III.2.2. Gyroscope MPU-6050 :
Nous avons seulement besoin de corriger le mouvement
indésirable du quad rotor, le Gyro c'est le capteur idéal de
notre projet. J'ai choisi le MPU-6050 Figure 3.2, car il est
très facile à obtenir, il est également très bon
marché et il détient d'un accéléromètre et
un gyroscope à la fois, ceci est très pratique lors de la
programmation d'une IMU. La centrale inertielle ou l'IMU est un ensemble de
capteurs qui peut être installé au bord de n'importe quel corps
mobile pour lire les données des mouvements de ce corps. Ce type de puce
est en réalité ce qu'on appelle un micro système
électromécanique ou un MEMS pour abrégé, ceci est
rien d'autre que des capacités qui varient en fonction de
l'accélération et de la vitesse angulaire. Donc pour notre cas,
nous pourrons déterminer et traité les mouvements du quad rotor
dans l'espace. L'interface du module MPU-6050 avec Arduino se fait aux broches
(SCL et SDA) à l'intermédiaire d'une liaison I2C.
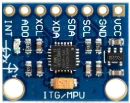
Figure 3.2 : Unité de Mesure de l'Inertie
gyroscopique MPU-6050.
Le mouvement angulaire sur le quadrotor est partout le
même. Donc, peu importe où se trouve le gyroscope. Mais c'est
toujours une bonne idée de monter le gyroscope au centre de
gravité du quad où les vibrations sont les plus faibles.
III.2.3. Les moteurs sans balais « Brushless »
:
Dans le cadre de ce projet, j'ai besoin des moteurs de petite
masse et à la fois de très haute vitesse avec un rapport
couple-masse élevée. Pour cela je suis obligé de
travaillé avec les moteurs sans balais ou "Brushless BLDC motor". Comme
le montre la Figure 3.3.
30
Les moteurs brushless sont en fait un type de moteur synchrone
à aimants permanents tourne avec un courant alternatif triphasé
AC. Ils présentent de nombreux avantages par rapport aux moteurs DC
classiques à savoir, leurs longues durées de fonctionnement et
leurs insensibilités aux parasites en plus leurs réponses
dynamiques élevées. Ce type de moteur, c'est ce qui fait tourner
et générer de la poussée pour permettre au drone de voler.
Dans le cas des multirotors, les moteurs génèrent une
poussée vers le haut qui maintient le drone comme un quadcopter volant.
Autrement dit, un moteur sans balai contient un ensemble
d'électroaimants (bobines) qui sont reliés ensemble dans des
paires spécifiques. Ces électroaimants sont connectés en
trois sections principales, de sorte que le moteur brushless comporte trois
fils sortants, Figure 3.4.
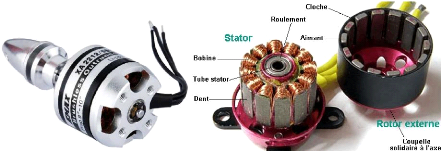
Figure 3.3 : Moteur Brushless EMAX XA2212 1400Kv. Figure
3.4 : Composantes interne du Moteur Brushless.
Le moteur sans balais se compose de deux sections principales
:
· Rotor : la partie qui tourne et a les aimants
montés sur un motif radial.
· Stator : la partie qui ne tourne pas, et dispose
d'électroaimants.
J'utilise pour ce projet quatre moteurs de la marque EMAX
XA2212 1400Kv, ces moteurs ont 27.9 mm de diamètre et 43.16 mm de
longueur, ils pèsent 51g et ils consomment une puissance de 197 Watts
avec un courant max de 16.4A. Le KV veut dire la vitesse de rotation du moteur
pour 1 volt. Il indique le nombre de tour/minute/volt du moteur à vide.
Dans notre cas, le circuit de puissance qui contient les moteurs fonctionne sur
un voltage nominal de 11.1 volts, donc pour cela avec 1400 KV sous 11.1 volts
chaque moteur peut effectuer jusqu'à 15540 tours/minute s'il est
à vide c'est ce qui est appeler rotation par minute RPM.
| 

