Elaboration d'une stratégie de coordination de mouvements pour un manipulateur mobile redondant( Télécharger le fichier original )par Isma Akli USTHB - Magister 2007 |

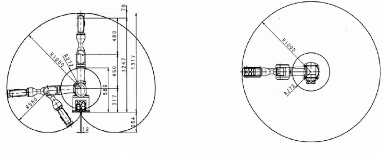
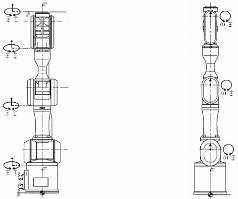
Annexe C : Caractéristiques des éléments dumanipulateur mobile Nous allons présenter dans cette annexe les caractéristiques du système articulé et de la plateforme mobile étudiés dans ce mémoire. C.1. Caractéristiques du bras manipulateur
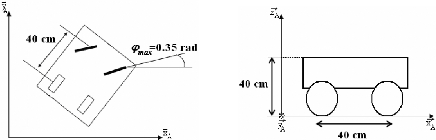
L'angle minimal admis par toutes les articulation est de l'ordre de 0.05 degrés. C.2. Caractéristiques de la plateforme mobile
Fig.C.3. Paramétres relatifs à la plateforme mobile Références Bibliographiques [Bay01] B.Bayle, «Modélisation et commande cinématiques des manipulateurs mobiles à roues«, Thèse de Doctorat, LAAS-CNRS, Université Paul Sabatier de Toulouse, France, 2001. [Bay02] B.Bayle, J.-Y. Fourquet, M. Renaud, «Génération des mouvements des Manipulateurs Mobiles : Etat de l'art et perspectives«. Journal Européen des Systèmes Automatisés, vol 35, 809-845, 2001. [Bay05] B.Byle, «Cours de Robotique», Ecole Nationale Supérieure de Physique de Strasbourg, 2005. Web: http://eavr.u-strasbg.fr/~bernard/education/ensps_3a/poly_3a.pdf [Bel01] S.Bellakhehal, «génération de mouvements et commande coordonnée d'un robot manipulateur mobile«, mémoire de Magister, Université de Blida, 2001. [Bou93] M.Boumahrat, A.Gourdin,»Méthodes numériques Appliquées: Avec nombreux problémes résolus en Fortran 77», Office des Publications Universitaires, 1993. [Coi86] P.Coiffet, «La Robotique- Principes et Applications-Robots», Editions Hérmes, Traitet des nouvelles téchnologies, Série Robotique, 1986. [Dao94] A.Daoudi, «Conception et réalisation d'un outil d'aide à la modélisation en robotique«, Mémoire de Magister, USTHB, 1994. [Dom01] E.Dombre, «Analyse des robots manipulateurs«, Edition Lavoisier, 2001. [Fil05] D.Filliat, «Robotique Mobile-Cours C 10-2«, Ecole Nationale Supérieure de Techniques Avancées (ENSTA), France, 2005. Web: http://www.ensta.fr/~filliat/Courses/Polys/PolyRobotiqueMobile2006.pdf [Flü98] L.Flückiger, «Interface pour le pilotage et l'analyse des robots basée sur un générateur de cinématique«,
Thèse de doctorat des sciences techniques, [Fou98] G.Foulon, «Génération de mouvements Coordonnés pour un ensemble constitué d'une plateforme mobile à roues et d'un bras manipulateur«, Thèse de Doctorat, LAAS-CNRS, Institut National des Sciences Appliquées, Toulouse, France, 1998. [Fru05] M.Fruchard, «Méthodologies pour la commande de manipulateurs mobiles non-Holonomes«, Thèse de Doctorat, Inria Sophia Antipolis, Ecole Nationale supérieure des Mines de Paris-Sophia Antipolis, France, 2005. [Gin03] R.Ginhoux, «Compensation des mouvements physiologiques en chirurgie robotisée par commande prédictive«, Thèse de Doctorat, université Louis Pasteur, Strasbourg, France, 2003. [Gor84] B.Gorla, M.Renault, «Modèles des robots manipulateurs : application à leurs Commandes«, Editions Cepadues, 1984. [Hol99] R.Holmberg, O.Khatib; «Development of a holonomic mobile robot for mobile manipulation Tasks«, in Proc FSR '99 Int Conf, Field and Service Robotics, Pittsburgh, PA, 1999. [Hoo91] N.A.Hootsmans, S.Dubowsky, «Large Motion Control of Mobile Manipulators Including Vehicle Suspension Characteristics,» Proc. Int. Conference on Robotics and Automation, Sacramento, CA, 2336-2341, 1991. [Hu04] Y.M.Hu, B.H.Guo, «Modelling and Motion Planning of a three link wheeled mobile Manipulator» 8th Int Conf. Control, Automation, Robotics and Vision, Chine, 2004. [Kan01] S.Kang, K.Komoriya, K.Yokoi, T.Koutoku, K.Tanie , «Utilization of Inertial Effect in Damping-based Posture Control of Mobile Manipulator», IEEE Int Conf, Robotics & Automation, Seoul, Korè, Mai 21-26, 2001. [Kha96] 0. Khatib, K. Yokoi, K. Chang, D. Ruspini, R. Holmberg, A. Casal, «Vehicle/Arm Coordination and Multiple Mobile Manipulator Decentralized Cooperation», in Froc IROS'96, Inte. Conf. intelligent robots and systems, Osaka, japan, Novembre 4-8, 1996. [Khl99] W.Khalil, E.Dombre, «Modelisation, Identification et Commande de Robots«, Editions Hermés, 1999. [Kor03] M.H.Korayem, H Gharibun, «Maximum allowable load on wheeled mobile manipulators imposing redundancy constraints», elsevier trans, Robotics and Autonomous systems, vol 44,151-159, 2003. [Kun03] Y.Kunii, Y.Kuroda,T.Kubota, « Development of micro-manipulator for tele science by lunar rover: Micro5, »elsevier trans. Acta Astronautica, vol 52, 433 - 439, 