront plus explicites. III.2.1.3. Vitesses et
accélérations opérationnelles
Les composantes de A& vecteur des
vitesses opérationnelles et A&& vecteur des
accélérations opérationnelles sont les
dérivées temporelles, respectivement premières et
secondes, des composantes du vecteur A. Pour u=6, nous avons
[Pad05] :
? ? ? ? ?
& & 1
& & Ò
?
? 1
X A
A 1
? ? ?
? ? ?
Y A
A 2
? ? ?
Z A
&
A
& &
? ? = ?
A 3
& &
? ? ?
Ø A A 4
? ? ?
È & A &
A 5
? ? ?
? ? ? ? ? ?
Ö & A &
A 6
? 1 1
X A
&& &&
A 1
? ? ? ?
Y A
&& &&
? ? ? ?
A 2
? ? ? ?
Z A
&& &&
A 3
et A && = ? = ? ?
&& &&
Ø A Ò ? Ò
A4
? ? ?
È && A &&
A Ò ? Ò
5
Ö && &&
? ? ? ? ? ?
A
A 6
Les 3 premières composantes de
A& et A&& sont les
composantes dans RA de la vitesse et de l'accélération
linéaire de l'OT. En ce qui concerne les dérivées
temporelles premières et secondes des paramètres
définissant l'orientation, elles ne correspondent pas aux composantes
dans RA de la vitesse et de l'accélération angulaire de
l'OT.
Remarque
Les accélérations opérationnelles et
généralisées ne vont pas être prises en compte dans
notre travail pratique, car elles sont souvent utilisées en
modèle dynamique, c'est la raison pour laquelle nous n'allons plus les
évoquer par la suite.
Nous allons entamer dans ce qui suit la définition
d'une configuration, cet aspect est étroitement lié à la
notion de liaison qui sera développée en premier, ensuite, nous
passerons à la notion d'holonomie, pour aboutir enfin sur la
définition des coordonnées généralisées.
III.2.2. Notions de coordonnées
généralisées III.2.2.1. Notion de liaisons
La description du mouvement d'un objet évoluant dans un
espace à 3 dimensions composé de nc corps se
fait, en accordant à chacun de ces derniers ses six coordonnées,
ce qui donne pour le système complet 6xnc variables.
Ces paramètres sont appelés paramètres primitifs du
système [Pad05] et sont notés
p1,p2,....,p6xnc. Ils ne sont
pas indépendants les uns par rapport aux autres puisqu'ils sont
contraints par des liaisons.
Notre intérêt ira surtout vers l'aspect liaisons
mécaniques classiques (par contact entre 2 corps) ; leurs
spécificités est qu'elles limitent l'évolution spatiale et
temporelle des différents corps du système [Gor84] ; il en existe
deux types tels que :
- Les liaisons internes qui contraignent le mouvement d'un
corps par rapport à un autre (appartenant au même objet), en
intervenant entre eux, leur permettant une mobilité relative.
-Les liaisons externes qui permettent un mouvement relativement
à des corps externes au système, ayant une évolution
supposée connue.
La forme générale des équations de
liaisons (internes ou externes) utilisant les paramètres primitifs,
leurs dérivées par rapport au temps et éventuellement le
temps [Pad05] est la suivante :
6*nc
?
& + = (3.1)
á ( p , , p ,t )p â ( p , ,
p ,t ) 0
i 1 6 nc i 1 6 nc
i 1
=
Les valeurs que prennent les paramètres á et
â ( décrivant les caractéristiques des liaisons) nous
informent sur le type de la liaison présentée, ainsi, il en
existe un certain nombre.
III.2.2.2. Types de liaisons
Une liaison est dite homogène si, au niveau de
l'équation (3.1) â =0, par contre, une liaison est
scléronome si elle ne dépend pas explicitement du temps ; cela
implique que
?á=0 avec i= 1,
,6xnc et â=0, L'équation
homogène s'écrira alors:

?t
i
6 xnc
? i (p , , p )p &
á =0 (3.2)
1 6 nc i
i 1
=
À l'inverse, une liaison est considérée
comme rhéonome si elle dépend explicitement du temps. Les
liaisons externes, définies par le mouvement d'un corps externe au
système, sont en général considérées comme
rhéonomes.
Enfin, une liaison est dite parfaite si elle présente
certaines propriétés telles que :
-Les corps mis en jeu sont indéformables ; cette
caractéristique considère que pour tout couple de point
appartenant à l'objet considéré, la distance entre ces
points reste constante.
- La liaison doit être non dissipative. Elle consiste en un
roulement sans glissement entre les deux corps formant la liaison.
En général, lors de l'étude des
systèmes, les liaisons sont considérées comme parfaites,
cette hypothèse est très réaliste du point de vue
cinématique, mais si l'on se consacrait à une étude
dynamique, les couples résistants induits par les frottements dans les
liaisons peuvent prendre des valeurs très importantes, et sont donc
parfois modélisées.
III.2.2.3. Holonomie
Comme nous l'avons défini dans le chapitre I
(Paragraphe I.3.2), un système holonome présente une absence de
restriction sur le déplacement, puisque tous les mouvements lui sont
autorisés, contrairement aux systèmes non holonomes qui sont
soumis à des contraintes cinématiques, et leurs mouvement est
limité.
Dans ce qui suit, nous allons expliquer ces notions relativement
à l'aspect liaison.
Lorsque l'équation (3.1) est intégrable, la liaison
et l'équation correspondantes sont dites holonomes et elles peuvent
alors s'écrire [Pad05] :
f(p1, ,p6 xnc ,t)= 0 (3.3)
En d'autres termes, une contrainte ou liaison est dite
holonome si elle peut s'écrire sous la forme f (q,t)=0, alors
qu'une contrainte ou liaison est dite non-holonome si elle est de la forme non
intégrable[Fou98] définie par l'expression f(q, q&
)=0 (sachant que q est une coordonnée
généralisée et q& est la vitesse
généralisée correspondante, elles vont être
décrites
dans le paragraphe suivant). Un système contraint par au
moins une liaison non holonome est de surcroît non holonome [Pad05].
III.2.2.4. Définition des coordonnées
généralisées
On appelle équations primitives de liaison, certaines
équations de liaison holonomes prises en compte permettant la
réduction du nombre de paramètres nécessaires à la
description du système matériel (robot). Ainsi, pour un
système à nc corps, si le nombre
d'équations de liaisons primitives choisi vaut hp,
la configuration du système est défini par
í=(6xnc)-hp
paramètres qui forment le vecteur q[Pad05] , dit vecteur des
coordonnées généralisées. La configuration du
système est alors défini comme :
|
q
|
? 1
q 1
? ?
q
? ? ? ?
2
:
? ?
? ]
qí
|
La configuration d'un système dans un repère RA
est connue, lorsque la position de tous les points du système est
définie de manière unique dans RA.
Les coordonnées généralisées sont
l'ensemble des paramètres en nombre minimum, permettant de
décrire la configuration du système.
Pour un système holonome tel qu'un bras manipulateur
usuel, toute les équations de liaisons sont généralement
choisies comme primitives.
Les coordonnées généralisées avec
le temps t forment un paramétrage du système. On
définit les équations de liaison holonomes complémentaires
comme étant les équations n'ayant pas été choisies
pour réduire le nombre de paramètres nécessaires à
la description du système matériel, elles peuvent être
écrites à partir des coordonnées
généralisées et nous avons :
fi (q,t)=0 avec 1 = i =
hc (3.4)
hc étant le nombre d'équations
de liaisons holonomes complémentaires.
Les équations relatives aux liaisons non holonomes, sont
celles ne permettant pas la réduction de la taille de l'espace des
configurations, nous pouvons donc écrire :
n
? & + = avec 1 = i = h (3.5)
á ( q,t )q â ( q,t ) 0
ij j i
j 1
=
où h est le nombre d'équations non
holonomes.
Si hc+h =0, le paramétrage du
système matériel est complet, sinon, il est incomplet. Dans le
cas d'un système non holonome, le paramétrage est toujours
incomplet.
Notons aussi que h=hp+hc est le
nombre de liaisons holonomes pour un système donné, et que h+
h est le nombre global de liaisons.
III.2.2.5. Description des vitesses et
accélérations généralisées
Il existe une dépendance entre les coordonnées
généralisées pour les systèmes dont le
paramétrage est incomplet ; seuls les
nddl=í-(hc- h) (avec
í est le nombre de coordonnées
généralisées) de ces coordonnées peuvent avoir donc
une vitesse choisie indépendamment de celle des autres ; nddl
est appelé le degré de liberté global du
système matériel. Le vecteur des q& des vitesses
généralisées du système, dont les composantes, sont
les dérivées temporelles des composantes de q ; il en
est de même pour le vecteur q&& des
accélérations généralisées
[Pad05] avec :
|
&
q
|
? 1
q & 1
? ?
q &
? ? ? ?
2
:
? ?
? ]
qí
&
|
et q &&
|
? 1
q && 1
? ?
q &&
? ? ? ?
2
:
? ?
? ?
qí
&&
|
III.3. Notion d'espace : III.3.1. Espace
opérationnel
L'espace opérationnel est l'espace des
coordonnées dans lequel est représentée la situation de
l'organe terminal, on considère donc autant d'espaces
opérationnels que d'organes terminaux [Khl99].
La situation de l'OT est alors définie sur un
espace EOP de dimension u, appelé espace
opérationnel [Fou98].
Puisque ce sont les coordonnées cartésiennes qui
ont été prises en compte pour les coordonnées
opérationnelles en position, alors, elles vont être
traitées dans R 3 et le groupe SO(3) pour l'orientation (ce groupe est
considéré comme l'ensemble des rotations dans l'espace
tridimensionnel) est appelé groupe des rotations. On note
EOP l'ensemble de ces espaces, égal à R 3 x
SO(3).
Ainsi, dans un espace à trois dimensions, le nombre de
degrés de libertés minimal etant égal à six, nous
pouvons donc en conclure que dans ce cas de figure u=6.
III.3.2. Définition de l'Espace des
Configurations
On appelle Espace des Configurations (Espace
Généralisé) du système l'espace des
coordonnées généralisées. Il est noté
EGE et est de dimension í (nombre de
coordonnées généralisées)[Fou98].
III. 4. Notions de tâches
Avant d'entamer la description d'une tâche, nous nous
devons de décrire certaines phases essentielles qui doivent la
construire ; elle s'effectue généralement en deux étapes
[Fou98] :
· Trajectoire
Il s'agit de déterminer les configurations que le robot
devra successivement atteindre pour respecter la tâche, sans
s'intéresser au comment le faire dans le temps. Les trajectoires
obtenues (description des différentes configurations) pour le
système sont purement géométriques ; leurs planifications
représentent la stratégie de déplacement du système
dans l'espace.
· Mouvement
Ce terme est étroitement lié au temps,
c'est-à-dire que c'est une évolution spatiale et temporelle de la
tâche, car la trajectoire définie précédemment est
maintenant considérée relativement au temps.
Pour ce qui est de la planification de mouvement, nous faisons
en sorte qu'une fois la tâche parfaitement définie
(géométriquement), il est possible de rechercher des commandes
pour le système en respectant la planification de trajectoire
établie précédemment ; on s'intéresse donc ici a
une stratégie de mouvement le long de la trajectoire
géométrique.
En d'autres termes, si on ne s'intéresse qu'aux
trajectoires, alors l'étude de l'évolution temporelle du
système n'a pas lieu d'être, et là, un paramètre
s=[0,1] va intervenir pour former une trajectoire ; si par
contre on considère le mouvement du système, alors on
évoquera dans la formulation de la tâche la variable temporaire
t=[0,tf].
Nous allons effectuer dans ce qui suit la description d'une
tâche. III.4.1. Définition d'une tâche
généralisée
Elle consiste à piloter l'ensemble des
coordonnées généralisées, c'est une courbe
paramétrée définie dans EGE reliant
deux configurations initiale qi et finale qf ou proches
q et q+äq [Fou98].
III.4.2. Définition d'une tâche
opérationnelle
Une tâche opérationnelle est une courbe
paramétrée définie dans EOP reliant
deux situations initiale et finale Ai et Af ou proches
A, A+äA[Fou98] .
III.4.3. Types de Tâches
III.4.3.1. Tâche Généralisée
Point à Point TGPP
Elle se fait entre une configuration initiale qi et
finale qf imposées ; cela revient à trouver une
trajectoire généralisée q(s) reliant ces deux
configurations (q(0)=qi et q(1)=qf).
III.4.3.2. Tâche Opérationnelle Point à
Point TOPP
Cette tâche consiste à trouver une trajectoire
généralisée q(s) pour une situation initiale
Ai et finale Af imposées, cela revient à
considérer qi qui nous conduit à la situation
Ai et qf à Af.
III.4.3.3. Tâche à Trajectoire
Opérationnelle Imposée TTOI
Elle revient à trouver pour Ai, et Af et
A=A(s) imposées (Ai=A(0) et
Af=A(1) ) une trajectoire généralisée
correspondante q(s).
III.4.3.4. Tâche à Mouvement
Opérationnel Imposé TMOI
Cette tâche est différente des
précédentes dans le sens où elle fait intervenir la
variable temps, car, pour Ai, Af, et A=
A(t) imposés (A(0)=Ai et
A(tf)=Af ) on doit trouver les mouvements
généralisés correspondants q(t).
III.5. Notions de modèles de transformation
d'espaces III.5.1. Modèle Géométrique Direct
Le modèle géométrique direct est le
modèle qui permet d'exprimer la situation de l'organe terminal
OT en fonction de la configuration du système,
c'est-à-dire les coordonnées opérationnelles
décrites par le vecteur A=[A1
A2...Au]T en fonction des coordonnées
généralisées exprimées à travers le vecteur
q=[ q1 q2...qí]T
Le modèle géométrique direct
représente une application f non linéaire, elle
s'écrit :
f : EGE EOP
q Á = f(q)
Le modèle sera présenté comme suit :
A1=f1
(q1,q2...?qí)
A2=f2
(q1,q2...?qí)
:
Au=fu (q1,q2...?qí)
III.5.2. Modèle géométrique
Inverse
C'est le modèle qui permet d'exprimer la configuration
du système en fonction de la situation de l'OT (ou les
coordonnées généralisées en fonction des
coordonnées opérationnelles). Le MGI s'écrit alors :
q=f-1(A).
La construction de ce type de modèle pose très
souvent des problèmes, surtout dans le cas où le nombre de
coordonnées généralisées est supérieure au
nombre de coordonnées opérationnelles
(u<í) appelé aussi redondance
géométrique.
III.5.3. Modèle Cinématique Direct
C'est le modèle qui permet d'exprimer la
différentielle de la situation de l'OT en fonction de la
différentielle de la configuration (ou les vitesses
opérationnelles en fonction des vitesses
généralisées). Ce modèle représente une
application linéaire entre l'espace tangent à l'espace
généralisé en une configuration particulière, et
l'espace tangent à l'espace opérationnel en la situation qui
correspond (par le modèle géométrique direct) à la
configuration particulière. Le Modèle cinématique est
l'application linéaire telle que :
J(q) : TqEGE TAEOP.
q& A&
TqEGE est l'espace tangent à la
variété EGE en la configuration q,
et TAEOP est l'espace tangent à la
variété EOP en la situation A telle
que A =f(q). J(q) désigne
donc à la fois l'application linéaire du modèle
cinématique (ou différentiel) direct, et sa matrice qui est une
matrice uxí. Le matrice jacobienne de la
fonction f calculée précédemment (dans le
modèle géométrique direct) de dimension
uxí est comme suit :
?
?
?
??
1
?
?
?]
·? f ? f 1
1 1
...
A & 1 ? ?
? q ? &
1 ? q q 1
í
? ? 1 Ò ?
: = : ... : :
? ? ? ?
A & ? f ?
u q
? ? u f u ? ? ? &
] ... í
? ? ?
? ? q q
1 í ]
1 444 2 444 3
J
Ce modèle est considéré comme le
modèle cinématique du système. Il existe un autre type de
modèle dit modèle différentiel direct réduit
(MDDR), il consiste à réduire la taille du vecteur des vitesses
généralisées qui sont liées, de ce fait, le nombre
de colonnes ou/et de lignes de la matrice jacobienne décroîtra ;
ce genre de procédés est utilisé
généralement dans le cas de systèmes non holonomes.
Lors du calcul de ce modèle cinématique
réduit, il en résultera une matrice jacobienne J dite
réduite.
III.5.4. Modèle Cinématique Inverse
Le modèle différentiel inverse comme son nom
l'indique présente le fait d'inverser le modèle
différentiel direct, c'est une application linéaire J #
dite inverse généralisée de
J(q).
On peut avoir des difficultés à inverser ce
modèle dans le cas où la matrice jacobienne J ne
présente pas un rang plein.
III.6. Types de Configurations
III.6.1. Notion de degrés de mobilité du
système
Le degré de mobilité d'un système
mécanique (Ddm) est égal à la
différence entre le nombre de ses coordonnées
généralisées égal à í, et le
nombre de contraintes non holonomes indépendantes égales à
ô [Fou98].
Ddm=í-ô
Pour un système holonome, ce degré de
mobilité Ddm est égal
àí, alors que pour un système non holonome,
Ddm sera égal au nombre de paramètres de
commande de mobilité du système : Ddm pourra être
calculé comme [Bay01] :
Ddm=rang( J )+dim(Ker(
J))
Avec Ker( J) représentant le noyau de
l'application J.
Ces notions seront explicitées dans le
paragraphe III.9.
III.6.2. Degrés de Libertés
Pour une configuration du système mécanique
q donnée, sa structure impose à son OT un
certain nombre de contraintes de position et d'orientation, de ce fait, il
apparaîtra ce que nous appellerons le degrés de liberté
local uddl(q) de cet OT ; il est défini
comme le rang de la matrice jacobienne (il dépend donc de la
configuration du système) [Fou98]:
uddl(q)= rang(J)
Lorsque la configuration du système mécanique
évolue de toutes les manières possibles alors [Bay01]:
u=max (uddl)
u est appelé degrés de liberté
(global) de l'OT. Le calcul de ces deux entités (degrés
de libertés global et local) est donc étroitement lié au
rang de la matrice jacobienne.
III.6.3. Configurations Singulière et
régulière
Sachant que le calcul des matrices jacobiennes (qu'elles
soient réduites ou non) fait intervenir les coordonnées
généralisées du système, alors, ces matrices
peuvent être exploitées pour mettre en avant certaines
caractéristiques, qui n'auraient pas pu être perçues lors
du calcul des modèles géométriques ; la singularité
représente une de ces particularités. Avant de définir
cette notion, nous allons émettre les hypothèses suivantes
[Pad05] :
-Le système est tel que le rang
(J)=u.
-Le rang de J et le rang de J sont
identiques. Nous avons fait cette supposition car, il existe en effet des
manipulateurs mobiles à roues pour lesquels le rang de la matrice
jacobienne réduite est inférieur à celui de la matrice
jacobienne, mais ces systèmes peuvent présenter des
imperfections, et ils sont dits « Mal conçus ».
Par définition, nous
avonsuddl(q)=u, si uddl(q)= u
alors, nous considérons cette configuration comme
régulière(CR). La propriété
uddl(q)<u par contre correspond
à une chute du rang (J) ; dans ce cas, la configurations
q correspondante (grâce à laquelle nous avons
calculé la matrice jacobienne) est dite Singulière (CS), La
détermination des configurations singulières nécessite
donc l'étude du rang de J.
Le type de représentation de l'orientation de
l'OT (car il en existe un certain nombre) peut être à
l'origine d'une chute du rang de la jacobienne.
Le calcul de la matrice J . J T
peut nous renseigner sur l'état de la configuration du système
(CS ou CR). Si le déterminant Det( J . J
T) est non nul, alors, la matrice J . J
Test positive et donc inversible, ce qui nous mène
à déduire que J est de rang plein en ligne, et la
configuration correspondante est une configuration régulière
(CR). Si par contre, le déterminant Det( J J
T)=0 , alors J n'est plus de rang plein en lignes et
donc, le système est en configuration singulière (CS). Les
configurations singulières sont donc celles qui annulent le
déterminant, et elles dépendent directement des
différentes grandeurs géométriques qui
caractérisent le système. Quand la matrice jacobienne J
se présente comme carrée, il suffit donc de calculer
directement son déterminant Det( J), pour
détecter si le système est en configuration singulière ou
régulière.
La différence u-uddl entre le
degré de liberté global et le degré de liberté
local de l' OT considéré est appelé ordre de la
configuration singulière.
Remarque
Nous avons évoqué la matrice jacobienne qui peut
être considérée comme la jacobienne réduite ou non,
vu que nous avons émis l'hypothèse qu'elles étaient de
rangs égaux.
III.7. Notions de redondances
III.7.1. Notions de redondance
géométrique
La notion de redondance géométrique exprime le
fait que le nombre de coordonnées généralisées
í est strictement supérieur au degré de
liberté (global) u de l'OT. L'ordre de redondance
géométrique est égal à í-u
La notion de redondance géométrique signifie que
pour une situation donnée de l'OT, il existe une
infinité de configurations du système ; il est donc
considéré comme géométriquement redondant si
u<í; l'ordre de cette redondance
géométrique étant í-u. Par contre, si
u=í, le système mécanique n'est pas
géométriquement redondant, alors que la condition
u>í s'avère impossible.
Dans des conditions de redondance géométrique,
le modèle géométrique inverse présente une
infinité de solutions. Son étude peut être utile en
planification de mouvement, même si elle s'avère peu indicatrice
de l'état de la cinématique du système.
III.7.2. Notions de redondance cinématique
Cette notion n'est considérée que pour des
systèmes non holonomes, car, dans le cas de systèmes holonomes
(tels que les bras manipulateurs usuels par exemple), l'indice de
mobilité et le degré de liberté s'en trouvent confondus ;
de ce fait, redondance géométrique et cinématique sont une
seule et même notion.
La dimension du noyau de l'application J(q)
considérée (en une configuration de
redondance différentielle q) est liée
à la redondance du système, puisqu'elle présente l'ordre
de cette redondance. Par conséquent, cette notion est
présentée par le fait que le degré de mobilité du
système soit supérieur à son degré de
liberté (Ddm-u >0). Pratiquement, la
notion de redondance cinématique exprime le fait qu'il existe une
infinité de commandes umob associées à une
vitesse opérationnelle A& donnée
(infinité de solutions du modèle cinématique inverse).
Dans le cas où Ddm-u =0, le système
est qualifié de non redondant, par contre, si
Ddm -u<0, le système est
considéré comme sous-actionné.
Nous allons dans ce qui suit nous intéresser aux
particularités (en termes de contraintes) des systèmes non
holonomes.
III.8. Contraintes de Roulement Sans Glissement
Vu que le système de locomotion des robots mobiles que
nous devons étudier inclut des roues, celles ci sont les seules
responsables de son mouvement, leur contribution implique tout de même
des contraintes en raison d'un contact avec le sol. La nature de l'interaction
(régularité, matériaux en contact) a une forte influence
sur les propriétés du mouvement des roues relativement au sol. En
supposant que les liaisons sont parfaites, cela induira trois hypothèses
[Bay05] :
-Le sol comme les roues sont indéformables
-La surface de contact est assimilée à un point
-Les roues, de rayon r, roulent sans glisser sur le
sol
On supposera toujours qu'il y aura roulement sans glissement
(r.s.g), et que le sol est parfaitement plan. En pratique, de légers
glissements sont engendrés lors du contact de la roue avec la surface
sur laquelle a lieu le mouvement. L'hypothèse de dire qu'une roue pleine
est indéformable est fausse dans le cas de roues équipées
de pneus.
Le r.s.g d'une roue verticale évoluant sur un plan se
traduit par une vitesse nulle au point de
contact B entre la roue
et le plan, ce point ayant comme coordonnées (x,y) par rapport
à un
repère fixe RA. è?
représente l'orientation de la roue par rapport à
xrA, ? est l'angle de rotation
de la roue. ùP est le vecteur de sa vitesse de
rotation etvP exprime la vitesse du centre P.
La figure Fig.III. 1 exprime les différents
paramètres liés aux contraintes de roulement sans glissements sur
le sol [Fru05].
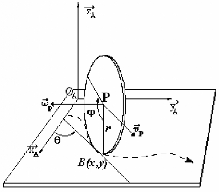
Fig.III.1: Présentation des paramètres
d'une roue verticale sur un plan
Les équations des contraintes de r.s.g sont
exprimées relativement à chaque roue, la nullité des
vitesses correspondantes se traduit donc selon deux plans [Pad05] :
-dans le plan vertical de la roue pour tout type de roues :
[ ( ' ) ( ' ) ( )] ( ) ( ) 0
- + + + + + + =
Sin Cos bCos R A & rCos &
á â ã á â ã â
ã á ã ?
T (3.6)
p
-dans le plan orthogonal au plan vertical de la roue
(excepté pour les roues suédoises) :
[Cos(á '+â) Sin(á
'+â) b'+ bSin( â ) R( á ) A &
p + b' â & = 0 (3.7)
] T
R(á) est une matrice de rotation
d'angle á autour de l'axe zr [Khl99], cette matrice est prise
en compte car la plateforme évolue dans le plan (OA
, xA, yA), ce qui expliquera qu'elle soit
considérée comme évoluant et s'orientant autour de l'axe
zr .
? -
Cos( ) Sin( ) 0
á á 1
R( ) Sin( ) Cos( ) 0
? ?
á á á
= ? ?
? ?
? 0 0 1 ÿ
Les paramètres ?, â, á', b , ã et b'
sont présentés en chapitre I, paragraphe1.7.1. III.9.
Etudes de différents systèmes
Dans les prochains paragraphes, nous concrétiserons les
différentes notions évoquées précédemment
grâce à des exemples.
Nous commencerons par une présentation des bras
manipulateurs, et plus précisément d'une chaîne
cinématique ouverte comprenant deux liaisons rotoïdes, nous
décrirons les différentes notions qui lui sont relatives,
ensuite, nous étudierons les robots mobiles où nous
présenterons une plateforme de type voiture, et là nous
évoquerons les contraintes de roulement sans glissement,
caractéristique spécifique aux systèmes mobiles à
roues.
Un dernier paragraphe sera consacré aux manipulateurs
mobiles, où nous traiterons du cas d'un système mécanique
représenté en deux dimensions, composé d'une plateforme
mobile sur laquelle est placé le bras manipulateur double pendule
horizontal.
Avant d'expliciter les différentes significations des
coordonnées généralisés pour un bras manipulateur
et pour une plateforme mobile, nous devons rappeler que pour une structure
articulée, la liaison est représentée par ce que nous
avons appelé dans le chapitre I une articulation, pour une plateforme
mobile, une liaison est moins flagrante ; elle représente la prise en
considération de la configuration des roues comme cela est
explicité ci-dessous.
III.9.1. Paramétrisation d'un bras manipulateur de
type série
A titre d'exemple, si on étudie un système
articulé évoluant dans un espace à trois dimensions en
considérant les positions et rotations, alors les coordonnées
généralisées seront au nombre minimal égal à
6.
Pour un manipulateur quelconque constitué de nb
corps rigides reliés en série par nb liaisons
rotoîdes et/ou prismatiques, nous avons, dans un vecteur qb
à nb coordonnées indépendantes.
|
qb
|
? 1
q 1
? ?
q
? ?
2
? ?
:
? ?
? ? ? ?
q n b
|
L'exemple choisi illustré en figure Fig.III.2
représente les différents paramètres nécessaires
à la description du mouvement du bras manipulateur, composé de
deux corps rigides de longueurs respectives a1 et a2 (non
nulles) et comportant deux liaisons rotoïdes. Ce bras comporte deux
degrés de libertés puisqu'il compte deux liaisons rotoïdes
aptes à effectuer des rotations indépendamment les unes aux
autres.
Les coordonnées généralisées sont
représentées dans le vecteur de configuration q =
[qb1 qb2]T (sachant que qb1
et qb2 sont les angles de rotation des deux
liaisons). La dimension de l'espace généralisé est
égale au nombre degré de liberté du système
dim(EGE)=í=2.
Le vecteur des coordonnées opérationnelles
A=[A1 A2 A3]T=[XOT YOT
Ø]T représente les coordonnées en position
XOT et YOT du point
OB2 dans le repère de la base du bras
RB0(OB0,xB0,yB0) ainsi que l'orientation Ø du
second corps dans le même repère ; la
dimension de cet espace opérationnel
dim(EOP)est égale à u=3, car c'est le
nombre de coordonnées opérationnelles du
système[Bay01].
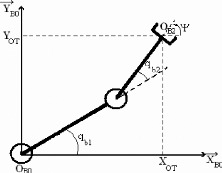
Fig.III.2 : Exemple de paramètrisation d'un bras
manipulateur à 2 degrés de liberté.
Le modèle géométrique direct du
système articulé est :
A1=a1Cos(qb1)+a2Cos(qb1+qb2) A
2=a 1Sin (qb1)+a2Sin (qb1+qb2)
Á3=qb1+qb2
Le modèle cinématique sera calculé en
dérivant les coordonnées opérationnelles, il en
résultera :
&
A a Sin q a Sin q q q a Sin q q q
1 1 1 2 1 2 1 2 1 2 2
= - + + - +
( ( ) ( )) ( )
& &
b b b b b b b
&
A a Cos q a Cos q q q a Cin q q q
2 1 1 2 1 2 2 2 1 2 2
= - + + + +
( ( ) ( )) ( )
& &
b b b b b b b
&
A q q
3 1 2
= +
& &
b b
La représentation matricielle de ce modèle est donc
:
E i E - + + - +
A ( a Sin( q ) a Sin( q q )) a Sin( q q )
&
? ? ? ? E i
1 1 b1 2 b1 b2 2 b1 b2 q &
& I b1
? ? = ? + + + I ?
A a Cos( q ) a Cos( q q ) a Cos( q q )
? ? ? ' L ]
2 1 b1 2 b1 b2 2 b1 b2 q &
& b2
? ? ?
A ? ?
1 1
3 1 3
Jb
Le degré de mobilité de ce bras manipulateur est
égal à Ddmb=2 vu qu'il n'y a pas de
contraintes non holonomes, il est de ce fait égal au degré de
liberté du système u=Ddmb=2.
Vu que notre système présente la
caractéristique í<u, cela implique que,
géométriquement, c'est un cas de figure considéré
comme impossible, alors que cinématiquement, il est sous actionné
(d'après le paragraphe III.7).
Nous allons considérer u=í
pour que le système ne soit plus sous actionné, cela nous
amène à paramétrer notre processus en modifiant le vecteur
des coordonnées opérationnelles, tel que A=[XOT
YOT]T en éliminant la composante de l'orientation,
de ce fait, ce bras est considéré comme non redondant
vis-à-vis de la tâche demandée car il possède deux
actionneurs.
Dans ce cas, la matrice Jacobienne devient :
- + + - +
( ( ) ( )) ( )
a Sin q a Sin q q a Sin q q l
1 1 2 1 2 2 1 2
b b b b b
J b = ? ?
? + + +
a Cos q a Cos q q a Cos q q
1 1 2 1 2 2 1 2
( ) ( ) ( )
b b b b b ÿ
Le déterminant de Jb vaut donc :
Det(Jb)=a1a2Sin(qb2)
En estimant l'expression de ce déterminant, nous
pourrons constater que si Det(Jb)=0, la configuration
correspondante est singulière ; dans le cas du bras
étudié, cela implique que qb2=0+ kð
(k? N). Cette condition nous permet de considérer que le
degré de liberté local
uddl est égal à 2 pour toutes les
configurations non singulières. Le degré de liberté global
u est égal également à 2.
Nous pourrons conclure que pour
qb=[qb1 0+kð(k?
N)]T (quel que soit qb1), le bras est en
singularité ; dans ce cas, le degré de liberté local
uddl décroît, il devient égal à
1 (uddl= 1). Par contre, le degré de liberté
global ne change jamais et reste toujours égal à 2.
Le bras peut être considéré comme redondant
géométriquement dans le cas où la situation de l'OT
est A=[XOT].
III.9.2.Paramétrisation des plateformes à
roues
Pour ce type de systèmes, l'aspect de configuration et
situation est moins évident que celui des chaînes
cinématiques ouvertes, car un système mobile ne contient pas
d'organe terminal OT à proprement dit, ayant comme fonction
l'interaction avec l'environnement, mais pour sa part, il est composé de
roues qui contribuent au mouvement du système.
Pour une plateforme mobile à roues évoluant sur un
sol lisse, le vecteur zrp du repère RP
est
normal à la surface d'évolution de la
plateforme. Nous partirons de l'hypothèse que les bases mobiles à
étudier doivent avoir au moins 3 roues, qui sont nécessaires pour
la locomotion et l'équilibre d'un tel système.
Grâce à leur particularités, les robots
mobiles à roue peuvent se mouvoir dans des espaces assez importants, ils
sont aussi aptes à s'orienter ; alors, la situation (expression plus
favorable à « coordonnées opérationnelles ») de
ce type de systèmes est complètement décrite par deux
paramètres de positions et un d'orientation. Elle est donc
définie sur un espace noté EOP de dimension
u égale à 3. Soit RP(Op,x
p , y p )
r r le repère mobile lié à la plateforme
tel que zr et
|
r
zP
|
soient colinéaires ; les paramètres XP et
YP, coordonnées du point OP (origine du repère
RP
|
dans RA) et á (angle se trouvant entre
les axes xr et xrp) forment ainsi les
composantes du vecteur Ap= [XP YP
á]T situation du véhicule mobile.
Le choix du point OP est libre, mais (d'après
Campion [Pad05]), il peut être fait judicieusement en fonction du type de
plateforme mobile à roue envisagée.
Dans le cas d'un véhicule de type voiture, le choix est
illustré par la représentation en fig.III.3 d'après
[Pad05]:
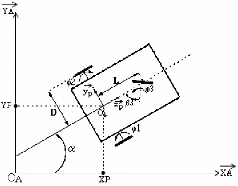
Fig III.3 : Paramétrisation d'une plateforme
mobile de type voiture
La configuration d'une plateforme mobile à roues est
connue lorsque sa situation dans le repère RA est connue, et
que la configuration de chacune de ses roues est connue ; la formulation de
cette configuration est étroitement liée à la
catégorie à laquelle appartient la roue.
Les coordonnées généralisées pour
une plateforme à roue sont alors complètement décrites,
sur un espace EP, par un vecteur de dimension np
dépendant du nombre et du type de roues considérées.
Les roues existantes pour la plateforme à étudier
sont :
Une roue centrée orientable, placée sur l'axe
longitudinal du véhicule et deux roues fixes se trouvant sur le
même axe à l'arrière (les roues sont
numérotées), où â3 désigne
l'orientation de la roue directrice avant, ?1 , ?2 et
?3 représente quand à elles, les angles de rotation des
roues droite, gauche, et de la roue directrice, ce qui donnera ? =
[?1 ?2 ?3]T.
La configuration du système mobile est alors :
1
?
?
?
?
?
?
á ?
J
q p
?
?
?
?
A p
â3
? 1
?
?
J
â3
?1
? 2
?3
Xp
Yp
Le tableau ci-dessous présente les paramètres
liés aux roues considérées en nous referant au tableau
présenté au chapitre I (paragraphe I.3.1) [Bay01]
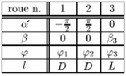
Tab.III.1 : Paramètres des roues de la
plateforme de type voiture
Les véhicules mobiles sont des systèmes
mécaniques caractérisés par l'existence de contraintes
cinématiques non holonomes, lesquelles sont une conséquence de
l'hypothèse de roulement sans glissement de leurs roues sur le sol,
habituellement adoptée pour la modélisation du contact roue/sol,
c'est la raison pour laquelle nous allons expliciter dans notre exemple cette
notion.
Les conditions de r.s.g des roues sur le sol conduisent donc
à une vitesse du point OP, portée
sur l'axe
xrp , en considérant v comme la vitesse
longitudinale de la plateforme et ù sa vitesse
angulaire, on a :
v= x&.Cos(á)+ y
& . Sin ( á ) (3.8)
ù=á& (3.9)
Comme il a été expliqué
précédemment, pour représenter les contraintes de
roulement sans glissement des roues sur le sol, il faut exprimer la
nullité des vitesses des différentes roues :
· Roues fixes droites et gauches
La nullité des vitesses dans les plans verticaux
perpendiculaires aux roues :
? r - ? 1
R
T ( ) 0
á A p =
0 1 0
L J
0 1 0
Sachant que R(á) représente la
matrice de rotation du système mobile, il résultera de
l'équation l'expression suivante :
& xSin(á)+ &yCos(á)
=0 (3.10)
On peut combiner les trois expressions précédentes
(3.8), (3.9), (3.10) pour avoir :
|
r i r + i
v xCos( ) ySin( )
& &
á á
? ? ? ?
0 xSin( ) yCos( )
= +
& &
á á
? ? ? ?
? ? ? J ? ? ? J
ù á &
|
=RT(á)A& p (3.11)
|
La nullité des vitesses dans les plans verticaux des roues
s'écrit alors (d'après l'équation (3.6)) :
v+Dù+r?&1 =0
-v+Dù+r?&2 =0
|
En combinant ces deux expressions en forme de matrices, on aura
:
? 1 r 1 r 1
1 0 0
D r ? & 1
? ? + ? ? ? ? =
R A
T ( ) 0
á
1 0 0
D r
p
?- ? L ? ? ?
? & 2
|
(3.12)
|
· Roue centrée orientable
La nullité des vitesses dans le plan vertical
perpendiculaire à la roue :
[Cos(â3)
Sin(â3) L Sin(â3)]
RT(á)A& p =0 (3.13)
La vitesse exprimée dans le plan vertical de la roue est
:
[-Sin(â3) *
LCos(â3)] RT(á) A& p
+r?& 3=0 (3.14)
Où * représente une valeur quelconque
Les contraintes de roulement sans glissement seront
présentées en réunissant les différentes
équations précédentes (3.11), (3.12), (3.13), (3.14)
J1(â3)RT(á)A&
p +J2?& =0 (3.15)
C1(â3)RT(á)
A& p =0 (3.16)
Avec :
? 1
1 0 D
J1( 3) 1 0 D
? ?
â = -
?
? ?- ? ?
Sin( 3) * LCos( 3)
â â
? 1
r 0 0
(3.18)
(3.17) , J2 0 r 0
? ?
= ? ?
? ? ? ]
0 0 r
? -
0 1 0 1
?
C1( 3) 0 1 0
?
â = ? ?
? ?
? Cos( 3) Sin( 3) LSin( 3)
â â â ?
(3.19)
Une plateforme mobile ne peut pas être
modélisée géométriquement, car, dans ce cas, sa
situation peut être quelconque dans le repère de
référence RA ; cela rend donc cet aspect peu
intéressant, c'est la raison pour laquelle nous entamerons directement
le modèle cinématique de notre plateforme.
· Modèle cinématique
Avant d'entamer la mise en oeuvre du modèle
cinématique, nous devons connaître le degrés de
mobilité du système mobile, il sera calculé relativement
au rang de la matrice
C1(â3).
Nous pouvons déjà remarquer de l'expression
(3.16) que RT(á) A& p doit
appartenir au noyau de
C1(â3), et de ce fait, sa dimension
dim(Ker(C1(â3))) est égale à 1, ce qui
représente le degré de
mobilité du système
mobile. Nous devons donc calculer une base ayant comme dimension
Ddmp
x3, elle peut être égale à [-LSin(â3) 0
Cos(â3)]T d'après [Bay01] ou encore
[Sin(â3) 0
- Cos(â2 ) T
' ] ' d'après [Pad05].
L
Donc, toujours d'après (3.16), le modèle
cinématique en situation d'une plateforme mobile de type voiture doit
être calculé selon le type de noyau choisi tel que :

