Chapitre 3
Conception et mise en oeuvre Lu
Fonctionnement
Chapitre III Conception et mise en oeuvre du
fonctionnement
Chapitre III : Conception et mise en oeuvre du
fonctionnement
III.1. Introduction :
Le but de ce chapitre est de donner une description globale
du principe de fonctionnement des différentes parties de notre
système, en expliquant le hardware que j'ai utilisé pour ce
projet et comment je me suis installé avec des outils et des instruments
électroniques de base pour réaliser le contrôleur de vol du
drone, le transmetteur RF et le récepteur. Je vais également
donner une explication détaillée sur la partie software
utilisé pour ce projet, passant au processus de construction
étape par étape.
III.2. Description du hardware utilisé :
Les quadrotors sont des systèmes complexes, qui
exigent des composants et une instrumentation varié qui doit être
à la fois de haute performance et de poids allégés. Ici on
va introduire les plus importants :
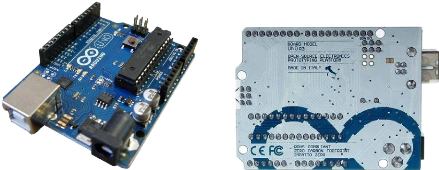
III.2.1. Arduino Uno :
Un Arduino Uno Figure 3.1, c'est le
composant le plus simple pour commencer avec, il me donne beaucoup de couvert
pour continuer à développer mon propre contrôleur de vol du
quadrotor car il s'agit d'un PCB à double face professionnelle avec des
faibles interférences et bruits, donc il convient bien pour le vol.
Alors je pourrais utiliser un Arduino pro mini pour cela, mais le
problème c'est que l'alimentation sur un pro mini est basée d'un
régulateur MIC5205, qui ne peut fournir qu'un 150mA avec un bon
refroidissement. Donc pour garder les choses sur le côté
sûr, j'ai utilisé un Arduino Uno pour la réalisation du
contrôleur de vol.
28
Figure 3.1 : la carte Arduino Uno.
Arduino Uno, est une carte de développement "Open-Source
Hardware" peu coûteuse, ce qui signifie que tout le monde est libre de
télécharger les fichiers de conception et de tourner sa propre
Chapitre III Conception et mise en oeuvre du
fonctionnement
29
Chapitre III Conception et mise en oeuvre du
fonctionnement
Chapitre III Conception et mise en oeuvre du
fonctionnement
version du conseil de développement populaire. Il est
basé sur un microcontrôleur ATmega en 8-bit et Il contient tout le
nécessaire pour supporter le microcontrôleur; Il suffit de le
connecter à un ordinateur avec un câble USB ou de l'alimenter avec
un adaptateur AC-DC ou une batterie pour le démarrer. Dans le cadre de
ce projet le traitement séquentiel des instructions de programme est
important, on utilise souvent les interruptions des pates d'entrés de
l'Arduino Uno pour lire les signaux de commande venant du récepteur
radio aussi en utilise les sorties PWM de l'Arduino Uno pour commander la
rotation des moteurs brushless via les ESC. Finalement l'utilisation du
protocole de communication I2C permet de lire les données provenant de
Gyro, de sorte que nous pouvons agir sur la stabilité du drone.
| 

