II-1 ÉTUDE DE LA PARTIE MÉCANIQUE
La partie mécanique comporte plusieurs
éléments déclarés indispensables pour la mise en
service de notre moyen de transport. Elle regroupe en son sein l'entrainement
principal, le réducteur. avec le concours des deux freins, des deux
dynamos tachymétriques, des cabines et des différents
câbles participent à la sécurité du
téléphérique.
II-1-1 MOTORISATION PRINCIPALE
Il est constitué d'une machine à courant
continu à excitation indépendante de 400 kW. Le
système est entraîné, depuis la station motrice par
celle-ci dont les caractéristiques nominales figurent sur la plaque
signalétique ci-dessous. Cette machine à courant continu est
alimentée à l'aide d'un variateur de vitesse tout thyristors, et
est refroidie par un ventilateur à entraînement
séparé .Elle entraine l'arbre de la poulie motrice sur lequel est
monté l'un des deux dynamos à travers un réducteur de
rapport 15,4. Le frein de service agit généralement sur
le volant d'inertie situé sur l'arbre rapide en sortie de moteur, et
Compte tenu des cycles de fonctionnement, la machine associée au
variateur possède une capacité de surcharge de 1,6 fois son
courant nominal.
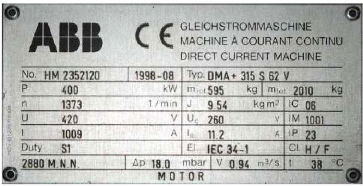
Fig.2 Plaque signalétique du moteur à
courant continu
La machine à courant continu choisie est donnée
pour sa puissance, cette puissance ne correspond pas à la puissance
"catalogue" du constructeur. La machine a en effet été
déclassée à cause de l'altitude. D'où le
coefficient de correction ou de déclassement s'écrit

Kd = P1/P2
(Kd est donné en %)
P1 : puissance corrigée
P2 : puissance catalogue
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 23
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
Le facteur de correction de la puissance de la
machine à courant continu est fonction de l'altitude et de la
température ambiante ; le réducteur à pour rapport
l'expression ci après :
r =
?er
?sr (Avec r 1) (1)
(2)
La conservation de puissance se déduit sous la
formule :

Psr = Per.
Tired
Psr = Csr. ?sr (3) et Per= Cer. ?er (4) en
remplaçant (3) et (4) dans la formule (2) on obtient :
Csr. ?sr = Cer. ?er. fired
|
|
|
Csr= (Cer.
?er. Tired) /?sr
|
|
|
|
|
|
|
|
Et en faisons agir (1) tout en tirant ?sr on aboutit au
résultat suivant : Csr = Cer. F. Ti
red
L'expression du couple en entrée du
réducteur est définit par la formule suivante :
csr
Cer -- F 11 red
|
avec Csr =
|
|
T pc
F.Rp
Ti pc : Rendement de la poulie / câble
F : Force exercée par le câble
tracteur Csr : Couple à la sortie du
réducteur
Per : puissance d'entrée
?er : vitesse d'entrée
Psr : puissance de sortie
?sr : vitesse de sortie
Cer : Couple à l'entrée du
réducteur
Rp : Rayon de la poulie
Poulie motrice
Machine à courant continu

Réducteur de rapport r=15,4
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 24
Fig. 3 Chaîne cinématique
simplifiée
Étude et réalisation d'un moyen de
transport par câble aérien commandé par un API
adaptable
(Téléphérique)
|
2011
|
|
|
|
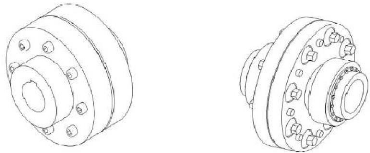
Les machines sont raccordées les une des autres par
des accoupleurs .La MCC est accouplé par un accoupleur moteur
réducteur et le réducteur à la poulie motrice par un
accoupleur réducteur poulie. Il est évident que les deux
accoupleurs ne soient pas de identique.
Projet de fin de cycle rédigé par MOELET GOMA
Jean Hermann Page 25
Fig.4a Accoupleur moteur -réducteur Fig.4b
Accoupleur réducteur - poulie
Les entrainements doivent être équipés de
deux freins indépendants l'un de l'autre. Dans le cas où
l'installation fonctionne avec l'entraînement de secours, un seul frein
agissant sur la poulie motrice est suffisant. Les freins agissent par
frottement. Ils peuvent être communs à plusieurs
entraînements. Chacun des deux freins assurent l'arrêt et
l'immobilisation de l'installation dans le cas de charge le plus
défavorable prévu.
Chacun des freins est dimensionné de sorte que la
décélération moyenne calculée sur l'entière
distance d'arrêt à vitesse nominale maximale puisse être au
moins égale à : 0,5 m/s2. Afin
d'éviter des freinages pouvant constituer un danger pour les passagers
ou provoquer des dommages matériels, le système de freinage
permet d'adapter la force de freinage à la charge de l'installation.
| 