Cos(á
[
- LCos(á
)Sin(â3 )
&
)Sin(â3 )
- LSin(á
(3.21)
Sin(á )Sin(â
3
)
Ap
Ap
Cos(â3)
Cos(
â3
)
J
1
)Sin(â3 )_,
L
(3.20) ou
Le modèle cinématique en situation de la
plateforme mobile relie la dérivée de la situation de la
plateforme à çp (commande de mobilité
de notre système mobile), avec çp vecteur
ayant comme dimension Ddmpx1 (Ddm, étant le
degré de mobilité du système).
Dans l'expression (3.20) et (3.21),
çp correspond à la vitesse linéaire de
la roue centrée orientable dont la direction est perpendiculaire
à l'axe de la roue, cette vitesse linéaire est égale
à vP= r.
?&3
On note que les composantes du vecteur
)1p sont toutes liées au paramètres
çp, pour ce qui est
de â3, c'est une entité qui a la
capacité de varier librement, c'est pour cela qu'elle va être
considérée lors de la mise en oeuvre du modèle
cinématique en configuration du robot mobile comme suit :

(3.22)
r-
1 1
1
J

Cos(63 :in:)) 01
1
ouD Cos(6
r
- L )
3
3 ))

1 Lr 000 r L 0 Co-s( Cao
L3r1s)03(a+)63)


3 0 00â3i
3 3

0 00 7p:11
Sin(a oins(a)36; )
0

0 1JJ


(LSin
6 a

r
3)-DCos
(fl
&
?1
&
?2
&
?3
&
X
p
&
Y
p
&
a
&
63
?
?
1 ? ? ? ? ? ?
J
L
&
qp
3(LSin
(J
3)+DCos
6a
))3LCos(aCos(6-LSin(aSin(
(J
(fl

Cos


)01Mat1))
))
((

1D


Mat2
Nous avons pu remarquer que le modèle cinématique
en configuration lie la dérivée de la
configuration du système mobile au vecteur de commandes ?
ç p â 3
& T , appliqué à la
? ?
plateforme mobile, il est de dimension 2. En d'autres termes,
nous pouvons déduire qu'il nous faut deux moteurs pour pouvoir commander
le mouvement d'un tel système, cela fait apparaître la
nécessité de motoriser l'orientation de la roue orientable.
Le choix du type de modèle cinématique (en
configuration ou en situation) pour un système mobile influe sur le
résultat de la modélisation des manipulateurs mobiles.
Nous avons remarqué que le modèle
cinématique du bras est mis en oeuvre en prenant en considération
seulement ses caractéristiques propres (type de liaison
qb1 et qb2 et longueur des segments
a1 et a2). Pour un robot mobile, nous avons constaté que son
modèle cinématique était plus délicat à
mettre en oeuvre, et n'était pas aussi systématique, cela est
dû aux contraintes de roulement sans glissement des roues sur le sol qui
sont calculées selon le type de roue à traiter.
Les calculs du degré de mobilité des plateformes
mobiles à roues ont été présentés en
détails dans [Pad05] et [Bay01].
Nous allons dans ce qui suit passer à l'étude des
manipulateurs mobiles à roues.
III.9.3. Etude d'un manipulateur mobile à roues
La configuration d'un manipulateur mobile à roues est
connue, dés lors que les configurations de la plateforme et du bras
manipulateur qui la composent sont connues.
Elle est définie sur un espace EGE
de dimension í=nb+np (nb
est la dimension de l'espace des configurations du bras et
np la dimension de l'espace des configurations de la
plateforme) par un vecteur q tel que :
? 1
q
q b
= ? ?
? ?
q p
Comme pour les bras manipulateurs, la situation d'un organe
terminal pour un manipulateur mobile est égale au minimum à 6,
dans un espace tridimensionnel.
Il est plus intéressant de choisir un bras manipulateur
tel que la taille de son espace opérationnel u soit
égale au nombre de coordonnées opérationnelles du
système complet.
Cela revient à considérer que si la plateforme est
amenée à ne pas bouger (selon la mission exigée), le
système sera tout de même apte à réaliser la
tâche désirée [Pad05].
Nous allons dans ce qui suit expliciter les notions
fondamentales pour une paramétrisation correcte du manipulateur mobile
à étudier. Le bras manipulateur considéré est de
type double pendule horizontal (les deux axes de rotations sont verticaux et
perpendiculaires au plan d'évolution de la plateforme RP
(Op, x p , y p
)
r r ) ; la plateforme quand à elle est de type voiture.
Chaque partie du robot résultant de la combinaison a été
présentée seule auparavant pour une
? q Ò
b 2
q ou
? ?
= X P
? ?
Y
? P Ò
? ? á J ?
? q b 1 1
1
1 Ò
?
?
?
?
?
?
?
?
J
qb
qb
2
? 1
? 2
?3
XP
YP
á
â3
meilleure compréhension. Le manipulateur mobile auquel
nous nous intéressons est présenté dans la figure
Fig.III.4 [Pad05]:
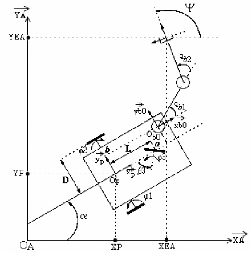
Fig.III.4 : Représentation d'un manipulateur
mobile plan
Dans le cadre de notre étude, le manipulateur mobile se
présente comme plan, et évoluant dans un espace à deux
dimensions, nous décrivons la situation de l'OT comme : A
=[A1 A2 A3]T=[XEA YEA Ø]T,
ces coordonnées opérationnelles seront toujours
considérées dans
RA= (OA ,x A ,
yA)
r r , elles spécifient les deux
coordonnées cartésiennes ainsi que l'orientation de l'OT
avec u=3 représentant la dimension de l'espace
opérationnel dim(EOP)=3.
En considérant les coordonnées
généralisées qb=[qb1 qb2]T du
bras manipulateur, et si nous ne nous intéressions qu'à la
situation qp=[XP YP á]T de la
plateforme (en omettant d'évoquer les rotations des différentes
roues), alors, le degrés de liberté du système
considéré estí=2+3=5 ; cette
représentation est aussi appelée configuration réduite du
système. Par contre, au cas où notre intérêt se
portait sur la configuration de la plateforme mobile
qp=[?1 ?2 ?3 XP YP á â3]T,
l'espace des configurations EGE serait donc de dimension
í=2+7=9.
Les différentes configurations envisagées pour le
système complet sont les suivantes [Bay01] :
Une ambiguïté peut se présenter dans le
fait d'utiliser la configuration ou la situation du système mobile, car,
pour considérer la configuration d'un système de manipulation
mobile, on peut ne considérer que la situation du système mobile
; elle peut être suffisante pour pouvoir identifier le système,
mais elle peut présenter des lacunes lors du passage à
l'étude de la commande. D'un point de vue purement
géométrique, la situation de la plateforme suffit pour identifier
le système de manipulation mobile dans le plan
RA=(OA,xrA, fIA), cela
transparaîtra plus clairement lors de la construction des
modèles géométriques comme suit.
·
Modèles géométriques
Pour notre système qui se présente comme plan, le
modèle géométrique direct est le suivant :
A1=XEA=
Xp+aCos(a)-bSin(a)+a1Cos(a+qb1)+a2Cos(a+qb1+qb2)
(3.23)
A2= YEA= Yp+
aSin(a)-bCos(a)+a1Sin(a+qb1)+a2Sin(a+qb1+qb2)
(3.24)
A3=Pr=qb1+ qb2+ a (3.25)
Il n'y a pas de lois particulières pour inverser le
modèle géométrique d'un manipulateur mobile.
Nous pouvons déjà certifier que le modèle
géométrique inverse comporte une infinité de solutions
puisqu'il présente une redondance géométrique ; cela
apparaît dans le fait que le nombre de coordonnées
généralisées soit supérieur au nombre de
coordonnées opérationnelles (v>p). L'ordre de cette
redondance géométrique est v--p=5-3=2.
Sachant que les coordonnées du point
Ob0 sont (a, b) dans le repère
Rp=(Op , xp , yp ) ; en
supposant que a=0 et b=0, et en
remplaçant (3.25) dans (3.24) et (3.23), elles se transformeront en :
A1=Xp+a1Cos(a+qb1)+a2Cos(A3)
A2= Yp+a1Sin(a+qb1)+a2Sin(A3) On
aurait donc :
A 1-Xp-a1Cos(A3)=
a1Cos(a+qb1) (3.26)
A2-Yp-a2Sin(A3)=a1Sin(a+qb1)
(3.27)
En faisant l'opération mathématique
((3.29)2+(3.30)2) on aura:
(A1-a2Cos(A3)-Xp)2+(A2-a2Sin(A3)-Yp)2=a1
2 (3.28)
Cette expression représente une contrainte par rapport
à certaines coordonnées
généralisées,
puisque le choix des deux
coordonnées Xp et Yp doivent la satisfaire
; ainsi, en fixant Xp, on
peut déduire YP. D'autre part, les
coordonnées généralisées á et
qb1 présentent une infinité de solutions, puisque dans
les expressions (3.23) et (3.24), nous avons remarqué que l'on ne
pouvait pas les dissocier, car on ne les retrouve que sous la forme (á
+qb1).
Ceci étant, si le choix du couple (Xp,
Yp) et á a été accompli, alors, nous
calculerons qb1 et qb2 comme suit :
qb1=arctan2(A2-a2
SinA3-Yp ,
A1-a2CosA3-Xp)-á
qb2=A3-arctan2(A2-a2SinA3-Yp
, A 1-a2CosA3- Xp)
Par conséquent, l'ensemble des configurations [XP
YP á]T (représentants celle de la plateforme) qui
sont solutions du MGI, pour une situation imposée A=[A1 A2
A3]T de l'OT dans RA= (O A ,x
A , y A )
r r forment un cylindre
Sp(A) défini par l'équation (3.28) , ceci
implique
que pour chaque point de Sp(A), il existe une
paire (qb1,qb2) pour laquelle la situation de
l'OT dans RA est [A1 A2 A3]T.
Dans ce qui suit, nous allons construire le modèle
cinématique, où nous mettrons en évidence l'utilité
de la configuration du système mobile.
· Modèle Cinématique
En considérant que les coordonnées du point
Ob0 (a,b) sont quelconques, le modèle cinématique
direct de notre robot manipulateur mobile sera dit réduit, à
cause des contraintes non holonomes qui se présentent par rapport
à la plateforme mobile.
Nous avons évoqué précédemment le
modèle différentiel direct réduit, il est défini
comme étant l'application linéaire J telle que :
A&=J.p &
La mise en oeuvre de ce type de modèle est
étroitement liée aux contraintes non holonomes. Pour notre
plateforme mobile, les différentielles de la situation de la plateforme
[X& P Y & P á
& ]T sont dépendantes, elles sont liées par
çp. On peut faire intervenir une forme
différentielle p&
dont le nombre de composantes qui sont indépendantes
correspond au degré de mobilité du
système
mécanique. Il suffit de choisir : p& =
[p&1 p&2 ... p&Ddm ]T , le
choix des composantes du
vecteur p& est lié au type de bras et de
plateforme à traiter, donc, pour notre système, nous
considérons que le degrés de mobilité du manipulateur
mobile étudié est :
Ddm=Ddmp+ Ddmb =1+2=3.
Nous allons donc avoir : p& =[
p& 1 p&2
p & 3 ]T=[ q & b1 q &
b2 ç p ]T .
Le modèle cinématique en situation de notre
manipulateur mobile lie le vecteur des vitesses
opérationnelles
A& , aux vitesses généralisées du
bras ( q & b1 , q & b2) ainsi qu'à la
commande de
mobilité çp de la plateforme.
La matrice jacobienne réduite va être représentée en
considérant le modèle cinématique en situation de la
plateforme selon l'équation (3.2 1)
Le représentation p &nous mène
à calculer le modèle différentiel réduit, qui est
présenté dans ce qui suit où J(q b1, q b2
,á,â3) représente la matrice jacobienne réduite
de notre système :
|
?
?
?
?
?
|
&
A1
&
A2
&
A3
|
1
?
?
? J
|
J11
J21
1
) Ò ?
? J
? ?
? ?
? ?
? ?
&
qb1
&
q b2
çp
1 ? ?
? J
)
|
a S( q )
á +
1 b1
|
J a S( q q ) S(
12 2 b 1 b2 3
- á â
|
)C(á
|
)
|
C( )
â
+ +
3 (aS( )
á
L
|
bC(á
|
)
|
? C( )
â
= a C( q ) J a C( q q ) S( )S( )
+ - - +
3
1 b1 22 2 b1 b 2 3
á á â á (aC( ) bS( )
á á
? L

