5.4.2.1. Technique étudiée
L'image de référence peut être la moyenne
des N images précédentes de la séquence
(disponible publiquement). Pour calculer cette image, on crée un tableau
d'images buf dans lequel on copie ces N images. Ce tableau a
une taille fixe, il contient N images monochromes et la ieme
image buf[i] se manipule comme n'importe quelle image.
Pour accéder en lecture ou en écriture à
ces images, on déclare un entier last indexant l'instant t
: buf[last] est ainsi l'image courante. Une fois enregistrées les
N premières images du tableau buf, (buf[i]
pour i allant 0 à N-1), la N+Ieme image
de la séquence doit être stockée en début de tableau
écrasant l'ancienne valeur de buf[0], l'image suivante à
t=N+2 écrase buf[1] etc......L'image de la
séquence est donc à stocker à la position last +1
modulo N du buffer buf. On calcule ensuite la moyenne
mobile en deux étapes, la somme des N images cvAcc est
calculée en premier, ce qui nécessite une image codée sur
32 bits pour stocker ce résultat intermédiaire. Et puis la
division de cette image par l'entier N est réalisé en
même temps que sa conversion en image codée sur 8 bits.
5.4.2.2. Schéma d'implémentation
La modélisation de l'arrière-plan d'une
scène par la méthode proposée par (Kim et
al,2004) est devenue une référence de plus en
plus utilisée dans les domaines de la détection d'objets mobiles.
Cette méthode est robuste et efficace dans un grand nombre de cas
d'utilisation, y-compris les arrière-plans dynamiques (tels que les
feuillages, les fontaines, les bords de mers, les drapeaux...) et les
légers changements d'illumination.
54
L'observation préalable de cet algorithme est que les
fausses détections sont généralement situées dans
les zones sombres de l'image. Or, les couleurs sombres (et donc moins
lumineuses) sont par nature plus difficiles à différencier et
conduisent à une incertitude plus grande sur leur classification finale
(fond ou forme). Ainsi, on suppose que la luminosité devrait être
un facteur important dans la comparaison des ratios de couleurs entre deux
pixels. Le code source de programme implémenté se trouve en
annexe B.
5.4.2.3. Résultats et Discussions
On observe également au fil du temps que la couleur
d'un pixel donné est distribuée sur une droite alignée
avec l'origine (0,0,0). Ces observations motivent la création d'un
nouveau modèle de couleur permettant une évaluation
séparée de la distorsion de la couleur et de la luminosité
du pixel.
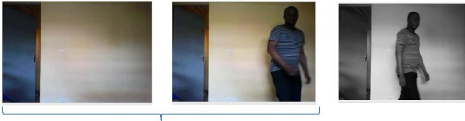
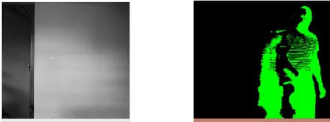
a) Images de références b) image en niveau de
gris
a) Image Moyen mobile de la scène d) image
détectée binarisée et seuillée
Figure 24 : Détection de mouvement par moyen
mobile
Les images issues de résultats de la méthode de
détection par la moyenne mobile, nous donne cinq images dont :
L'image a) est constituée de deux images
considérées comme image de référence a deux
instants différents : l'instant t, alors que l'image où
on ne détecte pas une personne en
55
mouvement et à l'instant t+1 ; où on
détecte une personne en nouement dans la scène. La
différence entre ces instants qui nous permettra de faire la moyenne
d'image acquise plus tard entre l'image à l'instant t et celle
à l'instant t+1.
L'image b) est celle transformée en niveau de gris. La
transformation d'image en niveau de gris a pour objectif de convertir les
images couleur en image binaire où la luminance et la chrominance sont
nulles.
L'image c) montre la moyenne de la différence entre
l'image de référence à l'instant t et celle
à l'instant t+1, notre objectif atteint ici est le fait de
n'est rien voir sur cette image alors qu'en réalité nous avons
des activités de détection. En faisant la moyenne entre les
images à l'instant t et à l'instant t+1, on appelle une fonction
spécifique de la bibliothèque OpenCv pour annuler l'ensemble de
pixel en mouvement et ainsi, nous aurons une image où ne bouche ;
appelée image de la moyenne d'images.
L'image d) est obtenue après la détection de la
moyenne d'image, comme étant présentée sur l'image c), le
résultat est binarisée et seuillée. Nous observons la
personne après détection, binarisation et seuillage mais avec une
tache qui ne permet pas de spécifier la personne comme dans les autres
cas.
Par contre la présence d'ombre peut entrainer une
fausse détection dans certain cas : la présence d'ombre est
considérée comme une seconde personne. Pour une bonne vision,
nous devons éliminer la présence de l'ombre par la méthode
de seuillage manuel tout en ajustant le niveau de seuillage voulu en fonction
de curseur.
| 