2003. [Lae97] T.Laengle, T.Hoeniger, U.Rembold, H.Woern, «Cooperation in Human-Robot- Teams», in Froc ICI&C '97, Int. Conf. Informatics and Control, St. Petersburg, Russie, Juin 9-13, 1997. [Lav01] M.H.Lavoie, »Solution par optimisation numérique du problème géométrique inverse de manipulateur mobile sériels redondants pour des opérations de transport dans un espace encombré», Maîtrise des sciences appliquées, Faculté d'ingénierie, Université de Moncton, Canada, Octobre 2001. [Luc03] P.Lucidarme, «Apprentissage et adaptation pour des ensembles de robots Réactifs Coopérants«, Thèse de Doctorat, université de Montpelier II, Montpelier, France, 2003. [Mas01] D. Balkcom, M. Mason, «Progress in Desktop Robotics «, The 11thYale Workshop on Adaptive and Learning Systems, 2001. [Mbe05] J.B.Mbede, P.Ele, C.M. Mveh-Abia, Y.Toure,V.Graefe, S.Ma, «Intelligent mobile manipulator navigation using adaptive neuro-fuzzy systems», elsevier trans. Infirmation Sciences, vol 171, 447-474, 2005. [Mic04] M.Michelin, «Contribution à la commande de robots pour la chirurgie mini- invasive«, Thèse de doctorat, LIRMM, Université Montpellier II, Montpellier, France, 2004. [Nen04] D.N.Nenchev,Y.Tsumaki, M.Takahashi, «Singularity-Consistent Kinematic Redundancy Resolution for the S-R-S Manipulator», in Froc 2004 IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Sendai, Japan, 28 Septembre- 2 Octobre, 2004. [Otm00] S.Otman, «Télétravail Robotisé et Réalité Augmentée : Application à la Télé- opération via Internet«, Thèse de Doctorat, Laboratoire des Systèmes Complexes du CEMIF (Centre d'Etude de Mécanique d'Ile de France), Université d'Evry-Val-d'Essonne, France, 2000. [Pac03] R.T.Pack, «IMA: The Intelligent Machine Architecture», Université de Vanderbilt, Thése de PhD, Nashville, Tennessee, USA, 2003. [Pad05] V.Padois, «Enchainenemts dynamiques de Tâches pour des manipulateurs mobiles à roues«, Thèse de Doctorat, Laboratoire Génie de Production de l'Ecole Nationale d'Ingénieurs de Tarbes, Institut national polytechnique de Toulouse,France, 2005. [Pap00] E.Papadopoulos, J.Poulakakis, «Planning And Model-Based Control for Mobile Manipulators», in Proc IROS 2000 Conf. Intelligent Robots and Systems, Takamatsu, Japan, 2000. [Pho04] C.Pholsiri, «Task-Based decision making and control of robotic manipulators«, thèse de PhD, Université du Texas, Austin, USA, 2004. [Poi96] A.Poyet, «Contrôle redondant de la position d'un robot par capteurs externes, Applications en milieux médical et industriel«, thèse de Doctorat, Institut National Polytechnique de Grenoble, Grenoble, France, 1996. [Pru96] A.Pruski, »Robotique mobile: La planification de trajectoire», Hermes Sciences Publications, Collection : Traité des nouvelles Technologies. Série Robotique, 21 Septembre, 1996. [Pru88] A. Pruski, «Robotique Générale«, Edition ellipse, 1988. [Ser95] H. Seraji: «Configuration Control of Rover Mounted Manipulators», in Proc IEEE Int. Conf. Robotics and Automation, Nagoya, Japan, 2261-2266, 1995. [Sha04] W.Shan, K.Nagatani, Y.Tanaka, «Motion planning for Mobile Manipulator to Pick up an Object while Base Robot's Moving», Int Conf, Robotics and Biomimetics, Shenyang, Chine, août 22-26 2004. [Swi03] W.schmitz, «Robotic paint stripping of large aircraft a reality with the flashjet coating removal process». Conf, Aerospace coating removal and coating, USA, mai 20-22, 2003. [Too01] W.-S.Too, J.-D. Kim, S.-J.Na, «A study on a mobile platform-manipulator welding system of horizontal fillet joints», pergamon trans. Mechtronics, vol 11, 853-868, 2001. [Vib87] C.Vibet, «Robots Principes et Contrôle«, Editions ellipse, 1987. [Waa03] B.J.W. Waarsing, M. Nuttin, H. Van Brussel, «Behaviour-based mobile manipulation: the opening of a door», 1st International workshop on advances in Services Robotics, Bardolino, Italie, mars 13-15, 2003. [Xu05] D.Xu, H.HuCarlos, A.A.Calderonand, M. Tan, «Motion Planning for a Mobile Manipulator with Redundant DOFs» in Proc ICIC'05 Int. Conf. Intelligent Computing, China, 23-26 August, 2005. [Yam93] Y.Yamamoto, X.Yun, »Coordinating Locomotion and Manipulation of a Mobile Manipulator», in Proc. IEEE Inte. Conf. Robotics and Automation, USA,157-181, Mai 1993. [Yam94] Y.Yamamoto,» Control and Coordination of Locomotion and Manipulation of a Wheeled Mobile Manipulator», Thèse de PhD, Université de Pennsylvanie, USA, 1994. [Yu02] Qing Yu, I-Ming Chen, «A General Approach to the Dynamics of Nonholonomic Mobile Manipulator Systems», vol. 124, Transactions of the ASME, 5 12-521, 2002. |
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||