C()
â 3
1 1
L
J
(q q , )
b 1 b2 3
, , á â
Sachant que S représente le sinus et
C représente le cosinus, S(áqb1) et
C(áqb1) sont les sinus et cosinus de l'angle
(á+qb1), ainsi que
S(áqb1qb2) et
C(áqb1qb2) qui sont les sinus et cosinus de l'angle
á+qb1+qb2.
En étudiant la matrice J(q b 1 , q b2
,á,â3), nous remarquons que le degré de liberté
global de
notre système vaut uddl=3, il est
considéré comme non redondant cinématiquement puisque
Ddm-uddl=0. Si le choix des coordonnées
opérationnelles se portait uniquement sur les coordonnées en
position [XEA YEA]T, alors, uddl=2, ce
qui impliquera que le degré de redondance cinématique est
Ddm-uddl =1.
Le déterminant de la matrice jacobienne réduite est
:
a 1
Det( J(q b1 , q b 2 , á , â
3 ) )= -
(-aCos(â3)Sin(qb1)+LSin(â3)Cos(qb1)+bCos(â3)Cos(qb1)).
L
Le calcul du déterminant nous aide à
détecter les singularités du système à
étudier, cela se fera en considérant Det( J(q
b1 , qb2 ,á,â3 ) )=0. Nous remarquons pour notre
système que la détection des singularité se fera en
analysant les valeurs des variables liées au système telles que
a, b et L ; plusieurs cas se présentent :
b
-Si a=0 alors
LSin(â3)Cos(qb1)+bCos(â3)Cos(qb1)=0
â3=atan(- ) ou qb1 = ð +kð
(k? N).
L 2
-Si L=a et b=0,
Sin(â3)Cos(qb1)-Cos(â3)Sin(qb1)=0
â3=qb1+ kð(k? N).
Ces deux cas présentés sont les seuls
détectés analytiquement, les autres ne peuvent pas
apparaître aussi automatiquement, il faut user de méthodes
numériques pour déceler l'existence et les valeurs des
configurations singulières, en imposant les valeurs a,
b et L.
Pour ce qui est du modèle cinématique en
configurations, il sera déduit du modèle cinématique en
configurations de la plateforme comme suit :
&
qb
1
&
qb
2
&
?1
1 ? ? ? ? ? ? ? ? ?
? J
&
1
?
?
?
?
?
?
?
?
?
?
?
?
?
? J
0
Cos (â 3
)
-
0 0
0 0
Cos (â) Sin(â
3 3
-
r
0 0 Cos( )Sin(
á â 3
0 0 Sin( )Sin(
á â 3
L
0 1
10
01
1
D
(
00
L
r
1
D
(
00
L
r
00
Cos(â
3 3
) Sin(â
+
1
&
qb1
&
2
qb
çp
&
1
?
?
?
?
J
â3
00
00
)
)
))
))
0
0
0
0
0
?2
&
?3
&
Xp
&
Y p
&
á
&
â3
La paramètrisation des systèmes a son
importance, surtout par rapport au choix des coordonnées
opérationnelles (de la tâche) ; c'est un point
prépondérant car il influe sur la redondance. Cette
caractéristique peut aussi se révéler grâce à
l'ajout de la plateforme puisque pour le système de manipulation mobile
étudié, elle y est apparue (redondance
géométrique), alors qu'elle n'y avait pas existé
auparavant pour le système articulé seul. Cela implique que
l'ajout d'un véhicule mobile influe aussi sur le facteur de redondance
géométrique. De ce fait, nous pouvons déduire que
l'étude d'un manipulateur mobile diffère totalement de celle du
système articulé seul.
La construction de la matrice jacobienne d'un manipulateur
mobile est particulière, cela est dû principalement à la
cinématique du système à roues ; elle comprend dans sa
constitution les contraintes de roulement sans glissement qui changent d'un
type de plateforme à l'autre. Elle est également facteur de la
matrice partielle incluse par les vitesses articulaires du bras
embarqué.
Les calculs des différents modèles de
transformations d'espaces présentés dans ce chapitre se font en
suivant certaines règles générales pour un système
mobile quelconque, portant un type de bras ayant une structure à
chaîne cinématique ouverte, sans soucis du type d'articulation
qu'il comporte, ces principes de bases seront présentés dans le
prochain chapitre.
III.10. Conclusion
Nous avons abordé dans ce chapitre différentes
définitions relatives à des principes en manipulation mobile, en
concrétisant ces aspects purement théoriques par une illustration
d'exemples : un système articulé, un robot mobile et un
manipulateur mobile composé des deux sous systèmes
présentés auparavant.
Nous allons nous consacrer dans le prochain chapitre à
l'étude de l'aspect modélisation, en présentant des
formules générales de calcul. Grâce à cette
étude, nous allons tenter de faire une planification de mouvement dans
l'espace généralisé en nous imposant un mouvement
opérationnel, ce qui nous incitera à utiliser les modèles
inverses.
Chapitre IV
Modélisation
IV.1. Introduction
Les bras manipulateurs présentent la
spécificité d'avoir des limites dans leurs mouvements à
cause de leur morphologie, puisque contraints par le nombre d'articulations
qu'ils comportent, ainsi que la longueur des segments dont ils sont
composés ; ils révèlent de ce fait des limites qui peuvent
paraître dans la forme de leur volume de travail. Les robots mobiles
quand à eux ont la particularité de se mouvoir dans des espaces
assez importants, mais leur inconvénient majeur réside dans leur
incapacité à interagir avec l'environnement.
Une des solutions pour pallier aux défauts des deux
systèmes est le fait de les combiner pour construire un nouveau
composant qui est le manipulateur mobile.
Le but d'utilisation d'un système
représenté par une chaîne articulée embarquée
sur un véhicule, est d'opérer grâce à l'organe
terminal dans un grand espace, mais il peut présenter un problème
des plus récurrents, qui se base sur l'aspect planification de
trajectoire et de mouvement. Cette caractéristique est
étroitement liée à la modélisation, puisque nous
nous devons de générer une trajectoire et un mouvement en nous
aidant des différents modèles géométrique et
cinématique.
Dans le cadre de notre étude, le système
articulé seul est redondant vis à vis de la tâche
imposée, alors que la plateforme est non holonome. Le robot que nous
allons étudier exécute des Tâches à Mouvement (et
Trajectoire) Opérationnel(le) Imposé(e) ; pour ce cas
particulier, des problèmes subsistent car :
-L'intrusion du robot mobile (quel que soit son type) induit
dans la majorité des cas une redondance, qui rend le problème de
modélisation compliqué à résoudre; la plateforme
mobile peut avoir une infinité de situations pour une configuration fixe
du bras manipulateur, comme cela est représenté en Fig.IV. 1.
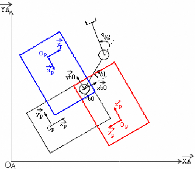
Fig.IV.I. Influence de la configuration de la plateforme
sur la redondance du manipulateur mobile
-Les systèmes non holonomes présentent
l'inconvénient que certaines trajectoires ne soient pas faisables.
-Le nombre important de coordonnées et vitesses
généralisées du bras relativement à la tâche
opérationnelle imposée ajoute des degrés de liberté
au système déjà redondant.
Nous allons dans une première partie de ce chapitre
commencer par présenter le modèle géométrique
direct en procédant de deux manières différentes. La
seconde partie aura trait au modèle géométrique inverse,
qui consistera en une proposition de solution de planification de mouvement de
la plateforme en prenant en considération les contraintes non holonomes,
de sorte à faire suivre la trajectoire opérationnelle
imposée à l'organe terminal. Ensuite, nous entamerons
l'étude de la cinématique du système par la description du
modèle direct de notre manipulateur mobile ; et enfin, le dernier volet
de ce chapitre sera consacré à l'étude du modèle
cinématique inverse, où nous présenterons la
méthode des tâches additionnelles, qui s'accorde conjointement
avec la méthode d'inversion du modèle géométrique
proposée.
Dans tous les modèles que nous allons présenter
dans ce chapitre, nous commencerons par traiter du cas général
d'un bras manipulateur comportant n variables articulaires,
porté sur une plateforme mobile non holonome, pour terminer par
l'étude du cas particulier de notre système.
IV.2.Présentation du système à
étudier
Nous nous somme intéressé à
l'étude d'un système robotique comportant un bras manipulateur
redondant géométriquement vis à vis de la tâche,
celle ci doit s'exécuter dans un espace à trois dimensions. Notre
choix s'est porté sur le bras Mitsubishi PA10 7CE ; la plateforme mobile
quand à elle est un véhicule de type voiture.
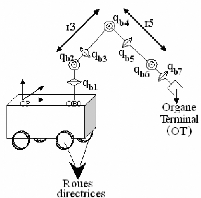
Fig.IV.2. Présentation du manipulateur
mobile
Connaissant le bras manipulateur et la plateforme mobile sur
lesquels nous devons opérer, le système combiné est
présenté en Fig.IV.2 [Nen04] [Xu05] ; La plateforme mobile est
non holonome de type voiture comportant 2 roues directrices se trouvant
à l'avant, et deux roues arrières pour stabiliser le
système, le bras embarqué sur la plateforme mobile se trouve au
centre de l'axe des roues avants, il comprend 7 articulations rotoïdes ;
les paramètres présentant la géométrie de ce
système articulé sont exposés en Annexe C.
IV.3.Modèle géométrique direct
Le modèle géométrique direct d'un
système quelconque représente des fonctions grâce
auxquelles les coordonnées opérationnelle sont liées au
coordonnées généralisées.
La situation A=[A1 A2 A3 A4 A5 A6]
T de l'OT présentée dans un espace
opérationnel à trois dimensions pour un manipulateur mobile
portant un seul bras manipulateur, est fonction de sa configuration,
représentée par les coordonnées
généralisées des différentes articulations
Ang=[qb1.....qbn]T et les
coordonnées propres à la plateforme, telles son orientation
á ainsi que les coordonnées cartésiennes [XP
YP] d'un point de référence OP.
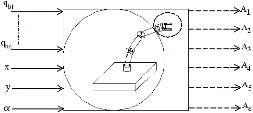
Fig.IV.3. Modèle géométrique
direct
Nous nous proposons de présenter deux méthodes de
calcul du modèle géométrique direct pour un manipulateur
mobile.
Remarque
Dans les parties suivantes, nous allons considérer
Cá comme représentant le cosinus de l'angle
á, et Sá comme étant le sinus de l'angle
á, aussi, nous définissons tgá comme la
tangente de l'angle á; aussi, arcCá est la
fonction arc cosinus le l'angle á,
IV.3.1. Matrices de passage
Ce procédé consiste à calculer le
modèle géométrique direct du manipulateur mobile en
utilisant des matrices de transformation d'espaces [Yam94] [Xu05].
Le système de repérage est présenté
en Fig.IV.4, où nous pourrons distinguer 3 repères de
référence qui sont :
· Repère absolu
Il est présenté comme RA= (OA , x
r A , y r A , z r A), c'est le repère de
référence dans lequel
doivent être représentées les positions de
l'organe terminal, à savoir, A1, A2 et
A3
respectivement selon les axes xrA,
yrA et zrA, ainsi que ses orientations
A4,A5 et A6 selon les trois
axes de référence précédents.
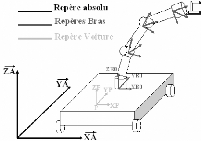
Fig.IV.4 : Représentation des repères
pour un manipulateur mobile
Le repère RA est choisi orthonormé,
direct, fixe, et tel que l'axe zrA est normal à la
surface sur laquelle évolue la plateforme à roues [Pad05]
· Repère plateforme
Le robot mobile doit avoir un repère RP=
(OP, x r P , y r P , zr P ) ; ce
repère sera représenté dans RA par la position
XP et YP de son origine OP, ainsi que par
l'orientation de ses axes á.
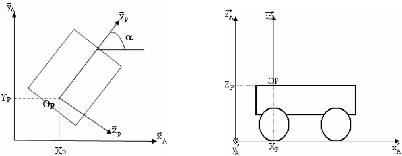
(a) (b)
Fig.IV.5 : représentation du repère
plateforme : (a) Vue de Dessus, (b) Vue de Profil
La matrice de transformation ATP
exprime la position et l'orientation du repère RP par rapport
au repère absolu RA comme suit :
Cá
S á
0
0
|
- S 0
á
á
C 0
0 1
0 0
|
X P
Y
P
Z P
1
|
|
A
?
T = ? P ?
?
· Repère Bras
Le repère RB0= (OB0 x B0 y
B0 z B0 )
, r , r , r se trouve à
la base du bras, alors que les repères des
différentes articulations se succèdent
jusqu'à atteindre celui de l'organe terminal (Fig.IV.4).
C'est dans RB0 que vont être
calculées les coordonnées opérationnelles de l'OT
; ces calculs donneront le modèle géométrique direct du
bras manipulateur, qui est défini comme étant la procédure
qui exprime la relation entre les coordonnées opérationnelles
[XE YE ZE Ø È Ö] T et les
différentes variables articulaires [qb1..
..qbn]T, il en résultera une matrice de
transformation d'espace B0TBn (dans le cadre de notre
étude la matrice de transformations d'espaces sera
B0TB7).
Nous avons considéré que l'illustration de ce
modèle était inutile dans ce paragraphe, car son
élaboration a été une procédure couramment
exposée et très souvent mise en oeuvre ([Khl99] [Yam94], [Gor84],
[Dao94], [Vib87]) ; par conséquent, pour plus d'éclaircissements,
nous préférons ramener le lecteur vers l'Annexe A. Nous
considérons que le vecteur [XE YE ZE]T illustre les
positions cartésiennes de l'organe terminal selon les axes x r
B0, y r B0 et z r B0, et
[Ø È Ö ]T étant
la représentation non redondante des angles de rotation d'Euler [Bay0 1]
[Khl99], selon les trois axes précédemment cités. Les
coordonnées de l'origine OB0 du repère bras dans RP
sont a' selon l'axe xrP et b' selon
l'axe yrP. La matrice PTB0 exprime la
situation de OB0 dans le repère (OP, x r
P, y r P , zrP)
E1 0 0 a'l
P (4.2)
? 0 1 0 b' Ò T B 0 = ? 0 0 1 0
Ò
? ? 0 0 0 1 Ò ÿ
Finalement, du produit matriciel de l'équation (4.2)
résultera la matrice de transformation
d'espace ATBn.
ATBn = AT P .
PTB0 . B0T Bn
(4.3)
Grâce à la matrice de transformation d'espace
ATBn, nous pourrons déduire la position et
l'orientation de l'organe terminal par rapport au repère absolu
RA. Le calcul des différentes coordonnées
opérationnelles A=[A1 A2 A3 A4 A5 A6]T se
fera donc directement d'après la description des matrices de passage en
Annexe A.
IV.3.2. Calcul direct
Cette approche consiste à calculer
immédiatement le modèle géométrique direct par des
expressions analytiques [Fou98] [Bay0 1], en suivant le système de
repérage présenté en Fig.IV. 6.
Nous pouvons déduire de cette représentation
que pour un manipulateur mobile quelconque, les valeurs des coordonnées
en position A1, A2 et A3 sont étroitement
liées à la configuration de la plateforme [XP YP
á]T, cela ajoutera par conséquent trois
degrés de liberté au système articulé, et
contribuera donc à créer une redondance
géométrique. Les orientations A5 et A6 ne
changent pas en incluant la plateforme, alors que la rotation á
contribue à faire varier la valeur du paramètre
A4.
r r
r r et (OA ,x A , zA)
Fig.IV.6 : représentation des repères
dans les plans (OA ,x A ,yA)
Les différentes expressions résultantes sont :
|
A1=XEA=XP + (a
'+XE)Cá - (b '+YE) Sá
|
(4.4)
|
A2=YEA=YP +
(b'+YE)Cá+(a'+XE)Sá
|
(4.5)
|
A3=ZEA=ZE+ZP
|
(4.6)
|
A4=Ø+á
|
(4.7)
|
A5=È
|
(4.8)
|
A6=Ö
|
(4.9)
|
|
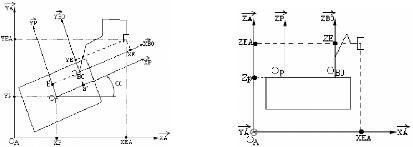
Le modèle géométrique direct d'un
manipulateur mobile représente donc le fait de considérer la
situation de l'organe terminal dans le repère absolu RA ; pour
le système que nous devons étudier, ce calcul fera appel à
sa configuration qcfg=[XP YP á qb1 qb2
qb3 qb4 qb5 qb6 qb7]T.
La méthode des matrices de transformations d'espaces
est une méthode qui fait appel à différentes matrices
relatives à chaque repère, cette approche nous illustre le
modèle géométrique direct par étapes, cela veut
dire que chaque repère se déplace relativement à un autre,
puisque RP est en mouvement par rapport à RA,
RB0 est considéré par rapport à RP, et
RBn se déplace relativement à RB0.
Cette approche est particulièrement structurée car elle est
très implicite en terme de représentation, et de vision
géométrique dans l'espace, dans le sens où la notion de
relativité apparaît grâce à la disposition des
matrices.
La méthode analytique est simple à
implémenter et rapide relativement au temps de calcul, elle
présente aussi un avantage lors du calcul du modèle
cinématique direct du système, car, pour la mise en oeuvre de la
matrice jacobienne, il est nécessaire de considérer les vitesses
en positions qui sont les dérivées temporelles des positions
cartésiennes ; pour les orientations, il suffit de calculer les vitesses
de rotations du système articulé, alors, les vitesses en rotation
du manipulateur mobile se déduiront très vite (pour plus de
détails concernant le modèle cinématique, voir le
paragraphe IV.5.). Cette méthode présente tout de même un
inconvénient majeur, car elle est attachée de trop prés au
système de repérage présenté en Fig.IV.4, et un
simple changement dans la disposition des repères implique l'utilisation
de manoeuvres mathématiques, pour pouvoir modéliser le
système, alors que la méthode des matrices de transformations
d'espaces est appropriée dans ce cas ; il ne suffit qu'à modifier
certains paramètres (dans les matrices de références
ATP, PTB0 ou
B0TBn), qui sont régis par des
règles
précises et des lois spécifiques, liées
à la définition même des matrices de transformations
d'espaces.
IV.4. Modèle géométrique inverse
Comme la définition de ce type de modèle le
stipule, le modèle géométrique inverse d'un manipulateur
mobile quelconque évoluant dans un espace tridimensionnel, a comme but
de calculer ses coordonnées généralisées [XP YP
á qb1. ..qbn]T, en fonction de la
situation imposée à son organe terminal [A1 A2 A3 A4 A5
A6]T dans le repère RA.
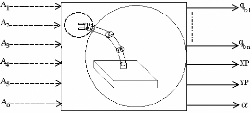
Fig.IV.7.Représentation du modèle
géométrique inverse d'un manipulateur mobile
Contrairement au modèle géométrique
direct, son inverse n'a pas de règles de calculs spécifiques,
donc, nous devons user de stratégies propres au type de systèmes
à étudier (le bras manipulateur et la plateforme mobile).
Dans le cadre de notre étude, la situation de l'organe
terminal ne sera représentée que par les coordonnées
cartésiennes [XEA YEA ZEA]T= [A1 A2
A3]T, alors, seule la sous chaîne Ang=[qb1
qb2 qb3 qb4]T responsable du positionnement de
l'OT est prise en compte[Nen04].
Le modèle géométrique inverse du
manipulateur mobile à étudier est donc représenté
schématiquement en Fig IV.8.
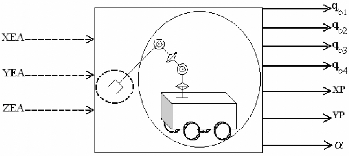
Fig.IV.8.Représentation du modèle
géométrique du manipulateur mobile à
étudier
Nous pouvons décréter de prime abord que le
manipulateur mobile à étudier est géométriquement
redondant, vis-à-vis de la tâche de suivi d'une trajectoire
opérationnelle imposée, compte tenue de la condition que le bras
manipulateur soit composé de quatre coordonnées
généralisées Ang=[qb1 qb2 qb3
qb4]T ; alors que nous avons une dimension de l'espace
opérationnel dim(EOP) égale à 3, ceci
inclut un degré de redondance géométrique égal
à 1. Le nombre de coordonnées généralisées
s'accroît en adjoignant la plateforme mobile ayant une situation
Ap=[XP YP á]T, avec une
dimension de l'espace opérationnel dim(EP)
égale à 3, dés lors, le degré de redondance
géométrique du manipulateur mobile
(dim(EP)+ 1) sera égal à 4. La
représentation du modèle géométrique inverse
(Fig.IV.8) fait apparaître cette redondance géométrique,
puisque le nombre de paramètres en entrée, exprimant la situation
imposée à l'organe terminal [XEA YEA ZEA]T,
dans le repère RA, est inférieur au nombre de
paramètres en sortie qcfg=[XP YP
á qb1 qb2 qb3 qb4]T , illustrant la configuration du
système complet.
· Problématique
Le modèle géométrique inverse est
délicat à mettre en oeuvre si la configuration
qcfg prise en compte est traitée globalement.
Puisqu'une trajectoire géométrique quelconque ne peut pas
être imposée au système mobile, sans considérer les
contraintes non holonomes, donc, une tâche qui exige un suivi de la
trajectoire par l'organe terminal du bras manipulateur, représente une
contrainte supplémentaire pour le système mobile, qui doit
constamment veiller à faire suivre à l' OT la
trajectoire exigée.
· Solution
Puisque les contraintes non holonomes ne transparaissent
qu'en traitant le système mobile cinématiquement, alors, cela
nous incitera à étudier le mouvement du véhicule
plutôt que sa trajectoire.
Nous allons proposer une solution découplant
partiellement le système: nous commencerons par planifier le mouvement
de la plateforme en prenant en charge les contraintes non holonomes, de sorte
à ce qu'elle puisse placer le bras manipulateur dans des zones, lui
permettant de suivre la trajectoire opérationnelle imposée, puis,
nous inverserons le modèle géométrique du bras
manipulateur en utilisant une méthode de calcul itérative pour
enfin placer l'OT dans la situation désirée.
IV.4.1. Planification de mouvement de la plateforme
mobile
Nous avons évoqué au préalable le terme
« trajectoire opérationnelle », mais nous nous devons de la
définir plus concrètement comme cela est présenté
dans ce qui suit.
IV.4.1.1. Définition de la Trajectoire
Opérationnelle Imposée
Une trajectoire opérationnelle est définie
comme étant un parcours se développant dans l'espace
opérationnel ; il est composé d'une succession de points assez
rapprochés pour représenter une trajectoire, cela est
réalisé dans le but de permettre à l'organe terminal du
bras manipulateur embraqué de suivre un chemin plus ou moins lisse.
Chaque point de cette trajectoire sera appelé «
échantillon ».
Chaque échantillon est décrit par ses propres
coordonnées C=[Xc Yc
Zc]T dans le repère
RA= (OA ,
x r A , y r A,z r A). La trajectoire
opérationnelle imposée prendra donc part aussi dans le
repère RA (Fig.IV.9), elle est
représentée par un certain nombre d'échantillons NECH
; le bras porté sur la plateforme se doit de les atteindre tous.
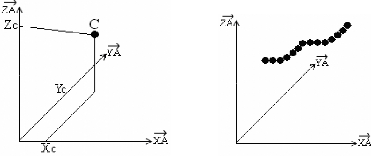
(a) (b)
Fig.IV.9 : Représentation de la trajectoire
opérationnelle :(a) Présentation d'un échantillon dans le
plan
r r r
(OA ,xA ,yA ,zA)
r r r , (b) Représentation d'une
trajectoire opérationnelle dans le plan (OA ,x A ,yA
,zA)
IV.4.1.2. Génération de trajectoire de la
plateforme
Dans l'approche que nous avons adopté, nous nous
sommes donné comme objectif premier de construire un chemin
prédéfini à la plateforme mobile, de sorte à
toujours faire suivre à l'organe terminal du bras manipulateur la
trajectoire opérationnelle imposée, en ramenant le bras dans des
postures grâce auxquelles les NECH
échantillons successifs exigés par la tâche (ayant comme
coordonnées [Xc Yc
Zc]T), puissent être atteints.
Une plateforme mobile à roues a comme
spécificité une aptitude à ne se mouvoir que dans le plan
(OA , x r A,y r
A), contrairement au bras manipulateur que nous voulons
étudier, qui a
la particularité de pouvoir atteindre des hauteurs
Zc relativement aux limites exprimées par la
longueur des segments dont il est composé[Xu05]. La solution que nous
avons proposé pour la planification de trajectoire s'attache à
ces caractéristiques, qui nous informent que, pour atteindre un
échantillon désiré C, il faut que le
véhicule soit placé de sorte à ce que le bras puisse
atteindre la hauteur désirée Zc ; pour
installer ce système mobile, il faut qu'une distance de
référence soit respectée entre la projection de
l'échantillon C dans le plan (OA , x
r A , y r A)
(qui est Cxy selon Fig.IV.10.) et la base du bras
OB0.
Pour un échantillon C=[Xc
Yc Zc]T quelconque, nous avons construit
une surface circulaire nommée « champ », pour
délimiter l'espace des positions auxquels doit appartenir le point
OB0 . Si la plateforme mobile rentre dans ce champ, cela signifie que
le bras peut atteindre l'échantillon désiré, sinon, il
faut faire rapprocher le véhicule davantage. Cela sera mieux
explicité schématiquement selon Fig.IV. 10.
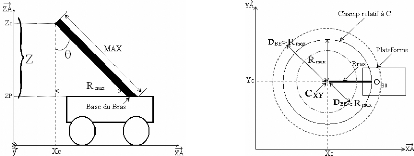
(a) (b)
Fig.IV.10. : Notations pour le calcul du champ relatif
à un échantillon prédéfinit pour un
manipulateur
mobile :(a) Vu de profil, (b) Vu de haut
Nous appelons champ, un cercle virtuel émis par
l'échantillon que le bras doit atteindre ; plus la hauteur
Zc augmente, et plus son rayon Rmax
diminue et vice versa.
Connaissant l'envergure maximale MAX du bras
manipulateur, ainsi que la hauteur désirée
Zc, alors nous pourrons calculer la valeur de
Rmax. Le calcul de cette distance sera
présenté en équations (4.10-4.12).
Z=Zc-ZP (4.10)
Z
è = arcC (4.11)
MAX
Rmax = Sè.MAX (4.12)
L'échantillon désiré C n'est
atteignable par le bras, que si le point de référence
OB0 rentre à l'intérieur du champ.
Considérant la distance DBE séparant la base
du bras de Cxy, sa valeur doit être inférieure ou
égale à Rmax (DBE= Rmax) d'après
Fig.IV.10.b.
Pour la planification de trajectoire, nous nous baserons sur
la construction de champs relatifs à certains échantillons
sélectionnés ; avant d'entamer cette phase, Nous devons nous
imposer des hypothèses de travail:
-La dimension de l'espace opérationnel est égale
à 3, car nous ne considérons que les coordonnées
cartésiennes.
-Le porteur du bras Mitsubishi PA10 7C comporte 4 liaisons
rotoïdes, ce qui donne un seul degré de redondance
géométrique pour le bras manipulateur [Nen04].
-La surface sur laquelle évolue la plateforme est lisse
et plane.
-Le manipulateur mobile évolue en espace libre (sans
obstacles).
-Le bras ne peut pas atteindre tous les échantillons ce
qui incitera le système de locomotion à être
sollicité.
IV.4.1.3. Planification de trajectoire
La planification de trajectoire du système mobile est
effectuée en générant une trajectoire, relativement aux
champs engendrés par les différents échantillons.
L'algorithme suivant relate les différentes étapes menant
à la construction de la trajectoire planifiée.
1-Soit T une trajectoire opérationnelle
imposée ayant comme nombre d'échantillons NECH 2-Soit
Dist une distance définie pour séparer chaque couple
d'échantillons.
3-Initialisation de k, Nbr,
Cp.
Tant que Nbr=NECH
A - Calcul des rayons Rk et RNbr
pour les champs liés à Ck et CNbr
B - Tracer en CNbr le segment PR
perpendiculaire à SCp segment liant Ck et
CNbr.
C - Définir le point d'interaction
PNbr entre le champ de rayon RNbr et
PR.
D - Connecter deux points PNbr et Pk
pour former la trajectoire planifié ôCp.
E - k=k+Dist
F - Nbr=Nbr+Dist
G - Cp=Cp+1
Sachant que dans la phase 3, k=1, Nbr=Dist et
Cp=1.
La figure IV. 11 illustre ces différentes étapes
de constructions de la trajectoire imposée au système mobile.
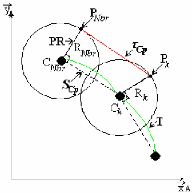
Fig.IV.11 : Planification de trajectoire de la
plateforme
Le résultat de cette planification de trajectoire
consiste en une succession de segments connectés de sorte à
former une trajectoire continue.
L'exemple présenté en Fig .IV.12.b. est une
illustration de l'approche de planification de trajectoire que nous avons mis
en oeuvre, la distance entre échantillons Dist étant
égale à 20cm.
La tâche imposée est le suivi d'une trajectoire
opérationnelle ayant la forme d'une ellipse
dans le plan(OA, x
r A,Y r A) selon Fig .IV.12.a . La hauteur
augmente de 1mm/échantillon, les
échantillons consécutifs sont distants de 1cm, la
hauteur du premier échantillon étant de 71.7cm.
Cette planification a comme but de placer le point de
référence OB0 de sorte que le bras
manipulateur puisse atteindre les échantillons imposés.
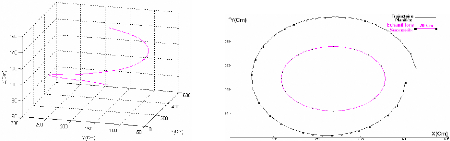
(a) (b)
FigIV.12 : Exemple d'une trajectoire
opérationnelle imposée : (a) Représentation de la
trajectoire
opérationnelle dans RA, (b) Résultat de la
planification de trajectoire
Nous pouvons constater que la trajectoire planifiée
s'approche progressivement de la
trajectoire imposée dans le plan
(OA , x r A , Y r A), cela est dû à
l'influence de la hauteur qui
s'accroît au fur et à mesure de
l'évolution de la trajectoire imposée. Au début, la
hauteur était de 71.7 cm, elle correspond à la plus petite
hauteur que le bras puisse atteindre (hypothèse que nous avons
émis), ce qui permet d'éloigner au maximum
OB0 du premier échantillon, par contre, puisque nous avons
incrémenté la hauteur au fur et à mesure de
l'évolution spatiale des échantillons opérationnels,
alors, le dernier échantillon sera le plus haut, et donc, la plateforme
devrait se mettre la plus proche de la trajectoire imposée.
IV.4.1.4. Planification du mouvement de la plateforme
Après avoir planifié la trajectoire de la
plateforme, en nous referant à l'information présente dans
l'espace opérationnel, nous allons générer le mouvement du
système mobile en considérant les contraintes non holonomes.
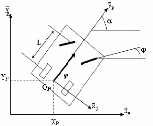
Fig.IV.13. : Représentation des
caractéristiques d'un robot mobile de type voiture
Le planificateur de mouvement utilisé a
été présenté par Latombe et Barraquand [Pru96] .Ils
ont proposé une solution qui repose sur l'idée qu'il existe une
trajectoire entre deux configurations, appartenant à un même
espace libre (pas contraint par des obstacles), si l'angle de braquage ?
prend au moins deux états pour une vitesse v
imposée qui est non nulle. Le planificateur consiste
à faire mouvoir le robot selon des sous trajectoires faisables, en
mémorisant les différents points atteints de l'espace admissible.
Les équations de mouvement du robot de type voiture sont décrites
par :
v
á(t) = á(0) + t. tg?
(4.13)
L
L
x t x 0
( ) ( ) ( ( ) ( ))
= + S t S 0
á á
-
tg?
L
y t y 0
( ) ( ) ( ( ) ( ))
= - C t C 0
á á
-
tg?
|
(4.14)
(4.15)
|
|
L est la distance entre le point OP et
l'axe des roues avants, á(0) est l'angle initial de rotation de
la plateforme par rapport à l'horizontale, et á(t) est
l'angle de rotation de la plateforme à l'instant t. Ces
équations nous permettent de définir le point atteint
après un temps t donné, en imposant la vitesse v
et l'angle de braquage des roues avants ?.
La plateforme doit suivre la trajectoire
précédemment planifiée conformément aux
règles régies par les équations (4.13- 4.15).
Après avoir planifié le mouvement de la
plateforme, qui nous a permis de connaître au préalable la
position de la base du bras, grâce au repère de
référence RB0, nous nous devons d'inverser le
modèle géométrique du bras manipulateur pour pouvoir
accéder à la configuration Ang=[qb1 qb2 qb3
qb4]T, qui nous permettra de faire atteindre
l'échantillon désiré C=[Xc
Yc Zc]T à l'organe terminal.
IV.4.2. Inversion du modèle du bras
manipulateur
Les systèmes d'équations exprimant un
caractère non linéaire peuvent être présents dans
divers domaines, Le cas particulier de la géométrie inverse des
bras manipulateurs en fait partie. Le modèle géométrique
direct d'un système articulé est représenté par des
équations, décrites mathématiquement par des relations
trigonométriques ; elles sont fonction des coordonnées
généralisées, et de leurs produits, ces équations
ne peuvent généralement pas être inversées
directement ; ce sont des problèmes qui peuvent s'avérer
difficiles à résoudre[Flü98].
Nous allons présenter dans cette section
différentes méthodes de calcul du modèle
géométrique inverse, et de là, nous choisirons celle que
nous considérerons la plus appropriée à notre
problème.
IV.4.2.1. Méthodes de calcul du modèle
géométrique inverse
Des méthodes d'inversion du modèle
géométrique ont pu être classifiées selon leurs
procédés de calcul. Nous allons présenter dans ce qui suit
chacune d'entre elles en exprimant leurs particularités.
· Méthodes symboliques ou
analytiques
Ce sont des méthodes qui présentent des
résultats sous forme de solutions algébriques. Elles permettent
de mettre en évidence certaines propriétés des robots. Ces
méthodes présentent l'avantage d'être les plus performantes
au niveau des calculs informatiques, puisqu'elles donnent des solutions
algébriques minimales.
Pieper a été l'un des précurseurs dans
le domaine du calcul du modèle géométrique inverse par les
méthodes symboliques, puisqu'il a été l'un des premiers
à proposer des solutions pour certains manipulateurs à 6 axes
ayant des morphologies particulières [Flü98].
Il n'existe pas encore de méthodes analytiques
générales pour la résolution d'équations du
modèle géométrique inverse, ceci étant
l'inconvénient majeur de l'utilisation de ce type de méthodes ;
elles présentent également le désavantage d'être
sensibles au nombre d'inconnus et aux degrés des équations
· Méthodes adaptatives
Ces méthodes de résolution proviennent d'autres
domaines d'applications, et ont été testées sur des
systèmes robotiques, nous citerons entre autres celles basées sur
le raisonnement géométrique, les réseaux de neurone
[Flü98], ou encore les algorithmes génétiques [Lav0 1].
Ces méthodes peuvent s'avérer très
efficaces, car ayant été testées sur certains
problèmes en robotique qui ont été résolus avec
succès, elles se restreignent tout de même à des
problèmes spécifiques seulement.
· Méthodes itératives
Une solution pour remédier aux problèmes de non
linéarité du modèle direct est d'utiliser des
méthodes itératives ; elles présentent une
originalité par rapport aux procédés de calcul
illustrées précédemment, car elles opèrent en usant
des méthodes d'approximations successives pour la minimisation d'une
erreur, qui doit s'en trouver inférieure à un seuil
prédéfini. Certes, auparavant, ces méthodes étaient
lentes à s'exécuter, puisqu'elles s'opéraient en des temps
de calcul importants, mais l'augmentation de la puissance des ordinateurs
autorise actuellement leurs utilisations [Flü98] [Pho04].
Pour le problème que nous avons eu à traiter,
nous avons utilisé l'une de ces méthodes, nous allons nous y
pencher d'avantage en considérant le cas particulier
représenté par le bras manipulateur que nous allons
étudier.
V' Méthode par linéarisation du
modèle
Le traitement d'un problème de non
linéarité pour un système d'équations quelconque,
par la méthode proposée, consiste à suivre deux
étapes :
- rendre le système d'équations
linéaire.
-Calculer une solution approchée par une méthode
de Newton, en sa qualité de procédé accédant
à une convergence quadratique rapide.
La dérivée partielle des équations du
modèle géométrique direct, en fonction de chacune des
coordonnées généralisées du système
articulé représente une linéarisation du modèle,
elle est exprimée de ce fait sous une forme matricielle par la
jacobienne.
La méthode de Newton procède par
incréments de positions ; c'est une méthode qui calcule des
solutions approchées à l'aide de la représentation
linéaire du système d'équations, qui est mise en
évidence par la jacobienne dans l'espace des vitesses, en
considérant des incréments infinitésimaux.
Généralement, les trajectoires imposées
aux systèmes articulés présentent la particularité
d'être composées de points (échantillons) proches les uns
des autres, ceci implique des changements de configurations pas très
importants. L'utilisation des méthodes itératives peut
s'avérer de ce fait intéressante.
Nous avons utilisé cette méthode, en suivant les
étapes présentées au niveau de l'organigramme
exposé en Fig.IV.14.
Cette méthode nécessite une initialisation de
paramètres tels que ; une estimation des coordonnées
généralisées Ang0
=[qb10 qb2 0qb30
qb40]T , le vecteur å
représentant les erreurs admises par rapport à chaque
coordonnée généralisée, ainsi que le nombre
d'itérations kmax. OT0 est calculé
grâce au modèle géométrique direct [Khl99] du bras
manipulateur. J-1 représente la matrice jacobienne inverse du
système, qui est calculée à partir de la jacobienne
directe pour la configuration donnée Angk-1=
[qb1k-1 qb2k-1 qb3k-1
qb4k-1]T[Flü98] [Dao94].
J-1 a été inversée grâce
à la pseudo inverse de Moore-Ponrose [Pho04], compte tenue du fait que
c'est une matrice qui n'est pas carrée (étant une
conséquence de la redondance du bras manipulateur).
Les coordonnées opérationnelles de
l'échantillon imposé C=[Xc Yc
Zc]T sont exprimées dans le repère
absolu RA ; le modèle inverse s'effectuera pour sa part dans le
repère RB0, ce qui nous incitera à utiliser
B=[Xcb Ycb Zcb]T vecteur des
coordonnées opérationnelles imposées, exprimées
dans le repère RB0, en nous aidant des expressions
du modèle géométrique direct du manipulateur
mobile(4.4-4.6) tel que :
Xcb=-a
'+(Yc-YP)Sá+(Xc-XP)Cá
(4.16)
(-( c - ) + ( + )C ) (4.17)
X X a' X cb á
P
Ycb=-b '+
S á
Zcb=Zc-ZP (4.18)
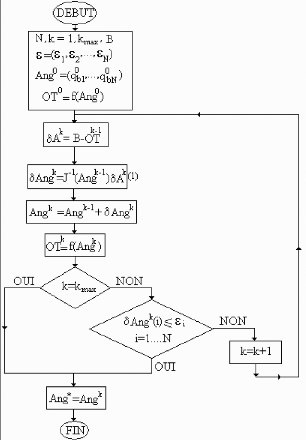
Fig.IV.14. : Organigramme de la méthode
d'inversion du modèle géométrique du bras
Nous avons pu rencontrer deux méthodes de
résolution du modèle géométrique inverse par
linéarisation du modèle : celle proposée par B.Gorla et
M.Renault [Gor84] recorrige le décalage par rapport à l'erreur
å dans l'espace généralisé, alors que
C.Pholsiri [Pho04] recalcule le modèle par rapport à l'erreur
dans l'espace opérationnel. La méthode qui minimise l'erreur dans
l'espace généralisé peut prendre en considération
la résolution minimale du bras manipulateur (le plus petit angle que
peut faire l'articulation), comme cela fut adopté dans notre cas, alors
que la prise en compte de l'erreur dans l'espace opérationnel peut
présenter l'avantage d'atteindre les échantillons
désirés dans l'espace opérationnel, avec l'admission d'une
certaine erreur.
Nous allons nous consacrer dans ce qui suit à
l'étude cinématique de notre système, en donnant les
formules générales nécessaires à
l'élaboration du modèle direct ; le modèle inverse pour sa
part sera traité relativement au système étudié.
IV.5. Modèle cinématique direct
IV.5.1. Représentation générale du
modèle cinématique direct
Le modèle cinématique direct d'un manipulateur
mobile comportant un seul bras manipulateur, pouvant évoluer dans un
espace opérationnel à trois dimensions expose les expressions des
vitesses opérationnelles [ ]T
A & 1 A & 2 A & 3 A
& 4 A & 5 A & 6 en fonction des
vitesses
généralisées
[q&b1...q & bn X &
P Y&P á & ]T ,
comme cela est illustré en Fig IV. 15.
J(qb1,...,qbn,XP,
YP,á)
FigIV.15. Présentation du Modèle
Cinématique
Le calcul du modèle cinématique du
système de manipulation mobile nécessite la dérivation par
rapport au temps, des expressions précédemment formées en
équations (4.4- 4.6) relativement aux vitesses linéaires[ ]T
A & 1 A & 2 A & 3
, pour ce qui est des vitesses angulaires, il suffit de calculer les
vitesses angulaires du bras manipulateurØ& ,
È& et Ö& comme cela
est présenté en équation (4.19) [Fou98].
1 ? ? ? ? ? ? ? ??
(4.19)
{ }
( ' ) ( ' )
a X S b Y C
+ + +
á á á &
E E
} á &
&
Z E
&
&
Ø
+á
&
È
&
Ö
+ + - +
{ ( ' ) ( ' )
a X C b Y S
E E
á á
1 ? ? ? ? ? ? ? ??
&
X S YEC YP
á á
+ +
E
X C Y S XP
E E
á á
- +
& & &
& & &
A6
&
A1
&
A2
&
A3
&
A4
&
A5
Pour modéliser un système de manipulation
mobile, le calcul de la matrice jacobienne du système articulé
Jm est une étape que nous nous devons d'accomplir au
préalable ; nous avons présenté en Annexe B une
méthode [Dao94][Flü98] pour la construire, en nous basant sur les
matrices de transformations d'espaces.
Les vitesses opérationnelles linéaires
X&E,
Y&E et Z& E
ainsi que les vitesses angulaires Ø & ,È
& etÖ&
liées au repère bras RB0 sont
accordées avec les vitesses généralisées du
système articulé &Ang = q &
b 1 . .. q & bn , grâce à la
matrice jacobienne Jm, elle est fonction de la
configuration
[ ]T
Ang=[qb1...qbn]T du bras
manipulateur.
Dans le cadre de notre étude, nous avons
présenté en Annexe B les expressions analytiques des vitesses
linéaires opérationnelles X&
E, Y&E et
Z& E en fonction des coordonnées
généralisées Ang=[qb1 qb2 qb3
qb4]T du porteur du bras Mitsubishi PA10 7CE.
Nous tenons à signaler relativement à
l'équation (4.19) que l'influence des vitesses de la plateforme mobile
n'apparaît que dans la représentation liée à A
& 1, A & 2 et A
& 4, par contre, ces vitesses ne
représentent aucune importance pour les paramètres
A&3, A & 5 et
A & 6. De ce fait, nous pouvons subdiviser le
modèle cinématique en deux parties distinctes [Bay01],
représentant respectivement l'influence des vitesses relatives au
système articulé, exprimées dans le vecteur [ ]T
& Ang = q & b 1 ... q
& bn , et celle des vitesses de la plateforme mobile,
illustrées dans
[ ]
le vecteur T
A & p = X & P Y
& P á& .
Le modèle cinématique en situation du
système de manipulation mobile sera donc exprimé dans
l'équation (4.20)
&
|
& &
|
A=J b Ang+J p A
p
|
(4.20)
|
|
La variables Jp et Jb sont des
matrices telles que :
J 31
...
J 41
...
J 51
...
J 61
...
J3n
J4n
J5n
J 6n
01
{ }
( ' ) ( ' )
a X S b Y C
+ - +
E E
á á
0
0
0
0
0 0
0 1
0 0
0 0
0 ( ' ) ( ' )
- + + +
{ }
a X S b Y C 1
E E
á á
?? ?
1
et Jp=
- -
J S ... J C
á á
+ +
J C ... J S
21 1n
á á
Jb=
21 1 n
Cá
J11
Sá
J11
1 ? ? ? ? ? ?
?? ?
S á
Cá
J2n
J2n
En utilisant les notions précédentes, et en
détaillant les expressions de (4.19) on aura :
&
A1
&
A2
&
A3
&
A4
&
A5
&
A6
1 r J C J S J C J S a X S b Y C
11 21 1n 2n E E
- - - + + +
&
q b1
:
&
qbn
&
XP
&
YP
&
á
|
1
?
?
?
?
?
?
?? ?
|
(4.21)
|
|
{ }
á á á á á
á
... 1 0 ( ' ) ( ' ) 1
? ?
1n 2n 1n 2n E E
+ + + - +
{ } ?
J S J C J S J C a X C b Y S
á á á á á
á
... 0 1 ( ' ) ( ' )
? ? ?
? ? J J Ò
31 3 n
... 00 0
? = ? ?
J J
41 4 n
... 00 1
? ? ?
? ? J J
... 0 0 0 Ò
51 5 n
? ?? ??
? J J
? ? 44444444444444 3
44444444444444 ÿ
1 2
61 6n
... 0 0 0
J
L'équation (4.2 1) nous permet de connaître
l'expression générale de la matrice jacobienne, sans nous soucier
du type de plateforme à considérer.
Les contraintes non holonomes induisent une dépendance
entre les paramètres liés à la plateforme. Cette
corrélation nous permet de réduire la matrice jacobienne pour
former le
[ ] ?
r A ng
&
J b J p Tr &
.
1 42 43 ? ?p ÿ
&
A=
J
(4.23)
modèle cinématique réduit ; le modèle
cinématique d'un manipulateur mobile est donc lié au type de
plateforme portant le bras manipulateur.
IV.5.2. Présentation du modèle
cinématique réduit
Pour une plateforme mobile non holonome quelconque, le vecteur
p& représentera le vecteur de commande, il est lié
au vecteur A& p tel que
A&p = Tr.p & .
L'équation générale représentant la
cinématique du système deviendra donc :
A& = J b
&Ang + Jp .Tr.p & (4.22)
Le tableau Tab.IV. 1 illustre les expressions de Tr.p
& selon le type de plateforme considérée.
Le degré de mobilité se déduit du nombre de
paramètres que comporte la variable p& . En
analysant Tab.IV. 1, nous pouvons remarquer que la plateforme
de type voiture est celle ayant le degré de mobilité le moins
important, le nombre de paramètres régissant son mouvement se
trouve réduit à 1, contrairement à la plateforme
omnidirectionnelle, qui est la plus agile puisqu'elle est apte à se
mouvoir instantanément dans toute les directions ; la commande
pourra se faire sur les trois paramètres [ ]T
X & P Y & P á& en
même temps.
Plateforme
Paramètres
|
Voiture
|
Différentielle
|
Omnidirectionnelle
|
rX&1
P
? & Ò
Y
? P Ò
? á& Ò
? ?
|
r - LC S l
á â 3
?
- LS S [ ]
á â 3 ç
? { p
? C Ò p &
? 3
â ?
1 42 443
TrTr
|
r C 0 1
á v
? ? r ?
S 0
á ? á &
1? ?
? 0 1 Ò {
? 1 42 43 ÿ p &
|
X &
r 1 0 0 i r P i
? ? ?
0 1 0 Ò Y &
? ? P Ò
? á &
? 0 0 1 Ò Ò
1 42 43 ÿ ? ? 123 ÿ
Tr p &
|
Degré de
mobilité Ddm
|
1
|
2
|
3
|
|
Tab.IV.1. modèle cinématique de
différents types de robots mobiles
L'intrusion des contraintes non holonomes dans l'équation
(4.2 1) induit à un changement dans les variables [ ]T
X & P Y & P á&
liées au système mobile, ce qui modifiera la matrice jacobienne
J du manipulateur mobile en la réduisant.
L'expression de la matrice jacobienne réduite pour une
plateforme mobile quelconque, portant un bras manipulateur ayant n
articulations est [Bay01] :
Le modèle cinématique réduit pour un
manipulateur mobile dépend du type de la plateforme portant le
système articulé.
IV.5.2.1. Plateforme différentielle
En utilisant l'expression de (4.23), nous pouvons déduire
directement le modèle cinématique en situation du manipulateur
mobile comportant une plateforme différentielle [Bay0 1] [Fou98]
(équation (4.24))
la composition du vecteur des vitesses
généralisées qui était représentée
comme [q & b1 ... q & bn X&
P Y & P á & ]T ayant comme dimension
n+3, s'avère être devenu [q & b1
... q & bn v á& ]T en incluant les
contraintes non holonomes, sa dimension est n+2.
&
A1
&
A2
&
A3
&
A4
&
A5
&
1
?
?
?
?
?
?
?
??
A6
r J C J S J C J S C a X S b Y C
11 21 1n 2n E E
- - - + + +
á á á á á á
á
1
1 Ò
??
&
qb
:
&
qbn

&
á
... ( ' ) ( ' )
{ } 1
?
11 21 1n 21 E E
á á á á á á
á
+ + + - +
... ( ' )C ( ' )S
{ } ?
J S J C J S J C S a X b Y
? ?
? J J
(4.24)
31 3n
... 0 0 Ò
= ? ?
J J
? 41 4 n
... 0 1 Ò
? J J
... 0 0 Ò
51 5n
? ?
? ? J J ÿ Ò
1 2
44444444444444 3
61 6 n
... 0 0
44444444444444
J
Pour être parvenu à utiliser la variable t,, il y a
eu usage de certaines manoeuvres car la
contrainte de non holonomie impose une contrainte dans
RA telle que [Fou98]:
Sá . X& P -Cá .
Y&P=0
Cette contrainte implique le changement de variables suivant:
1 r C S 1 r &
=
?? 0 Òÿ ?? - S C
á á ?? ? &
[ Y P j
(4.2 5)
IV.5.2.2. Plateforme de type voiture
Comme nous l'avons spécifié dans un exemple
précédemment cité dans le paragraphe III.9.2.
(équations (3.23) et (3.24)), en considérant les contraintes non
holonomes, les vitesses linéaires X & P et Y
& P ainsi que le vitesse angulaire á&
sont liée par une entité qui est la commande
de mobilité çp de la
plateforme, alors le modèle cinématique du système complet
se présentera au niveau de l'équation (4.26).
&
qb
:
&
(4.26)
1 ? ? ? ? ? ? ? ? ? ? ? J
qbn
1
1 Ò
ç
p
&
A1
&
A2
&
A3
&
A4
&
A5
&
A6
|
|
?
1 J C J S J C J S LC S a X S b Y C C
11 21 1n 2n 3 E E 3
á á á á á â
á á â
- - - - + + +
... ( ' ) ( ' )
{ }
?
? ? J S J C J S J C LS S a X b Y C
11 21 1n 21 3 E E 3
+ + - + + - +
... ( ' )C ( ' )S
{ }
? á á á á á â
á á â
?
? J J 0
= ? 31 3n
...
? ?
? J J C
41 4n 3
... â
?
? ? J J 0
51 5n
...
? ?
? J J 0
J 61 6n
...
? 1 2
4444444444444444 3
4444444444444444
J
Nous avons présenté dans cette partie le
modèle cinématique direct d'un manipulateur mobile
évoluant dans un espace opérationnel tridimensionnel en incluant
les vitesses linéaires ainsi que les vitesses angulaires dans le
repère RA, le système présenté comporte un
bras manipulateur ayant comme configuration
Ang=[qb1...qbn]T et comme vecteur
des vitesses
= q & b 1 ... q & bn
.
[ ]T
généralisées
&Ang
Nous allons présenter dans ce qui suit le modèle
cinématique direct pour le manipulateur mobile que nous devons
étudier.
IV.5.3. Modèle cinématique direct
réduit du système à étudier
Le modèle cinématique direct pour le
système à étudier représente la relation entre les
vitesses opérationnelles[ ]T
A & 1 A & 2 A & 3
et les vitesses généralisées[ ]T
q & b 1 q & b 2 q & b
3 q & b4 ç p .
La matrice suivante représente la relation
linéaire qui subsiste entre ces deux vecteurs :
&
q b1
1 ? ?
? ?
?
?
?
|
&
A1
&
A2
&
A3
|
1 ?
?
?J
|
|
r J C J S J C J S J C J S J C J S LC S a XE S b YE C
C
11 21 12 22 13 23 14 24 3 3
{ }
( ' ) ( ' ) 1 &
á á á á á á
á á á â á á â
- - - - - - + + + q
b2 Ò (4.27)
çp
? ? ?
?
?
?
J
Nous pouvons remarquer que cette matrice n'est pas
carrée compte tenu du fait de la redondance du bras manipulateur qui
comporte quatre vitesses généralisées alors que les
vitesses opérationnelles sont au nombre de trois. L'indice de
mobilité çp contribue à
accroître le degré de redondance du manipulateur mobile qui sera
égal à deux.
Nous allons dans ce qui suit présenter l'inversion du
modèle cinématique pour notre système de manipulation
mobile, en tentant de remédier au problème de redondance qu'il
présente, car nous allons utiliser une méthode se concordant avec
la problématique que nous nous sommes posé.
IV.6. Modèle cinématique inverse
Le modèle cinématique inverse consiste à
trouver un mouvement généralisé pour une Tâche
à Mouvement Opérationnel Imposé. Pour un manipulateur
mobile évoluant dans un espace tridimensionnel, le modèle
cinématique inverse consiste à imposer les vitesses dans
l'espace Opérationnel [ ]T
A & = A & 1 A & 2 A
& 3 A & 4 A & 5 A & 6
dans le but d'aboutir à des vitesses
généralisées [ ]T
q & cfg = q & b1 . . . q
& bn X & P Y & P á &
comme cela est présenté en Fig.IV.1 6.
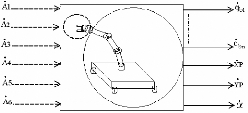
FigIV.16. Modèle cinématique
inverse
Pour le système que nous allons étudier, il
comporte une particularité, puisque la taille du vecteur des vitesses
opérationnelles [ ]T
A & = A & 1 A &
2 & A 3 qui sont en entrée est
inférieure à la taille du vecteur des vitesses
généralisées q& cgf = [ q
& b1 q & b2 q & b3 q & b4
ç p ] qui sont en sortie.
La figure suivante schématise le modèle
cinématique inverse du bras manipulateur Mitsubishi PA10 7CE,
embarqué sur une plateforme mobile non holonome de type voiture.
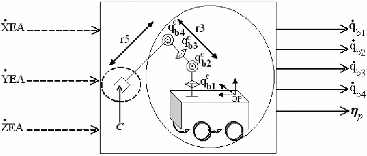
Fig.IV.17.Modèle cinématique du
système à étudier
Dans le cadre de notre étude, le modèle
cinématique inverse va être calculé relativement au
modèle géométrique inverse. Un échantillon
C quelconque va être considéré relativement
à ses coordonnées en position [Xc Yc
Zc]T, ainsi que ses vitesses opérationnelles
[X& c Y& c Z & c ]T
selon les direction des trois axes xrA,
yrA et zrA. C va être
représenté par le vecteur [Xc Yc
Z
c X & c Y & c Z & c ]T .
Pour pouvoir calculer le modèle cinématique inverse du
système considéré, il
nous faut inverser le
modèle géométrique, de sorte à atteindre les
coordonnées opérationnelles
c c
[Xc Yc
Zc]T, pour accéder à la configuration
c c
qcgf =[ q b1 q q q X Y á
]T . Grâce à
c c c c
b2 b 3 b 4 P P
cette configuration, nous calculerons la matrice jacobienne
réduite c
J illustrée en équation
(4.27).
Finalement, pour atteindre les vitesses
généralisées c
q& cgf =[c
q & b1 q & q & q
& ç ]T en imposant c c c c
b 2 b 3 b 4 p
les vitesses opérationnelles [X& c
Y& c Z & c ]T de l'échantillon C,
il nous faut inverser la matrice jacobienne c
J propre à c
qcgf
· Problématique
La matrice jacobienne réduite résultante
exprimée en équation (4.27) comporte un nombre de lignes
égal à 3 et un nombre de colonnes égal à 5.
Dans un cadre général, pour une configuration
régulière, un système redondant cinématiquement
comporte une matrice jacobienne J ayant (u lignes x
í colonnes), avec u inférieure à
í (u <í).
Le système est présenté symboliquement par
:
?
?
?
??
A 1
& 1 11 1
1 J J
... í 1 q &
? ? ? ?
: = : ... : :
? ? ? ?
A & u q
? ? ? ?
]u uí í
? J J &
1 ... ]
1 44 2 44 3
J
Et son modèle inverse sera donc :
?
?
?
??
1
?
?
?
]
q 1
? ... ? &
1 1 ? A
1
? ? ? ?
(4.29)
: = : . . . : :
? ? ? ?
q í A u
? ? ? ] ? &
] 1 42 43
? ? ... ? ?
- 1
J
Nous pourrons remarquer que pour le cas de figure
présenté dans cette partie, la matrice jacobienne réduite
J n'est pas carrée, ce qui rend délicat son
procédé d'inversion.
· Solution
Une méthode d'inversion du modèle
cinématique consiste à imposer des contraintes en vitesses au
système, pour que ça devienne un système de Cramer [Fou98]
avec une jacobienne réduite carrée apte à être
inversée.
La méthode en question est appelée «
méthode des tâches additionnelles » ; nous allons
dans ce qui suit expliciter le principe de ce procédé, en nous
ramenant au cas particulier de notre système.
IV.6.1. Méthode des Tâches additionnelles
Dans le cadre de notre étude, le système
considéré est redondant cinématiquement, puisqu'il existe
une infinité de solutions au problème d'inversion du
modèle cinématique. Nous allons donc formuler nos données
relativement à ce cas de figure.
Pour un manipulateur mobile quelconque, comportant un bras
manipulateur redondant vis à vis de la tâche de manipulation, et
une plateforme mobile non holonome, la matrice jacobienne réduite
résultante J de dimension u xí n'est
pas carrée ; pour y parvenir, la méthode des tâches
additionnelles admet l'intrusion de (í-u ) lignes
supplémentaires, de sorte à générer une matrice
carrée apte à être inversée directement, et donnant
un résultat unique dans l'espace des configurations .
Pour un manipulateur mobile quelconque, nous avons :
&
{ { 123
A = J q (4.30)
[ ][ cfg ]
&
ux
í
u
í
La méthode des tâches additionnelles nous permet
d'avoir le système d'équations suivant :
&

]
Wa J a q
= [ ] [ &
í
x
í x 1
{ { 123 cfg
íu í u
- ( - )
(4.31)
Que nous ajouterons à l'équation (4.30) pour avoir
[Bay01]:
?
???
&
? ?
A J
J a
1
??
123
í { Jt
=
?? ??
&
Wa
? {
[ ]
(4.3 2)
q & { cfg
í
í í
x
Les lignes injectées représentent des contraintes
par rapport au mouvement, car nous allons imposer des vitesses.
o Modèle cinématique inverse du
manipulateur mobile à étudier
Le manipulateur mobile comportant le porteur du bras
Mitsubishi PA10 7CE embarqué sur une plateforme mobile de type voiture,
est considéré comme redondant cinématiquement, puisque la
dimension í du vecteur des vitesses
généralisées c
q& cgf =[c
q & b1 q & q & q
& ç ]T (égale
c c c c
b2 b 3 b 4 p
à 5), est supérieure à la dimension
u du vecteur des vitesses
opérationnelles [ ]T
A & = A&1 A& 2
& A 3 (égale à 3).
Le nombre de tâches additionnelles pour que la matrice
devienne carrée, et donc inversible,
est í-u =5-3=2.
· Première tâche
additionnelle
Le choix de la première tâche additionnelle
s'impose directement, elle est déduite du modèle
géométrique inverse, car, lors de cette phase, nous avons
imposé les vitessesX& P,
Y&P et á&. Ces variables
sont liées par un vecteur à la mobilité
çp qui est choisie comme étant la
première tâche additionnelle, la représentation de la
cinématique du système est donc la suivante :
79
0
0 0
0 1
1 ?
?
?
?
?
?
J
&
}Câ
3
}Câ
3
Câ
3
&
qb
1
&
qb2
&
qb
3
1 ? ? ? ? ? ? J
&
& &
XE,YE
ou Z&E relativement au
repère RB0, la cinématique du système
sera la suivante :
Chapitre IV Modélisation
Cette tâche ne représente pas vraiment une
contrainte puisqu'elle est considérée faisant partie de la
stratégie de planification de trajectoire. Si ce n'était pas le
cas, un choix étant effectué dans ce sens aurait pu être
défaillant, car le mouvement de la plateforme aurait certes
été complètement maîtrisé, mais le mouvement
imposé à l'organe terminal ne l'aurait pas été
forcement [Fou98].
· Deuxième tâche
additionnelle
Le choix de cette tâche est moins immédiat, car
lors de la phase de planification de trajectoire, nous n'avions pas
imposé d'autres vitesses hormis celle de la plateforme, donc nous allons
dans ce qui suit présenter trois choix pour cette seconde tâche
additionnelle.
· Premier choix
Puisque le porteur du bras comporte quatre coordonnées
généralisées Ang =[qb1 qb2 qb3
qb4]T pouvant être contrôlées en vitesse,
alors A&ng =[ q & b1 q
& b2 q & b3 q & b4 ]T ; ce vecteur
peut influer
sur quatre paramètres qui sont
[A&1 A & 2 A
& 3 A & 4 ] T . Les trois premiers
paramètres sont imposés
par la tâche à mouvement
opérationnel imposé, mais
A&4 ne l'est pas, même si le
bras
manipulateur est effectivement apte à
générer une vitesse dans ce sens. Alors, nous pourrons
considérer ce paramètre comme étant un premier choix:
C J S J C J S J C J S J C J S LC
á á á á á á
á á
- - - -
21 12 22 13 23 14 24
J S J C J S J C J S J C J S J C LS S
11 21 12 22 13 23 14 24
á á á á á á
á á á â
+ + + + -
J J
33 34
J J
43 44
· Deuxième choix
Le deuxième choix peut se faire dans le sens d'imposer une
des vitesses opérationnelles
J11
Cá
J C J S J
11 21 12
á á
-
&
qb1
&
qb2
&
qb
3
1 ?
?
?
?
?
?
J
&
0
0 0
}Câ
3
0
J34
0 1
- -
J S J C J S J C
22 13 23 14
á á á
J J J
31 3233
- + + +
{ ( ' ) ( ' )
a XE S b YE C
3 á á
S a XE b YE C
â á á â
3 3
+ + - +
{ }
( ' )C ( ' )S
- -
J S LC S
24 á á â
J S J C J S J C J S J C J S J C LS
11 21 12 22 13 23 14 24
á á á á á á
á á á
+ + + + -
&
A1
&
=
A2
&
1 ?
?
?
?
?
? J
A3
çp
1 ?
?
?
?
J
qb4
ç p
&
A1
&
A2
&
A3
A4
çp
= ? J J
31 32
?
J J
41 42
- + + +
{ ( ' ) ( ' )
a XE S b YE C
3 á á
Sâ
+ + - +
{ ( ' )C ( ' )S
a XE b YE
3 á á
0
1 ?
?
?
?
?
?J
qb4
ç p
1 ?
?
?
?
?
?
J
&
} C â
3
1 ?
?
?
?
?
?
J
&
0
0 0
0 1
C J S J C J S J C J S J C J S LC S
á á á á á á
á á â
- - - -
21 12 22 13 23 14 24
J S J C J S J C J S J C J S J C LS S
11 21 12 22 13 23 14 24
á á á á á á
á á á â
+ + + + -
J11
= ? J J
31 32
?
J J
11 12
J J
33 34
J J
13 14
XE
çp
A2
A3
A1
&
&
&
- + + +
{ ( ' ) ( ' )
a XE S b YE C
3 á á
+ + - +
{ ( ' )C ( ' )S
a XE b YE
3 á á
0
0
} C â
1 ? ? ? ? ? ?J
&
q b1
2
3
&
qb3
qb4
ç p
&
qb
1 ?
?
?
?
?
J?
?
?
?
&
qb1
&
q b2
&
qb 3
Dans cette équation , nous avons imposé
X&E, le même procédé sera
adopté en imposant les vitesses opérationnelles
Y&E ouZ&E,
sauf que le vecteur [J11 J12 J13 J14 0] sera remplacé
respectivement par [J21 J22 J23 J24 0] ou [J31 J32 J33 J34
0].
· Troisième choix
Un troisième choix de tâche peut se faire dans le
sens d'imposer une des quatre vitesses généralisées
A& ng = [q&b1 q &
b2 q & b3 q & b4 ]T, ce qui
donnera le système d'équations suivant (en
imposant q& b1):
&
A1
&
A2
&
A3
1 ?
?
?
?
?
?
J
J11
- + + +
{ ( ' ) ( ' )
a XE S b YE C
3 á á
C J S J C J S J C J S J C J S LC S
á á á á á á
á á â
- - - -
21 12 22 13 23 14 24
J S J C J S J C J S J C J S J C LS S
11 21 12 22 13 23 14 24
|
= ? J J
31 32
?
|
J J
33 34
|
á á á á á á
á á á â
+ + + + -
}Câ 3
}Câ 3
+ + - +
{ ( ' )C ( ' )S
a XE b YE
3 á á
0
&
q b1
çp
& Ò
?
J
qb4
çp
1 0 0 0 0
0 0 0 0 1
Si le choix se portait sur une autre vitesse
généralisée, il ne suffit qu'à changer la
quatrième ligne de la jacobienne réduite selon le choix de la
vitesse généralisée à imposer.
IV.7. Conclusion
Nous avons présenté dans ce chapitre le
modèle géométrique direct d'un manipulateur mobile
quelconque comprenant un système articulé à n
liaisons porté sur un véhicule mobile pouvant se mouvoir dans le
plan (OA, x r A , y r A) ; nous avons utilisé
deux méthodes. Ce modèle
est utilisé dans le cadre de l'application d'une
tâche généralisée point à point (TGPP).
Nous avons également présenté le
modèle géométrique inverse d'un système comportant
un bras manipulateur redondant, comptant quatre coordonnées
généralisées, et une plateforme de type voiture. Nous
avons proposé une solution aidant à la planification de
trajectoire de ce type de système, dans le cadre d'une application d'une
tâche à trajectoire opérationnelle imposée (TTOI),
où nous avons pu proposer une stratégie qui repose sur un
découplage partiel du manipulateur mobile, en planifiant la trajectoire
de la plateforme, afin qu'elle puisse être suivie relativement
fidèlement, dans les limites des possibilités admises par les
contraintes non holonomes. Le chemin suivi par le système mobile permet
au système articulé à son tour d'être
configuré, pour pouvoir atteindre les différents
échantillons représentant la trajectoire
opérationnelle.
Nous nous sommes consacré par la suite à
l'étude de la cinématique, puisque nous avons eu à
décrire la méthodologie de construction d'une matrice jacobienne
réduite, pour un manipulateur mobile comportant un bras manipulateur
ayant n coordonnées généralisées, et un
système mobile non holonome. Nous avons ensuite appliqué cette
étude théorique à notre manipulateur mobile.
Nous avons constaté lors de la mise en oeuvre de la
matrice jacobienne de notre système qu'il
s `est avéré
être redondant cinématiquement (de degrés 2). Lorsque nous
nous sommes
consacré à la mise en oeuvre du modèle
cinématique inverse, il nous a fallu inverser la matrice
jacobienne réduite, mais puisque le système
d'équations ne formait pas un système de Cramer, alors nous avons
adopté la méthode des tâches additionnelles, qui consiste
à ajouter des lignes supplémentaires en guise de contraintes,
pour pouvoir rendre la jacobienne réduite inversible, surtout que cette
méthode s'accorde conjointement avec la planification de trajectoire que
nous avons proposé .
Nous avons pu remarquer tout au long de ce chapitre que la
mise en oeuvre des modèles directs représentait des lois
génériques, alors que les modèles inverses ont
été construits selon la composition du système
articulé mobile. Nous avons aussi déduit que le modèle
cinématique en situation est fonction du type de la plateforme à
étudier, alors que le modèle géométrique direct
s'avère universel et n'est lié qu'à la disposition des
différents repères de référence. Cela est dû
aux contraintes non holonomes, qui ne transparaissent qu'en considérant
l'aspect vitesse.
Toutes ces méthodes ont été
présentées pour pouvoir être testées dans le
chapitre suivant par des simulations, où nous nous consacrerons
principalement à l'étude des modèles inverses en les
validant grâce aux modèles directs.
Chapitre V
Simulations et Résultats
V.1. Introduction
Nous avons tout au long de ce mémoire
présenté les différentes notions relatives aux
manipulateurs mobiles; notre intérêt s'est porté sur
l'élaboration d'une stratégie de planification de trajectoire et
de mouvement pour un manipulateur mobile.
Toute la théorie présentée
préalablement sera appliquée dans ce chapitre sous forme de
résultats de simulations.
Nous allons dans ce qui suit décrire l'environnement de
programmation dans lequel nous avons effectué nos simulations.
V. 2. Implémentations
V.2.1 .Environnement de programmation
Nous avons effectué nos simulations en usant du langage
C++, l'environnement de programmation choisi est donc « C++Builder 5
» qui bénéficie à la fois de la puissance, et de la
facilité de développement d'une application Windows, qui devient
de ce fait plus rapide.
· Propriétés et avantages de
C++Builder 5
Cet outil logiciel de la société BORLAND,
basé sur le concept de programmation orientée objet, permet
à un développeur, même non expérimenté, de
créer assez facilement une interface homme/machine d'aspect «
Windows ». Ce sont ses propriétés qui lui présentent
des avantages puisque :
+ C++Builder offre la possibilité d'utiliser toutes les
bibliothèques de Windows installées sur l'ordinateur.
+ Le problème de la mémoire est résolu,
l'utilisateur peut réserver autant d'espace
mémoire qu'il veut (efficacité de C++Builder dans
la gestion de la mémoire).
+ Le Menu, les Boutons (Ok, Annuler,...), les images et
beaucoup d'autres objets sont configurés dans C++Builder d'une
façon standard, et l'utilisateur peut changer leurs
propriétés d'une façon très libre.
Développer une application Windows à l'aide de
C++Builder consiste en effet à :
· Concevoir l'interface utilisateur de manière
particulièrement visuelle et interactive.
· Spécifier de manière tout aussi interactive
les caractéristiques, appelées propriétés, des
divers composants (fenêtres, boutons de commande, zone d'édition,
etc.).
· Spécifier le code (souvent limité à
quelques lignes) à exécuter lorsque l'utilisateur effectue une
action particulière.
Borland apporte donc à travers le C++Builder 5 une grande
puissance de programmation et une convivialité dans la mise en oeuvre
des outils suivants :
· Editeur multifichier et multifenêtre.
· Utilisation de la souris.
· Editeur de programme, compilateur, éditeur de
liens, aide par hypertexte dans un environnement intégré.
· Gestion de projet amélioré.
· Debugger intégré.
V.2.2. Affichage des résultats
Les résultats ainsi que les formes des trajectoires en
trois dimensions ont été présentés dans
l'environnement MATLAB.
V.2.3. Principaux objets utilisés
La représentation des résultats concernant la
planification de trajectoire et de mouvement, dans un espace à deux
dimensions, fut réalisé grâce à l'utilisation d'un
objet de type TImage, dans la palette appelée «Additional»,
où nous avons eu à manipuler des Pixels.
Pour la représentation des trajectoires
opérationnelles dans le plan (OA , x r A , y
r A), il existe deux
instructions propres à C++Builder, qui sont «
rectangle » où deux points de références doivent
être entrés, tels que, celui se trouvant à gauche dans la
partie supérieure, et celui se trouvant à droite dans la partie
inférieure, nous avons également utilisé l'instruction
« ellipse », en mettant en entrée un point de
référence, qui est le centre de l'ellipse, ainsi que la longueur
des petit et grand axes (ou encore la même distance dans le cas d'un
cercle).
Après les précédentes procédures,
nous avons récupéré les coordonnées des pixels
régis par les formes utilisées précédemment,
représentant la trajectoire opérationnelle imposée.
V.3.Validation des modèles inverses
Les modèles inverses sont validés grâce
aux modèles directs, puisque pour la partie de l'étude traitant
de l'aspect géométrique dans laquelle nous avons imposé
une trajectoire opérationnelle, nous avons calculé la trajectoire
généralisée grâce au modèle inverse, ensuite,
nous avons imposé les coordonnées
généralisées qcfg en utilisant le
modèle direct, afin de calculer les coordonnées
opérationnelles AD, comme cela est explicité dans Fig.V.
1 .a. Nous avons considéré que le modèle est valide si
||A-AD|| est inférieure à 1cm, sachant que nous
n'avons considéré que les coordonnées cartésiennes.
Il en est de même pour l'aspect cinématique, puisque nous avons
calculé la jacobienne réduite inverse 1
J - pour calculer les
vitesses généralisées q&
cfg. Ensuite nous avons procédé à la
validation des résultats en
réinsérant les vitesses
généralisées grâce à la matrice jacobienne
directe J selon Fig.V. 1 .b.

(a) (b)
Fig.V.1 : Validation des modèles : (a)
Modèle géométrique, (b) Modèle
cinématique.
V.4.Trajectoires opérationnelles
imposées
Dans le cadre de notre étude, nous avons
considéré trois types de trajectoires opérationnelles
imposées telles que :
V.4.1 .Trajectoire carrée
Cette trajectoire est particulière, puisqu'elle
comporte une évolution sous forme de segments perpendiculaires les uns
pas rapport aux autres ; une plateforme mobile non holonomes ne pourrait pas
suivre ce type de trajectoire si l'on devait la lui imposer directement.
· Caractéristiques
Longueur du grand axe :170 Cm
Longueur du petit axe :170 Cm
Evolution de la hauteur : 1mm/échantillon Nombre
d'échantillons : 675
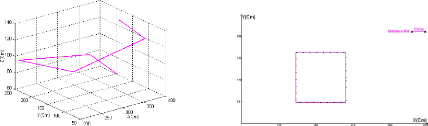
(a) (b)
r r r
Fig.V. 2. Trajectoire carrée (a)
représentation dans le plan ( , z A )
O A , x A , y A , (b)
représentation dans le
plan (OA, x r
A,y r A)
V.4.2.Trajectoire ellipsoïdale
Cette trajectoire est lisse mais elle comporte une
évolution non linéaire, en raison des longueurs des rayons qui
diffèrent. Si l'on imposait un certain angle faisant partie de
l'ellipse, il ne couvrirait pas le même périmètre dans tout
l'espace représentant la forme ellipsoïdale.
· Caractéristiques
Longueur du grand axe : 150 Cm.
Longueur du petit axe : 100 Cm
Evolution de la hauteur :1 mm/échantillon Nombre
d'échantillons : 719
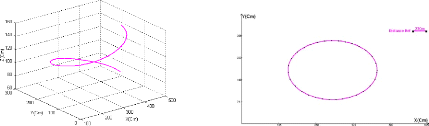
(a) (b)
r r r
Fig.V.3. Trajectoire ellipsoïdale :
représentation dans le plan ( , z A )
O A , x A , Y A ,
représentation dans le
plan (OA, x r
A,Y r A)
V.4.3.Trajectoire Circulaire
Cette trajectoire est lisse et régulière ; si l'on
prenait un angle quelconque faisant partie du cercle, il couvrirait la
même distance appartenant au périmètre du cercle.
· Caractéristiques
Longueur du grand axe :100 Cm.
Longueur du petit axe :100 Cm.
Evolution de la hauteur : 1mm/échantillon Nombre
d'échantillons : 563

(a) (b)
r r r
FigV.4.Trajectoire circulaire : représentation
dans le plan ( , z A )
O A , x A , Y A ,
représentation dans le plan
Remarques
Les caractéristiques du bras manipulateur ainsi que
celles de la plateforme sont présentées en Annexe C.
L'unité de mesure des variables articulaires Ang = [qb1 qb2
qb3 qb4]T, ainsi que celle des paramètres relatifs
à la plateforme, tels que á et ? est le radian;
les vitesses généralisées relatives au bras manipulateur
quand à elles sont considérées en radians/seconde.
V.5.Représentation des Champs
Les champs représentés en Fig.V.5 pour la
trajectoire ellipsoïdale sont relatifs à l'échantillon
n°1, ainsi qu'à l'échantillon numéro 550, par contre,
pour la trajectoire
circulaire, les champs représentés sont
relatifs à l'échantillon n°1, et l'échantillon
numéro 440, la trajectoire carrée quand à elle comprend la
représentation du champs relatif à l'échantillon
numéro 1 ainsi que le numéro 500.
Nous pouvons remarquer que les champs
générés relativement aux deux échantillons
considérés pour chaque trajectoire sont très particuliers,
puisque le rayon du premier échantillon (représenté en
noir) est plus important que celui du second, cela est dû à
l'augmentation de la hauteur, facteur prépondérant dans la
diminution du rayon d'un quelconque champ. Si par contre, les hauteurs des
différents échantillons étaient identiques, alors les
rayons des différents champs Rmax le seraient tout
autant.
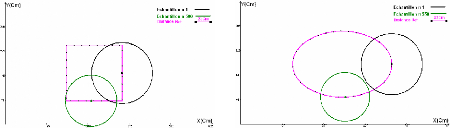
(a) (b)


(c)
Fig.V.5. Représentation des champs
(a) Trajectoire carrée, (b) Trajectoire
Ellipsoïdale, (c) Trajectoire circulaire
Avant d'entamer l'étude de la planification de la
trajectoire, et la génération du
mouvement de la plateforme mobile, une explication concernant
le déplacement du système
de manipulation mobile lors de
l'inversion du modèle géométrique se présente
comme
nécessaire.
V.6. Modèle géométrique inverse
V.6.1. Déplacements du manipulateur mobile
Le système mobile se déplace
simultanément avec l'évolution spatiale des divers
échantillons, c'est à dire que si nous considérons une
configuration de la plateforme [XPi YPi ái]T, et une
configuration du bras manipulateur Angi=[qb1i qb2i qb3i
qb4i]T permettant d'atteindre l'échantillon
numéro i, alors, pour accéder à
l'échantillon numéro i+1, la plateforme est
sollicitée au même titre que le système articulé;
mais quand le bras
manipulateur présente une impossibilité
d'atteinte de l'échantillon courant (car il peut s'en trouver distant),
alors le système mobile est sollicité seul.
L'initialisation de la position de la plateforme [XP
YP]T s'effectue en faisant en sorte d'éloigner le plus
possible la base du bras manipulateur OB0 du premier
échantillon C1, dans les limites du rayon
Rmax du champ engendré par C1. La position
initiale de la plateforme se trouve donc dans le prolongement du premier
segment ô1 (présenté dans Fig.V.6), construit lors
de la phase de planification de trajectoire. Pour ce qui est de l'orientation
á initiale, le robot mobile est dirigé selon
ô1, et l'angle de braquage initial ? est égal
à 0.
L'estimée globale Ang0
=[qb10 qb2
0qb30 qb40]T
représentant un paramètre indispensable utile lors de la phase
d'inversion du modèle géométrique du bras manipulateur,
est fixée au commencement du mouvement de la plateforme mobile, aussi,
chaque coordonnée généralisée du bras manipulateur
pour l'échantillon courant présente une estimée pour le
suivant ; lors du déplacement du système articulé mobile
où l'organe terminal se doit d'atteindre l'échantillon
i, l'estimée est représentée par la configuration
Angi-1 relative à l'échantillon
précèdent i-1, mais, lorsque la plateforme mobile est
sollicitée seule, la configuration du bras manipulateur ne se modifie
pas, jusqu'à ce que le système soit apte à atteindre
l'échantillon désiré. L'arrêt définitif du
mouvement de la plateforme mobile est conditionné par le suivi de la
trajectoire opérationnelle, car si l'organe terminal a pu accéder
à tous les échantillons opérationnels, alors la plateforme
mobile s'arrête. Si par contre le bras manipulateur ne parvient pas
à atteindre un quelconque échantillon, alors la plateforme se
déplace jusqu'à atteindre le bout de la trajectoire
planifiée.
Dans l'approche que nous avons adopté, il existe un
certain nombre de paramètres à injecter, et qui risquent
d'influer sur le développement du système articulé mobile;
nous allons dans la partie suivante modifier ces variables en vérifiant
leurs influences sur le comportement du système de manipulation mobile.
Nous débuterons par l'étude de deux types de planifications mises
en oeuvre ; l'estimée initiale est égale à Ang0
= [0.5 1.5 0 0.14]T (radians), le vecteurs å
contenant les erreurs admises pour chaque articulation est égal à
la résolution minimale des liaisons du bras manipulateur, qui
équivaut à 0.0009 radians.
La stratégie de planification de trajectoire
adoptée nécessite l'initialisation de certains paramètres.
Nous allons dans ce qui suit les modifier et étudier leurs influences
sur l'évolution du comportement du manipulateur mobile à
étudier.
V.6.2. Planification de trajectoire
Nous avons considéré deux types d'approches
pour la planification de la trajectoire du système mobile. Elles
représentent une même base de réflexion, ayant comme
principe de traiter le rayon des champs générés par les
échantillons de référence, mais la différence
réside dans la manière d'appréhender le problème.
La planification appelée « aller » ne traite que du
cas des échantillons en allant du premier vers le dernier, pour le
deuxième type de planification dit « aller-retour »,
nous avons effectué l'opération de planification en allant du
premier échantillon vers le dernier, ensuite nous avons appliqué
l'opération inverse en allant
du dernier échantillon vers le premier, cela nous permet
de faire suivre à la plateforme une trajectoire où la variation
des angles de braquage devraient être moins grandes.
Nous allons dans ce qui suit présenter un exemple de
planification de trajectoire de type « aller »
appliquée aux trois types de trajectoires opérationnelles
imposées, pour donner un aperçu sur la manière
d'appréhender le problème du suivi d'une trajectoire
opérationnelle imposée.
V.6.3. Représentation de la trajectoire et du
mouvement de la plateforme mobile
La planification de mouvement envisagée dans
l'approche que nous avons adopté nécessite l'initialisation de
certains paramètres, tels que la vitesse v imposée
à la plateforme égale à 5cm/s; ces variables gardent la
même valeur tout au long de ce chapitre. Les résultats de cette
planification de mouvement sont présentés en Fig.V.6.
Nous pouvons constater que les trajectoires planifiées
pour les trajectoires opérationnelles
imposées de type
circulaire et ellipsoïdale représentent une projection de la
trajectoire
opérationnelle dans le plan (OA , x r
A , y r A ), avec une évolution relative tout de
même à la
hauteur ; par contre, pour la trajectoire carrée,
composée de quatre lignes perpendiculaires les unes par rapport aux
autres, nous remarquons que lorsque la trajectoire opérationnelle se
présente comme une ligne droite, la trajectoire planifiée la suit
en pente (à cause de la variation de la hauteur). Lorsqu'il y a passage
d'un segment à un autre qui lui est perpendiculaire (appartenant
à la trajectoire carrée), la planification donne un
résultat représentant une trajectoire comportant des segments
successifs ayant des pentes inférieures à 9Ø°,
nommés TL dans (Fig.V.6.a), permettant ainsi à la
plateforme non holonome de tourner progressivement.
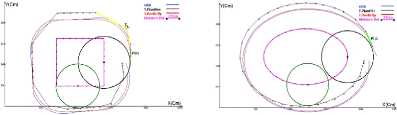
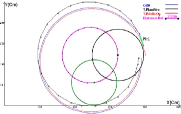
(a) (b)
(c)
Fig.V.6. Planification de mouvement de la
plateforme:
(a) Trajectoire carrée, (b) Trajectoire
Ellipsoïdale, (c) Trajectoire circulaire.
Le mouvement réel de la plateforme (pour les trois
types de trajectoires opérationnelles imposées) épouse la
forme de la trajectoire planifiée, avec plus ou moins de
fidélité, à cause des limites dans les
déplacements, imposées par les contraintes non holonomes.
Nous remarquons qu'il existe tout de même un
décalage entre la trajectoire planifiée imposée et le
mouvement réel de la plateforme. Nous pouvons de prime abord
décréter que la trajectoire opérationnelle imposée
est non atteignable par l'organe terminal car, déjà au
début du mouvement de la plateforme, nous remarquons que le rayon du
champ de l'échantillon numéro 1 est inférieure à la
distance séparant la trajectoire opérationnelle et celle
représentée par la base du bras OB0, et ce
décalage s'en trouve plus apparent pour le deuxième champ
(représenté en vert) où déjà, lors de la
planification de trajectoire, le chemin planifié frôle le champ
concerné, et le décalage s'accentue quand nous avons
considéré le mouvement réel de la plateforme
(OB0 se trouve à l'extérieur du champ, ce qui
empêchera obligatoirement l'organe terminal d'accéder aux
coordonnées opérationnelles imposées). De ce fait, pour
les trajectoires précédemment planifiées, le bras
manipulateur n'est même pas parvenu à atteindre les premiers
échantillons. Nous avons donc trouvé nécessaire de faire
approcher la trajectoire planifiée de la trajectoire
opérationnelle; une solution appropriée consiste à
modifier les rayons des échantillons de référence, car,
puisque la plateforme ne suit pas fidèlement la trajectoire
planifiée et sort quelque peu de son itinéraire, la solution
consiste à diminuer les rayons Rmax pour faire
admettre à la plateforme un certain décalage.
Nous allons dans ce qui suit présenter les deux types
de planifications pour les trois types de trajectoires de
références choisies, tout en diminuant les rayons des champs,
ensuite, nous ferons le choix du planificateur le plus adéquat pour
chaque type de trajectoire, selon des critères particuliers. La
configuration globale Ang0 est initialisée à
[0.5, 1.5, 0, 0. 14]T , nous considérerons aussi la distance
entre échantillons de référence égale à 23
cm. L'erreur admise å est égale à la
résolution minimale des liaisons du bras manipulateur qui est
égale à 0.0009 radians pour chaque articulation. Nous devons
également initialiser le nombre d'itérations kmax qui
est égal à 1000. Dans les parties suivantes, nous signalerons un
quelconque changement survenu sur les valeurs des paramètres
å, Ang0, kmax, ainsi que
Dist.
Remarque
Nous allons évoquer dans les paragraphes suivants le
nombre d'itérations de la plateforme, cela est accompli dans le but
d'éviter d'évoquer les variables temporaires, alors que notre
intérêt s'est porté sur l'évolution spatiale des
échantillons. Une itération de la plateforme correspond à
0.2s dans l'espace temps.
V.6.4. Choix du type de planification de trajectoire de
la plateforme mobile
Nous allons dans ce qui suit diminuer les rayons
Rmax des différents échantillons de
référence en le divisant par un certain quotient appelé
Val, nous allons donc considérer le rayon
Rmax/Val, nous donnerons une valeur à
Val supérieure à 1, et nous tenterons de valider les
deux approches de planifications choisies (« aller » et «
aller-retour »). Nous allons
particulièrement focaliser sur l'influence des deux
types de planifications sur l'évolution de la plateforme, et sur le fait
d'assurer ou non un suivi de la trajectoire opérationnelle
imposée, pour les trois types de trajectoires.
· Trajectoire carrée
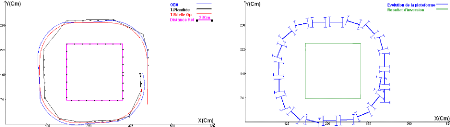
(a) (b)
Fig.V.7. Planification trajectoire en « aller
» de la plateforme mobile (Val=1.26) (a) Mouvement de la
plateforme, (b) Validation du modèle
géométrique
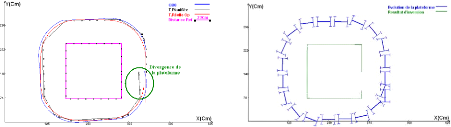
(a) (b)
Fig.V.8. Planification trajectoire en «
aller-retour » de la plateforme mobile avec (Val=1.26)
(a)
Mouvement de la plateforme, (b) Validation du modèle
géométrique
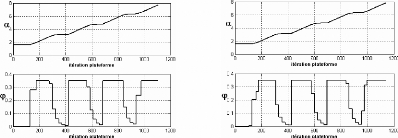
(a) (b)
Fig.V.9. Paramètres propres à la
plateforme
(a) Planification de type aller, (b) Planification de
type aller-retour
La planification en « aller-retour » est apparemment
celle qui permet à la plateforme mobile de suivre la trajectoire
planifiée presque fidèlement, elle n'assure tout de même
pas
forcément le suivi de la trajectoire
opérationnelle imposée, cela est dû au fait que
OB0 s'éloigne de la trajectoire planifiée imposée
au niveau du dernier virage, alors que le planificateur en « aller »
parvient à suivre la consigne jusqu'à pouvoir faire atteindre le
dernier échantillon à l'organe terminal. En planification en
« aller-retour», le système articulé mobile ne parvient
à atteindre tous les échantillons opérationnels que si
Val = 1.4
· Trajectoire Ellipsoïdale
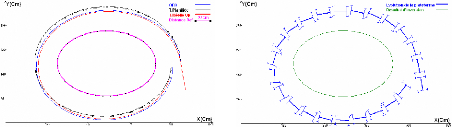
(a) (b)
Fig.V.10. Planification trajectoire en «
aller-retour » de la plateforme mobile (Val=1.24) : (a) Mouvement
de la plateforme, (b) Validation du modèle
géométrique
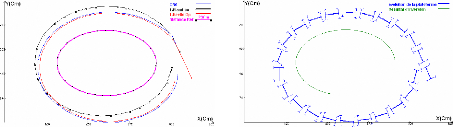
(a) (b)
Fig.V.11. Planification trajectoire en « aller
» de la plateforme mobile (Val=1.24)(a) Mouvement de
la
plateforme, (b) Validation du modèle
géométrique
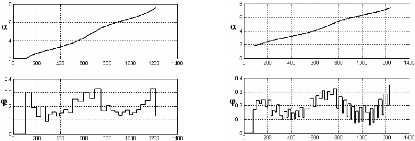
(a) (b)
Fig.V.12. Paramètres propres à la
plateforme
(a) Planification de type aller, (b) Planification de
type aller-retour
La qualité première du planificateur en «
aller-retour » est qu'il soit apte à imposer une variation assez
progressive des angles de braquage, alors que l'évolution de ?
pour le planificateur «aller» présente des variations
plus grandes.
Le paramètre Val doit être égal
à 1.65 en planification « aller » pour pouvoir permettre un
suivi complet de la trajectoire opérationnelle.
· Trajectoire circulaire
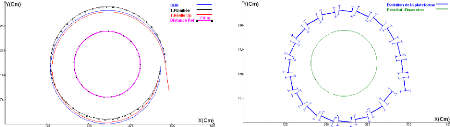
(a) (b)
Fig.V.13. Planification trajectoire en «
aller-retour » de la plateforme mobile (Val=1.24) :
(a)
Mouvement de la plateforme, (b) Validation du modèle
géométrique
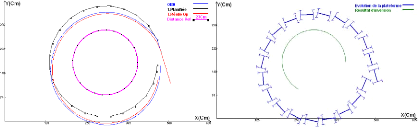
(a) (b)
Fig.V.14. Planification trajectoire en « aller
» de la plateforme mobile (Val=1.24):
(a) Mouvement de la
plateforme, (b) Validation du modèle
géométrique
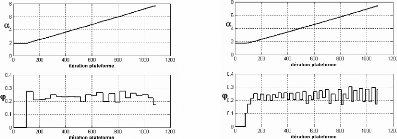
(a) (b)
Fig.V.15. Paramètres propres à la
plateforme : (a) Planification de type Aller, (b) Planification de
type
aller-retour
Pour ce type de trajectoire, la valeur minimale que peut
prendre Val pour pouvoir atteindre tous les échantillons
opérationnels, est égale à 1.46 en planification «
aller ».
Nous pouvons remarquer que l'angle de braquage ?
pour ce type de trajectoire présente énormément de
variations en planification « aller-retour »; les valeurs de
? se situent entre 0.16 et 0.3 radians, alors qu'en planification en
« aller », où hormis la première variation importante
qui est de l'ordre de 0.27 radians, les fluctuations se réduisent par la
suite, et ? se situe entre la valeur 0.19 radians et 0.27 radians.
· Interprétation
Les expériences appliquées aux trois types de
trajectoires montrent que le paramètre á ne varie pas
beaucoup, selon le type de planification ; par contre, l'angle de braquage
? se montre comme fortement sollicité lors de la planification
en « aller-retour ». Cela est dû à la prise en compte
des échantillons de référence en aller et en retour,
où les points Pi (présentés dans le paragraphe
VI.4. 1.3) sont très proches, ce qui entraîne de soudaines
variations au niveau du paramètre ?.
Pour ce qui est de la planification en « aller »,
elle présenterait certainement un inconvénient, car il faut que
la roue soit apte à braquer d'un angle maximal en un certain laps de
temps. Or, comme nous l'avons constaté (surtout pour la trajectoire
carrée), la variation des angles de braquage est importante.
La planification en « aller-retour »
présente par contre un autre inconvénient relativement à
l'énergie consommée, puisque le nombre de variations de l'angle
? est important, alors l'énergie consommée le sera
également.
Nous pouvons remarquer que la planification en «
aller-retour» permet un suivi plus exact du chemin planifié par la
plateforme mobile, pour tous les types de trajectoires opérationnelles
utilisées.
Le fait de pouvoir éloigner la plateforme mobile le
plus possible de la trajectoire opérationnelle imposée (Val
prend la valeur la plus petite possible), tout en permettant à
l'organe terminal d'atteindre les échantillons est un avantage, l'espace
admissible relatif à la plateforme mobile s'en trouve plus vaste, ce qui
permet de re-planifier la trajectoire du système mobile dans le cas de
présence d'obstacles.
En faisant abstraction de l'aspect énergétique
et des vitesses de braquage, et en donnant la priorité au facteur
d'aptitude de l'organe terminal à atteindre les échantillons
opérationnels désirés, nous allons par la suite
considérer une planification en « aller-retour » pour les
trajectoires circulaire et ellipsoïdale, et une planification en «
aller » pour la trajectoire carrée.
Nous allons dans ce qui suit modifier le paramètre
Val en vérifiant son influence sur les variables articulaires,
ainsi que sur les paramètres relatifs à la plateforme mobile.
V.6.5. Modification des paramètres pour la
planification de trajectoire V.6.5.1. Influence de la longueur des rayons des
champs de référence
· Trajectoire carrée
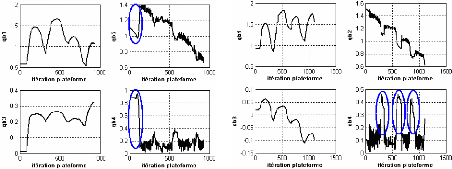
(a) (b)
Fig.V.17. Coordonnées
généralisées du bras manipulateur: (a) Val=2, (b)
Val=1.26
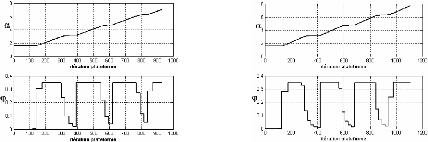
(a) (b)
Fig.V.18. Paramètres propres à la
plateforme : (a) Val=2, (b) Val=1.26
Nous remarquons une fluctuation assez importante au niveau
des angles qb2 et qb4 pour
Val=2 (Fig.V. 1 7.a), ces mêmes coordonnées
généralisées présentent également des
variations importantes (comparées à la valeur moyenne de ces
angles), qui surgissent subitement à certains moments seulement pour
Val=1 .26.
L'orientation de la plateforme ainsi que l'angle de braquage
ne présentent pas de différences perceptibles. Nous avons
constaté que le nombre d'itérations de la plateforme pour
Val=2 est égal à 931, alors que pour Val =
1.26, le nombre d'itérations est égal à 1109.
· Trajectoire ellipsoïdale
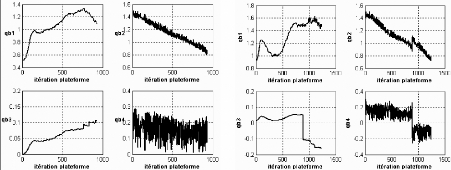
(a) (b)
Fig.V.19. Coordonnées
généralisées du bras manipulateur: (a) Val=2, (b)
Val=1.24.
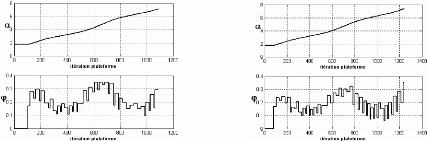
(a) (b)
Fig.V.20. Paramètres propres à la
plateforme : (a) Val=2, (b) Val=1.24
Pour ce type de trajectoire, nous avons constaté que
pour le cas où Val =1.24, les angles qb2,
qb3 et qb4 comportaient un changement
brusque au niveau de l'itération 892, cela représente un
inconvénient surtout que ce phénomène ne se produit pas
lorsque le paramètre Val est égal à 2, où
nous constatons une évolution progressive des variables articulaires
sans changements brusques. Cela risque d'engendrer une perte en énergie
(c'est la fluctuation la plus importante qui se présente au niveau de
l'évolution de ces articulations).
Dans le cas où la valeur du paramètre Val
est égale à 1.24, nous constatons que l'angle de braquage
? exprime un plus grand nombre de variations. Le nombre
d'itérations de la plateforme correspond à 1090 itérations
pour Val=2, alors qu'il est égal à 1246 pour
Val=1 .24.
· Trajectoire circulaire
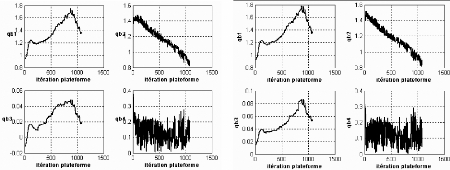
(a) (b)
Fig.V.21. Coordonnées
généralisées du bras manipulateur: (a) Val=2, (b)
Val=1.24
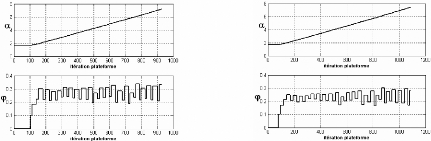
(a) (b)
Fig.V.22. Paramètres propres à la
plateforme : (a) Val=2, (b) Val=1.24
Nous pouvons remarquer qu'il n'existe pas une grande
différence entre l'évolution des résultats pour Val
= 2 et Val =1.24. Lorsque Val=1 .24, l'angle de braquage
maximal se présente comme plus important (Fig.V.21.b). Il est
égal à 0.35 rad pour Val=2 alors, qu'il équivaut
à 0.28 rad pour Val=1 .24. Il y a eu 930 itérations
ayant permis au système articulé mobile d'atteindre tous les
échantillons opérationnels pour Val=2, alors que ce
nombre s'accroît en augmentant la distance pour Val=1.24
puisqu'il devient égal à 1089.
· Interprétation
Les trois trajectoires présentent une diminution dans
les déplacements de la plateforme lorsque Val prend une valeur
importante, ceci s'accorde avec le fait qu'en diminuant les rayons des
différents champs pour les échantillons de
référence, la distance que doit parcourir la plateforme diminue
également.
Nous pouvons remarquer tout de même que les
butées articulaires n'ont pas été atteintes pour les deux
exemples (Val=2 et Val=1 .24), ce qui nous permet de
considérer que l'estimée globale Ang0
constitue un choix intéressant.
Nous constatons pour les trois types de trajectoires que
l'évolution de la hauteur est subie en majorité par l'angle
qb2, car sa valeur diminue au fur et à mesure.
Pour la trajectoire ellipsoïdale, les fluctuations
évoquées précédemment au niveau des angles
qb2, qb3 et qb4 sont survenus
pour l'itération numéro 892 avec Val étant
égal à 1.24, car le bras manipulateur est presque allongé,
la distance qui sépare l'échantillon courant C de
OB0 est quasiment égale à la distance
Rmax (la distance (Rmax
-distance (OB0, Cxy)) est de l'ordre de 0.0001cm). Lors
de l'étude de la trajectoire carrée, nous avons également
rencontré des changements brusques dans l'évolution des angles
qb2 et qb4; nous pouvons
expliquer aussi ce phénomène par rapport à la distance
séparant OB0 de l'échantillon
désiré C. Cela peut être aperçu au niveau
des courbes présentées en Fig.V.24, où nous avons
calculé pour chaque déplacement de la plateforme la
différence « Dif = Rmax -distance
(OB0, Cxy) » , ce paramètre est illustré
dans la figure suivante :
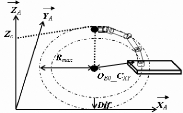
Fig.V.23. représentation de la Distance
Dif
Nous pouvons constater que les fluctuations relatives
à Dif coïncidaient avec les variations des angles
qb2 et qb4, cela permet de
dire que la distance séparant les échantillons, de la base du
bras OB0 est un critère important influençant
fortement l'évolution des variables articulaires.
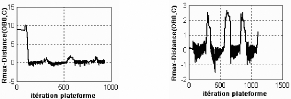
(a) (b)
Fig.V.24. Distance Dif : (a) Val=2 ,
(b) Val=1.26
Une autre variable à initialiser est la distance entre
les échantillons Dist. C'est la raison pour laquelle nous
allons dans ce qui suit modifier cette valeur en l'augmentant, et nous allons
vérifier si ce changement pourrait présenter une influence sur
les résultats obtenus.
V.6.5.2. Influence de la distance entre
échantillons de référence Dist
Dans cette partie, nous allons modifier la distance entre les
échantillons de références Dist, nous allons
considérer Dist=50cm, et Dist=10cm, sachant que
Val est égale à 2.
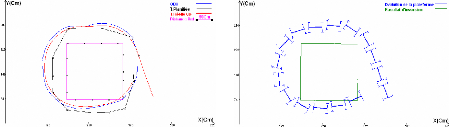
· Trajectoire carrée :
(a) (b)
Fig.V.25. Planification trajectoire de la plateforme
mobile (Dist=50Cm)
(a) Mouvement de la plateforme,
(b) Validation du modèle géométrique
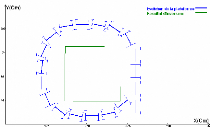
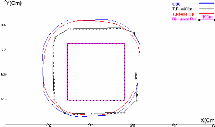
(a) (b)
Fig.V.26. Planification trajectoire de la plateforme
mobile (Dist=10Cm):
(a) Mouvement de la
plateforme, (b) Validation du modèle
géométrique
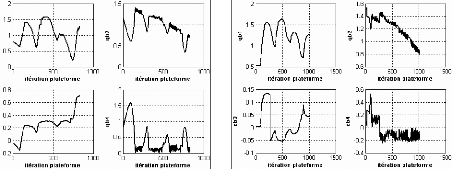
(a) (b)
Fig.V.27. Coordonnées
généralisées du bras manipulateur : (a)
Dist=50Cm, (b) Dist=10Cm
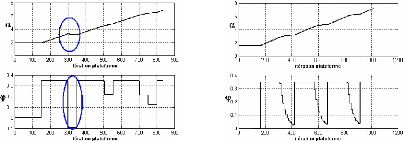
(a) (b)
Fig.V.28. Paramètres propres à la
plateforme : (a) Dist=50Cm, (b) Dist=10Cm
Si le carré représentant la trajectoire
opérationnelle était composée de murs (la plateforme ne
doit pas percuter un des segments), alors nous pouvons juger que l'obstacle est
heurté, car nous remarquons que la plateforme s'approche trop
prés de la trajectoire opérationnelle.
Nous constatons que pour Dist=50cm, l'angle
á présente une évolution presque linéaire.
Il existe une diminution brusque de l'angle ? au niveau de
l'itération numéro 299, sa valeur égale à -0.09,
alors qu'il était égal à 0.35, ce changement dans la
valeur de l'angle de braquage apparaît même au niveau de la courbe
illustrant l'orientation de la plateforme á.
Nous pouvons remarquer que les angles
qb2 et qb4 présentent des
irrégularités qui n'étaient pas présentes au
départ, cela est dû à l'influence de la distance
Dif (définit au paragraphe V.6.5. 1) présenté en
Fig.V.29.
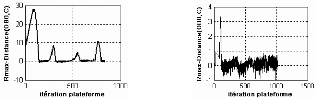
(a) (b)
Fig.V.29. Distance Dif : (a)
Dist=50Cm , (b) Dist=10Cm
· Trajectoire ellipsoïdale


(a) (b)
Fig.V.30. Planification trajectoire de la plateforme
mobile (Dist=50)
(a) Mouvement de la plateforme, (b)
Validation du modèle géométrique

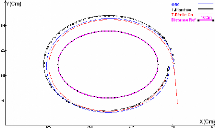
(a) (b)
Fig.V.31. Planification trajectoire de la plateforme
mobile (Dist=10Cm) (a) Mouvement de la plateforme,
(b) Validation du modèle géométrique
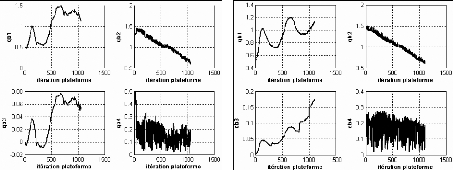
(a) (b)
Fig.V.32. Coordonnées
généralisées du bras manipulateur : (a)
Dist=50Cm, (b) Dist=10Cm.
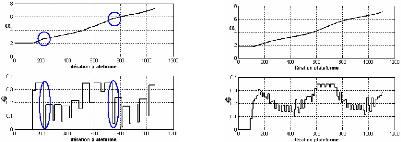
(a) (b)
Fig.V.33. Paramètres propres à la
plateforme (a) Dist=50Cm, (b) Dist=10Cm
Nous remarquons pour les deux exemples
précédents que les angles de rotation du bras manipulateur ne
présentent pas une évolution particulière ; par contre, le
comportement de la plateforme mobile est modifié, puisque l'angle de
braquage ? présente de très faibles variations, au
nombre important, lorsque Dist=10cm, contrairement au cas où
Dist=50cm, où les angles de braquage des roues
présentent de grandes variations, mais leurs nombre est moins
important.
L'angle á se présente comme moin
régulier pour Dist=50cm, cela coïncide avec une
évolution brusque de l'angle de braquage à certaines
périodes du mouvement illustré en Fig.V.33.a.
· Trajectoire circulaire
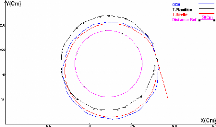
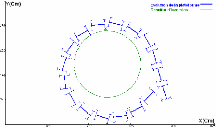
(a) (b)
Fig.V.34. Planification trajectoire de la plateforme
mobile (Dist=50Cm) (a) Mouvement de la plateforme,
(b) Validation du modèle géométrique

(a) (b)
Fig.V.35. Planification trajectoire de la plateforme
mobile (Dist=10Cm) (a) Mouvement de la plateforme, (b)
Validation du modèle géométrique
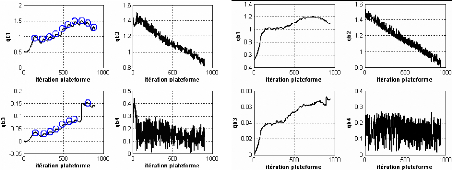
(a) (b)
Fig.V.36. Coordonnées
généralisées du bras manipulateur : (a) Dist=50Cm, (b)
Dist=10Cm.
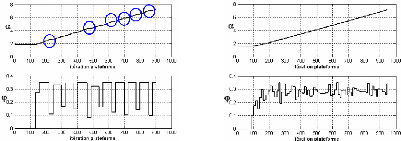
(a) (b)
Fig.V.37. Paramètres propres à la
plateforme : (a) Dist=50Cm, (b) Dist=10Cm
L'angle á apparaît comme quasiment
linéaire quand Dist=10cm, alors qu'il l'est moins quand
Dist=50cm ; cela se répercute sur l'évolution de la
configuration du système articulé. Nous pouvons remarquer que les
angles qb1 et qb3
présentent une évolution pas très lisse, ces variations
particulières coïncident avec les variations perçues dans
l'angle de braquage ?. Nous avons également pu remarquer que
dans la trajectoire relative à OB0
présentée en (Fig.34.a), le chemin généré
par la plateforme se présente comme une vague, cela est une
conséquence des changements survenus au niveau de la courbe
présentée sur la figure V.37.a. (comparée aux courbes
précédentes).
· Interprétation
Lorsque la distance entre les échantillons de
référence n'est pas très importante, le mouvement de la
plateforme suit très fidèlement la trajectoire planifiée,
alors que lorsque la valeur de Dist est importante, la plateforme
n'est pas apte à suivre le chemin prédéfini, et cela se
répercute sur le comportement des variables articulaires.
Quand la distance entre les échantillons de
référence est assez importante, l'angle ?
présente un nombre de variations restreint, cela est dû au
fait que la roue ne soit pas très souvent sollicitée pour
braquage, mais la variation que prend cet angle dans les phases de changements
d'angles est importante.
V.6.5.3. Modification de la position initiale de la
plateforme
Nous avons modifié dans cette partie le point de
départ de la plateforme, en faisant en sorte de placer le point de
départ de la base du bras manipulateur OB0 sur le
premier point de la trajectoire planifiée, comme cela est
présenté sur la figure V.38 pour les trois types de trajectoires
opérationnelles imposées. Nous allons illustrer les
coordonnées généralisées liées au bras
manipulateur pour les trois types de trajectoires opérationnelles
imposées.
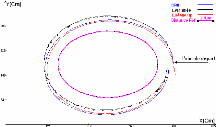
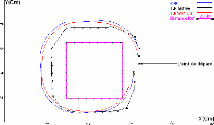
(a) (b)

(c)
Fig.V.38. Planification trajectoire et
mouvement de la plateforme mobile : (a)Trajectoire carrée,
(b)
Trajectoire ellipsoïdal, (c) Trajectoire circulaire
· Trajectoire carrée

Fig.V.39. Coordonnées
généralisées du bras manipulateur
· Trajectoire ellipsoïdale

Fig.V.40. Coordonnées
généralisées du bras manipulateur
· Trajectoire circulaire

Fig.V.41. Coordonnées
généralisées du bras manipulateur
· Interprétation
Nous pouvons remarquer pour ces trois trajectoires que le fait
de placer la plateforme mobile à un endroit précis modifie le
comportement du système articulé. Le problème de
dépassement des butées articulaires ne s'étant pas
présenté auparavant, le fait de modifier seulement la position
initiale pour le système mobile a permis d'atteindre les butées
articulaires au niveau de l'angle qb2, qui a
dépassé la valeur limite imposée par le système
articulé (qui est de l'ordre de 1.7 radians). Dans le cas
présent, qb2 présente une valeur de
départ supérieure à 2 radians pour les trois types de
trajectoires.
Tout au long de cette partie, nous avons pu constater que le
comportement du bras manipulateur était étroitement lié
à l'évolution de la plateforme mobile; nous tenons
également à signaler que l'erreur maximale Max(A-AD)
calculée par rapport à toutes les expériences
présentées précédemment est inférieure
à 2mm, ce qui signifie que l'approche adoptée permet un suivi de
la trajectoire opérationnelle imposée avec une grande
fidélité.
V.7.Modéle cinématique inverse
Nous allons étudier dans ce paragraphe le comportement
d'un manipulateur mobile, en imposant les positions et les vitesses pour chaque
échantillon [Xc Yc Zc X &
cY& c Z & c ]T.
Nous avons imposé la trajectoire opérationnelle en
fonction du temps. Les équations régissant cette trajectoire sont
[Xu05] :
Xc=DX+GR*C(2*ð*
t ) (5.1)
P
Yc=DY-PR*S(2*ð*
t ) (5.2)
P
Zc=ZP+0.1t (5.3)
Avec ZP=40+3 1.7cm, DX et DY
représentent l'abscisse et l'ordonnée du centre de
l'ellipse, GR et PR représentent respectivement le
rayon le plus grand et le moins grand de l'ellipse, et enfin P=360.
Le calcul des vitesses opérationnelles [X&
c Y& c Z & c ] T consiste
à dériver les expressions (5.1 -
5.3). La vitesse linéaire selon l'axe zr n'est
pas en fonction du temps, c'est une constante égale à 0.1
cm/s.
La planification de mouvement du système mobile
présentée en Fig.V.42. a pu être effectuée selon le
procédé exposé précédemment (dans le
paragraphe V.6.) ; nous constatons que les échantillons n'ont pas pu
être tous atteints, notre but n'est pas de valider le modèle
géométrique, mais d'étudier la cinématique, donc le
fait que le système soit inapte à suivre totalement la
trajectoire désirée importe peu. Le nombre d'échantillons
atteints est donc égal à 85 échantillons. L'estimée
initiale est Ang0= [0.5, 1.5, 0, 0. 14]T.
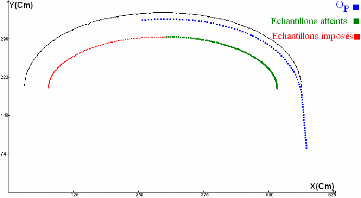
Fig.V.42. Planification de mouvement pour Trajectoire
opérationnelle imposée évoluant en fonction
du
temps
Nous allons présenter dans ce qui suit les
résultats concernant les différentes tâches additionnelles,
que nous avons évoqué dans le chapitre précèdent.
Nous imposons dans tous les cas comme première tâche additionnelle
la commande de mobilité çp, nous allons
tester dans ce qui suit les différents choix de la seconde tâche.
Aussi, nous allons évoquer une entité qui représente
Det( J), c'est le déterminant du manipulateur mobile,
et aussi Det(J.JT) qui représente
le déterminant du sous-système bras manipulateur, pour tester le
lien entre les résultats relatifs aux vitesses
généralisées et les singularités.
V.7.1.Choix numéro 1
La vitesse opérationnelle imposée A&
4 est égale à 0.

Fig.V.43. Vitesses généralisées du
bras manipulateur
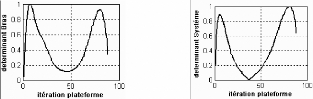
Fig.V.44.Prsentation des Déterminants
V.7.2.Choix numéro 2
La vitesse imposée q& b1
est égale à 0.1 rad/s.

Fig.V.45. Vitesses généralisées du
bras manipulateur
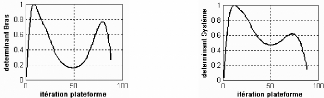
Fig.V. 46.Présentation des
Déterminants
V.7.3.Choix numéro3
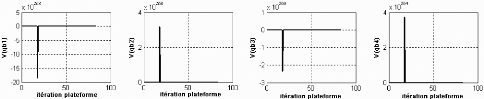
Fig.V.47. Vitesses généralisées du
bras manipulateur
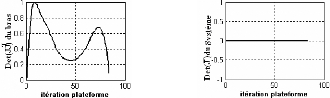
Fig.VI.48. Présentation des
Déterminants
· Interprétations
Les résultats obtenus ne présentent pas
véritablement de points communs, or, la vitesse relative à
l'angle qb4 est la même pour le premier et le second
choix, cela est dû au fait que la matrice jacobienne réduite
présente quatre lignes identiques ce qui se répercute sur le
résultat d'inversion de la matrice.
Nous avons pu constater que lorsque le déterminant du
système Det( J) diminue considérablement
jusqu'à être proche du zéro, alors, le comportement du
système articulé s'en ressent, même si le
déterminant du bras manipulateur
Det(J.JT) ne présente
particulièrement pas de résultats proches du zéro.
Nous allons dans ce qui suit commenter les résultats pour
chaque type de tâche additionnelle considérée.
o Choix numéro 1
Au niveau de l'itération numéro 38, nous
remarquons une évolution brusque pour les vitesses articulaires ; cela
coïncide avec le fait que le déterminant lié au
système frôle la valeur nulle, ce qui correspond à une
perte de rang dans la matrice jacobienne réduite, et de là le
système est considéré comme étant à
proximité d'une singularité. A ce niveau, les vitesses obtenues
dépassent les vitesses admissibles par les variables
généralisées.
En imposant la vitesse angulairesØ &
=0.012 relative au système articulé seul, nous remarquons
d'après Fig.VI.48 que nous évitons une augmentation brusque des
vitesses articulaires jusqu'à dépasser les limites admissibles.
Cela nous permet également de mieux commander le système, car
Ø& ne dépend pas de la vitesse de la
plateforme, et connaissant les vitesses généralisées
maximales, un choix de tâche additionnelle se faisant par rapport
à Ø & nous évite d'imposer une vitesse
supérieure à celle admise par le système.

Fig.VI.48. Présentation des
Déterminants
o Choix numéro 2
Ce choix de cette tâche additionnelle nous donne des
résultats très corrects, car Det( J) ne
frôle pas la singularité, aussi, les vitesses restent dans les
limites imposées par le système articulé ; mais en
introduction cette tâche, un inconvénient majeur se
présente, car un mauvais réglage dans la valeur de la vitesse
q& b1 nous ramène sur des vitesses
supérieures à celles
imposées par les système. o Choix
numéro 3
Ce choix donne des résultats très
médiocres, et cette tâche n'est pas intéressante car
Det( J) est nul, pour toute les configurations, ce qui fait
que la matrice perd effectivement un rang car la ligne ajoutée relative
à la vitesses opérationnelle X&E
est linéairement dépendante
avec une autre ligne appartenant à la jacobienne
réduite. V.8. Conclusion
Les résultats de la planification de trajectoire sont
très intéressants, vu que nous avons pu arriver à faire
suivre au système de manipulation mobile les trajectoires
opérationnelles imposées, en respectant le fait d'éviter
les butées articulaires, qui peuvent présenter un facteur
prépondérant. L'inconvénient majeur de l'approche
proposée est qu'il y a un certain nombre de paramètres qu'il faut
régler selon le type de trajectoire imposée, comme la distance
entre échantillons de référence, l'estimée pour les
systèmes articulés, ou encor, le rayon des échantillons de
référence. Nous avons également constaté que la
position de la plateforme mobile est un facteur prépondérant
influençant la trajectoire généralisée du
système articulé, obtenue après inversion du modèle
géométrique.
La méthode des tâches additionnelles est en
adéquation avec la méthode de planification de trajectoire que
nous avons adopté, nous avons eu à intégrer qu'une seule
ligne comme contrainte en vitesse, les résultats que nous avons obtenu
sont fort intéressants, puisque contrairement aux plateforme
différentielles portant un bras manipulateur [Fou98], une plateforme de
type voiture n'admet en aucun cas l'intégration d'une vitesse
opérationnelle X& E ,
Y&E ou
Z& E. Ceci nous permet de
considérer que la méthode des tâches
additionnelles est très pratique, mais elle doit
être manipulée avec une grande prudence, elle dépend du
système à étudier. Une étude préalable
concernant la matrice jacobienne réduite peut nous éviter des
résultats médiocres.
Conclusion Générale
Le travail présenté dans ce mémoire entre
dans le cadre d'une planification de trajectoire et de mouvement, basée
sur les modèles géométrique et cinématique, pour un
manipulateur mobile comportant un bras manipulateur à quatre
degrés de libertés, considéré comme redondant
relativement à une tâche se faisant dans un espace
opérationnel à trois dimensions. La plateforme mobile est un
véhicule non-holonome de type voiture.
Nous avons, dans une première partie
évoqué les caractéristiques propres aux systèmes
poly-articulés et mobiles, formant les manipulateurs mobiles, dans le
but d'avoir une connaissance générale sur les
spécificités de chaque sous-système.
Nous nous sommes ensuite intéressé à
l'étude de manipulateurs mobiles faisant partie de travaux de
recherches, où nous avons répertorié les robots selon
leurs caractéristiques, par rapport aux domaines dans lesquels ils
peuvent être utilisés.
La troisième partie fut consacrée à des
définitions techniques, afin d'expliquer les divers aspects
étroitement liés à la modélisation, ainsi
qu'à la planification, dans le but d'éclairer le lecteur sur une
certaine terminologie qui peut prêter à confusion.
Après avoir eu une vision globale sur les
propriétés des manipulateurs mobiles, nous avons
présenté la problématique posée, lorsqu'on
considère un système de manipulation mobile composé d'un
seul bras manipulateur redondant vis à vis de la tâche, et d'une
plateforme mobile non holonome; nous avons divisé notre étude en
deux parties : la première a consisté à traiter le
problème de la modélisation des système articulés
embarqués d'un point de vue géométrique, dans laquelle
nous avons présenté des procédés de calcul du
modèle géométrique direct lorsqu'il y a prise en compte
d'une trajectoire généralisée imposée, et nous nous
sommes intéressé à la stratégie de mise en oeuvre
du modèle inverse, quand la tâche consiste à faire suivre
une trajectoire opérationnelle imposée à l'organe
terminal. Dans la deuxième partie, nous nous sommes consacré
à l'étude cinématique des manipulateurs mobiles, avec
l'élaboration de la matrice jacobienne réduite propre à
notre système; cet aspect rentre dans le cadre du calcul du
modèle direct. Dans la même optique, nous avons
étudié la mise en oeuvre du modèle cinématique
inverse s'effectuant dans le cadre de l'accomplissement d'une tâche
à mouvements opérationnels imposés, où nous avons
finalement pu utiliser la matrice jacobienne augmentée comme outil,
étant en concordance avec la stratégie de planification de
trajectoire que nous avions illustrée précédemment.
Enfin, nous avons concrétisé les approches
auxquels notre intérêt s'est porté par des simulations,
où nous avons expérimenté la méthode de
planification de trajectoire. Nous avons constaté d'après les
résultats présentés que nous somme arrivés à
atteindre notre but, puisque nous somme parvenu à faire suivre à
l'organe terminal une trajectoire opérationnelle imposée, sachant
que les expérimentations se sont faites sur trois type de
trajectoires.
L'inconvénient majeur de la méthode proposée
reste le nombre important de paramètres à régler, selon le
type de mission imposée au manipulateur mobile.
Nous avons également considéré le
mouvement de notre manipulateur mobile, en présentant les
résultas relatifs à l'étude concernant le modèle
cinématique, et plus précisément aux choix des lignes
représentant les tâches additionnelles; nous nous somme
aperçu que certains problèmes qui ne sont pas apparus lors de
l'étude géométrique sont survenus à cause des
singularités.
Notre travail est tout de même susceptible
d'améliorations telles que :
-une implémentation sur des plateformes software, en
vue de visualisations en trois Dimensions, pour une meilleure perception des
mouvements du manipulateur mobile dans l'espace.
-évolution spatiale du système articulé
mobile dans un environnement encombré, en envisageant l'existence
d'obstacles.
-calcul du modèle cinématique en configuration en
considérant les vitesses des effecteurs de la plateforme (les roues).
-implémentation du travail présenté dans ce
mémoire sur un système réel.
Annexes
Annexe A : Modèle géométrique
Direct du système
articulé
Nous allons illustrer dans cette annexe les principales
étapes de calcul du modèle géométrique direct d'un
bras manipulateur, en utilisant la représentation de DenavitHartenberg,
ensuite nous présenterons les expressions analytiques des
coordonnées cartésiennes du bras Mitsubishi PA10 7CE.
A.1. Calcul du modèle géométrique
direct d'un bras manipulateur
Le modèle géométrique direct d'un bras
manipulateur a comme but de représenter la position et l'orientation de
l'organe terminal, relativement au repère se trouvant à la base
du bras manipulateur (OB0,x r 0,y r
0,zr0) d'après
Fig.A.1.
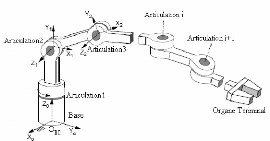
Fig.A.1 : Système de repérage relatif aux
articulations d'un bras manipulateur
L'élaboration du modèle
géométrique direct doit être accomplie en utilisant une
certaine paramétrisation des repères liés à chaque
articulation[Flü98] ; notre choix s'est porté sur celle de
Denavit-Hartenberg [Yam94] [Khl99] puisque c'est la plus utilisée, elle
est illustrée schématiquement en Fig.A.2 .
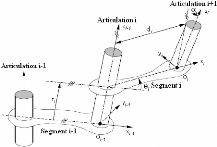
Fig.A.2 : Paramètres de
Denavit-hartenberg
Cette notation nous permet de représenter les
déplacements de l'articulation i relativement à
l'articulation i-1, grâce à une matrice de transformation
d'espace i-1Ti.
Sin( á
i i
)Sin( )
è
-
0 d
Sin( )
è i
Cos()Cos á i
i i i i i
Cos( )
è i
i1- Ti
Cos(á
Sin( )Sin( )
á è
i i
0
1
i
( ) Sin( ) r Sin( ) Ò
è á è
(A.1)
i i i i
- - ?
)Cos( ) Cos( ) r Cos( )
è á è ?
0 0 1 J
?
Comme cela est présenté en Fig.A.2, le passage du
repère Ri-1 au repère Ri s'exprime
en fonction de quatre paramètres [Yam94] [Khl99]:
ái : Angle entre les axes zi et
zi-1 correspondant à une rotation autour de
xi
di : Distance entre zi-1 et zi
le long de xi-1
èi : Angle entre les axes
xi-1 et xi correspondant à une rotation
autour de zi
ri : Distance entre xi-1 et
xi le long de zi
La position et l'orientation de l'organe terminal par rapport au
repère de référence seront donc calculées selon le
produit matriciel suivant :
0 T T . T .... - T
= (A.2)
0 1 n 1
n 1 2 n
La matrice de transformation d'espace résultante illustre
mathématiquement la situation de l'Organe Terminal relativement à
un repère de référence.

1
?
?
?
J
(A.3)
r x
u v
x x
w x
r y
w y
u y
v y
r z
u v
z z
w z
0 0 0 1
? ? ? ? ?
0Tn=
Les positions de l'organe terminal seront déduites de la
matrice présentée en (A.3) telles que :
XE=rx (A.4)
YE=ry (A.5)
ZE=rz (A.6)
Pour les rotations, nous allons utiliser une
représentation non redondante, c'est à dire avec trois
paramètres [Bay0 1] seulement, comme les angles d'Euler classiques
[Khl99] tels que:
r ATAN 2 w , w
x y
Ö ( )
( ) (A.7)
-
= ? - = + °
? ATAN 2 w , w 180
Ö
x y
È = ATAN 2 Sin Ö w x - Cos
Ö w y , w z
( ( ) ( ) ) (A.8)
Ø Ö Ö Ö Ö
= - - +
ATAN 2 Cos v Sin v , Cos u Sin u
( ( ) ( ) ( ) ( ) ) (A.9)
x y x y
Les matrices de transformations d'espaces sont utiles pour la
construction du modèle géométrique, où il est
adéquat de représenter l'évolution spatiale d'un corps
d'intérêt (dans le cadre de notre étude c'est l'
OT), relativement à un repère de
référence.
Tout au long de ce mémoire, nous avons
considéré les variables è liées aux
articulations du système articulé, comme étant les
coordonnées généralisées qbi
avec i=1 ...í (í étant le nombre
d'articulations appartenants au bras manipulateur).
A.2. Forme analytique du modèle
géométrique direct du bras Mitsubishi PA10 7CE : A.2.1. Matrices
de passage des différents repères du bras Mitsubishi PA10
7CE:
Les différentes matrices de passages relatives à
chaque articulation sont :
|
0T1=
|
-
C S 0 0 1
1 1
SC 0 0 Ò
1 1 Ò
,
0 0 10 Ò
?
|
1T2=
|
C2
0
S 2 0
|
0 0 0 1 J
, 2T3=
0 0 1 R
- - 3
S C 0 0
3 3
0 0 0 1
1 ? ? ? ? J
S 0 0
2
0 10
C 0 0
2
-
0 01
C 3
S 0 0
3
,
1 ? ? ? ? J

C S 0 0
4 4
-
C S 0 0
5 5
-
0 0 1
-
0 0 10
, 5T6=
, 4T5=
.
T4=
,6 T7=
3
R5
0 0
S C
4 4
-
S C
5 5
1 ? ? ? ? J
0 0 0 1
0 0 01
1 ? ? ? ? J
1 ? ? ? ? J
00
1 ? ? ? ? J
00
C S 0 0
7 7
-
0 0 1 0
-
S C 0 0
7 7
0 0 0 1
C S 0 0
6 6
-
0 0 1 0
S C
6 6
-
0 0 0 1
Sachant que Ri représente le paramètre
ri utilisé dans l'équation (A. 1) ; les symboles Si
et Ci désignent les sinus et cosinus de lange
qbi.
A.2.2. Matrice de transformation d'espace globale :
· Les deux premières colonnes :
C C C C C C C - C C C C S S - C C C S S C
7 6 5 4 3 2 1 7 6 5 4 3 1 7 6 5 4 2 1
- C C S S C C - C C S C S - C S S C C C
7 6 5 3 2 1 7 6 5 3 1 7 6 4 3 2 1
S C C C C C C S C C C S S
7 6 5 4 3 2 1 7 6 5 4 3 1
+
+ +
S C C S S C S C S S C C
7 6 5 4 2 1 7 6 5 3 2 1
+ C S S S S - C S C S C
7 6 4 3 1 7 6 4 2 1
- S S C C C C
7 5 4 3 2 1
+ +
S C S C S S S S C C C - S S S S S
+ +
S S C S S S S S S C - S C C S
7 5 4 3 1 7 5 4 2 1 7 5 3 1
7 6 5 3 1 7 6 4 3 2 1 7 6 4 3 1
S S C S C
7 6 4 2
+ +
1 7 5 4 3 2 1 7 5 4 3 1
- C S C C C C C S C S S
.
- S C S C C
7 5 3 2 1
+ C S S S C
7 5 4 2 1
- C C S C C - C C C S
7 5 3 2 1 7 5 3 1
+ S 7
C C C C C C S C C C C S C
7 6 5 4 3 2 1 7 6 5 4 3 1
+
- C C C S S S
7 6 5 4 2 1
- S C C C C C S - S C C C S C
7 6 5 4 3 2 1 7 6 5 4 3 1
C C S S S
6 5 4 2 1
C C S S C S C C S C C
7 6 5 3 2 1 7 6 5 3 1
+
- C C S C C S
7 6 5 3 2 1
+ +
S C S S C S - S C S C C S
7 6 5 3 2 1 7 6 5 3 1 7
S S C C S
6 4 3 2 1
C S S S C
7 6 4 3 1
- C S C S S
7 6 4 2 1
- S S C C C S
7 5 4 3 2 1
S S C S C S S S S S
7 5 4 3 1 7 5 4 2 1
+
- S C S C S
7 5 3 2 1
+ +
S C S S - C S C C C S
6 4 2 1 7 5 4 3 2 1
+ C 7
C C C
5 3 1
+ S C C C
7 5 3 1
S S S S C S
7 6 4 3 1 7
C C S C S
7 5 3 2 1
C S C S C C S S S S
7 5 4 3 1 7 5 4 2 1
+
- C C C C C S - C C C S C C C S S S
7 6 5 4 3 2 7 6 5 4 2 7 6 5 3 2
+
+ +
C S S C S - C S C C S S C C S
7 6 4 3 2 7 6 4 2 7 5 4 3 2
+ +
S S S C S C S S
7 5 4 2 7 5 2 3 S C C C C S S C C S C - S C S S S
7 6 5 4 3 2 7 6 5 4 2 7 6 5 3 2
+
S S S C S S S C C - C S C C S
7 6 4 3 2 7 6 4 2 7 5 4 3 2
+
C S S C C C S S
7 5 4 2 7 5 2 3
+
0 | 0
· Les deux dernières colonnes
:
R S C C C
5 4 3 2 1
+ R C S
3 1 2
- R S S S R C S C
5 4 3 1 5 4 2 1
+
- S S S C C
6 5 3 2 1
- C S S S C C S C
6 4 3 1 6 4 2 1
+
S C C C C C
6 5 4 3 2 1
- S S C S C S C C C
6 5 3 1 6 4 3 2 1
+
- S C C S S S C S S C
6 5 4 3 1- 6 5 4 2 1
S C C C C S S C C S C - S C S S S
6 5 4 3 2 1 6 5 4 3 1 6 5 4 2 1
+
S S S C S S S C C C S C C S
6 5 3 2 1 6 5 3 1 6 4 3 2 1
+ +
+ +
C S S C C C S S
6 4 3 1 6 4 2 1
- S C C C S
6 5 4 3 2
- S C S C S S S S
6 5 4 2 6 5 3 2
+
- C S C S C C C
6 4 3 2 6 4 2
+
R S C C S R S S C R C S S
5 4 3 2 1 5 4 3 1 5 4 2 1
+ +
+ R S S
3 2 1
-R5S4C3S2 +R5C4C2
+R3C2
0 | 1
Nous déduisons les coordonnées
opérationnelles cartésiennes de l'organe terminal, relativement
au repère (OB0 , x r B 0 , y r B0 , z
r B0) d'après la matrice présentée dans
le
paragrapheA.2.2 telles que :
XE = R5S4C3C2C1-R5S4S3S1+R5C4S2C1+R3C1S2
YE= R5S4C3C2S1+R5S4S3C1+R5C4S2S1+R3S2S1 ZE =
-R5S4C3S2+R5C4C2+R3C2
Annexe B : Modèle Cinématique Direct du
système
articulé
B.1.Présentation de la matrice jacobienne d'un bras
manipulateur
Pour un système articulé, le modèle
cinématique représente la relation entre les vitesses
opérationnelles x& et les vitesses
généralisées q& b.
Considérons le modèle géométrique d'un
robot possédant n degrés de
liberté, évoluant dans un espace à m dimensions
(m et n sont indépendants):
x1=f1(qb1, ... ,qbn)
:
: (B.1)
:
xm=fm(qb1, ..., qbn)
Où x représente le vecteur des
coordonnées opérationnelles, et qbi, le
vecteur des coordonnées généralisées du bras
manipulateur, aussi fi représente la fonction du modèle
géométrique liant les deux parties appartenant respectivement,
à l'espace opérationnel et à l'espace
généralisé. Nous pouvons simplifier l'écriture en
mettant (B. 1) sous forme vectorielle:
x=f(qb) (B.2)
Si nous dérivons l'équation (B.2), nous
obtenons:

=
?
? ? ?? xm
x1
& & : Ò Ò Ò J
1
1 ? ?
? J
1
? f1
? qb1
? fm
? qb1
? f1
? q bn
? fm
...
?qbn
1
? ?
? ?
? ?
? ?
? ? J
...
:
...
:
&
qb
:
&
qb n
(B.3)
1 44 2 44 3
J b
Nous définissons alors matrice jacobienne Jb
[Flü98] telle que :
La matrice jacobienne Jb représente un
opérateur permettant de lier les vitesses des corps d'un robot
exprimées dans différents espaces vectoriels [Flü98]. On
peut donc la voir comme étant l'opérateur reliant les vitesses
opérationnelles x& aux vitesses articulaires
q& bi.
Si les fonctions f1,....,fn sont non
linéaires, alors leurs dérivées partielles sont fonction
des qbi.. La matrice jacobienne est donc un opérateur
linéaire dépendant de la position instantanée du robot.
Le modèle cinématique direct d'un bras
manipulateur évoluant dans un espace à trois dimensions exprime
la relation entre les vitesses opérationnelles, qui sont au nombre de
six, et les vitesses généralisées, ayant un nombre de
variables lié au système articulé.
Pour un bras ayant comme nombre de coordonnées
opérationnelles égales à 6 (ce qui est suffisant pour
définir la position et l'orientation de l'organe terminal), nous avons
la représentation matricielle suivante :
X E
i
& r J J . . . . J
11 12 1ni ? q & b 1 i
? ?
Y E
& Ò
J J . . . . J
21 22 2n q & b 2
? ?
& J J . . . . J
Z E
31 32 3n Ò ? q & b 3
Ò
? ? ? ?
Ø & J J . . . . J
41 42 4n :
? (B.5)
? ?
?
È & Ò ? J J . . . . J
Ò ?
51 52 5n :
? ? ? ? ?
Ö & ] ? ? J J . . . . J
61 62 6n Ò ÿ ? ? q & b n
] 1 444 2 444 3
J b
Nous allons dans ce qui suit formuler une méthode de
calcul de la matrice jacobienne[Dao94] [Flü98].
B.2. Formation de la matrice jacobienne :
Il existe plusieurs méthodes de calcul de la matrice
jacobienne, définie dans l'équation (B.5), la méthode la
plus évidente réside sur le principe de la dérivation des
équations déduites du modèle géométrique
direct, l'inconvénient de cette approche est qu'elle soit liée
à la morphologie du robot manipulateur, et que les vitesses angulaires
ne correspondent pas aux dérivées des angles de rotation
Ø, È et Ö déduites du modèle
géométrique direct [Pad05].
Les autres méthodes de calcul du modèle
cinématique direct reposent sur le calcul des influences de chaque
articulation sur l'organe terminal. Ces méthodes se caractérisent
par le repère dans lequel la matrice jacobienne est exprimée,
ainsi que par le corps auquel elle correspond; le calcul de la matrice
jacobienne s'effectue souvent relativement à l'organe terminal, elle est
généralement exprimée dans le repère de la base du
bras RB0.
B.2.1. Calcul de la matrice jacobienne vectorielle Jn
:
L `influence de la kéme
articulation, ayant comme axe de déplacement définit par le
vecteur unitaire Wk, exprimant un accroissement infinitésimal
äqbk, provoque un accroissement infinitésimal
de position, et d'orientation notés respectivement äpk et
äök sur l'organe terminal selon Fig.B. 1.
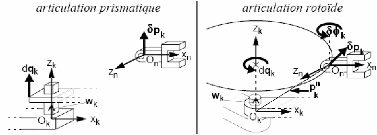
Fig.B.1 : Présentation des paramètres
äpj et äöj
Les vitesses äpk et äök sont
exprimées dans les équations suivantes (B.6 et B.7), selon le
type d'articulation provoquant le mouvement de l'organe terminal :
Liaison prismatique ? Liaison rotoïde
äpk=äqbk .Wk
äpk=(äqk .Wk )Ëp k n
(B.6) (B.7)
äök= 0
äök=äqki .Wk
Nous pouvons regrouper les équations (B.6) et (B.7) en
(B.8), pour ne considérer qu'une seule expression relative à
äpi et äöi, cette équation varie selon
le type de liaison considéré, en utilisant le paramètre
ók utile pour distinguer entre une articulation rotoïde ou
prismatique.
äpk= (ók Wk+(1-
ók) (WkËp n k ))
(B.8)
äök= (1-ók) Wk
äqk.
Sachant que : ók=0 si l'articulation 'k
courante est rotoïde, et ók=1 si l'articulation
'k est prismatique.
Nous avons représenté auparavant en
équation (B.8) l'influence de l'accroissement infinitésimal d'une
articulation sur le mouvement de l'organe terminal ; grâce au
théorème de la composition des vitesses, nous pouvons sommer les
contributions de toutes les vitesses articulaires afin de conclure sur les
vitesses linaires et angulaires de l'objet d'intérêt.
n
|
äp= ?=
k 1
n
äö= ?
k=1
|
(ók-1 Wk-1+(1- ók-1)
(Wk-1Ëp n k-1))
(1-ók-1) Wk-1 äqk-1.
|
(B.9)
|
De l'équation (B.9) nous parvenons à décrire
les colonnes de la matrice jacobienne telle que, si la liaison lk est
rotoïde, alors la ligne correspondante à l'articulation
s'écrit :
W p n
J (q ) Ë (B.10)
[ 1
k 1 k 1
- -
k W
= ?? ??
? k 1
- j
Si la liaison est prismatique, alors :
J (q ) k 1
[ W 1
k (B.11)
= -
?? 0 j
Sachant que p n k-1 représente la
position de l'organe terminal par rapport au centre du repère de
référence Ok-1 (centre du
repère numéro k-1).
Les équations (B. 10) et (B. 11) illustrent donc la
représentation de la kéme ligne de la matrice
jacobienne selon le type d'articulation considéré.
La matrice jacobienne est composées des n lignes
construites préalablement selon les
équations (B.10) et (B.1 1) Pour un bras manipulateur
à n degrés de libertés, il en résultera
donc la matrice Jb =[J1
Jn]T . cette matrice transforme les
déplacements élémentaires des
articulations en déplacements élémentaires
au niveau de l'organe terminal.
Nous allons dans ce qui suit proposer une méthode de
calcul de la jacobienne.
B.2.2.Construction des colonnes de la matrice jacobienne
Jb:
Dans cette partie, nous allons tester une méthode dans
laquelle nous allons déduire l'expression de la matrice jacobienne
à partir des équations (B. 10) et (B. 11), nous utiliserons les
matrices de transformations d'espaces [Dao94] présentées en
Annexe A.
Soit k-1T0 la matrice de passage
du repère R0 au repère Ri-1, le
paramètre Wk-1 doit être calculé pour
chaque colonne Jk. Les composantes de Wk-1
représentent les trois premiers éléments de la
troisième colonne de la matrice k-1T0.
Le calcul du paramètre p n k-1 se
déduit de l'opération p n 0 - p k 1
0 - avec :
Le paramètre p n 0 constitue les trois
éléments de la dernière colonne de la matrice
nT0, il représente la position de l'organe
terminal par rapport au repère RB0 exprimé
dans RB0, il en est de même pour p k 1
0-qui est composé des trois derniers
éléments de la matrice k-1T0. Il
faut donc calculer toutes les matrices de transformation
k-1Tn avec k variant de 1
à n.
B.2.3. Forme analytique des vitesses
opérationnelles linéaires du bras Mitsubishi PA10 7CE
Puisque nous avons pu déduire les coordonnées
cartésiennes du bras manipulateur, nous pouvons les dériver et
construire de ce fait les vitesses opérationnelles en positions, qui
sont telles que :
X& E =
(-R5S1C2C3S4-R5C1S3S4-R5C4S2S1-R3S1S2) q&
b1 + (-R5S4C3C1S2+ R5C4C1C2+
R3C1C2) q& b2 + (-R5S4C1C2S3-R5S4S1C3)
q& b3 + (R5C4C3C2C1-R5C4S3S1-R5S4C1S2) q& b4.
Y&E =
(R5S4C3C2C1-R5S1S3S4+R5C4S2C1+R3C1S2) q&
b1 + (-R5S4C3S1S2+ R5C4S1C2 +R3S1 C2) q&
b2 + (-R 5S4S1 C2S3+R5S4C1 C3) q& b3 +
(R5C4C3C2S1+R5C4S3C1-R5S4S1S2) q& b4.
Z& E = (-R5S4C3C2-R5C4S2-R3S2)
q& 2 + (R5S4S2S3) q& 3 + (-R5C4C3S2-R5C2S4)
q& b4.
Ce résultat peut être utilisé pour valider
les résultats liés au modèle cinématique direct,
par calcul direct de la jacobienne.
Annexe C : Caractéristiques des
éléments du
manipulateur mobile
Nous allons présenter dans cette annexe les
caractéristiques du système articulé et de la plateforme
mobile étudiés dans ce mémoire.
C.1. Caractéristiques du bras manipulateur
· Présentation de l'espace de travail du
Mitsubishi PA10 7CE
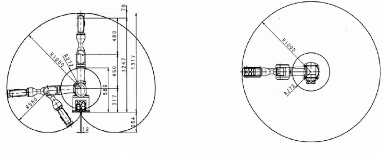
Fig.C.1.Espace de travail du manipulateur
Mitsubishi
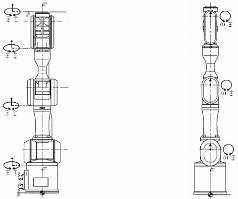
Fig.C.2.Sens de rotation des différentes
articulations du bras Mitsubishi.
Dans cette annexe, tous les angles sont présentés
en degrés, aussi les vitesses angulaires sont considérées
en degrés/seconde
· Paramètres de Denavit-Hartenberg du
Mitsubishi
ái ai di èi
0 0 0 è1 Articulation 1
-90 0 0 è2 Articulation 2
|
|
|
|
Annexe C
|
90
|
0
|
0.45
|
è3
|
Articulation 3
|
-90
|
0
|
0
|
è4
|
Articulation 4
|
90
|
0
|
0.48
|
è5
|
Articulation 5
|
-90
|
0
|
0
|
è6
|
Articulation 6
|
90
|
0
|
0
|
è7
|
Articulation 7
|
|
· Angles de rotations limites admises par le
bras manipulateur
Limite inférieure
|
Limite supérieure
|
|
-180
|
180
|
Articulation 1
|
-97
|
97
|
Articulation 2
|
-180
|
180
|
Articulation 3
|
-143
|
143
|
Articulation 4
|
-270
|
270
|
Articulation 5
|
-180
|
180
|
Articulation 6
|
-270
|
270
|
Articulation 7
|
|
· Vitesses limites admises par le bras
manipulateur
57 Articulation 1
57 Articulation 2
114 Articulation 3
114 Articulation 4
360 Articulation 5
360 Articulation 6
360 Articulation 7
· Résolution minimale du bras
manipulateur
L'angle minimal admis par toutes les articulation est de l'ordre
de 0.05 degrés. C.2. Caractéristiques de la plateforme
mobile
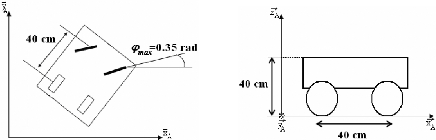
Fig.C.3. Paramétres relatifs à la
plateforme mobile
Références Bibliographiques
[Bay01] B.Bayle, «Modélisation et commande
cinématiques des manipulateurs mobiles
à roues«, Thèse de Doctorat, LAAS-CNRS,
Université Paul Sabatier de Toulouse, France, 2001.
[Bay02] B.Bayle, J.-Y. Fourquet, M. Renaud,
«Génération des mouvements des
Manipulateurs Mobiles : Etat de l'art et perspectives«.
Journal Européen des Systèmes Automatisés, vol
35, 809-845, 2001.
[Bay05] B.Byle, «Cours de Robotique», Ecole Nationale
Supérieure de Physique de
Strasbourg, 2005.
Web:
http://eavr.u-strasbg.fr/~bernard/education/ensps_3a/poly_3a.pdf
[Bel01] S.Bellakhehal, «génération de
mouvements et commande coordonnée d'un
robot manipulateur mobile«, mémoire de Magister,
Université de Blida, 2001. [Bou93] M.Boumahrat,
A.Gourdin,»Méthodes numériques Appliquées: Avec
nombreux
problémes résolus en Fortran 77», Office
des Publications Universitaires, 1993. [Coi86] P.Coiffet, «La
Robotique- Principes et Applications-Robots», Editions
Hérmes,
Traitet des nouvelles téchnologies,
Série Robotique, 1986.
[Dao94] A.Daoudi, «Conception et réalisation d'un
outil d'aide à la modélisation en
robotique«, Mémoire de Magister, USTHB, 1994.
[Dom01] E.Dombre, «Analyse des robots manipulateurs«,
Edition Lavoisier, 2001.
[Fil05] D.Filliat, «Robotique Mobile-Cours C 10-2«,
Ecole Nationale Supérieure de
Techniques Avancées (ENSTA), France, 2005. Web:
http://www.ensta.fr/~filliat/Courses/Polys/PolyRobotiqueMobile2006.pdf
[Flü98] L.Flückiger, «Interface pour le pilotage et l'analyse
des robots basée sur un
générateur de cinématique«,
Thèse de doctorat des sciences techniques,
école Polytechnique
fédérale de Lausanne, Suisse, 1998.
[Fou98] G.Foulon, «Génération de mouvements
Coordonnés pour un ensemble
constitué d'une plateforme mobile à roues et
d'un bras manipulateur«, Thèse de Doctorat, LAAS-CNRS, Institut
National des Sciences Appliquées, Toulouse, France, 1998.
[Fru05] M.Fruchard, «Méthodologies pour la commande
de manipulateurs mobiles
non-Holonomes«, Thèse de Doctorat, Inria Sophia
Antipolis, Ecole Nationale supérieure des Mines de Paris-Sophia
Antipolis, France, 2005.
[Gin03] R.Ginhoux, «Compensation des mouvements
physiologiques en chirurgie
robotisée par commande prédictive«,
Thèse de Doctorat, université Louis Pasteur, Strasbourg, France,
2003.
[Gor84] B.Gorla, M.Renault, «Modèles des robots
manipulateurs : application à leurs
Commandes«, Editions Cepadues, 1984.
[Hol99] R.Holmberg, O.Khatib; «Development of a holonomic
mobile robot for mobile
manipulation Tasks«, in Proc FSR '99 Int Conf,
Field and Service Robotics, Pittsburgh, PA, 1999.
[Hoo91] N.A.Hootsmans, S.Dubowsky, «Large Motion Control of
Mobile Manipulators
Including Vehicle Suspension Characteristics,» Proc.
Int. Conference on Robotics and Automation, Sacramento, CA, 2336-2341,
1991.
[Hu04] Y.M.Hu, B.H.Guo, «Modelling and Motion Planning of a
three link wheeled
mobile Manipulator» 8th Int Conf.
Control, Automation, Robotics and Vision, Chine, 2004.
[Kan01] S.Kang, K.Komoriya, K.Yokoi, T.Koutoku, K.Tanie ,
«Utilization of Inertial
Effect in Damping-based Posture Control of Mobile
Manipulator», IEEE Int Conf, Robotics & Automation, Seoul,
Korè, Mai 21-26, 2001.
[Kha96] 0. Khatib, K. Yokoi, K. Chang, D. Ruspini, R. Holmberg,
A. Casal,
«Vehicle/Arm Coordination and Multiple Mobile Manipulator
Decentralized Cooperation», in Froc IROS'96, Inte. Conf.
intelligent robots and systems, Osaka, japan, Novembre 4-8, 1996.
[Khl99] W.Khalil, E.Dombre, «Modelisation, Identification et
Commande de Robots«,
Editions Hermés, 1999.
[Kor03] M.H.Korayem, H Gharibun, «Maximum allowable load on
wheeled mobile
manipulators imposing redundancy constraints», elsevier
trans, Robotics and Autonomous systems, vol 44,151-159, 2003.
[Kun03] Y.Kunii, Y.Kuroda,T.Kubota, « Development of
micro-manipulator for tele
science by lunar rover: Micro5, »elsevier trans.
Acta Astronautica, vol 52, 433 - 439, 2003.
[Lae97] T.Laengle, T.Hoeniger, U.Rembold, H.Woern,
«Cooperation in Human-Robot-
Teams», in Froc ICI&C '97, Int. Conf.
Informatics and Control, St. Petersburg, Russie, Juin 9-13, 1997.
[Lav01] M.H.Lavoie, »Solution par optimisation
numérique du problème géométrique
inverse de manipulateur mobile sériels redondants pour
des opérations de transport dans un espace encombré»,
Maîtrise des sciences appliquées, Faculté
d'ingénierie, Université de Moncton, Canada, Octobre 2001.
[Luc03] P.Lucidarme, «Apprentissage et adaptation pour des
ensembles de robots
Réactifs Coopérants«, Thèse de
Doctorat, université de Montpelier II, Montpelier, France, 2003.
[Mas01] D. Balkcom, M. Mason, «Progress in Desktop Robotics
«, The 11thYale
Workshop on Adaptive and Learning Systems, 2001.
[Mbe05] J.B.Mbede, P.Ele, C.M. Mveh-Abia, Y.Toure,V.Graefe, S.Ma,
«Intelligent
mobile manipulator navigation using adaptive neuro-fuzzy
systems», elsevier trans. Infirmation Sciences, vol 171,
447-474, 2005.
[Mic04] M.Michelin, «Contribution à la commande de
robots pour la chirurgie mini-
invasive«, Thèse de doctorat, LIRMM,
Université Montpellier II, Montpellier, France, 2004.
[Nen04] D.N.Nenchev,Y.Tsumaki, M.Takahashi,
«Singularity-Consistent Kinematic
Redundancy Resolution for the S-R-S Manipulator», in
Froc 2004 IEEE/RSJ Int. Conf. Intelligent Robots and
Systems, Sendai, Japan, 28 Septembre- 2 Octobre, 2004.
[Otm00] S.Otman, «Télétravail Robotisé
et Réalité Augmentée : Application à la
Télé-
opération via Internet«, Thèse de Doctorat,
Laboratoire des Systèmes Complexes du CEMIF (Centre d'Etude de
Mécanique d'Ile de France), Université d'Evry-Val-d'Essonne,
France, 2000.
[Pac03] R.T.Pack, «IMA: The Intelligent Machine
Architecture», Université de
Vanderbilt, Thése de PhD, Nashville, Tennessee, USA,
2003.
[Pad05] V.Padois, «Enchainenemts dynamiques de Tâches
pour des manipulateurs
mobiles à roues«, Thèse de Doctorat,
Laboratoire Génie de Production de l'Ecole Nationale d'Ingénieurs
de Tarbes, Institut national polytechnique de Toulouse,France, 2005.
[Pap00] E.Papadopoulos, J.Poulakakis, «Planning And
Model-Based Control for
Mobile Manipulators», in Proc IROS 2000 Conf.
Intelligent Robots and Systems, Takamatsu, Japan, 2000.
[Pho04] C.Pholsiri, «Task-Based decision making and control
of robotic manipulators«,
thèse de PhD, Université du Texas, Austin, USA,
2004.
[Poi96] A.Poyet, «Contrôle redondant de la position
d'un robot par capteurs externes,
Applications en milieux médical et industriel«,
thèse de Doctorat, Institut National Polytechnique de Grenoble,
Grenoble, France, 1996.
[Pru96] A.Pruski, »Robotique mobile: La planification
de trajectoire», Hermes Sciences
Publications, Collection : Traité des nouvelles
Technologies. Série Robotique, 21 Septembre, 1996.
[Pru88] A. Pruski, «Robotique Générale«,
Edition ellipse, 1988.
[Ser95] H. Seraji: «Configuration Control of Rover Mounted
Manipulators», in Proc
IEEE Int. Conf. Robotics and
Automation, Nagoya, Japan, 2261-2266, 1995.
[Sha04] W.Shan, K.Nagatani, Y.Tanaka, «Motion planning
for Mobile Manipulator to Pick up an Object while Base Robot's Moving»,
Int Conf, Robotics and Biomimetics, Shenyang, Chine, août 22-26
2004.
[Swi03] W.schmitz, «Robotic paint stripping of large
aircraft a reality with the flashjet
coating removal process». Conf, Aerospace
coating removal and coating, USA, mai 20-22, 2003.
[Too01] W.-S.Too, J.-D. Kim, S.-J.Na, «A study on a mobile
platform-manipulator
welding system of horizontal fillet joints», pergamon
trans. Mechtronics, vol 11, 853-868, 2001.
[Vib87] C.Vibet, «Robots Principes et Contrôle«,
Editions ellipse, 1987.
[Waa03] B.J.W. Waarsing, M. Nuttin, H. Van Brussel,
«Behaviour-based mobile
manipulation: the opening of a door», 1st
International workshop on advances in Services Robotics, Bardolino,
Italie, mars 13-15, 2003.
[Xu05] D.Xu, H.HuCarlos, A.A.Calderonand, M. Tan, «Motion
Planning for a Mobile
Manipulator with Redundant DOFs» in Proc ICIC'05
Int. Conf. Intelligent Computing, China, 23-26
August, 2005.
[Yam93] Y.Yamamoto, X.Yun, »Coordinating Locomotion and
Manipulation of a
Mobile Manipulator», in Proc. IEEE Inte.
Conf. Robotics and Automation, USA,157-181, Mai 1993.
[Yam94] Y.Yamamoto,» Control and Coordination of Locomotion
and Manipulation
of a Wheeled Mobile Manipulator», Thèse de PhD,
Université de Pennsylvanie, USA, 1994.
[Yu02] Qing Yu, I-Ming Chen, «A General Approach to the
Dynamics of
Nonholonomic Mobile Manipulator Systems», vol. 124,
Transactions of the ASME, 5 12-521, 2002.


